Aplikasi Kamera Pengawas untuk Deteksi dan Tracking Objek
Gembong Edhi Setyawan
1)Meivi Kartikasari
2)Mukhlis Amien
3)STIKI, Malang, email: 1 )[email protected], 2)[email protected], 3)[email protected]
ABS TR AK
Salah satu aplikasi dalam bidang teknologi informasi dan telekomunikasi adalah membangun suatu sistem pengawas yang berbasis kamera. Dalam penelitian ini akan membahas perancangan kamera yang dapat mengikuti objek bergerak terutama untuk mendeteksi objek bergerak dan menentukan kontroler sebagai pengendali untuk menggerakkan kamera agar kamera dapat melakukan tracking terhadap objek. Aplikasi ini mengembangkan pergerakan kamera agar dapat bergerak secara otomatis baik secara vertikal maupun horisontal pada saat menangkap sebuah objek yang bergerak. Pada sistem ini digunakan komputer untuk mengolah citra dari objek, untuk mendeteksi objek bergerak, menentukan titik pusat objek dan menentukan titik pusat lensa kamera sebagai sensor posisi. Selanjutnya informasi pengolahan citra digunakan sebagai data untuk menggerakkan kamera. Selain komputer dibutuhkan rangkaian mikrokontroler AT89S51, Rangkaian DAC, Pengkondisi Sinyal, Driver Motor, Motor Servo dan Web Kamera. Untuk mengendalikan posisi kamera digunakan kontroler PID digital dengan metode penalaan Zieger Nichols. Hasil terbaik yang didapat untuk kontrolernya adalah kontroler proporsional dengan nilai parameter Kp=3,5.
Kata Kunci: pengolahan citra digital, mikrokontroler, PID, zieger-nichols, image processing
1. PENDAHULUAN
Perkembangan teknologi informasi dan
telekomunikasi saat ini sangatlah pesat baik pada bidang perangkat keras maupun perangkat lunak. Kebutuhan akan informasi yang bersifat cepat dan akurat dewasa ini sangatlah diperlukan. Salah satu alasan merancang kontroler kamera yang dapat mengikuti objek bergerak secara otomatis adalah karena dapat diterapkan untuk pengawasan ataupun keamanan guna diaplikasikan dalam lingkungan perusahaan, perkantoran atau perumahan sebagai
pemantauan aktifitas karyawan, mesin-mesin
produksi, keamanan dan lain-lain. Dengan adanya aplikasi ini diharapkan pihak-pihak yang bertanggung jawab dapat memantau suatu lokasi secara terus menerus hanya dengan menggunakan komputer.
Pemanfaatan kamera sebagai pengawas telah banyak diimplementasikan diantaranya oleh Azikin (2005), yang merancang pengawas kamera dalam jaringan komputer dimana kamera dapat digerakkan dan sebagai penggeraknya adalah motor stepper. Pergerakkan kamera ini masih secara manual karena menunggu input melalui komputer oleh seorang operator. Alves (2004) juga telah merancang kamera pengawas yang memiliki pergerakkan kamera yang lebih kompleks dengan menggunakan robot tangan sehingga dapat bergerak secara vertikal dan horisontal dan penggerak kameranya menggunakan motor servo.
Akan tetapi pergerakan kamera juga masih
membutuhkan input dari operator.
Pergerakan kamera yang masih membutuhkan input dari operator (Alves, 2004; Azikin, 2005) tentu saja bukanlah sebuah kamera pengawas yang bagus karena operator harus selalu menunggu didepan komputer untuk mengamati apa yang ditangkap oleh kamera. Untuk itu dalam penelitian ini akan dibuat kamera pengawas yang dapat mengikuti pergerakan objek secara otomatis sehingga untuk menggerakkan kamera sudah tidak tergantung lagi pada operator komputer. Sebagai penggerak dalam penelitian ini akan menggunakan motor servo sesuai dengan apa yang dilakukan oleh Alves (2004), karena penggunaan motor stepper (Azikin, 2005) ketepatan dan kecepatan kamera mengikuti objek masih sangat diragukan. Untuk mekanik penggerak kamera dalam penelitian ini juga diharapkan seperti Alves (2004) yang dapat bergerak secara vertikal dan horisontal karena dengan bergerak secara vertikal dan horisontal luas daerah yang dapat ditangkap oleh kamera dapat lebih luas.
