DAFTAR SINGKATAN
SV : Solenoid Valve
pH : Potential of hydrogen LED : Light Emitting Dioda LDR : Light Dependent Resistor ADC : Analog to Digital Converter
BAB I
PENDAHULUAN 1.1 Latar BelakangAir merupakan sumber kehidupan yang sangat diperlukan oleh makhluk hidup, seperti untuk memasak, mencuci, mandi, dan membersihkan kotoran yang ada di sekitar rumah. Air juga digunakan untuk keperluan industri, pertanian, pemadam kebakaran, tempat rekreasi, sarana transportasi, sebagai sumber energi seperti untuk PLTA (Pembangkit Listrik Tenaga Air) dan lain-lain. Air dapat digolongkan menjadi dua bagian yaitu air bersih dan air kotor yang keduanya memiliki karakteristik masing-masing. Air bersih merupakan salah satu jenis sumber daya berbasis air yang bermutu baik dan dapat dimanfaatkan oleh manusia untuk dikonsumsi atau melakukan aktivitas sehari-hari.
Selain udara, air merupakan zat yang paling penting dalam kehidupan. Sekitar tiga per empat bagian dari tubuh kita terdiri dari air dan tidak seorangpun dapat bertahan hidup lebih dari 4-5 hari tanpa minum air. Air juga bermanfaat untuk menghilangkan racun dan limbah dari tubuh, sehingga tubuh bersih dan terbebas dari masalah penyakit. Tidak hanya hal-hal positif saja yang dapat diberikan oleh air bersih, tetapi hal negative juga terdapat pada air, seperti penyakit. Penyakit-penyakit yang menyerang manusia dapat juga ditularkan dan disebarkan melalui air yang berkualitas rendah(kotor). Kondisi tersebut tentunya dapat menimbulkan wabah penyakit dimana-mana. Ditinjau dari sudut ilmu kesehatan masyarakat, penyediaan sumber air bersih harus dapat memenuhi kebutuhan masyarakat karena persediaan air bersih yang terbatas memudahkan timbulnya penyakit di masyarakat.
Penyediaan air bersih kepada masyarakat memiliki peran yang sangat penting dalam meningkatkan lingkungan atau kesehatan masyarakat, yang memiliki peran dalam mengurangi jumlah orang dengan penyakitnya, terutama penyakit yang berhubungan dengan air, dan berperan penting dalam meningkatkan standar atau tingkat (kualitas) hidup, karena kualitas air yang terjaga menunjukkan kesadaran penduduk suatu wilayah akan pentingnya air bagi kehidupan. Sampai saat ini, penyediaan air bersih bagi masyarakat masih dihadapkan pada beberapa masalah yang kompleks dan sampai sekarang belum dapat sepenuhnya diatasi. Salah satu masalah yang kita hadapi saat ini adalah masih
rendahnya tingkat pelayanan air kepada masyarakat terutama yang tinggal di pinggir-pinggir sungai yang telah tercemar oleh sampah maupun limbah pabrik. Sehingga, hal itu akan memiliki efek pada kesehatan manusia.
Dalam tugas akhir ini penulis bermaksud untuk merancang- bangun alat pendeteksi kualitas air yang digunakan untuk menyadarkan masyarakat akan pentingnya air bersih bagi kehidupan bukannya hanya dilihat dari kejernihan air tersebut, akan tetapi dari kandungan zat yang ada di dalamnya.
1.2 Perumusan Masalah
Masalah yang dibahas pada Tugas Akhir ini adalah:
a. Bagaimana cara membuat sistem yang dapat membantu masyarakat dalam mengkonsumsi air bersih.
b. Bagaimana menggolongkan air yang layak digunakan atau tidak dengan metode fuzzy classifier pada sistem.
c. Bagaimana cara mengkontrol keluaran zat asam dan zat basa pada sistem ini. d. Bagaimana cara menentukan kualitas air pada sistem ini.
