PENERAPAN METODE BOX-JENKINS UNTUK MERAMALKAN
VOLUME LALU LINTAS
Wiwik Anggraeni
Jurusan Sistem Informasi
Fakultas Teknologi Informasi, Institut Teknologi Sepuluh November Surabaya Kampus ITS Sukolilo, Surabaya, 60111
E-mail : [email protected]
Abstrak
Teknik peramalan merupakan salah satu komponen yang penting dalam pengambilan keputusan karena bertujuan untuk memperkirakan nilai dari sebuah data di masa datang. Salah satu permasalahan dalam peramalan adalah memilih model terbaik untuk menyelesaikannya. Kurangnya data relevan bisa menjadi salah satu penyebab buruknya performansi atau akurasi dari teknik peramalan yang digunakan. Analisa time series telah digunakan dalam studi transportasi untuk mengurangi ketergantungan pada model yang masih konvensional. Box Jenkins merupakan model paling umum dari pendekatan peramalan dan bedanya dengan model yang lain adalah dalam Box Jenkins tidak perlu pengasumsian, inisialisasi, pola yang jelas dan juga tidak terbatas pada pola spesifik.
Langkah pertama dalam metode Box-Jenkins yaitu melakukan identifikasi data dengan melakukan uji stasioner pada data. Untuk mengubah data tidak stasioner menjadi data stasioner dilakukan proses differencing. Kemudian dilakukan estimasi model untuk data yang telah stasioner. Setelah itu dilakukan diagnosa terhadap model estimasi dan apabila sudah terbukti white noise maka model dapat digunakan untuk meramal. Setelah itu residual hasil peramalan di cek apakah sudah berdistribusi normal, jika benar maka model estimasi sudah dikatakan layak.
Hasil perbandingan peramalan dan observasi pada jalur lalu lintas, membuktikan bahwa model ARIMA paling baik digunakan untuk peramalan jangka pendek seperti rata-rata perbulan dan rata-rata perminggu. Dari hasil yang didapat mengindikasikan bahwa teknik time series dapat digunakan untuk mengembangkan peramalan jangka pendek dengan keakuratan tinggi. Teknik yang diusulkan tidak dapat menghasilkan peramalan yang akurat untuk periode panjang seperti average annual daily traffic.
Kata kunci : Time Series, Box-Jenkins, ARIMA, Lalu Lintas
1. PENDAHULUAN
Perkembangan dewasa ini menunjukkan bahwa sejalan dengan semakin kompleksnya dunia usaha, maka kebutuhan untuk memahami masa depan yang didasarkan pada kerangka pikir yang rasional semakin berkembang pesat. Oleh karena itu, peramalan mempunyai posisi yang sangat strategis dalam proses administrasi usaha, terutama berkaitan dengan proses pengambilan keputusan (Box dkk, 1994; Makridakis & Wheelwright, 1999). Hal ini didukung oleh suatu kenyataan bahwa efektif atau tidaknya suatu keputusan pada umumnya tergantung pada beberapa faktor yang tidak dapat dilihat pada waktu keputusan itu diambil.
Sejalan dengan perkembangan teknik peramalan yang semakin canggih yang dibarengi oleh perkembangan penggunaan komputer, peramalan semakin memperoleh perhatian pada beberapa tahun terakhir ini. Titik perhatian utama adalah pada kesalahan-kesalahan yang sering terjadi secara inheren pada setiap teknik peramalan. Ramalan
tentang hasil pada masa datang jarang sekali tepat, oleh karena itu seorang peramal biasanya hanya mampu untuk mengurangi atau memperkecil tingkat kesalahan yang ada (Davis, 2002).
Ada dua hal pokok yang harus diperhatikan dalam proses pembuatan peramalan yang akurat dan
bermanfaat (Davis, 2002; Makridakis &
Wheelwright, 1999). Pertama adalah pengumpulan data yang relevan yang berupa informasi yang dapat menghasilkan peramalan yang akurat. Kedua adalah pemilihan teknik peramalan yang tepat yang akan memanfaatkan informasi data yang diperoleh seoptimal mungkin.