Agar kamera dapat mengikuti objek yang bergerak akan diterapkan sistem kendali posisi dengan menggunakan sistem loop tertutup. Penggunaan sistem loop tertutup sangat berfungsi untuk menjaga kestabilan dan ketepatan posisi kamera dalam menangkap objek yang sedang bergerak, karena hasil awal dari suatu sistem akan diumpan balikkan untuk dibandingkan dengan inputnya. Pembandingan dengan input ini bertujuan untuk mengetahui masih adanya suatu kesalahan posisi atau tidak dengan hasil yang diinginkan, jika masih ada kesalahan maka besarnya kesalahan ini akan dikirimkan ke sinyal kendali untuk diperbaiki, keadaan ini akan terus diulang sampe posisinya sesuai dengan yang
diinginkan atau kesalahannya adalah nol (Pitowarno, 2006).
Kontroler yang digunakan adalah menggunakan sistem kendali digital PID (Proporsional Integral
Differential). Pemilihan sistem kendali digital PID ini
bukanlah tanpa alasan, sudah banyak para ahli yang mencoba memperkenalkan alternatif lain sebagai pengganti unit-unit P, I dan D, tetapi tetap saja terbukti bahwa ketiga unsur itu masih tetap yang terbaik dan mampu menjawab tantangan sistem pengendalian (Gunterus, 1994). Penggunaan sistem kendali digital PID dalam aplikasinya akan dapat
diprogram sesuai kebutuhan apakah sebagai
pengendali P, PI atau PID, sehingga software dari aplikasi ini mempunyai kelebihan karena bisa diterapkan kedalam sistem kendali posisi yang lain yang mungkin menggunakan spesifikasi produk motor yang berbeda atau menggunakan jenis kamera yang berbeda yang mengakibatkan beban dari sistem berbeda pula.
Sistem kendali digital artinya bahwa sistem kendali ini akan dikerjakan oleh perangkat digital, misalkan saja adalah komputer, sehingga sinyal-sinyal didalam pengendali juga dikerjakan didalam bahasa komputer. Penggunaan bahasa komputer untuk sistem kendali digital tentu saja mempunyai manfaat akan lebih menghemat hardware yang diperlukan dalam
mengendalikan posisi kamera. Didalam
mengendalikan sesuatu, selalu diinginkan bahwa
keluaran/output haruslah sama dengan
referensi/inputnya, akan tetapi dalam dunia nyata keadaan ideal seperti ini tidak pernah tercapai sepenuhnya. Walaupun demikian, orang akan berusaha mencari cara agar sedekat mungkin mencapai keadaan ideal. Upaya utama yang dilakukan orang adalah dengan menyetel sistem atau melakukan penalaan pada sistem.
Didalam sistem kendali loop tertutup, telah dijelaskan bahwa dibutuhkan sinyal umpan balik untuk dibandingkan dengan inputnya. Agar sinyal umpan balik ini dapat dibandingkan dengan inputnya maka besaran sinyal umpan balik harus sama dengan inputnya. Untuk menyamakan besaran ini dibutuhkan suatu sensor. Karena ouput dari sistem adalah posisi, maka akan dibutuhkan sensor posisi. Dalam penelitian ini sebagai sensor posisi digunakan pengolahan citra untuk mencari titik tengah dari suatu objek.
2. SISTEM MODEL
Penelitian ini bertujuan agar kamera dapat mengikuti objek yang bergerak dan yang terutama adalah menentukan jenis kontroler apa yang cocok digunakan dalam aplikasi. Diagram blok perangkat dapat ditunjukkan pada gambar 1.
Berdasarkan diagram blok perangkat, sistem kerja
dari aplikasi ini adalah sebagai berikut: Pertama kali
kamera akan menangkap sinyal gambar dilokasi dimana sudut pandang kamera dapat menjangkau suatu objek, selanjutnya sinyal gambar ini akan
dikirimkan ke komputer untuk diolah menggunakan sistem pengolahan citra digital.
Gambar 1. Diagram blok perencanaan alat
Hasil dari software sistem pengolahan citra digital ini yang pertama adalah akan mendeteksi jika ada objek yang ditangkap oleh kamera. Hasil dari software ini akan berperan sebagai input untuk menentukan posisi kamera. Selanjutnya motor akan menyesuaikan agar kamera tepat pada posisi fokus objek. Lalu jika objek tersebut bergerak, software pengolahan citra digital akan menganalisa pergerakan objek tersebut untuk menentukan posisi dari objek. Kemudian untuk mengatur pergerakkan motor secara otomatis perlu adanya suatu kontroler, disini digunakan desain sistem kontroler PID. Algoritma kontroler ini dilakukan oleh software komputer secara digital dan diharapkan bahwa posisi motor untuk menggerakkan kamera tepat pada posisi titik tengah dari objek yang bergerak.
