Penerapan Aljabar Vektor pada GPS
(Global Positioning System)
Kharis Isriyanto13514064
Program StudiInformatika SekolahTeknikElektrodanInformatika
InstitutTeknologiBandung, Jl. Ganesha 10 Bandung40132, Indonesia [email protected]
Abstract—Pada jaman sekarang ini, saat teknologi
informasi sudah banyak berkembang seiring dengan perkembangan internet, ada satu teknologi yang juga berkembang yaitu GPS (Global Positioning System). GPS dapat menentukan posisi pengguna. Vektor sangat berperan dalam menentukan posisi tersebut karena GPS menerima sinyal dari satelit dan mendapat info jarak satelit dan koordinat satelit. Dengan memanfaatkan info dari 3-4 satelit dapat ditentukan posisi penerima sinyal GPS tersebut.
Keywords—vektor, ruang, koordinat, trilateration
I. PENDAHULUAN
GPS (Global Positioning System) atau Sistem Pemosisi Global adalah suatu sistem yang dibangun untuk menentukan letak di permukaan bumi dengan bantuan penyelarasan sinyal satelit. Pada awalnya GPS dikembangkan oleh departemen pertahanan Amerika Serikat dan penggunaannya hanya diperuntukkan untuk militer Amerika Serikat. Akan tetapi saat ini GPS dapat digunakan oleh siapapun. Penerapannya pun sudah merambah ke berbagai bidang.
Dalam navigasi sudah tidak diragukan lagi betapa pentingnya GPS saat ini. Pada pesawat terbang dan kapal, GPS digunakan untuk menentukan jalur terbang atau pelayaran mereka agar mereka dapat mencapai tujuan. Saat ini mobil pun sudah banyak yang memakai GPS untuk navigasi mereka.
GPS juga digunakan untuk pemetaan geografis, salah satunya dalam pembuatan peta digital yang saat ini dapat diakses oleh siapapun melalui penyedia layanan seperti Google Maps. Selain pembuatan peta, GPS juga dapat digunakan sebagai referensi pengukuran suatu wilayah.
Selain beberapa manfaat GPS yang diuraikan di atas, GPS juga dapat digunakan sebagai sarana hiburan. Saat ini ada beberapa permainan perangkat berjalan(mobile device) yang memanfaatkan lokasi untuk permainannya. GPS berperan sangat besar untuk menentukan lokasi.
Dalam menentukan lokasi pengguna, aljabar vektor dapat berperan dalam penghitungan koordinat pengguna GPS berdasarkan informasi yang didapatkannya dari satelit-satelit GPS. Pada makalah ini akan dibahas
mengenai penerapan vektor pada penentuan posisi pada GPS.
Gambar 1 Dua aplikasi yang menggunakan GPS, yaitu Google Maps dan game Ingress
Sumber:www.digicution.com dan cnet1.cbsistatic.com
II. DASAR TEORI
A. Sistem Persamaan Lanjar
Untuk menyelesaikan persamaan-persamaan pada aljabar vektor, kita memerlukan sistem persamaan lanjar atau sistem persamaan linier. Sistem persamaan lanjar adalah metode untuk menyelesaikan persamaan lanjar.
Untuk menyelesaikan persamaan lanjar, kita dapat memakai matriks augmented dan metode eliminasi Gauss untuk menghasilkan matriks eselon, atau menggunakan metode eliminasi Gauss Jordan untuk menghasilkan matriks tereduksi.[1]
Misalnya kita mempunyai 3 persamaan yang harus diselesaikan seperti di bawah ini
2x1 + 3x2 –x3 = 5 4x1 + 4x2 –3x3 = 3 -2x1 + 3x2 –x3 = 1
Dalam bentuk matriks augmented, persamaan tersebut dituliskan sebagai berikut.
2 3 −14 4 −3 −2 3 −1อ
5 3 1൩
Untuk menyelesaikannya, kita harus melakukan OBE (Operasi Baris Elementer) sampai matriks 3x3 di sebelah kiri menjadi salah satu dari matriks di bawah ini. Bintang adalah angka apa saja.