Salah satu permasalahan dalam peramalan adalah memilih model terbaik untuk menyelesaikannya . Kurangnya data relevan bisa menjadi salah satu penyebab buruknya performansi atau akurasi dari teknik peramalan yang digunakan (Davis, 2002; Kim, 2003; Lattin, 2003). Analisa time series telah
digunakan dalam studi transportasi untuk
mengurangi ketergantungan pada model yang masih konvensional. Model sederhana ini relatif lebih mudah untuk dikembangkan dan digunakan jika tersedia informasi atau data tentang masa lalu
)
)(
(
1, , 1j kk k k j k kjr
r
r
r
=
−−
− −dan dapat diasumsikan bahwa beberapa aspek pola masa lalu akan terus berlanjut dimasa mendatang. Kim (2003), dan Smith (2002) menggunakan sejumlah data yang tersedia untuk merencanakan transportasi yang dibatasi oleh waktu dan keuangan.
Box Jenkins merupakan model paling umum dari pendekatan peramalan dan bedanya dengan model yang lain adalah dalam Box Jenkins tidak perlu pengasumsian, inisialisasi, pola yang jelas dan juga tidak terbatas pada pola spesifik (Box dkk, 1994; Davis, 2002). Sabry dkk (2007) menggunakan metode Box Jenkins untuk meramalkan volume lalu lintas jangka pendek. Mereka menggunakan 5 (lima) data set untuk menguji model Box Jenkins dan akhirnya dapat disimpulkan bahwa model Box Jenkins dapat digunakan untuk meramalkan volume lalu lintas jangka pendek karena mempunyai tingkat akurasi yang bagus.
Penelitian ini menerapkan teknik Box Jenkins untuk memprediksi volume lalu lintas harian di jalur Tanta-Mansoura (station 9) pada jalurnya. Parameter diestimasi dengan menggunakan model
Autoregressive Integrated Moving Average
(ARIMA). Model diuji peramalannya baik dalam rata-rata harian per bulan, per minggu maupun per tahun dalam tahun 2003 dan dibandingkan hasilnya dengan data aktual pada tahun 2003.
2. METODE PERAMALAN 2.1 Tahapan Box-Jenkins
Untuk menggambarkan peramalan dengan
pendekatan Box-Jenkins, maka George Box dan Gwilyn Jenkins telah mengembangkan suatu diagram skema, dimana skema ini terbagi dalam tiga tahap, yaitu identifikasi, penaksiran dan pengujian, dan penerapan. Pada tahap pertama, suatu model tertentu dimasukkan sementara sebagai model yang dianggap cocok untuk keadaan yang teridentifikasi. Tahap kedua mencocokkan model tersebut dengan data historis yang tersedia dan melakukan pengecekan untuk menentukan apakah model tersebut sudah cukup tepat. Jika tidak tepat, maka kembali ke tahap pertama, namun jika sudah cukup tepat, maka tahap ketiga dilakukan, yaitu penyusunan ramalan untuk periode yang akan datang.
2.1.1 Identifikasi 2.1.1.1 Uji Stationeritas
Syarat penerapan model ARMA adalah bahwa data yang digunakan harus stasioner atau memiliki derajat integrasi = 0. Salah satu ciri bahwa data stasioner ialah dari data yang dihasilkan menunjukkan mean, varians dan struktur
autokorelasi yang konstan. Diberikan pengujian untuk melihat kestasioneran data, uji stasioneritas bisa dilakukan dengan menggunakan metode grafik, correlogram ataupun unit root test. Metode yang paling sering digunakan adalah dengan melihat correlogram dari autocorrelation function (ACF).