1.3 Batasan Masalah
Permasalahan yang akan dibahas pada Tugas Akhir ini akan dibatasi pada beberapa masalah antara lain:
a. Parameter yang di ukur pada sistem kualitas air ini hanya kejernihan dan kebasaannya.
b. Tidak membahas tentang zat-zat yang terkandung dalam air. c. Algoritma yang digunakan adalah logika fuzzy.
d. Sensor yang di gunakan untuk mendeteksi kualitas air adalah sensor pH dan sensor LDR.
e. Sensor LDR mendeteksi intensitas cahaya pada saat keadaan air tenang.
f. Sensor pH mendeteksi keasaman (pH) tanpa melihat temperatur suhu ruangan dengan syarat rentang suhu antara 0 - 80oC
1.4 Tujuan
Tujuan dari Tugas Akhir ini adalah untuk menghasilkan model desain sistem sensor pendeteksi kualitas air yang dapat membantu masyarakat untuk dapat mengkonsumsi air yang layak atau bersih pada aktifitasnya sehari-hari dengan berbasis Arduino Uno dan menggunakan logika Fuzzy serta menggunakan sensor LDR dan sensor pH yang dapat menentukan kualitas air yang akan dikonsumsi oleh masyarakat. 1.5 Metodologi Penelitian
Metodologi penelitian yang akan ditekankan dalam perancangan tugas akhir ini adalah:
1. Studi Literatur
Pada tahap ini dilakukan pengumpulan data dan mempelajari materi- materi yang berkaitan dengan penelitian tugas akhir ini seperti permasalahan dalam pengukuran pH, dan metode kontrol logika fuzzy. Sumber yang digunakan adalah jurnal, text book, dan beberapa website terpercaya.
2. Perancangan dan pembuatan sistem kualitas air dengan menggunakan beberapa komponen pendukung seperti: arduino, sensor pH dan sensor LDR.
3. Pengujian terhadap sistem yang telah dibuat dan direalisasikan untuk mengetahui keakuratan sistem kualitas air
4. Penyusunan buku tugas akhir ini dilakukan seiringan dengan penerapan hasil perancangan tugas akhir.
1.6 Sistematika Penulisan
Tugas akhir ini terbagi dalam beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub – sub yang akan membahas dan menguraikan masalah yang lebih terperinci. Secara garis besar isi dari bab dalam tugas akhir ini adalah sebagai berikut:
1. BAB I : PENDAHULUAN
Merupakan uraian mengenai latar belakang, batasan masalah, rumusan masalah, tujuan, metodologi penelitian, dan sistematika penulisan.
2. BAB II : LANDASAN TEORI
3. BAB III : MODEL SISTEM
Pada bab ini dibahas mengenai perancangan dan pembuatan sistem kualitas air serta komponen-komponen pendukung yang digunakan.
4. BAB IV : PENGUJIAN DAN ANALISA SISTEM
Pada bab ini menguraikan hasil implementasi dan realisasi dari sistem yang telah dirancang.
5. BAB V : KESIMPULAN DAN SARAN
Berisi tentang kesimpulan dan saran terhadap hasil yang diperoleh dari simulasi dan penelitian yang telah dilakukan serta saran untuk pengembangan sistem lebih jauh.
BAB II DASAR TEORI 2.1 Kualitas Air[1]
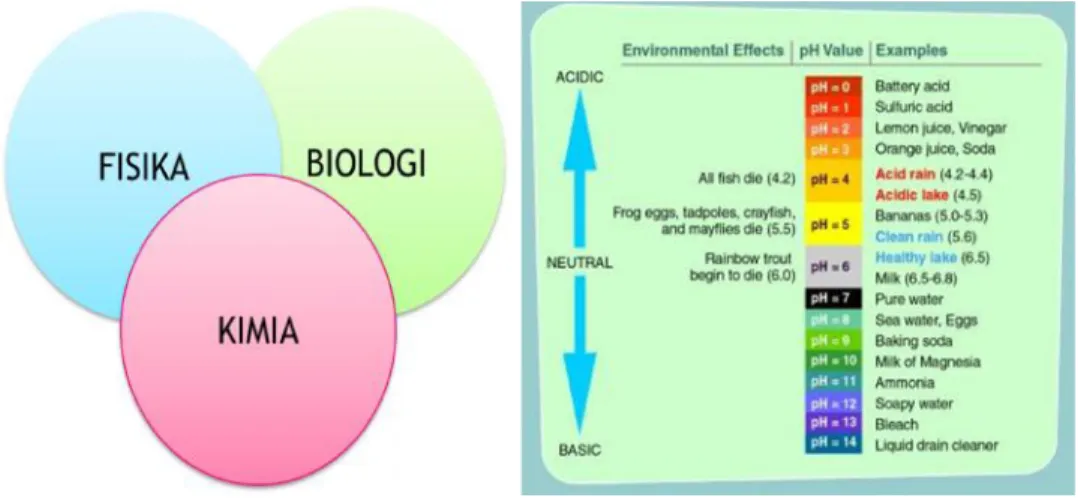
Kualitas air adalah kondisi kalitatif air yang diukur dan di uji berdasarkan parameter-parameter tertentu dan metode tertentu berdasarkan peraturan perundang-undangan yang berlaku (Pasal 1 keputusan Menteri Negara Lingkungan Hidup Nomor 115 tahun 2003). Kualitas air dapat dinyatakan dengan parameter kualitas air. Parameter ini meliputi parameter fisik, kimia, dan mikrobiologis(Masduqi,2009).
