BAB II
LANDASAN TEORI
II.1. Teori Pengukuran Level
Maksud dari pengukuran level adalah untuk mengetahui volume atau berat dari suatu cairan yang ada didalam tangki tersebut. Ada dua cara utama untuk mengukur tinggi permukaan cairan, yaitu :
a. Pengukuran langsung b. Pengukuran tidak langsung
Selain itu untuk menentukan tinggi permukaan cairan dapat juga dipergunakan cara :
a. Listrik b. Isotop
c. Ultrasonik dll.
Adapun yang dimaksud dengan pengukuran secara langsung adalah untuk dapat mengetahui level dari objek yang akan diukur, kita harus berada dekat dengan objek yang akan diukur selain itu alat ukur yang digunakan harus kontak langsung dengan objek yang akan diukur. Sebagai contoh : Gelas penunjuk dan pelampung. Dan yang dimaksudkan dengan pengukuran tidak langsung yaitu kebalikan dari pengukuran secara langsung, disini untuk mengetahui tinggi level objek yang akan diukur alat ukur tidak kontak langsung dengan objek yang akan diukur tetapi mengunakan media perantara untuk mengetahui level objek yang akan diukur.
Contoh dari pengukuran tidak langsung adalah sistem gelembung udara, sistem kotak difragma, sistem jebakan udara, manometer pipa U.
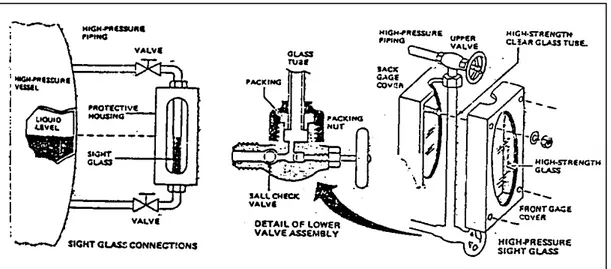
II.2. Alat – Alat Ukur Level II.2.1 Gelas Penunjuk
Pada Gambar 2.1 menunjukkan penggunaan gelas penunjuk pada pengukuran level. Dimana gelas penunjuk ini berhubungan dengan cairan didalam tangki dan diletakkan disamping tangki yang berisi cairan. Menurut hukum bejana berhubungan, tinggi tangki dan gelas penunjuk selalu sama. Untuk dapat melihat tinggi permukaan ini, cairan yang akan diukur harus bening tidak boleh keruh karena akan mengganggu penglihatan pada gelas penunjuk. Yang sangat dihindari dari pengggunaan alat ukur ini adalah apabila gelas penunjuk ini pecah maka air dalam tangki akan tumpah keluar. Selain itu biasanya batas ukurnya hanya sampai kira – kira satu meter.
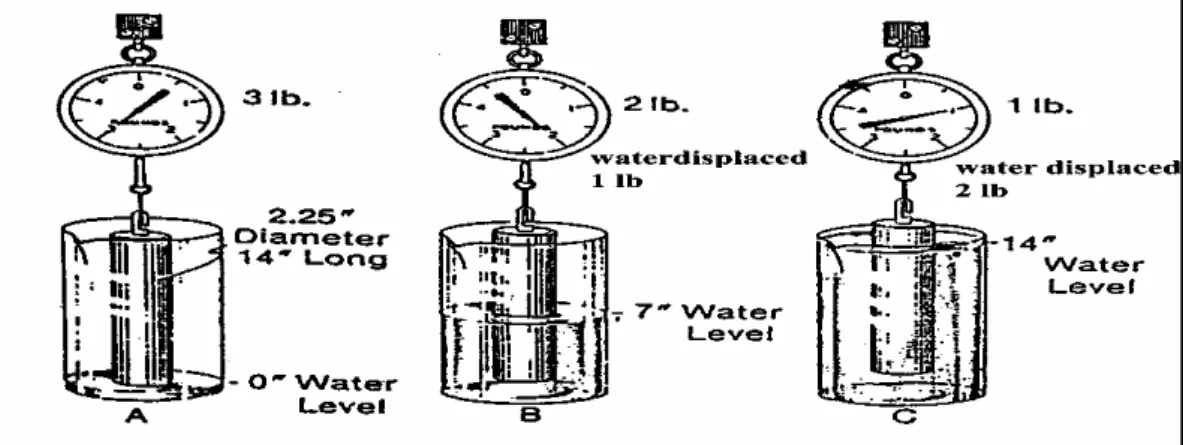
II.2.2 Pelampung
Seperti pada Gambar 2.2 penggunaan pelampung merupakan salah satu cara dari pengukuran level cairan. Disini pelampung yang ringan selalu bergerak mengikuti permukaan cairan. Karena adanya berat maka katrol berputar menggerakkan jarum penunjuk. Dengan kalibrasi maka tentunya angka – angka pada skala merupakan tinggi cairan atau sudah langsung menunjukkan volume atau massa dari cairan tersebut. Ada banyak cara pengukuran dengan pelampung, tetapi pada dasarnya mempunyai prinsip – prinsip yang sama, yaitu gerakan permukaan diikuti dengan gerakan pelampung. Yang selanjutnya dihubungkan pada jarum berskala. Hubungan antara jarum penunjuk dan pelampung bisa berupa tali, kawat dengan katrol atau batang kaku dengan suatu engsel. Dengan menggunakan pelampung daerah kerja dapat diperbesar (lebih dari satu meter). Skala pembacaan dapat ditaruh pada tempat tinggi atau rendah, atau terpisah dari tangki cairan. Untuk memperoleh ketelitian yang baik, pelampung harus tercelup sampai batas penampang yang terbesar.