1 ∗ ∗0 1 ∗ 0 0 1൩ atau
1 0 0 0 1 0 0 0 1൩
OBE dilakukan dengan cara membagi suatu baris dengan konstanta, mengurangi suatu baris dengan n kali baris lainnya, atau menukar suatu baris dengan baris lainnya. Pertama kita harus membuat 1 utama pada kolom pertama di baris pertama. Kemudian kurangi semua baris yang lain dengan n kali baris pertama agar elemen matriks di bawah 1 utama tersebut harus sama dengan 0. Begitu seterusnya sampai didapatkan matriks eselon. Untuk lebih jelasnya kita akan melakukan OBE tersebut.
2 3 −14 4 −3 −2 3 −1อ 5 3 1൩R1/2 1 3/2 −1/2 4 4 −3 −2 3 −1 อ 5/2 3 1 ൩ R3+2R1 1 3/2 −1/2 0 −2 −1 −2 3 −1 อ 5/2 −7 1 ൩R1/2 1 3/2 −1/20 −2 −1 0 6 −2 อ 5/2 −7 6 ൩ R2/-2 1 3/2 −1/20 1 1/2 0 6 −2 อ 5/2 7/2 6 ൩R3-6R2 1 3/2 −1/20 1 1/2 0 0 −5 อ 5/2 7/2 −15൩ R3/-5 1 3/2 −1/20 1 1/2 0 0 1 อ 5/2 7/2 3 ൩ R1/2
Sampai sini kita mendapat matriks eselon dan kita sudah bisa mendapatkan nilai x, y, dan z dengan cara substitusi satu persatu mulai dari baris paling bawah ke atas, seperti di bawah ini.
x3 = 3 x2 = 7/2 - 1/2x3 = 7/2 - ½(3) = 4/2 = 2 x1 = 5/2 - 3/2x2 +1/2 x3 = 5/2 - 3/2(2) + ½ (3) = 5/2 – 3 + 3/2 = 1
Metode di atas adalah metode eliminasi Gauss. Jika kita ingin melakukan eliminasi Gauss-Jordan kita hanya tinggal melanjutkan sampai didapatkan matriks identitas 3x3 di sebelah kiri. Untuk lebih jelasnya lihat proses berikut. 1 3/2 −1/20 1 1/2 0 0 1 อ 5/2 7/2 3 ൩R2-1/2R3 1 3/2 −1/20 1 0 0 0 1 อ 5/2 2 3 ൩ R1 + 1/2R3 1 3/2 00 1 0 0 0 1อ 4 2 3൩ R1-3/2R2 1 0 0 0 1 0 0 0 1อ 1 2 3൩
Setelah didapatkan matriks eselon tereduksi kita sudah dapat melihat masing-masing nilai x1, x2, dan x3, yaitu 1, 2, dan 3. Kita hanya tinggal melihat dari atas ke bawah.
B. Aljabar Vektor
Kuantitas fisik dibagi menjadi dua jenis yaitu skalar dan vektor.[1] Skalar hanya memiliki magnitude atau besaran saja. Vektor selain memiliki magnitude juga mempunyai arah. Arah tersebut biasanya dilambangkan dengan anak panah.
Vektor dapat dilambangkan dengan huruf kecil yang dicetak tebal atau dengan huruf kecil yang diberi anak panah di atasnya. Contohnya v, w, r atauݒԦ, ݓሬሬԦ, ݎԦ.
Vektor mempunyai beberapa komponen. Di R2dan di R3 berbeda. Pada R2 vektor mempunyai 2 komponen yaitu v1 dan v2.
v = (v1, v2) atau v = ቂ࢜࢜ቃ
Kita dapat menjumlahkan atau mengurangi dua vektor dengan menjumlahkan komponen-komponennya. Misalnya kita mempunyai vektor v dan w pada Rn dengan
v = (v1, v2, ..., vn) dan w = (w1, w2, . . . , wn), maka hasil penjumlahan dan pengurangannya adalah sebagai berikut.
v +w = (v1 + w1, v2 + w2, . . . , vn + wn)
v -w = (v1 - w1, v2 - w2, . . . , vn - wn)
Vektor dapat dikalikan dengan skalar. Jika kita mengalikan suatu vektor v dengan konstanta skalar k, maka hasil penjumlahannya menjadi seperti berikut.
kv = (kv1, kv2, . . . , kvn)
Panjang atau magnitude dari sebuah vektor disebut sebagai norma dari vektor. Norma dari vektor v dilambangkan dengan ||v||. Norma vektor pada Rn dihitung sebagai berikut.