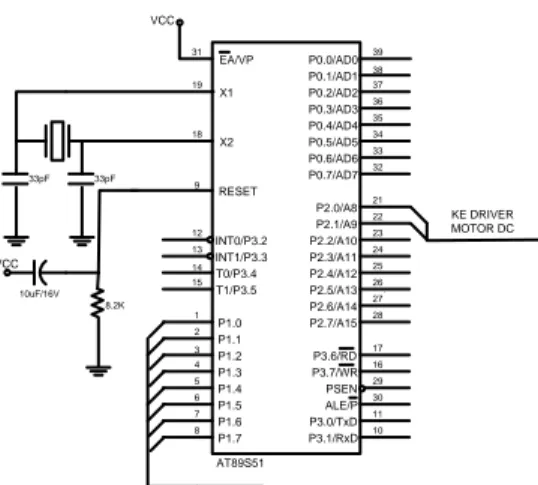
Berdasarkan diagram blok dan cara kerja perangkat, maka yang harus dirancang diantaranya adalah rangkaian mikrokontroler AT89S51, kabel RS232 to TTL, rangkaian DAC dan pengkondisi sinyal, rangkaian driver motor dan perancangan software yang meliputi kontroler PID digital dengan metode penalaan zieger-nichols, interface antara mikrokontroler dan kamera dan pengolahan citra digital untuk deteksi objek. ` P0.0/AD0 P2.3/A11 P2.2/A10 P2.1/A9 P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0 T1/P3.5 T0/P3.4 P2.0/A8 INT1/P3.3 INT0/P3.2 RESET X2 X1 EA/VP P0.7/AD7 P0.6/AD6 P0.5/AD5 P0.4/AD4 P0.3/AD3 P0.2/AD2 P0.1/AD1 P2.6/A14 P2.5/A13 P2.4/A12 PSEN P3.7/WR P3.6/RD P3.1/RxD P3.0/TxD ALE/P P2.7/A15 33pF 33pF 10uF/16V 8.2K AT89S51 1 2 3 4 5 6 7 8 12 13 14 15 9 18 19 31 39 16 17 28 27 26 25 24 23 22 21 32 33 34 35 36 37 38 29 30 11 10 Data ke DAC R-2R VCC VCC KE DRIVER MOTOR DC
Gambar 2. Rangkaian mikrokontroler AT89S51 K a m e r a Gamb ar
Software Kontroler PID
Software Komunikasi dengan AT89S51
Software Pengolahan Citra Digital (Deteksi benda bergerak, Posisi fokus benda dan posisi kamera)
Software Interface dengan Pengguna (GUI)
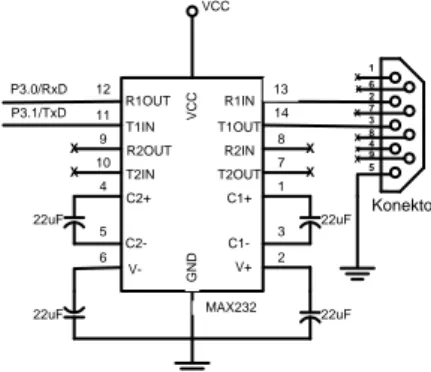
G N D V C C MAX232 VCC 13 14 8 7 1 3 2 6 5 4 10 9 11 12 P3.0/RxD P3.1/TxD R1IN T1OUT R2IN T2OUT C1+ C1-V+ R1OUT T1IN R2OUT T2IN C2+ C2- V-X X X X X X X X x X 1 6 2 7 3 8 4 9 5 Konektor DB9 22uF 22uF 22uF 22uF
Gambar 3. Antar muka Port serial komputer dengan AT89S51 (Nalwan, 2003)
Rangkaian Mikrokontroler AT89S51
Pada aplikasi ini digunakan mikrokontroler AT89S51 dimana rangkaian mikrokontroler ini akan berfungsi untuk komunikasi data antara komputer dengan DAC melalui port serial RS232. Rangkaian mikrokontroler ditunjukkan pada gambar 2.
Kabel RS232 to TTL
Komunikasi dengan port serial komputer
dilakukan menggunakan standar RS232. Oleh karena itu dibutuhkan sebuah antar muka RS232 sebagai perantara antara port serial Mikrokontroler AT89S51 dan port serial komputer.