II. 3. Teori Level Radar Transmitter II.3.1 Radar
Beberapa pencipta, ilmuwan, dan insinyur mendukung pengembangan dari radar. Untuk yang pertama menggunakan Gelombang radio untuk mendeteksi kehadiran dari object metalik jauh melaui gelombang radio adalah Cristian Hulsmeyer, April 1904, mendeteksi kehadiran dari suatu kapal di kabut yang tebal/ padat. Ia menerima Reichspatent Nr. 165546 untuk alat radar sebelumnya, dan mendapat paten 169154 di 11 November untuk perkembangannya. Ia juga menerima suatu hak paten ( GB13170) di Inggris untuk telemobiloscopenya pada 22 September 1904. Nikola Tesla, pada Agustus 1917, lebih dulu untuk pemapaman prinsip tingkatan power dan frekuensi dari unit radar.
Radar adalah suatu sistem yang menggunakan gelombang elektromagnetik
untuk mengidentifikasi objek yang ditetapkan, beberapa cakupan yaitu ketinggian, arah, atau kecepatan objek yang bergerak seperti pesawat terbang, kapal, kendaraan bermotor, formasi cuaca, dll. Dimana gelombang yang di pancarkan ke objek melaui antena, akan direfleksikan kembali oleh objek ke radar melalui antena. Dan diproses oleh sistem radar hingga objek tersebut dapat dideteksi.
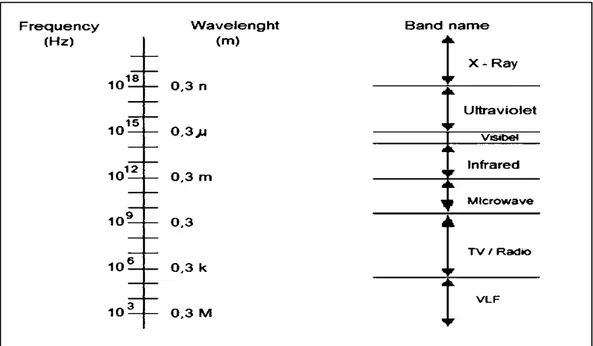
Berdasarkan panjang gelombang dan frekuensi gelombang elektromagnetik, maka gelombang tersebut dapat dikelompokkan menjadi beberapa kelompok. Seperti pada Gambar 2.3 yang menunjukkan spectrum radiasi elektromagnetik. Kecepatan dari pekembangan pancaran gelombang elektromagnetik yang menyebar melalui suatu ruang vacum pada suatu kecepatan yang tetap, dan tidak terikat pada frekuensi dan panjang gelombang.
Dalam hal ini, kecepatan dapat dihitung dengan menggunakan rumus berikut ini :
C = λ . f ……… (1)
Dimana : C = Kecepatan cahaya (2,998x 108m/s ≈ 3x 108m/s)λ = Panjang gelombang (meter) f = Frekuensi dalam hertz (Hz) atau (s-1)
Gambar 2.3 Spectrum Gelombang Elektromagnetik
Sinyal radar beroperasi pada gelombang 3 MHz – 110 GHz dengan panjang gelombang 10 m – 4 mm. Hal ini dapat dilihat pada tabel 2.1 yaitu yang menunjukkan pengelompokan gelombang radar berdasar frekuensi dan aplikasinya. Frekuensi pulsa radar yang dibentuk, dan luas dari antenna ditentukan oleh objek apa yang akan diamati. Refleksi gelombang elektromagnetik menyebar pada konstanta
dielektrik atau diamagnetik yang tetap. Ini berarti bahwa pada umumnya gelombang radio dari radar ke suatu objek yang padat di udara atau suatu ruang hampa, atau perubahan lain pada konsentrasi atomis antara suatu obyek dan apa melingkupinya. Dasar pengukuran radar terhadap jarak dari suatu objek dapat
dilihat pada rumus berikut :
2 T . C D ……… (2) Dimana : D = Jarak dari objek yang terdeteksi oleh radar (m)
T = Time of flight/ waktu penerbangan dari sinyal yang dipancarkan kepada sinyal hasil (s)
C = Kecepatan cahaya (3 × 108 m/s)
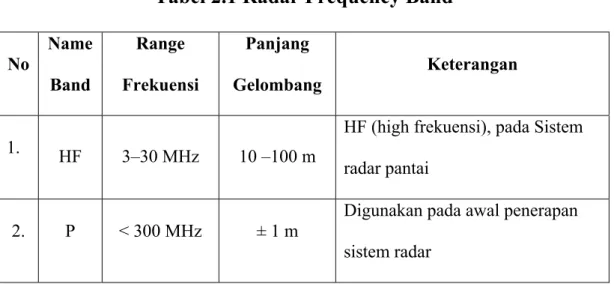
Berdasarkan frekuensinya radar dapat dibagi pada beberapa kelompok frekuensi, dan masing – masing mempunyai panjang gelombang yang berbeda dan aplikasi yang berbeda. Hal ini dapat dilihat pada Tabel 2.1 radar frekuensi band berikut.