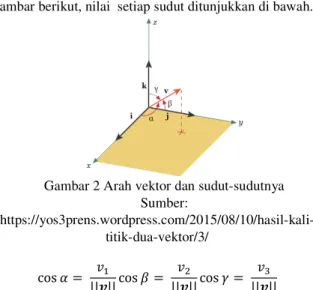
Arah dari vektor dapat dihitung dengan sudut antara vektor dengan sumbu-sumbu pada koordinat kartesian. Misalnya jika vektor v=(v1, v2,v3) maka berdasarkan gambar berikut, nilai setiap sudut ditunjukkan di bawah.
Gambar 2 Arah vektor dan sudut-sudutnya Sumber:
https://yos3prens.wordpress.com/2015/08/10/hasil-kali-titik-dua-vektor/3/
cos ߙ = ||࢜|| cos ߚ = ݒଵ ||࢜|| cos ߛ = ݒଶ ||࢜||ݒଷ Perkalian titik (dot product) atau perkalian dalam euclides antara dua vektor v dan w adalah sebagai berikut, di mana α adalah sudut antara dua vektor tersebut.
v . w = v1 w1 + v2 w2 + ... +vn wn
v . w = ||v|| ||w|| cos α
Perkalian silang atau cross product dari dua vektor pada R3 dapat dicari dengan persamaan berikut.
v x w = ቀቚݓݒଶ ݒଷ ଶ ݓଷቚ , − ቚ ݒଵ ݒଷ ݓଵ ݓଷቚ , ቚݒ ଵ ݒଶ ݓଵ ݓଶቚቁ III. PEMBAHASAN A. Prinsip Kerja GPS
Dalam menentukan posisi, GPS mempunyai tiga komponen utama yang saling bekerja sama untuk menghitung posisi pengguna. Ketiga komponen tersebut adalah GPS ground control stations, GPS sattelites, dan GPS receivers.[2]
Ground control stations adalah stasiun-stasiun yang terdapat di bumi. Stasiun-stasiun tersebut mengontrol kinerja satelit dan jam atomnya. Mereka juga mengoreksi sinyal-sinyal yang diterima dari satelit, kemudian mengembalikannyadan sinyal itulah yang akan dikirimkan ke pengguna.[3] Saat ini control stations berada di Falcon Air Force, Colorado Springs, Ascension Island, Hawaii, Diego Garcia, dan Kwajalein.
Komponen luar angkasa dari GPS memakai minimal 24 satelit yang mengorbit bumi di ketinggian 11.000 nautical miles atau sekitar 20.372 km di atas permukaan bumi.[4] Satelit-satelit tersebut berada dalam enam orbit. Masing-masing orbit mempunyai 4 satelit yang terus-menerus berputar mengelilingi bumi. Satelit-satelit tersebut membutuhkan waktu sekitar 12 jam untuk
mengorbit bumi yang berarti mereka dapat mengelilingi bumi 2 kali sehari. Kemiringan mereka terhadap ekuator bumi adalah 55o yang memungkinkan mereka dapat bekerja optimal.
Setiap satelit mengirimkan sinyal L1 dan L2 pada frekuensi masing-masing 1575,42 MHz dan 1227,6 MHz. L1 mengirimkan kode C/A (Coarse Acquisition) dan P (Precise). Sementara sinyal L2 hanya mengirimkan P.[5] L1 dapat digunakan oleh masyarakat umum sementara L2 hanya dapat dipakai untuk kebutuhan militer saja.[3]Karena militer dapat menggunakan sinyal L1 dan juga sinyal L2, maka akurasi posisi yang didapat akan lebih tinggi dibanding masyarakat umum yang hanya menggunakan sinyal L1.
Gambar 3 Ilustrasi 24 satelit GPS mengelilingi bumi Sumber:
http://www.gps.gov/multimedia/images/constellation.jpg Komponen yang ketiga adalah GPS receiver atau penerima. Ini adalah alat yang digunakan untuk menerima sinyal GPS. Receiver inilah yang biasa kita gunakan dalam smartphone kita saat menyalakan fitur GPS. Receiver mempunyai antena dan processor receiver yang menyediakan positioning, kecepatan, dan ketepatan waktu ke pengguna. Receiver menerima data dari satelit-satelit setelah sebelumnya dikoreksi oleh stasiun pengendali.[3]
Saat mengirimkan sinyal, ada perbedaan waktu antara jam atom yang terdapat pada satelit dengan jam yang terdapat di bumi atau yang terdapat pada receiver disebabkan adanya relativitas waktu yang terjadi. Jam di bumi bergerak lebih lambat dikarenakan adanya gravitasi.[4] Akan tetapi hal itu sudah diatasi oleh pengembang GPS tersebut.