Menurut Acehpedia (2010), kualitas air dapat diketahui dengan melakukan pengujian tertentu terhadap air tersebut. Pengujian yang dilakukan adalah uji kimia, fisik, biologi, atau uji kenampakan (bau dan warna). Pengelolaan kualitas air adalah upaya pemaliharaan air sehingga tercapai kualitas air yang diinginkan sesuai peruntukannya untuk menjamin agar kondisi air tetap dalam kondisi alamiahnya.
Parameter Kualitas Air yang digunakan untuk kebutuhan manusia haruslah air yang tidak tercemar atau memenuhi persyaratan fisika, kimia, dan biologis.
· Jernih atau tidak keruh · Bersih secara kimiawi
· Memiliki pH (6.5 - 8.5), kesadahan, dan temperatur yang memadai.
· Tidak mengandung kuman-kuman penyakit seperti disentri, tipus, kolera, dan bakteri patogen penyebab penyakit.
2.2 Logika Fuzzy[2]
Filter adalah suatu device yang memilih sinyal listrik berdasarkan pada frekuensi dari sinyal tersebut. Filter akan melewatkan gelombang/sinyal listrik pada batasan frekuensi tertentu sehingga apabila terdapat sinyal/gelombang listrik dengan frekuensi yang lain (tidak sesuai dengan spesifikasi filter) tidak akan dilewatkan. Rangkaian filter dapat diaplikasikan secara luas, baik untuk menyaring sinyal pada frekuensi rendah, frekuensi audio, frekuensi tinggi, atau pada frekuensi-frekuensi tertentu saja. Untuk menyaring sinyal dengan frekuensi tinggi (lebih dari 1 MHz), biasanya digunakan filter pasif LRC dimana komponenya terdiri dari induktor ( L ), resistor ( R ) dan kapasitor ( C ). Namun untuk menyaring sinyal listrik pada rentang frekuensi yang rendah (1Hz-1MHz), akan dibutuhkan nilai komponen induktor yang besar sekali sehingga dalam produksi filter dengan frekuensi rendah secara komersial sulit untuk dilakukan. Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input kedalam suatu ruang output. Titik awal dari konsep modern mengenai ketidakpastian adalah paper yang dibuat oleh Lofti A Zadeh (1965) yang memperkenalkan teori yang memiliki obyek-obyek dari himpunan fuzzy yang memiliki batasan yang tidak presisi dan keanggotaan dalam himpunan fuzzy, dan bukan dalam bentuk logika benar (true) atau salah (false), tapi dinyatakan dalam derajat (degree). Konsep seperti ini disebut dengan Fuzziness dan teorinya dinamakan Fuzzy Set Theory. Fuzziness dapat didefinisikan sebagai logika kabur berkenaan dengan semantik dari suatu kejadian, fenomena atau pernyataan itu sendiri. Seringkali ditemui dalam pernyataan yang dibuat oleh seseorang, evaluasi dan suatu pengambilan keputusan. Logika fuzzy adalah peningkatan dari logika Boolean yang berhadapandengan konsep kebenaran sebagian. Sementara logika klasik (crisp) menyatakan bahwa segala hal dapat diekspresikan dalam istilah binary (0 atau 1, hitam atau putih, ya atau tidak), logika fuzzy menggantikan kebenaran Boolean dengan tingkat kebenaran. Logika fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat keabuan dan juga hitam dan putih, dan dalam bentuk linguistik, yaitu konsep tidak pasti seperti “sedikit”, “lumayan”, dan “sangat”. Logika ini diperkenalkan oleh Dr. Lotfi Zadeh dari Universitas California, Barkeley pada tahun 1965.Pada dasarnya teori himpunan fuzzy merupakan perluasan dari teori himpunan klasik(crips), keberadaan suatu elemen pada suatu himpunan A hanya akan memiliki 2 kemungkinan 2 keanggotaan, yaitu menjadi anggota A atau tidak menjadi anggota A.