Tabel 2.1 Radar Frequency Band
No Name Band Range Frekuensi Panjang Gelombang Keterangan 1. HF 3–30 MHz 10 –100 m
HF (high frekuensi), pada Sistem radar pantai
2. P < 300 MHz ± 1 m Digunakan pada awal penerapan sistem radar
3. VHF 50 –330 MHz 0.9-6 m Frekwensi yang sangat tinggi.
4. UHF 300 –1000 MHz
0.3 - 1 m
Digunakan pada peringatan awal pada sistem balistik dari suatu missil.
5. L 1–2 GHz 15–30 cm
Panjang batasan kontrol pada lalu lintas udara dan pengawasan.
6. S 2 – 4 GHz 7.5 – 15 cm
Untuk control terminal lalu lintas udara, panjang batasan dari pengamatan cuaca, radar angkatan laut, (S yang berarti short).
7. C 4 – 8 GHz 3.75-7.5 cm
Berada diantara X dan S band, untuk sistem pengamatan cuaca, Satelit transponders.
8. X 8 –12 GHz 2.5-3.75 cm
Pemanduan missil, radar angkatan laut, cuaca, pengawasan landasan, pemetaan resolusi-medium, pelabuhan udara. Yang dinamai X band sebab frekwensi adalah suatu rahasia selama perang dunia ke 2.
9. Ku 12–18 GHz 1.67-2.5 cm
Pemetaan resolusi-tinggi, pengukuran tinggi satelit,
10. K 18–27 GHz 1.11-1.67 cm
Dari kurz Jerman,yang berarti pendek, penggunaan yang terbatas dan berkaitan dengan penyerapan uap air, mendeteksi awan pada bidang meteorologi, mendeteksi pengendara motor melampaui batas kecepatan. radar meriam.
11. Ka 27– 40 GHz 0.75 -1.11 cm
Batasan yang pendek, pengawasan pelabuhan udara, frekwensi sedikit di atas K band (karenanya 'a') untuk radar photo, trigger kamera agar mengambil gambar dari plat lisensi dari kendaraan yang melewati lampu merah.
12. mm 40 –300 GHz 7.5 mm - 1mm
Millimeter band dibagi lagi atas beberapa band frekuensi seperti Untuk mendesain suatu surat yang nampak acak, dan frekwensi bergantung pada ukuran dari panduan gelombangnya.
13. Q 40 – 60 GHz
7.5 mm – 5mm
Digunakan untuk komunikasi militer.
14. V 50–75 GHz 6.0 – 4 mm
Gelombang yang sangat kuat diserap oleh atmosfir.
15. W 60 –110 GHz 2.7 - 4.0 mm
Digunakan sebagai suatu sensor yang visual untuk sarana (angkut) bersifat percobaan yang otonomi, pengamatan pada resolusi-tinggi untuk pengamatan cuaca, dan imaging.
II.3.2 Level Radar Transmitter Micropilot M FMR 240 (Endress Hauser)
Micropilot M FMR 240 adalah satu dari beberapa tipe dari Level Radar Transmitter yang diproduksi oleh Endress Hauser Company, contoh alat tersebut
dapat dilihat pada Gambar 2.4. Level Radar Transmitter menggunakan metode pengukuran level secara tidak langsung yaitu peralatan tidak berhubungan langsung dengan objek yang akan diukur tetapi dengan menggunakan gelombang mikro sebagai perantaranya. Pengukuran dengan Level Radar Transmitter tersebut berbeda dengan pengukuran menggunakan gelombang ultrasonik. Sebab gelombang mikro tidak memerlukan medium pengangkut apapun.
Micropilot M adalah suatu pemancar tingkat radar yang ringkas untuk pengukuran
secara kontinu, pengukuran yang dilakukan tanpa berhubungan langsung dengan objek yang akan diukur, Pengukuran tidaklah terpengaruh dengan perubahan media, dan temperatur yang berubah – ubah. Yang dimaksud dengan micropilot adalah suatu peralatan dilengkapi dengan penindas gema yang
disebabkan gangguan dari luar maupun yang disebabkan manusia pada saat pemasangan peralatan.
Gambar 2.4 Micropilot M FMR240
Pada teknologi pengukuran radar berdasarkan pada pengukuran time of
flight (waktunya dari penerbangan sinyal yang dipancarkan kepada sinyal hasil).