Untuk mendapatkan data posisi yang cukup akurat, GPS receiver harus mendapat sinyal dari 3-4 satelit. Dengan mendapat sinyal dari 3 satelit kita bisa mengetahui latitude dan longitude atau garis lintang dan garis bujur. Jika mendapat 4 sinyal, kita bisa mengetahui altitude atau ketinggian juga. Akan tetapi sebenarnya dengan menggunakan 3 satelit kita bisa mengetahui kemungkinan 2 titik, dan GPS bisa mengeliminasi salah
satu karena salah satu titik tersebut tidak ada di bumi.[6]
B. Peran Vektor dalam Menentukan Posisi
Cara GPS menentukan posisi didapat dengan menghitung data-data yang diterima dari satelit-satelit. Pada subbab sebelumnya sudah dibahas bahwa receiver harus menerima sinyal dari 3 satelit. Receiver menghitung jarak dari setiap satelit dan menentukan posisinya. Metode ini disebut sebagai trilateration. [5] Ilustrasi dari trilateration dapat dilihat sebagai berikut.
Gambar 4 Ilustrasi trilateration pada GPS Sumber:
http://www.buzzle.com/images/electronics/gps-tracking-technology.jpg
Misalkan kita mempunyai kasus trilateration pada R2 sebagai berikut
Gambar 4 Kasus trilateration Sumber:
https://plus.maths.org/content/sites/plus.maths.org/files/ne ws/2012/homeoffice/trilateration.jpg
Dalam bentuk vektor, dapat digambarkan trilateration tersebut sebagai berikut.
Gambar 5 Vektor pada trilateration
Kita mengetahui jarak setiap satelit ke receiver, yaitu norma dari vektor dari setiap satelit ke receiver. Selain itu kita juga mengetahui koordinat dari setiap receiver. Dengan mengetahui dua komponen tersebut kita dapat
membuat persamaan sehingga tersisa variabel bebas x, y, dan z. ||u|| = ඥሺݔ − ݔଵሻଶ+ ሺݕ − ݕଵሻଶ (1) ||u||2 = ሺݔ − ݔଵሻଶ+ ሺݕ − ݕଵሻଶ (2) ||u||2 = ݔଶ− 2ݔݔ ଵ+ ݔଵଶ+ ݕଶ− 2ݕݕଵ+ ݕଵଶ (3) ||u||2+ݔଶ+ ݔଵଶ+ ݕଶ+ ݕଵଶ= −2ݔݔଵ − 2ݕݕଵ (4) Dengan melakukan hal yang sama pada vektor v dan w didapatkan
||v||2+ݔଶ+ ݔ
ଶଶ+ ݕଶ+ ݕଶଶ= −2ݔଶݔ − 2ݕଶݕ (5) ||w||2+ݔଶ+ ݔଷଶ+ ݕଶ+ ݕଷଶ= −2ݔଷݔ − 2ݕଷݕ (6) Karena variabel yang mengandung kuadrat pada sebelah kiri identik, maka kita dapat mengurangi persamaan 5 dan 6 dengan persamaan 4 sehingga didapatkan kedua persamaan berikut.
−2ݔଶݔ − 2ݕଶݕ = ||v||2+ݔଶଶ+ ݕଶଶ (7) −2ݔଷݔ − 2ݕଷݕ = ||w||2+ݔଷଶ+ ݕଷଶ (8) Kedua persamaan tersebut dapat diselesaikan dengan menggunakan sistem persamaan lanjar. 2 variabel x dan y yang menunjukkan posisi hasil trilateration dapat ditemukan.
Seperti yang sudah disinggung sebelumnya, kita dapat menentukan koordinat longitude dan latitude dengan bantuan 3 satelit. Hal itu dibuktikan dengan persamaan di atas. Untuk menentukan altitude atau ketinggian dibutuhkan satu lagi satelit agar dapat menentukan koordinat ketinggiannya. Untuk lebih jelasnya akan dibahas pada subbab selanjutnya dengan studi kasus.