Dalam teori himpunan crisp ini batasan-batasan antara anggota dan bukan anggota jelas sekali.
Himpunan pada fuzzy logic menggunakan 3 parameter untuk membentuk keanggotaan dalam himpunannya. Parameter-parameter yang digunakan untuk membentuk himpunan fuzzy logic adalah:
a. Variabel linguistik
Variabel yang digunakan pada logika fuzzy untuk menggantikan variable kuantitatif yang digunakan pada logika crisp. Variabel linguistik mempunyai nilai yang dinyatakan dengan kata kata, misalnya untuk variabel linguistik pH akan mempunyai nilai berupa nilai linguistik seperti: Asam (A), Netral (N) dan Basa (B).
b. Derajat keanggotaan
Derajat keanggotaan, yaitu nilai-nilai yang terdapat pada variabel linguistik yang dipetakan ke interval [0,1]. Nilai pemetaan inilah yang disebut sebagai nilai keanggotaan atau derajat keanggotaan.
c. Fungsi keanggotaan.
Hubungan-hubungan pemetaan pada nilai linguistik dan nilai keanggotaan (dari 0 sampai 1) yang digambarkan kedalam grafik fungsi sehingga didapatkan suatu fungsi. Fungsi inilah yang disebut sebagai fungsi keanggotaan dalam himpunan fuzzy.
2.2.1 Struktur Dasar Sistem Fuzzy
Di dalam struktur dasar sistem pengendalian pada fuzzy logic control, terdapat empat komponen atau bagian utama yang sangat penting. struktur dasar dari pengendali fuzzy logic control, yang terdiri dari Fuzzifikasi, Knowledge Base, Inferensi dan Defuzzifikasi.
a. Fuzzifikasi
Fuzzifikasi adalah suatu proses untuk mengubah nilai crisp input menjadi nilai fuzzy input. Proses evaluasi rule mengolah fuzzy input sehingga menghasilkan fuzzy output.
b. Knowledge Base
Knowledge base mempunyai fungsi penting dalam pengendalian dengan logika fuzzy karena semua proses: fuzzifikasi, inferensi dan defuzzifikasi bekerja berdasarkan
pengetahuan yang ada pada knowledge base. Knowledge base dibagi dua, yaitu data base dan rule base. Data Base berisi definisi-definisi penting mengenai parameter fuzzy seperti himpunan fuzzy dengan fungsi keanggotaannya yang telah didefinisikan untuk setiap variabel linguistik yang ada. Pembentukkan data base meliputi pendefinisian ruang semesta, penentuan banyaknya nilai linguistik yang digunakan untuk setiap variabel linguistik, dan membentuk fungsi keanggotaan.
Basis rule berisi aturan kendali fuzzy yang dijalankan untuk mencapai tujuan pengendalian. Tiap rule kendali berupa implikasi dan pernyataan kondisional IF – THEN. Aturan-aturan IF – THEN yang ada dikelompokkan dan disusun kedalam bentuk Fuzzy Associative Memory (FAM). FAM ini berupa suatu matriks yang menyatakan input-output sesuai dengan aturan IF – THEN pada basis aturan yang ada. Bentuk matrik dari FAM akan dibahas kemudian. Aturan yang telah dibuat harus dapat mengatasi semua kombinasi-kombinasi input yang mungkin terjadi, dan harus dapat menghasilkan sinyal kendali yang sesuai agar tujuan pengendalian tercapai. Oleh karena itu, maka pembentukkan basis aturan ini sangat penting.