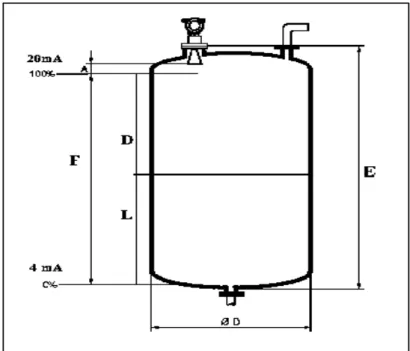
Dari waktu dan jarak yang ditentukan. Bila suatu sinyal menjangkau suatu titik sepanjang gelombang dimana terjadi perubahan dari tetapan dielektrik ketika sinyal menjangkau titik tersebut, pada umumnya sebagian dari isyarat ini dicerminkan pada permukan media. Jumlah cerminan/ pemantulan sinyal dari media sebanding pada perbedaan tetapan dielektrik antara panduan gelombang dan media. Untuk menentukan level pada suatu tangki dapat dilihat pada pada Gambar 2.5 berikut, dimana Jarak permukaan produk ke referensi point dari pengukuran (D) sebanding dengan waktu (t) dari penerbangan impuls sinyal. Dan level dari produk (L) merupakan pengurangan dari empty calibration (E) terhadap Jarak permukaan produk ke referensi point dari pengukuran (D).
Gambar 2.5 Pengukuran level pada tangki
Hal ini dapat dilihat pada rumus berikut ini :
L = E – D
Dimana D diperoleh dari :
2
T
.
C
D
Dimana : L = Level dari produk atau cairan (m). E = Empty calibration (m).
F = Jarak pengukuran penuh (m).
D = Jarak permukaan produk ke referensi point dari pengukuran (m) A = Jarak aman untuk Micropilot M FMR 240 minimal 50 mm dari jarak pengukuran penuh ke corong antenna, agar tidak
menimbulkan korosi pada antenna. C = Kecepatan cahaya (3 × 108 m/s).
T = Time of flight/ waktu penerbangan dari sinyal yang dipancarkan kepada sinyal hasil (s).
Alat ini beroperasi pada frekwensi sekitar 26 GHz dengan panjang gelombang ± 0,0115 m, pancaran pulsa energi maksimum dari 1mW (dengan keluaran daya merata 1 µW), kelompok gelombang radarnya yang digunakan pada K – band. Untuk dapat beroperasi Micropilot M (FMR240) harus disuplai dengan tegangan 24 Volt DC, output keluaran pada terminal 4 mA – 20 mA.FMR 240 yang kecil (1½") antena corong adalah idealnya cocok untuk vessel yang kecil. Pada alat ini terdiri atas dua bagian besar yaitu:
1. Antena yang berbentuk corong.
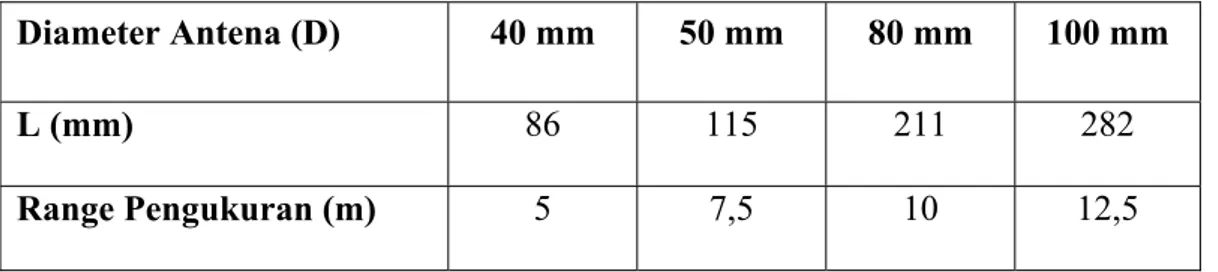
2. LCD yang berupa tampilan digital yang terdapat pada housing display. Untuk FMR 240 memiliki beberapa ukuran antenna yang dapat digunakan hal ini dapat dilihat pada Tabel 2.2 dibawah ini.