Autokorelasi adalah hubungan antara variabel dengan lag waktu satu atau lebih dengan variabel itu sendiri. Dengan melakukan analisa autokorelasi, pola dari suatu data runtut waktu dapat diketahui. Besarnya autokorelasi biasa disebut dengan koefisien autokorelasi, yang dapat diperoleh dengan persamaan :
∑
∑
= − = + − − − = n t t k n t t t k k Y Y Y Y Y Y r 1 2 1 ) ( ) )( ((1)
dimana: kr
= koefisien autokorelasi untuk lag waktu k;t
Y
= data dari series;Y
= rata-rata dari series;k t
Y
+ = data dengan k periode di depan.Selain autokorelasi dikenal pula autokorelasi parsial. Autokorelasi parsial digunakan untuk
mengukur keeratan antara
Y
tdanY
t−k apabilapengaruh dari lag waktu 1, 2, 3, …, k –1 dianggap
terpisah atau dihilangkan. Nilai koefisien
autokorelasi parsial dapat diperoleh dengan persamaan (2) dan (3) berikut:
(2) (3)
dimana:
k
r
= koefisien autokorelasi dengan lag kkj
r
= koefisien autokorelasi parsial untuk lag k,ketika efek dari lag yang berjumlah j telah dihilangkan, dengan nilai j memiliki nilai dari 1 sampai k – 1.
Fungsi autokorelasi (ACF) dan fungsi autokorelasi parsial (PACF) digunakan untuk identifikasi pada model ARIMA Box-Jenkins.
Selain itu, suatu data dapat melewati proses differencing. Differencing ialah salah satu cara untuk mengubah data non-stasioner ke dalam data stasioner. Uji differencing ini adalah dengan cara memplot data hasil pengurangan data sebelumnya dengan data awal, lalu dilihat apakah sudah
∑
∑
− = − − = − − − − = 1 1 , 1 1 1 , 1 ) )( ( 1 ) )( ( k j j j k k j j k j k k kk r r r r r rstasioner atau belum. Apabila belum menunjukkan hasil plot data yang sesuai, maka diberikan difference kedua kalinya (second difference), dan bila hasil yang diberikan belum sesuai juga, maka diberikan sebuah rumus Backshift Notation. Persamaan - persamaannya ditunjukkan sebagai berikut: 1 ' −
−
=
t t tY
Y
Y
(4) Dimana: tY '
= Data Stasioner tY
= Data Awal 1 − tY
= Data Sebelumnya2.1.1.2 Penentuan Orde ARMA
Orde ARMA biasa dinyatakan dalam bentuk berikut : ARMA (p,q) dimana p adalah autoregresif dan q adalah ordo moving average. Persamaan ARIMA dengan d = 0 (derajat integrasi level) adalah model ARMA. Model ARMA secara garis besar disusun atas dua model time series standar, model autoregressive (AR) dan model moving average (MA).
Model AR(p)
Secara umum model autoregressive akan berbentuk seperti berikut : t p t p t t t
Y
Y
Y
Y
=
φ
0+
φ
1 −1+
φ
2 −2+
...
+
φ
−+
ε
(5) dimana: tY
= Variabel yang diamati pada waktu tp t t
t
Y
Y
Y
−1,
−2,....,
− = Variabel yang diamati pada waktu t-1, t-2, …, t-p.p
φ
φ
φ
φ
0,
1,
2,...,
= Koefisien yang harus diestimasi.t
ε
= Kesalahan (Error) pada saat tModel MA (q)
Secara umum, model moving average akan berbentuk seperti berikut:
q t q t t t t Y =
µ
+ε
−ω
1ε
−1−ω
2ε
−2 −...−ω
ε
− (6) dimana: tY
= Variabel yang diamati pada waktu tµ
= Konstanta meanq
ω
ω
ω
1,
2,...,
= Koefisien yang diestimasit
ε
= Kesalahan (Error)q t
t−
ε
−ε
1,...,
= Kesalahan (Error) masa laluModel ARMA (p,q)
Model Autoregressive Moving Average (ARMA) merupakan paduan dari model autoregressive (AR) dengan model moving average (MA). Notasi yang biasa digunakan adalah ARMA(p, q), dimana p merupakan tingkat dari bagian autoregressive dan q merupakan tingkat dari bagian moving average. Dengan integrasi data pada level, maka model ARMA akan berbentuk seperti berikut:
q t q t t t p t p t t t Y Y Y Y=φ0+φ1 −1+φ2 −2+...+φ − +ε −ω1ε−1−ω2ε−2−...−ωε− (7) 2.1.2 Estimasi
Penaksiran (estimasi) parameter model ditujukan untuk mendapatkan nilai-nilai parameter yang meminimumkan jumlah kuadrat nilai sisa atau sum
of squared residuals (SSR).