c. Inferensi
Inferensi adalah proses mensimulasikan pengambilan keputusan manusia berdasarkan konsep fuzzy. Ada 2 model yang banyak digunakan:
1. Model Mamdani
Penalarannya menyerupai intuisi atau perasaan manusia
Proses perhitungannya cukup kompleks sehingga membutuhkan waktu relatif lama Menghasilkan ketelitian yang tinggi
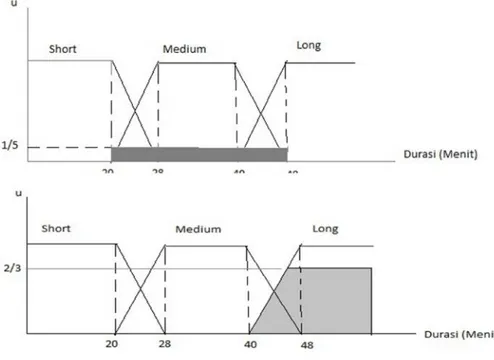
Jika menggunakan Model Mamdani, dapat digunakan dua cara inferensi, yaitu clipping (alpha-cut) atau scaling. Metode yang paling umum digunakan adalah clipping karena mudah diimplementasikan dan bila diagregasikan dengan fungsi lain akan menghasilkan bentuk yang mudah di-defuzzifikasi.
Proses inferensi menggunakan Model Mamdani menggunakan proses clipping menghasilkan dua area abu-abu seperti gambar (2.2) berikut:
Gambar 2.2 Hasil Proses Inferensi Model Mamdani
2. Model Sugeno
Proses perhitungan tidak terlalu kompleks, waktu relatif cepat Cocok untuk sistem kontrol yang memerlukan respon cepat
Model Sugeno menggunakan fungsi keanggotaan yang lebih sederhana dibandingkan Model Mamdani. Fungsi keanggotaan tersebut adalah Singleton, yaitu fungsi keanggotaan yang memiliki derajat keanggotaan 1 pada suatu nilai crisp tunggal dan 0 pada semua nilai crisp yang lain. Misalkan fungsi Singleton untuk Durasi Penyiraman didefinisikan seperti gambar (2.3) berikut:
d. Defuzzifikasi
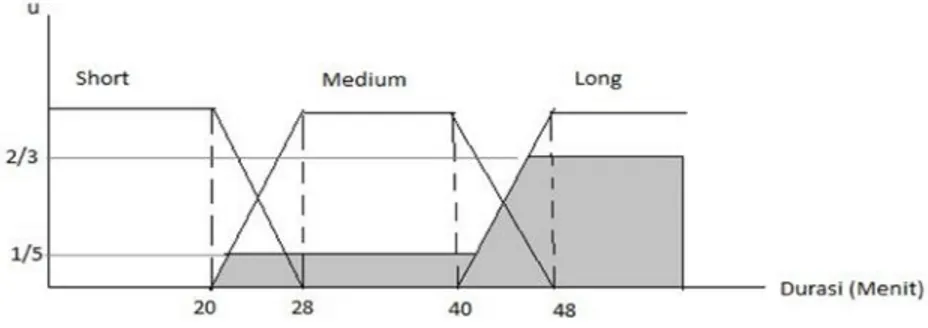
Defuzzifikasi mengubah fuzzy output menjadi nilai crisp output. Sebelum defuzzifikasi, harus dilakukan proses composition, yaitu agregasi hasil clipping dari semua aturan fuzzy sehingga didapatkan satu fuzzy set tunggal. Ada dua metode defuzzifikasi yang diterapkan yaitu center of area (COA) dan mean of maxima (MOM). Proses komposisi dengan model mamdani dari dua fuzzy set menghasilkan satu fuzzy set tunggal seperti terlihat pada gambar (2.4) berikut:
Gambar 2.4 Hasil Komposisi dengan model Mamdani
2.2.2 Kelebihan Logika Fuzzy
1. Konsep logika fuzzy mudah dimengerti. Konsep matematis yang mendasari penalaran fuzzy sangat sederhana dan mudah dimengerti.