Tabel 2.2 Ukuran antena pada FMR 240
Diameter Antena (D) 40 mm 50 mm 80 mm 100 mm
L (mm) 86 115 211 282
Range Pengukuran (m) 5 7,5 10 12,5
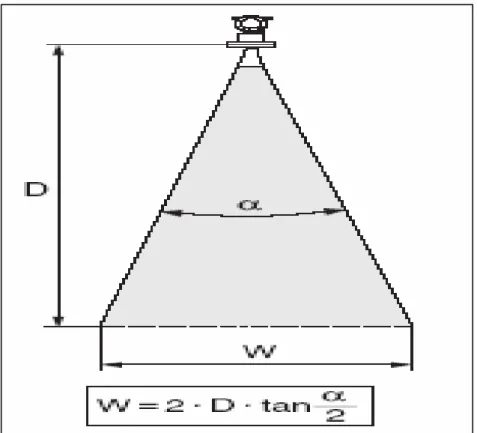
Adapun panjang antenna tergantung pada batas pengukurannya semakin besar antenna maka semakin besar jarak dan sudut gelombang yang dibentuk pada saat pengukuran sedang berlangsung. Beam angel (sudut pencerminan) yang
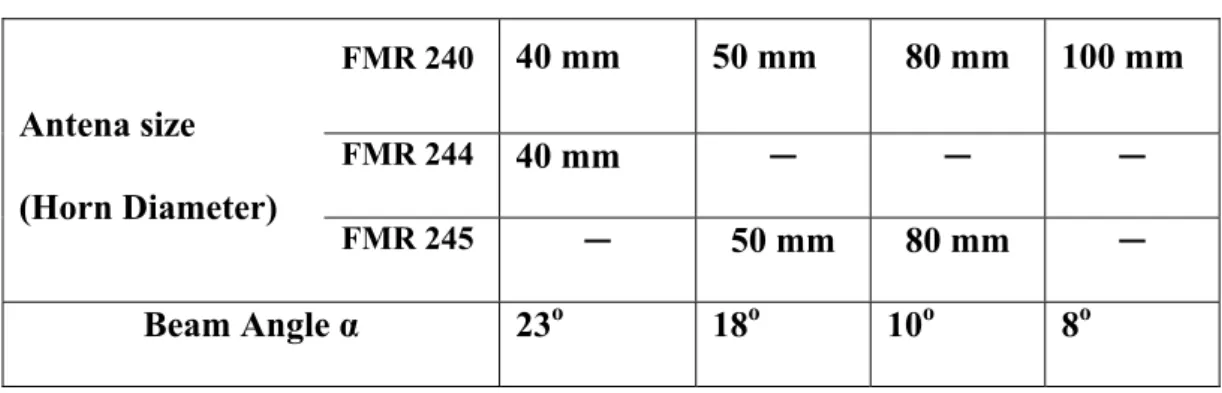
dibentuk gelombang mikro pada pengukuran, di mana rapat energi dari jangkauan gelombang radar separuh nilai dari rapat energi maksimum (3dB). Gelombang mikro yang dipancarkan pada antenna tidak dapat dicerminkan/ dipantulkan jika betentangan dengan dengan instalasinya. Garis tengah W (beam diameter) yang terbentuk dari pancaran gelombang kepermukaan produk ditentukan oleh diameter antena dan sudut yang dibentuk gelombang tersebut, hal ini dapat dilihat pada Gambar 2.6 dan Tabel 2.3 berikut ini.
Tabel 2.3 Beam Angel FMR 240 40 mm 50 mm 80 mm 100 mm FMR 244 40 mm ─ ─ ─ Antena size (Horn Diameter) FMR 245 ─ 50 mm 80 mm ─ Beam Angle α 23o 18o 10o 8o
Selain itu Micropilot M FMR 240 mempunyai konektivitas yang umum atau dapat terhubung dengan beberapa jenis alat seperti PLC, atau alat – alat control lainnya hal ini ditunjukkan pada Gambar 2.7. Selain itu untuk mendeteksi kerusakan atau melakukan perawatan dapat dilihat dengan komputer yang telah terinstal TOF Tools Software .
II.3.3 Transmitter
Transmitter merupakan salah satu bagian penting dari proses
pengontrolan. Transmitter dapat didefinisikan sebagai suatu alat yang berfungsi untuk mengirimkan sinyal proses yang berasal dari alat pendeteksi (sensor) ke bagian pengendali, yang mana sebelumnya sinyal proses tersebut diubah ke bentuk sinyal pneumatik atau sinyal elektrik, sesuai dengan jenis transmitter itu sendiri.
Karena input sinyal kontroler pada umumnya adalah berupa sinyal pneumatik dan sinyal elektrik. Maka transmitter dapat dibedakan atas :
1. Transmitter Pneumatik
Pada sistem ini sinyal proses diubah menjadi sinyal pneumatik yang berupa udara instrument dengan tekanan 3 psi sampai dengan 15 psi. sebagai salah satu contoh dari transmitter ini adalah Force Balancing
Transmitter (transmitter gaya seimbang) tipe pneumatik yang dapat
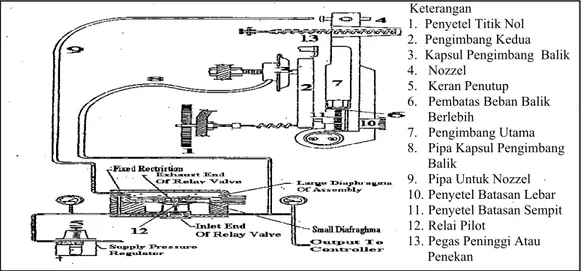
dilihat pada Gambar 2.8 dibawah ini.