Data serial dikirimkan oleh komputer melalui port serialnya dalam bentuk RS232 dan diubah menjadi level TTL oleh antar muka RS232 selanjutnya data dapat diterima oleh port serial AT89S51. Rangkaian kabel RS232 to TTL ditunjukkan pada gambar 3. Rangkaian DAC R-2R Ladder dan Pengkondisi Sinyal
Rangkaian DAC R-2R ladder mengkonversikan 8 bit data digital menjadi tegangan analog. Apabila semua bit data berlogika 1 (FFH) maka tidak ada arus
Io yang mengalir sehingga tegangan output (Vo) = 5 V
dan jika semua bit data = 0 (0H) maka mengalir arus
Io dan tegangan output = 10 V. Pada bagian ini ada
suatu level DC 5 Volt yang harus dihilangkan agar output DAC berayun antara 0 sampai 5 V. Untuk menghilangkan level DC 5 volt ini ini menggunakan rangkaian pengkondisi sinyal penguat membalik seperti pada rangkaian dimana nantinya akan menghasilkan output DAC 0 – 5 Volt saja.
` ` ` ` `` ` ` ` ` ` R1 10K R2 10K R3 10K R4 10K R5 10K R6 10K R7 10K R8 10K R9 20K R10 20K R11 20K R12 20K R13 20K R14 20K R15 20K R1 20K R16 10K R17 10K R18 10K Rf 100K R22 10K R21 10K R20 10K HEADER 2 2 1 2 1 HEADER 2 +5V Vcc +5V -12V +12V HEADER 10 1 2 3 4 5 6 7 8 9 10 1 2 3 4 11 7 +5V 4 11 5 6 12 13 14 4 11 11 10 9 4 8 + + + +
-Gambar 4. Rangkaian DAC dan pengkondisi sinyal
Gambar 5. Driver motor
Karena tegangan output ini dibutuhkan untuk menggerakkan motor dengan kebutuhan tegangan maksimal sebesar 12 volt maka output tegangan dari 0 – 5 Volt tadi dihubungkan dengan rangkaian pengkondisi sinyal penguat tidak membalik, agar output tegangan dapat berayun dari 0 – 12 volt sesuai kebutuhan yang akan digunakan untuk menggerakkan motor. Perlu diketahui bahwa ouput maksimal dari OP-AMP tergantung dari tegangan supplynya, dan besarnya output maksimal 1,5 Volt dibawah tegangan supply positifnya. Disini digunakan tegangan supply 12 volt berarti output maksimal sekitar 10,5 volt.
Jika digunakan R sebesar 10 KΩ, maka dengan rumus Vi R Rf Vo 1 . (1)
Jadi diketemukan Rf sebesar 11 KΩ agar menghasilkan tegangan 12 V. disini digunakan Rf sebesar 100 KΩ sehingga hasil keluaran tegangan dapat diatur sesuai dengan keperluan.
Rangkaian DAC R-2R Ladder secara lengkap dengan rangkaian pengkondisi sinyal ditunjukkan pada gambar 4.
Driver Motor DC
Dalam aplikasi ini motor DC digunakan untuk menggerakkan kamera, yang dapat bergerak searah jarum jam atau sebaliknya. Karena tegangan yang keluar dari DAC dan rangkaian pengkondisi sinyal adalah positif, maka diperlukan sebuah rangkaian yang dapat mengubah arah putaran motor. Untuk mengubah arah putaran motor yang diperlukan adalah rangkaian yang dapat mengubah arah arus yang mengalir melalui motor tersebut. Pada prinsipnya untuk mengubah putaran motor adalah dengan mengubah polaritas tegangan motor.
Pengubahan polaritas tegangan dapat dilakukan dengan menggunakan transistor seperti rangkaian yang ditunjukkan pada gambar 5.
Kontroler PID Digital
Algoritma PID bermaksud untuk melakukan
penjumlahan dari proses-proses penguatan,
pengintegralan dan penurunan nilai error dan mengeluarkan hasil perhitungan sebagai sinyal
kontrol. Algoritma pengolahan data pengendali PID memiliki bentuk persamaan transformasi Z sebagai berikut: ) 1 ( 1 ) 1 .( 2 / . ) ( 1 Z T K Z Z T Ki Kp Z G D (2)
Untuk merealisasikan Persamaan (2) dalam perangkat lunak (sofware), terlebih dulu persamaan itu diubah kedalam persamaan pecahan polinomial z. Kemudian dari persamaan z didapatkan persamaan beda yang ditunjukkan pada persamaan (3).