C. Studi Kasus
Studi kasus dan solusi di bawah ini diambil dari paperberjudul “An Undetermined Linear System for GPS” yang disusun oleh Dan Kalman. Dan Kalman menjelaskan dasar dari penentuan posisi pada GPS dengan jelas dan sederhana.[7]
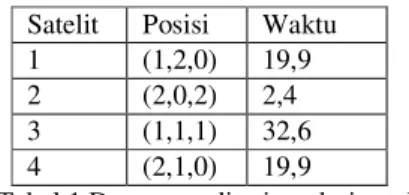
GPS akan menentukan letak sebuah kapal yang berlayar di lautan. Untuk menyederhanakan perhitungan, kita akan mengasumsikan ada koordinat kartesian xyz dengan titik (0,0,0) adalah inti bumi dan panjang satuan x, y, dan z setara dengan radius bumi sehingga nilai dari x2 + y2 + z2 = 1 adalah sama dengan tinggi permukaan laut. Kecepatan cahaya yang dipakai kira-kira sama dengan 0.047 radii /ms. Data yang diterima dari satelit adalah sebagai berikut, meskipun pada kenyataannya data yang diterima tidak akan seperti di bawah ini.
x,y x2,y2 x1,y1 x3,y3 u v w
Satelit Posisi Waktu 1 (1,2,0) 19,9 2 (2,0,2) 2,4 3 (1,1,1) 32,6 4 (2,1,0) 19,9
Tabel 1 Data yang diterima dari satelit Pertama kita akan mencari jarak dari satelit pertama ke kapal. Jarak tersebut dapat dicari dengan persamaan di bawah.
d = 0.047(t-19,9)
Jarak tersebut atau norma vektor dapat dicari dengan d = ඥሺݔ − 1ሻଶ+ ሺݕ − 2ሻଶ+ ሺݖ − 0ሻଶ
Sehingga didapat persamaan berikut ඥሺݔ − 1ሻଶ+ ሺݕ − 2ሻଶ+ ሺݖ − 0ሻଶ = ሺ0,047ሻଶሺݐ − 19,9ሻଶ ሺݔ − 1ሻଶ+ ሺݕ − 2ሻଶ+ ሺݖ − 0ሻଶ= ሺ0,047ሻଶሺݐ − 19,9ሻଶ (1) 2ݔ + 4ݕ − 2ሺ0,047ሻଶሺ19,9ሻݐ = 1ଶ+ 2ଶ− ሺ0,047ሻଶሺ19,9ሻଶ+ ݔଶ + ݕଶ+ ݖଶ− ሺ0,047ሻଶݐଶ (2) Ketiga data satelit bisa diturunkan dengan cara yang sama. 4ݔ + 4ݖ − 2ሺ0,047ሻଶሺ2,4ሻݐ = 2ଶ+ 2ଶ− ሺ0,047ሻଶሺ2,4ሻଶ+ ݔଶ+ ݕଶ + ݖଶ− ሺ0,047ሻଶݐଶ (3) 2ݔ + 2ݕ + 2ݖ − 2ሺ0,047ሻଶሺ32,6ሻݐ = 1ଶ+ 2ଶ+ 1ଶ− ሺ0,047ሻଶሺ32,6ሻଶ + ݔଶ+ ݕଶ+ ݖଶ− ሺ0,047ሻଶݐଶ (4) 4ݔ + 2ݕ − 2ሺ0,047ሻଶሺ19,9ሻݐ = 2ଶ+ 1ଶ− ሺ0,047ሻଶሺ19,9ሻଶ+ ݔଶ + ݕଶ+ ݖଶ− ሺ0,047ሻଶݐଶ (5) Kurangi persamaan 2, 3, dan 4 dengan persamaan 1. 2ݔ − 4ݕ + 4ݖ + 2ሺ0,047ሻଶሺ17,5ሻݐ = 8 + 5 − ሺ0,047ሻଶሺ19,9ଶ− 2,4ଶሻ (6) 2ݕ + 2ݖ − 2ሺ0,047ሻଶሺ12,7ሻݐ = 3 + 5 − ሺ0,047ሻଶሺ19,9ଶ− 32,6ଶሻ (7) 2ݔ − 2ݕ − 2ሺ0,047ሻଶሺ0ሻݐ = 8 + 5 − ሺ0,047ሻଶሺ19,9ଶ− 19,9ଶሻ (8) Dalam bentuk matriks augmented persamaan-persamaan tersebut dapat ditulis sebagai berikut
2 −4 40 −2 2 2 −2 0อ
0,077 3,86 −0,056 −3,47
0 0 ൩
Menyelesaikan persamaan tersebut didapat matriks berikut. 1 0 00 1 0 0 0 1อ 0,095 5,41 0,095 5,41 0,067 3,67൩
Jadi kita mendapatkan solusi umum sebagai berikut. ݔ = 5,41 − 0,095ݐ
ݕ = 5,41 − 0,095ݐ ݖ = 3,67 − 0,067ݐ
Substitusi solusi tersebut pada persamaan 1 didapatkan: ሺ5,41 − 0,095ݐ − 1ሻଶ+ ሺ5,41 − 0,095ݐ − 2ሻଶ