Keterangan
1. Penyetel Titik Nol 2. Pengimbang Kedua 3. Kapsul Pengimbang Balik 4. Nozzel
5. Keran Penutup 6. Pembatas Beban Balik Berlebih
7. Pengimbang Utama
8. Pipa Kapsul Pengimbang Balik
9. Pipa Untuk Nozzel 10. Penyetel Batasan Lebar 11. Penyetel Batasan Sempit 12. Relai Pilot
13. Pegas Peninggi Atau Penekan
Dimana pergerakan dari batang pemuntir menghasilkan pergerakan maju mundur pada pengimbang utama. Pergerakan ini akan mengubah kedudukan pembalik sehingga menjauhi nozzle, bila menjauhi nozzle maka tekanan balik udara penggerak diafragma besar pada relai pilot akan berkurang dari sebelumnya dan begitu pula sebaliknya. Berubahnya tekanan tekanan balik tersebut akan akan mengubah kedudukan kerangan pilot pada relai untuk membuka atau menutup. Bila kerangan pilot membuka maka tegangan udara instrument output bertambah dan begitu juga bila terjadi sebaliknya. Udara instrument output juga dikirimkan ke kapsul pengimbang balik. Tekanan udara instrumen output akan terus bertambah atau berkurang sampai pengimbang mendapat gaya balas yang sama besar dari kapsul pengimbang balik melaui pengimbang utama. Sekali gaya pengimbang utama sama dengan pengimbang kedua maka tekanan udara instrumen output tidak berubah lagi.
2. Transmitter elektrik
Pada transmitter elektrik sinyal proses diubah menjadi besaran elektrik berupa arus 4 mA – 20 mA. Sebagai salah satu contoh dari transmitter elektrik ini dapat kita lihat pada Gambar 2.9 berikut ini menunjukkan
Keterangan :
1. Pengimbang Utama 2. Pegas Peninggi Dan
Pegas Titik Nol 3. Peredam 4. Penyetel Batasan 5. Pengimbang Kedua 6. Pembatas Langkah 7. Kesatuan Magnet 8. Pegas Biaas 9. Detektor
10. Kesatuan Detektor Daya Osilator
11. Penunjuk Output
Gambar 2.9 Force Balancing Transmitter Tipe Elektrik.
Batang pemuntir dari detektor (bagian perasa) disambungkan dengan pengimbang utama dari bagian pengirim, sehingga pergerakan dari batang pemuntir menghasilkan pergerakan pada pengimbang utama. Pergerakan dari pengimbang utama mengubah jarak antara kedua ferrite dari detektor bagian pengirim. Berubahnya jarak antara kedua ferrite menghasilkan perubahan pada induktansi dari pick-up coil. Perubahan induktansi pick-up coil menghasilkan perubahan pada output osilator dari kesatuan OPD (oscillator power detector). Perubahan pada output osilator menghasilkan perubahan nilai arus listrik yang keluar dari transmitter. Dengan demikian, perubahan pada variabel proses yang dirasakan oleh
detektor dapat menghasilkan perubahan pada nilai arus listrik yang keluar
dari bagian pengirim. Dengan demikian akan dihasilkan kedudukan dimana perubahan jarak antara kedua ferrite akan sebanding dengan perubahan variabel proses yang dirasakan detektor.
II.3.4 Alat – Alat Pendukung Pengontrolan
1. Digital Indicating Controller (Yokogawa UT-351)
a. Defenisi Digital Indicating Controller (Yokogawa UT – 351)
Digital Indicating kontroller (Yokogawa UT- 351) merupakan suatu alat
control yang dilengkapi dengan indikator yang berupa tampilan digital. Disini terdapat tampilan berupa PV (Proces Value) dan tampilan setpoint. Alat ini juga dilengkapi dengan pembacaan yang cukup luas, input dan output yang yang
universal serta dapat memantau sistem operasi utama dengan Auto/ Manual switch
yang terdapat pada sisi depan alat tersebut. Yang mana contoh alat tersebut dapat kita lihat pada Gambar 2.10 bawah ini.
Gambar 2.10 Digital Indicating Controller tipe UT – 351
Input dan output yang universal memungkinkan pengguna untuk mensetting UT-351 atau mengubah secara bebas jenis dari input masukan (termokopel, RTD, atau DC volt dll), range pengukuran, tipe dari output control (4 mA - 20 mA, pulsa tegangan atau relay contact), dari panel depan. Selain itu
parameter – parameter control UT- 351 dapat di atur dengan menggunakan komputer (PC) (peralatan pengaturan parameter (model LL100)). Selain itu tersedia pula komunikasi fungsi yang bervariasi, yaitu peralatan ini dapat berkomunikasi dengan PC (Personal Computer), PLC, dan peralatan control lainnya. Adapun fungsi operasi tombol pada panel depan UT – 351 yaitu :
1. Tombol dan berfungsi untuk menambahkan atau mengurangkan nilai dari set point dan variasi parameter.
2. Tombol SET/ ENT ( ) berfungsi untuk menggunakan data data yang telah disetting atau memilih satu dari berbagai parameter yang akan disetting.
3. Tombol A/M berfungsi untuk menswitch mode operasi auto atau manual.
b. Spesifikasi Peralatan
Penggunaan Digital Indicating Kontroller UT-351 pada pengontrolan level air pada tangki boiler batubara adalah untuk mengatur bukaan control valve sesuai dengan settingan kontrol yang dibutuhkan pada proses. Untuk itu diperlukan wiring yang sesuai dengan letak – letak dari terminal yang menjadi standart acuan untuk pemasangan peralatan ini. Kesalahan pada pemasangan dapat mengakibatkan peralatan tersebut tidak dapat berfungsi sesuai dengan settingan yang telah ditentukan, dan secara langsung dapat berakibat fatal pada pada jalannya proses pembangkit listrik. Disini DIC (Digital Indicating
Controller) UT – 351 memiliki 30 terminal wiring yang mana terdiri terminal
input dan output yang masing – masing memiliki fungsi masing – masing, tergantung pada sensor, transmitter yang digunakan pada proses. Untuk lebih
jelasnya dapat dilihat pada Gambar 2.11 berikut ini yang menunjukkan susunan dari terminal input dan output dari DIC UT – 351 tersebut.