2.1.2.1 Penaksiran Parameter Model AR(1)
Model AR(1) dapat dituliskan sebagai berikut
t t
t
Y
e
Y
=
φ
0+
φ
1 −1+
(8)Dimana pada model tersebut terdapat dua parameter
yang akan diestimasi yaitu konstanta
φ
0 dankoefisien
φ
1. Persamaan (9) dan (10) akanmenemukan nilai estimasi untuk kedua parameter tersebut. 2 1 1 1 2 1 1 1 1 1 1 1 ) ( ) ( ) )( (
∑
∑
∑
∑
∑
= − = − = = − = − − − = n t t n t t n t t n t t n t t t y y n y y y y nφ
(9)n
y
n
y
n t t n t t∑
∑
= − =−
=
1 1 1 1 0φ
φ
(10)Nilai koefisien autoregressive,
φ
1, hasil estimasiyang telah diperoleh harus memenuhi persyaratan
kondisi
−
1
<
φ
1<
1
. Jika tidak, bisa jadi modelyang diajukan tidak sesuai.
2.1.2.2 Penaksiran Parameter Model AR(2)
Model AR(2) dapat dituliskan sebagai berikut
t t t
t
Y
Y
e
Y
=
φ
0+
φ
1 −1+
φ
2 −2+
(11)Untuk menemukan nilai estimasi ketiga parameter tersebut digunakan metode dekomposisi Choleski. Metode ini menggunakan aljabar matriks dalam komputasi koefisiennya.
Sama dengan model AR(1), koefisien model AR(2) yang diperoleh harus memenuhi kondisi-kondisi
tertentu, yaitu
−
1
<
φ
2<
1
,φ
2+
φ
1<
1
, dan1
1 2
−
φ
<
2.1.2.3 Penaksiran Parameter Model MA(1)
Model MA (1) dapat dituliskan sebagai berikut
t t
t
e
e
Y
=
µ
−
ω
1 −1+
(12) (20)Estimasi parameter untuk model MA(1) dilakukan dengan iterasi yang mencari nilai minimum dari SSR.
Sedangkan untuk konstanta MA lainnya,
µ
(konstanta mean), merupakan nilai rata-rata data observasi. Sehingga untuk mencari nilai konstanta ini tidak memerlukan iterasi.
2.1.2.4 Penaksiran Parameter Model MA(2)
Model MA (1) dapat dituliskan sebagai berikut
t t t
t
e
e
e
Y
=
µ
−
ω
1 −1−
ω
2 −2+
(13) (21)Langkah-langkah estimasi parameter untuk model MA(2) sama halnya dengan langkah-langkah estimasi parameter untuk model MA(1), namun karena pada model MA(2) koefisien yang
digunakan adalah
ω
1 danω
2, maka untuk mencarinilai SSR minimum iterasinya mempertimbangkan hasil kombinasi nilai kedua koefisien ini. Persyaratan yang harus dipenuhi oleh kedua
parameter ini adalah
−
1
<
ω
2<
1
,ω
2+
ω
1<
1
,dan
ω
2−
ω
1<
1
.2.1.3 Pengujian dan Pengecekan Diagnosa
Setelah dilakukan penaksiran (estimasi) parameter, berikutnya dilakukan pengujian dan pengecekan diagnosa. Untuk melakukan pengujian dan pengecekan diagnostik dapat digunakan dua cara:
• Ljung-Box Q* Statistic
• Box-Pierce Q Statistic
2.1.3.1 Ljung-Box Q*Statistic
Ljung Box Q-Statistic digunakan untuk menguji
apakah fungsi autokorelasi kesalahan semuanya tidak berbeda dari nol. Rumusan dari Q-Statistic ini adalah sebagai berikut:
(
) (
∑
)
= − − + = h k k r k n n n Q 1 2 1 * 2 (14) (22) dimana: kr
= koefisien autokorelasi kesalahan dengan lagk.
n
= banyaknya observasi series stasioner.Ljung Box Q-Statistic mendekati distribusi chi-square dengan derajat bebas k – p – q. Jika Q-Statistic lebih kecil dari nilai kritis chi-square
seperti yang tertera pada tabel, maka semua koefisien autokorelasi dianggap tidak berbeda
dengan nol atau model telah dispesifikasikan dengan benar.