2. Logika Fuzzy sangat fleksibel.
3. Logika fuzzy memiliki toleransi terhadap data-data yang tidak tepat.
4. Logika Fuzzy mampu memodelkan fungsi-fungsi non linearyang sangat kompleks. 5. Logika fuzzy dapat membangun dan mengaplikasikan pengalaman-pengalaman
para pakar secara langsung tanpa harus melalui proses pelatihan.
6. Logika Fuzzy dapat bekerjasama dengan teknik-teknik kendali secara konvensional.
2.3 Arduino Mega[3]
Arduino Mega2560 adalah papan mikrokontroler berbasiskan ATmega2560 (datasheet ATmega2560). Arduino Mega2560 memiliki 54 pin digital input/output, dimana 15 pin dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (port serial hardware), 16 MHz kristal osilator, koneksi USB, jack power, header ICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung mikrokontroler. Cukup dengan menghubungkannya ke komputer melalui kabel USB atau power dihubungkan dengan adaptor AC-DC atau baterai untuk mulai mengaktifkannya. Arduino Mega2560 kompatibel dengan sebagian besar shield yang dirancang untuk Arduino Duemilanove atau Arduino Diecimila. Arduino Mega2560 adalah versi terbaru yang menggantikan versi Arduino Mega.
Gambar 2.5 Arduino Mega
2.3.1 Daya (Power)
Arduino Mega dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Sumber daya eksternal (non-USB) dapat berasal baik dari adaptor AC-DC atau baterai. Adaptor dapat dihubungkan dengan mencolokkan steker 2,1 mm yang bagian tengahnya terminal positif ke ke jack sumber tegangan pada papan. Jika tegangan berasal dari baterai dapat langsung dihubungkan melalui header pin Gnd dan pin Vin dari konektor POWER.
Papan Arduino ATmega2560 dapat beroperasi dengan pasokan daya eksternal 6 Volt sampai 20 volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi tidak stabil. Jika sumber tegangan menggunakan lebih dari 12 Volt, regulator tegangan akan mengalami panas berlebihan dan bisa merusak papan. Rentang sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt.
Pin tegangan yang tersedia pada papan Arduino adalah sebagai berikut:
VIN : Adalah input tegangan untuk papan Arduino ketika menggunakan sumber daya eksternal (sebagai ‘saingan’ tegangan 5 Volt dari koneksi USB atau sumber daya ter-regulator lainnya). Anda dapat memberikan tegangan melalui pin ini, atau jika memasok tegangan untuk papan melalui jack power, kita bisa mengakses/mengambil tegangan melalui pin ini.
5V : Sebuah pin yang mengeluarkan tegangan ter-regulator 5 Volt, dari pin ini tegangan sudah diatur (ter-regulator) dari regulator yang tersedia (built-in) pada papan. Arduino dapat diaktifkan dengan sumber daya baik berasal dari jack power DC (7-12 Volt), konektor USB (5 Volt), atau pin VIN pada board (7-12 Volt). Memberikan tegangan melalui pin 5V atau 3.3V secara langsung tanpa melewati regulator dapat merusak papan Arduino.
3V3 : Sebuah pin yang menghasilkan tegangan 3,3 Volt. Tegangan ini dihasilkan oleh regulator yang terdapat pada papan (on-board). Arus maksimum yang dihasilkan adalah 50 mA.
GND : Pin Ground atau Massa.
IOREF : Pin ini pada papan Arduino berfungsi untuk memberikan referensi tegangan yang beroperasi pada mikrokontroler. Sebuah perisai (shield) dikonfigurasi dengan benar untuk dapat membaca pin tegangan IOREF dan memilih sumber daya yang tepat atau mengaktifkan penerjemah tegangan (voltage translator) pada output untuk bekerja pada tegangan 5 Volt atau 3,3 Volt.
2.3.2 Memori
Arduino ATmega2560 memiliki 256 KB flash memory untuk menyimpan kode (yang 8 KB digunakan untuk bootloader), 8 KB SRAM dan 4 KB EEPROM (yang dapat dibaca dan ditulis dengan perpustakaan EEPROM).