27
Pada Gambar 2.11 terdapat gambar keterpasangan dari input sinyal terhubung dengan sensor atau transmitter 2 wire dengan power supply 24 V DC, yang menjadi input pada UT-351 seperti yang terlihat pada Gambar 2.12 berikut yang memperlihatkan keterpasangan dari UT-351 dengan peralatan sensor atau
transmitter 2 wire. Penempatan resistor 250 Ω antara input kontroller dan transmitter 2 wire adalah untuk mengkonversi suatu sinyal arus ke suatu sinyal
voltase pada PV input sinyal alat ini yang berupa input tegangan 1 sampai 5 V DC.
Gambar 2.12 Input Wiring Dari UT – 351
Input :
Input UT-351 : 220VAC Frekuensi : 50/ 60 Hz
Input sinyal : 4 mA – 20 mA (1 – 5 V DC) Konsumsi power : 20 VA
Humidity : 20 to 90% (kelembaban rata –rata).
Output control :
Output sinyal : 4 mA – 20 mA. Output accuracy : ±0,3 % dari span.
2. Control Valve ( Yamatake Top guide Single Seated Control Valve (Model HTS/ Yamatake – Honeywell )
a. Pengertian dan fungsi dari control valve
Control valve yang disebut juga katup pengatur adalah suatu katup yang
berfungsi untuk mengatur catu materi atau energi untuk suatu proses bukaan katup, melalui mana materi itu. Jadi kerangan control adalah orifice yang ditempatkan pada suatu pipa proses. Disini dapat dilihat bahwa bidang bukaan kerangan berubah – ubah sesuai dengan persen langkah kerangan sedangkan, sedangkan tekanan jatuh melalui kerangan berubah – ubah sesuai dengan kondisi hilir kerangan. Suatu kerangan ditentukan oleh proses yang bersangkutan, seperti keaadaan pipa, bejana dan peralatan lainnya dalam proses itu ditempatkan. Kapasitas melalui sebuah kerangan kontrol dinyatakan dengan kependekan Cv. Untuk cairan : Cv = Q. G/∆P
Untuk gas : Cv = G/1360 . Tf .G/∆P(P2) Untuk uap : Cv =G/63,3 .V/∆P
Dimana : Q atau W = laju aliran cairan (gpm), gas (scfh), uap(lb/h) G = berat jenis
Tf = Suhu aliran dalam derajat rankine P = Pressure drop dalam psi (P1 − P2)
P1 = Tekanan mutlak (psia) upstream kerangan P2 = tekanan mutlak (psia) downstream kerangan V = spesifikasi volume kerangan dalam kubik feet/lb
Kerangan kontrol terdiri atas dua bagian pokok :
a. Actuator (pengggerak)
Disini actuator dapat dibedakan pada beberapa tipe yaitu 1. Actuator tipe elektrik
Memerlukan input sinyal electrik (4 mA sampai 20 mA) agar dapat membuka kerangan.
2. Actuator tipe pneumatik
Memerlukan input sinyal pneumatik (udara dengan tekanan 3 psi sampai 15 psi) agar dapat membuka kerangan.
3. Actuator tipe hidrolik b. Badan kerangan (valve body)
Terdiri dari sumbat kerangan dan valve body. Dan berdasarkan aksi kerangannya dibedakan atas :
1. Air to Close (direct action)
Memerlukan aksi udara untuk menutup sumbat kerangan.
2. Air to Open (reverse action)
Dimana memerlukan aksi udara untuk membuka sumbat kerangan.
b. Electric Top Guide Single Seated Control Valve (Model HTS/ Yamatake – Honeywell).
Top Guide single seated control valve model HTS didesain untuk
perawatan yang mudah, dengan valve body yang ringkas, memiliki suatu S- shape alur aliran yang menandakan kerugian aliran yang rendah. Kapasitas aliran yang luas, dan karakteristik akurasi aliran tinggi. Ketahanan getar katup sumbat yang
tinggi, yang memiliki area peluncuran katup yang kecil. Contoh dari alat ini dapat kita lihat pada Gambar 2.13 yang memperlihatkan gambaran secara fisik dari
control valve model HTS Yamatake – Honeyweell.