) 2 ( . ) 1 ( . ) ( . ) 1 ( . ) (k a1mk b0e k b1ek b2e k m (3) dengan : k=0, 1, 2, 3,...
m(k) = keluaran PID saat ini
m(k-1) = keluaran PID sebelum saat ini
e(k) = error masukan saat ini
e(k-1) = error masukan sebelum saat ini Penalaan Kontroler PID
Penalaan kontroler PID digunakan untuk
menentukan parameter pengendali yang mana dalam aplikasi ini menggunakan metode Zieger Nichols (zieger, 1942). Nilai konstanta pengendali sistem ditentukan dengan menggunakan metode osilasi. Pada metode osilasi, pertama ditentukan nilai konstanta pengendali proporsional. Setelah nilai konstanta pengendali proporsional diketahui, ditentukan nilai konstanta pengendali integral dan diferensial.
Langkah-langkah penentuan konstanta pengendali PID adalah sebagai berikut (Gunterus, 2004):
1. Menghubungkan semua perangkat keras. 2. Membuat software yang dapat menampilkan
data dari ADC secara grafik. Grafik ini merupakan grafik tegangan terhadap waktu. 3. Memberikan nilai konstanta proporsional dan
menyetel Ti = ∞ dan Td=0. Nilai konstanta proporsional diubah secara bertahap hingga tanggapan sistem (tampilan grafis pada software) berosilasi secara kontinyu.
Mengamati dan mencatat nilai ultimate gain Ku
dan ultimate period Tu.
Deteksi Objek Bergerak
Prinsip dasar deteksi gerakan (motion detection) adalah dengan membandingkan antara dua buah citra
f(x,y,t1) dan f(x,y,t2) sehingga dihasilkan citra baru
r(x,y) yang memiliku nilai 0 (putih) atau 1 (hitam)
dengan kriteria sebagai berikut (Gonzales, 2002)
lainnya nilai untuk T t y x f t y x f jika y x r 0 ) , , ( ) , , ( 1 ) , ( 1 2 (4)
Dengan T adalah nilai threshold yang besarnya tergantung dengan kepekaan terhadap perubahan yang diinginkan. Citra dari pembanding ini akan mengandung objek yang bergerak. Objek akan ditandai dengan warna hitam, dan latar belakangnya akan ditandai dengan warna putih.
Deteksi Titik Tengah Objek
Berdasarkan persamaan (4) bahwa objek yang bergerak ditandai dengan warna hitam. Untuk
menentukan titik tengah objek dilakukan dengan cara memberi kotak pada objek yang berwarna hitam tersebut kemudian dicari titik tengah dari kotak tersebut dan dianggap itu adalah titik tengah objek. Menentukan Fokus Kamera
Dalam aplikasi fokus kamera ini berfungsi untuk menentukan posisi kamera yang akan dipakai sebagai sinyal umpan balik dimana dibutuhkan untuk pengolahan PID digital. Resolusi ini dibutuhkan untuk menentukan besarnya data gambar(citra) yang akan diolah oleh komputer. Semakin besar resolusinya akan semakin besar data yang diolah atau diidentifikasi oleh kontroler sehingga program akan bekerja lebih lama. Selain berpengaruh terhadap lamanya proses, semakin besar resolusi akan mengakibatkan perpindahan posisi kamera / motor akan semakin lembut karena data posisi yang diolah semakin besar/banyak. Besarnya fokus kamera adalah setengah dari besarnya resolusi.
Mekanik Penggerak Kamera
Gerakan yang diperlukan untuk aplikasi ini adalah relatif pelan dan lembut. Jika kamera dihubungkan dengan poros motor langsung akan menghasilkan perpindahan kamera yang cepat dan tidak lembut. Hal ini tentu tidak sesuai dengan tujuan dari aplikasi ini. Untuk itu diperlukan cara transmisi daya motor agar sesuai dengan kebutuhan. Salah satu metodenya adalah menggunakan sistem gear. Sistem transmisi
gear yang digunakan adalah hubungan gear-belt.
Desain mekanik dari aplikasi ini lebih bersifat
trial and error dalam menentukan besarnya gear yang
dibuat. Trial and error ini memperhatikan beberapa hal, yaitu:
1. Pergerakan yang dihasilkan harus selembut mungkin.
2. Kecepatan respon untuk menggerakkan
kamera sesuai dengan yang diharapkan tidak terlalu lambat dan tidak terlalu cepat. (Jika terlalu lambat akan kehilangan objek yang ditangkap, Jika terlalu cepat akan merusak gambar yang ditangkapnya)
3. Pergerakan kamera tidak merusak gambar yang ditangkapnya.
Dari hasil trial and error diperoleh desain mekanik untuk masing-masing motor (vertikan dan horisontal) ditunjukkan pada gambar 5.