2.3.3 Input dan Output
Masing-masing dari 54 digital pin pada Arduino Mega dapat digunakan sebagai input atau output, menggunakan fungsi pinMode() , digitalWrite() , dan digitalRead(). Arduino Mega beroperasi pada tegangan 5 volt. Setiap pin dapat memberikan atau menerima arus maksimum 40 mA dan memiliki resistor pull-up internal (yang terputus secara default) sebesar 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus, antara lain:
Serial : 0 (RX) dan 1 (TX); Serial 1 : 19 (RX) dan 18 (TX); Serial 2 : 17 (RX) dan 16 (TX); Serial 3 : 15 (RX) dan 14 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data serial TTL. Pins 0 dan 1 juga terhubung ke pin chip ATmega16U2 Serial USB-to-TTL.
Eksternal Interupsi : Pin 2 (interrupt 0), pin 3 (interrupt 1), pin 18 (interrupt 5), pin 19 (interrupt 4), pin 20 (interrupt 3), dan pin 21 (interrupt 2). Pin ini dapat dikonfigurasi untuk memicu sebuah interupsi pada nilai yang rendah, meningkat atau menurun, atau perubah nilai.
SPI : Pin 50 (MISO), pin 51 (MOSI), pin 52 (SCK), pin 53 (SS). Pin ini mendukung komunikasi SPI menggunakan perpustakaan SPI. Pin SPI juga terhubung dengan header ICSP, yang secara fisik kompatibel dengan Arduino Uno, Arduino Duemilanove dan Arduino Diecimila.
LED : Pin 13. Tersedia secara built-in pada papan Arduino ATmega2560. LED terhubung ke pin digital 13. Ketika pin diset bernilai HIGH, maka LED menyala (ON), dan ketika pin diset bernilai LOW, maka LED padam (OFF).
TWI : Pin 20 (SDA) dan pin 21 (SCL). Yang mendukung komunikasi TWI menggunakan perpustakaan Wire. Perhatikan bahwa pin ini tidak di lokasi yang sama dengan pin TWI pada Arduino Duemilanove atau Arduino Diecimila.
Arduino Mega2560 memiliki 16 pin sebagai analog input, yang masing-masing menyediakan resolusi 10 bit (yaitu 1024 nilai yang berbeda). Secara default pin ini dapat diukur/diatur dari mulai Ground sampai dengan 5 Volt, juga memungkinkan untuk mengubah titik jangkauan tertinggi atau terendah mereka menggunakan pin AREF dan fungsi analogReference().
Ada beberapa pin lainnya yang tersedia, antara lain:
AREF : Referensi tegangan untuk input analog. Digunakan dengan fungsi analogReference().
RESET : Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang) mikrokontroler. Jalur ini biasanya digunakan untuk menambahkan tombol reset pada shield yang menghalangi papan utama Arduino.
2.3.4 Komunikasi
Arduino Mega2560 memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, dengan Arduino lain, atau dengan mikrokontroler lainnya. Arduino ATmega328 menyediakan 4 hardware komunikasi serial UART TTL (5 Volt). Sebuah chip
ATmega16U2 (ATmega8U2 pada papan Revisi 1 dan Revisi 2) yang terdapat pada papan digunakan sebagai media komunikasi serial melalui USB dan muncul sebagai COM Port Virtual (pada Device komputer) untuk berkomunikasi dengan perangkat lunak pada komputer, untuk sistem operasi Windows masih tetap memerlukan file inf, tetapi untuk sistem operasi OS X dan Linux akan mengenali papan sebagai port COM secara otomatis. Perangkat lunak Arduino termasuk didalamnya serial monitor memungkinkan data tekstual sederhana dikirim ke dan dari papan Arduino. LED RX dan TX yang tersedia pada papan akan berkedip ketika data sedang dikirim atau diterima melalui chip USB-to-serial yang terhubung melalui USB komputer (tetapi tidak untuk komunikasi serial seperti pada pin 0 dan 1).
Sebuah perpustakaan SoftwareSerial memungkinkan untuk komunikasi serial pada salah satu pin digital Mega2560. ATmega2560 juga mendukung komunikasi TWI dan SPI. Perangkat lunak Arduino termasuk perpustakaan Wire digunakan untuk menyederhanakan penggunaan bus TWI. Untuk komunikasi SPI, menggunakan perpustakaan SPI.