Gambar 2.13 Control valve type HTS
Model HTS valve adalah suatu tipe control valve yang menggunakan
actuator tipe elektrik, input masukan yang diterima dari terminal input berupa
sinyal elektrik 4 mA sampai 20 mA atau 1 sampai 5 volt DC. Sinyal elektrik pada input masukan merupakan acuan dari bukaan katup pada control valve tersebut, dimana 4 mA sampai 20 mA sama dengan 0 % sampai 100% dari bukaan katup. Disamping itu untuk dapat beroperasi alat ini memerlukan tegangan sebesar 100 V AC. Seperti pada Gambar 2.14 yang merupakan terminal connection dari
Gambar 2.14 Terminal Conection Control Valve Model HTS
Specification
Model : HTS
Description : top guide single seated control valve Valve size : 2 inchi
Port or CV value : 1- ½ inchi (40 mm) Body rating : J I S 1O K
End conection : RF Body material : FC 200 Flow characteristic : %CF Bonnet type : Plain type Actuator : Electric Actuator
Valve action : Direct Action (air to close) Air supply : 2744 N/m2
Spring range : 784 – 2352 N/m2 Input signal : 4 mA – 20 mA DC
Operating condition
Flow rate maximum : 7000 Kg/ H
Flow rate normal : 4000Kg/ H, min 2000 Kg/H Pressure P1 : 1960 N/m2
Pressure P2 : 1666 N/m2 Cv selected : 24
Cv calculated : 8,5 Temperatur : 34 oC
II.3.6 Teori Kontrol
1. Manfaat Sistem Kontrol
Pada proses industri sering dibutuhkan besaran – besaran yang memerlukan kondisi atau persyaratan khusus seperti ketelitian yang tinggi, harga yang bervariasi dalam suatu rangkuman tertentu, perbandingan yang tetap antara variabel/ besaran, atau suatu besaran sebagai fungsi dari pada variabel, sehingga berada pada suatu harga atau dalam suatu batasan (range) harga tertentu. Ditinjau dari segi peralatan, sistem kontrol terdiri dari berbagai susunan komponen fisis yang digunakan untuk mengarahkan aliran energi ke suatu mesin atau proses agar dapat menghasilkan prestasi yang diinginkan. Tujuan dari pengontrolan adalah untuk mendapatkan optimisasi dimana hal ini dapat diperoleh berdasarkan fungsi daripada sistem kontrol itu sendiri, yaitu pengukuran, membandingkan, pencatatan perhitungan, dan perbaikan.
2. Pengelompokan Sistem Kontrol
Pengelomokan sistem control dapat dikelompokkan sebagai berikut : a. Dengan operator manual dan otomatik
Pengontrolan secara manual adalah pengontrolan yang dilakukan oleh manusia yang bertindak sebagai operatornya. Sedangkan pengontrolan secara otomatis adalah pengontrolan yang dilakukan oleh mesin/ peralatan yang bekerja secara otomatis dan operasinya dibawah pengawasan manusia.
b. Closed loop (jaringan tertutup) dan open loop (jaringan terbuka).
Open loop adalah sistem pengontrolan dimana besaran keluaran
dikontrol dapat dibandingkan terhadap harga yang diinginkan melalui alat pencatat atau recorder dan hasil dari pengontrolan tidak dikembalikan ke kontroler. Closed loop adalah hasil pengaturan besaran atau parameter yang akan dikembalikan ke kontroler sebagai umpan balik (feed back). c. Kontinu (analog)
Pengontrolan secara kontinu dapat dibedakan atas beberapa bagian diantaranya :
1. Kontroler aksi proportional
Aksi controller terhadap output kontroler adalah bias berbanding lurus atau berbanding terbalik, untuk sebagian kontroler, aksi proportional diatur melalui hasil sedangkan sebagian lagi diatur oleh
proportional band. Secara matematik dapat ditentukan dengan rumus :
Dimana : Mp = persen output controller PB = proportional band r = persen set point c = persen variable proses bias = persen dari span controller (r – c) = persen error atau penyimpangan
2. Kontroler aksi integral
Aksi integral disebut juga aksi reset , bila kontroler mengadakan perbaikan dengan membuka kembali kerangan, maka akan menutup kerangan dalam waktu sesaat dengan tujuan untuk menyamakan variabel proses dengan setpoint. Secara matematis dapat ditentukan dengan rumus :
Dimana : Mi = persen output controler integral PB = persen dari proportional band R = waktu reset
e = error (e – r)
dt = lamanya aksi reset berlangsung 3. Kontroller aksi derivative
Aksi ini disebut juga aksi rate (laju) karena aksi derivative mendahului perubahan pada masukan (variable proses) kontrol itu sendiri. Secara matematis dapat ditemtukan dengan rumus :
Dimana : P(t) = persen output controler derivative Kd = gain derivative
= laju perubahan error
4. Gabungan dari ketiga aksi kontoller tersebut yaitu P (proportional) + I (integral), P + D (derivative), atau gabungan dari ketiga aksi tersebut adalah P + I +D.
d. Diskrit (diskontinu)
Pengontrolan ini dapat dilakukan oleh komponen komponen diskrit dapat dibagi atas :
a. Pengontrolan dengan dua posisi (mis : relai, thermostat, level, sakelar On – Off , dll. Bersifat osilasi.
b. Posisi ganda misalnya saklar pemilih (selector switch)
c. Floating : pada posisi yang relatif tak terbatas. Dalam jenis ini pemindahan energi dapat dilakukan melalui salah satu dari beberapa kemungkinan yang ada.