Gambar 5. Mekanik untuk masing-masing motor (vertikal dan horisontal)
MOTOR
Diameter gear kecil = 1,8 cm Diameter gear besar = 5 cm
Perangkat Lunak (Software)
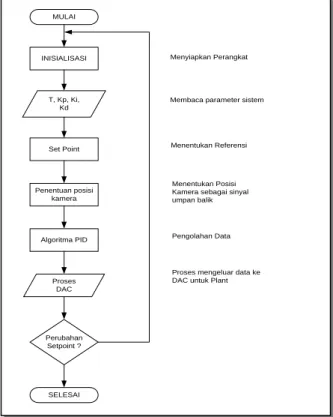
Komputer dilengkapi dengan perangkat lunak agar data masukan setiap periode pencuplikan dapat dibaca dan dibandingkan dengan harga yang diinginkan. Data eror itu dihitung dengan berdasarkan algortima pengendali. Hasil perhitungan itu kemudian dikirim ke mikrokontroler melalui RS232 untuk dilanjutkan ke rangkaian DAC. Diagram alir algoritma perangkat lunak ditunjukkan oleh gambar 6.
Gambar 6. Flowchart perangkat lunak
Saat software dijalankan, yang pertama dilakukan adalah melakukan inisialisasi. Yang dimaksud inisialisasi disini adalah software dapat menangkap sinyal gambar dari kamera selanjutnya dengan software pengolahan citra dapat mendeteksi adanya gerakan objek dan menentukan titik fokus dari objek. Selanjutnya setelah melakukan inisialisasi parameter-parameter Kp, Kd dan Ki ditentukan dimana nilai-nilai parameter ini akan digunakan untuk alogoritma PID. Kemudian menetukan set point, yang menjadi set point disini adalah titik focus dari objek tersebut yang sudah ditentukan lewat software pengolah citra tadi.
Posisi titik fokus ini nantinya akan diterjemahkan ke level tegangan dan nilai ini akan dikirimkan ke
DAC lewat mikrokontroler AT89S51 untuk
menggerakan motor. Akibat dari berputarnya motor fokus kamerapun akan ikut berubah terhadap fokus objek. Dengan analisa menggunakan software pengolah citra perubahan fokus kamera akan dijadikan sinyal umpan balik untuk dibandingkan dengan set
point. Selisih dari hasil perbandingan ini yang dinamakan error.
Software Komunikasi Dengan AT89S51 Pada Komputer
Aplikasi ini membutuhkan komunikasi data antara komputer dengan AT89S51 melalui port serial RS232. Data yang dikirimkan dari komputer ke AT89S51
berasal dari algoritma PID, selanjutnya dari
mikrokontroler data ini dikirimkan ke DAC untuk menggerakkan motor. Sedangkan data yang diterima oleh komputer merupakan sinyal umpan balik yang
berasal dari sensor kamera dengan software
pengolahan citra digital untuk menentukan fokus kamera.
Software Pada Mikrokontroler AT89S51
Software pada mikrokontroler merupakan
interface untuk mengirimkan data dari komputer ke DAC (Digital Analog to Converter).
3. HASIL DAN PEMBAHASAN
Bagian ini membahas tentang data hasil percobaan dan pengujian alat yang telah dibuat dengan tujuan supaya antara perancangan dan pembuatan alat sesuai dengan teori dan praktek. Pengujian ini meliputi pengujian perangkat keras dan perangkat lunak kontroler dan sistem secara keseluruhan. Pengujian perangkat keras dilakukan agar dapat
mengetahui apabila terjadi kesalahan dalam
penggunaan komponen. Sedangkan pengujian perangkat lunak untuk mengetahui apakah program dapat berjalan dengan baik sesuai dengan yang diinginkan. Pengujian perangkat lunak meliputi penalaan kontroler PID dan sistem secara kesuluruhan. Rangkaian DAC R-2R Ladder
Berdasarkan hasil pengujian DAC terlihat
kesalahan data berkisar dari 0,340% sampai dengan 3% dengan rata kesalahan 1.044%. Dengan rata-rata kesalahan kurang dari 5% maka DAC ini bisa dikatakan berjalan dengan baik pada aplikasi yang direncanakan.