2.3.5 Programming
Arduino Mega dapat diprogram dengan software Arduino (Unduh perangkat lunak Arduino). ATmega2560 pada Arduino Mega sudah tersedia preburned dengan bootloader yang memungkinkan Anda untuk meng-upload kode baru tanpa menggunakan programmer hardware eksternal. Hal ini karena komunikasi yang terjadi menggunakan protokol asli STK500. Anda juga dapat melewati (bypass) bootloader dan program mikrokontroler melalui pin header ICSP (In-Circuit Serial Programming).
Chip ATmega16U2 (atau 8U2 pada board Rev. 1 dan Rev. 2) source code firmware tersedia pada repositori Arduino. ATmega16U2/8U2 dapat dimuat dengan bootloader DFU, yang dapat diaktifkan melalui:
Pada papan Revisi 1 : Menghubungkan jumper solder di bagian belakang papan (dekat dengan peta Italia) dan kemudian akan me-reset 8U2.
Pada papan Revisi 2 : Ada resistor yang menghubungkan jalur HWB 8U2/16U2 ke ground, sehingga lebih mudah untuk dimasukkan ke dalam mode DFU.
Kemudian Anda dapat menggunakan Atmel FLIP software (sistem operasi Windows) atau DFU programmer (sistem operasi Mac OS X dan Linux) untuk memuat firmware baru. Atau Anda dapat menggunakan pin header ISP dengan programmer eksternal (overwrite DFU bootloader).
2.3.6 Reset Otomatis (Software)
Daripada menekan tombol reset sebelum upload, Arduino Mega2560 didesain dengan cara yang memungkinkan Anda untuk me-reset melalui perangkat lunak yang berjalan pada komputer yang terhubung. Salah satu jalur kontrol hardware (DTR) mengalir dari ATmega8U2/16U2 dan terhubung ke jalur reset dari ATmega2560 melalui kapasitor 100 nanofarad. Bila jalur ini di-set rendah/low, jalur reset drop cukup lama untuk me-reset chip. Perangkat lunak Arduino menggunakan kemampuan ini untuk memungkinkan Anda meng-upload kode dengan hanya menekan tombol upload pada perangkat lunak Arduino. Ini berarti bahwa bootloader memiliki rentang waktu yang lebih pendek, seperti menurunkan DTR dapat terkoordinasi (berjalan beriringan) dengan dimulainya upload.
Pengaturan ini juga memiliki implikasi lain. Ketika Mega2560 terhubung dengan komputer yang menggunakan sistem operasi Mac OS X atau Linux, papan Arduino akan di-reset setiap kali dihubungkan dengan software komputer (melalui USB). Dan setengah detik kemudian atau lebih, bootloader berjalan pada papan Mega2560. Proses reset melalui program ini digunakan untuk mengabaikan data yang cacat (yaitu apapun selain meng-upload kode baru), ia akan memotong dan membuang beberapa byte pertama dari data yang dikirim ke papan setelah sambungan dibuka. Jika sebuah sketsa dijalankan pada papan untuk menerima satu kali konfigurasi atau menerima data lain ketika pertama kali dijalankan, pastikan bahwa perangkat lunak diberikan waktu untuk berkomunikasi dengan menunggu satu detik setelah terkoneksi dan sebelum mengirim data.
Mega2560 memiliki trek jalur yang dapat dipotong untuk menonaktifkan fungsi auto-reset. Pad di kedua sisi jalur dapat hubungkan dengan disolder untuk mengaktifkan kembali fungsi auto-reset. Pad berlabel “RESET-EN”. Anda juga dapat menonaktifkan auto-reset dengan menghubungkan resistor 110 ohm dari 5V ke jalur reset.
2.3.7 Proteksi Aruslebih USB
Arduino Mega2560 memiliki polyfuse reset yang melindungi port USB komputer Anda dari hubungan singkat dan arus lebih. Meskipun pada dasarnya komputer telah memiliki perlindungan internal pada port USB mereka sendiri, sekring memberikan lapisan perlindungan tambahan. Jika arus lebih dari 500 mA dihubungkan ke port USB, sekring secara otomatis akan memutuskan sambungan sampai hubungan singkat atau overload dihapus/dibuang.