+ ሺ3,67 − 0,067ݐሻଶ = ሺ0,047ሻଶሺݐ − 19,9ሻଶ 0,02ݐଶ− 1,88ݐ + 43,56 = 0
Dari persamaan tersebut didapat nilai t adalah 43,1 atau 50. Jika kita memakai nilai t=43,1 kita mendapat posisi kapal pada (1,317, 1,317, 0,790) yang mempunyai panjang 2. Itu berarti kapal kita tidak berada di lautan karena jarak inti bumi dengan permukaan laut adalah 1. Jika kita memakai nilai t=50, kita mendapat posisi kapal (0,667, 0,667, 0,332) yang mempunyai panjang 0,997. Nilai tersebut mendekati 1 yang berarti kapal berada di permukaan laut. Jadi kita dapat menyimpulkan posisi kapal tersebut ada di posisi (0,667, 0,667, 0,332).
V. KESIIMPULAN
Vektor dapat digunakan untuk menentukan posisi di permukaan bumi dengan GPS. Konsep yang digunakan adalah trilateration dan penyelesaiannya banyak menggunakan sistem persamaan lanjar.
Pada bab pembahasan sudah dibahas pengunaan vektor meskipun hanya mencakup dasar-dasarnya dan tidak memakai sistem GPS sungguhan.
VI. UCAPAN TERIMA KASIH
Penulis mengucap syukur kepada Tuhan Yang Maha Esa atas berkat dan rahmatNya makalah ini dapat selesai tepat pada waktunya. Penulis berterima kasih kepada Bapak Dr. Ir. Rinaldi Munir, M.T. dan Bapak Drs. Judhi Santoso, M.Sc. selaku dosen mata kuliah aljabar geometri. Tidak lupa juga penulis berterimakasih kepada orangtua dan teman-teman yang telah mendukung pengerjaan makalah ini.
REFERENSI
[1] Strang, Gilbert. Linear Algebra and It’s Application, 4th
ed.Publisher, Thomson, Brooks/Cole, 2006.
[2]http://www.streetdirectory.com/travel_guide/12293/gps_vehicle_trac king/how_global_positioning_system_gps_works.html) diakses pada 15 Desember 2015 pukul 11.00
[3] http://www.mandalamaya.com/pengertian-gps-cara-kerja-gps-dan-fungsi-gps/ Diakses pada 15 Desember 2015 pukul 11.00. [4] http://www.astronomy.ohio-state.edu/~pogge/Ast162/Unit5/gps.html
Diakses pada 15 Desember 2015 pukul 20.00.
[5] http://mio.com/technology-trilateration.htm Diakses pada 5 Desember pukul 20.00.
[6] http://www.montana.edu/gps/understd.html diakses pada 15 Desember 2015 pukul 13.00.
[7]Dan Kalman, An underdetermined linear system for GPS, The MathematicalAssociation of America 33:5 (2002) 384-390
PERNYATAAN
Dengan ini saya menyatakan bahwa makalah yang saya tulis ini adalah tulisan saya sendiri, bukan saduran, atau terjemahan dari makalah orang lain, dan bukan plagiasi. Bandung, 15Desember 2015
ttd
Kharis Isriyanto 13514064