Rangkaian Pengkondisi Sinyal
Hasil pengujian rangkaian pengkondisi sinyal terlihat kesalahan data berkisar dari 1.786% sampai dengan 4.522% dengan rata-rata kesalahan 2,732%. Dengan rata-rata kesalahan kurang dari 5% maka rangkaian ini bisa dikatakan berjalan dengan baik pada aplikasi yang direncanakan.
Driver Motor DC
Hasil pengujian driver motor terlihat kesalahan data berkisar dari 0,223% sampai dengan 1.349% dengan rata-rata kesalahan 0.753%. Dengan rata-rata kesalahan kurang dari 5% maka driver motor ini bisa dikatakan berjalan dengan baik pada aplikasi yang direncanakan. MULAI INISIALISASI T, Kp, Ki, Kd Set Point Penentuan posisi kamera Algoritma PID Proses DAC Perubahan Setpoint ? SELESAI Menyiapkan Perangkat
Membaca parameter sistem
Menentukan Referensi
Menentukan Posisi Kamera sebagai sinyal umpan balik
Pengolahan Data
Proses mengeluar data ke DAC untuk Plant
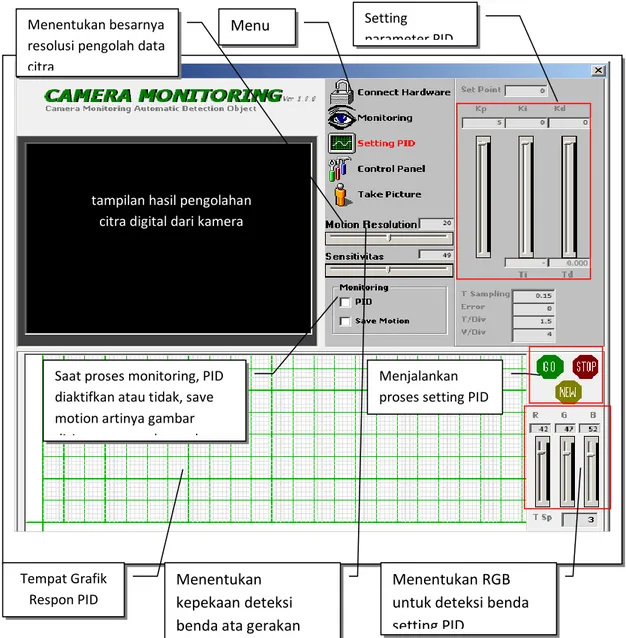
Software Software Interface dengan pengguna (Graphical
User Interface / GUI) merupakan bentuk tampilan
software untuk berinteraksi dengan pengguna. Gambar 7 adalah tampilan saat melakukan setting PID (Setting PID aktif).
Penalaan Kontroler PID
Penalaan kontroler PID ini bertujuan untuk menentukan parameter pengendali proporsional, integral dan differential dengan menggunakan metode zieger-nichols.
Langkah awal adalah dengan membuat sistem berosilasi konstan yang ditunjukkan berdasarkan hasil percobaan seperti pada gambar 8. Dari gambar hasil
percobaan ini memberikan nilai ultimate gain Ku
sebesar 7 dan ultimate period Tu sebesar 4 s. Nilai
yang diperoleh digunakan untuk menghitung nilai parameter pengendali proporsional, integral dan
diferensial. Hasil perhitungan ini ditunjukkan oleh
Tabel 1.
Tabel 1. Hasil Penalaan Parameter PID dengan Metode Osilasi Pengatur P PI PID Kp 3.5 3.2 4.2 Ti - 3.33 2 Td - - 0.5 Kontroler P
Pada pengujian pertama, Sistem kontrol posisi
menggunakan pengendali proporsional (P).
Karakteristik pengendali P diperoleh dengan menyetel parameter integral Ti=∞ dan parameter diferensial Td=0. Pengamatan prilaku sistem didasarkan pada spesifikasi waktu sistem: waktu naik, waktu tunda,
tampilan hasil pengolahan citra digital dari kamera
Menu Tempat Grafik Respon PID Setting parameter PID Menentukan besarnya
resolusi pengolah data citra
Menentukan RGB untuk deteksi benda setting PID
Menentukan kepekaan deteksi benda ata gerakan
Menjalankan proses setting PID Saat proses monitoring, PID
diaktifkan atau tidak, save motion artinya gambar disimpan saat ada gerakan
waktu puncak dan lewatan maksimum. Gambar 9 menunjukkan salah satu hasil respon sistem untuk pengendali proporsional dengan Kp=3,5. Dari hasil
respon sistem dapat diketahui waktu tunda (td) = 0,6s,
Waktu naik (tr) = 0.9s , waktu puncak 1,8s dan lewatan maksimum = 66,67%
Gambar 8. Hasil saat respon berosilasi (T/Div=1.5s)
Gambar 9. Respon sistem dengan Kp=3.5
Kontroler PI
Penalaan kedua bertujuan mengamati pengaruh pengubahan parameter integral Ti pada pengendali PI terhadap spesifikasi sistem. Karakteristik pengendali PI diperoleh dengan menyetel Td=0. Gambar 10 menunjukkan hasil untuk Kp=3,2 dan Ti=3.33. Dari hasil respon sistem dapat diketahui waktu tunda (td) = 0,6s , waktu naik (tr) = 1,5s , waktu puncak (tp) = 2,1s dan lewatan maksimum (Mp) = 100%.
Kontroler PID
Hasil pengujian respon sistem yang menggunakan pengendali PID ditunjukkan oleh Gambar 11 untuk pengendali Kp=4.2, Ti=2 dan Td=0,5. Dari hasil Respon Sistem dapat diketahui waktu tunda (td) = 0,6s , waktu naik (tr) = 2,7s , waktu puncak (tp) = 3,6s dan lewatan maksimum (Mp) = 100%.
Dari semua pengujian Respon sistem yang
memuaskan diperlihatkan oleh pengendali
proporsional.
a. analog dengan rata-rata kesalahan sebesar 1,044 %.
b. Rangkaian pengkondisi sinyal dapat bekerja dengan baik dengan rata-rata kesalahan sebesar 2,732%
c. Rangkaian driver motor yang digunakan dapat
bekerja dengan baik dengan rata-rata
kesalahan sebesar 0,753%
d. Parameter pengendali PID berupa Kp, Ti, Td
ditentukan melalui metode penyetelan
Ziegler-Nichols. Nilai penguatan yang didapat dari percobaan besarnya adalah
Untuk kontroler proporsional Kp = 3,5
Untuk kontroler proporsional plus
integral Kp = 3,2; Ti = 3,33
Untuk kontroler proporsional plus
integral plus diferensial
Kp = 4,2; Ti = 2; Td = 0.5
e. Respon sistem yang memuaskan diperlihatkan oleh kontroler proporsional.
4. KESIMPULAN
Kesimpulan yang dapat diambil setelah
melakukan penelitian, perancangan, pembuatan alat, dan pengujian alat adalah:
a. Perancangan kontroler kamera yang dapat mengikuti objek bergerak ini menggunakan perangkat keras rangkaian DAC R-2R Ladder, pengkondisi sinyal, motor servo dan mikrokontroler AT89S51 untuk antar muka komputer melalui port serial.
b. Perangkat lunak digunakan untuk pengolahan citra dari kamera, pengolahan kontrol digital PID dan untuk antar muka dengan pengguna. c. Rangkaian DAC R-2R yang digunakan
mampu mengubah data digital menjadi data
DAFTAR REFERENSI
[1] Alves, R.J., (2004), “Grasp2 – Teleoperated Robotic Arm With Feedback Live Camera
Feed”, http://zodiak.f2o.org
[2] Azikin, A., ST, (2005), Kamera Pengawas
Berbasis Open Source, PT. Elex Media
Komputindo, Jakarta
[3] Gonzales, C.R., Woods, E.R., (2002), Digital
Image Processing, 2nd edition, Prentice Hall
Posisi/Div = 4 T/Div = 1.5 s
Gambar 10. Respon sistem dengan Kp=3.2 dan Ti=2
Gambar 11. Respon sistem dengan Kp=4,2,Ti=2 dan Td=0,5
[4] Gunterus, F., (1994), Falsafah Dasar: Sistem
Pengendalian Proses, PT Elex Media Komputindo, Jakarta.
[5] Nalwan, P.A., (2003), Teknik Antarmuka dan
Pemrograman Mikrokontroler AT89C51, PT.
Elex Media Komputindo, Jakarta
[6] Pitowarno E., (2006). Robotika – Desain,
Kontrol dan Kecerdasan Buatan, ANDI Offset,
Yogyakarta
[7] Ziegler, J. G., dan Nichols, N. B., (1942), “Optimal settings for automatic controllers”, Trans. ASME, vol. 64, pp. 759–768.