2.1.3.2 Box-Pierce Q Statistic
Box Pierce Q-Statistic digunakan untuk menguji
apakah fungsi autokorelasi kesalahan semuanya tidak berbeda dari nol. Metode berikut ini cocok untuk data yang menggunakan model ARIMA (0,0,0).
∑
==
h k kr
n
Q
1 2 (14) (23)Box Pierce Q-Statistic mendekati distribusi chi-square dengan derajat bebas k – p – q. Jika Q-Statistic lebih kecil dari nilai kritis chi-square
seperti yang tertera pada tabel.
2.1.4 Melakukan Peramalan
Setelah melakukan persiapan data serta telah memilih model yang terbaik, langkah selanjutnya adalah melakukan peramalan dengan data dan model yang telah dipersiapkan sebelumnya.
3. Uji Coba
Data yang digunakan adalah data mulai tahun 2000 sampai dengan tahun 2003. Data dibagi menjadi 2 bagian, yaitu data untuk mencari model (data dari bulan Januari 2000 sampai Desember 2002) dan data untuk testing (data tahun 2003). Data dibagi menjadi rata-rata harian, rata-rata mingguan, dan rata-rata setiap bulan dalam 3 tahun.
3.1 Uji Coba terhadap Data Rata-rata Harian 3.1.1 Identifikasi
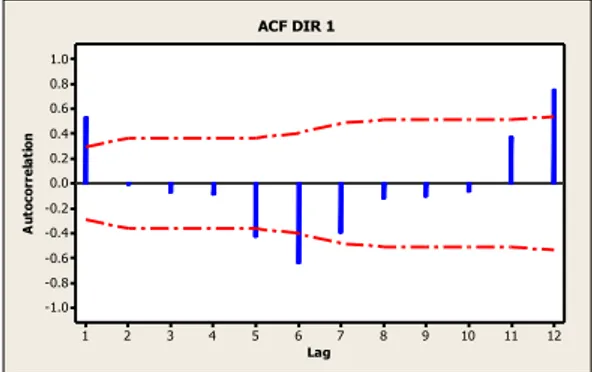
Identifikasi pada data bertujuan untuk mengetahui kestasioneran data baik stasioner dalam mean maupun varians. Proses identifikasi dapat dilakukan dengan menggunakan ACF Plot dan PACF plot yang ditunjukkan pada Gambar 3.1 dan Gambar 3.2. Lag A ut oc or re la ti on 12 11 10 9 8 7 6 5 4 3 2 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0 ACF DIR 1
Gambar 3.1.ACF Plot dari Data Rata-rata harian perbulan di DIR
1
Lag Pa rt ia l A ut oc or re la ti on 12 11 10 9 8 7 6 5 4 3 2 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0 PACF DIR 1
Gambar 3.2. PACF Plot dari Data Rata-rata harian perbulan di DIR 1
Dari ACF Plot pada Gambar 3.1. dan PACF plot pada Gambar 3.2 ditunjukkan bahwa data lalu lintas rata-rata harian perbulan sudah stasioner, baik dalam varian maupun mean. Kestasioneran data juga terbukti dari transformasi Box-Cox pada gambar 4.3. Karena data sudah stasioner dalam varians dan mean maka tidak perlu dilakukan transformasi dan differencing.
Lambda St De v 5.0 2.5 0.0 -2.5 -5.0 900 850 800 750 700 650 Upper CL Limit Lambda -2.78 (using 95.0% confidence) Estimate -2.78 Lower CL * Upper CL -0.23 Rounded Value
Box-Cox Plot of DIR 1
Gambar 3.3. Transformasi Box-Cox
Selain untuk mengetahui kestasioneran data ACF Plot dan PACF dapat digunakan untuk menentukan orde AR dan MA. Kemungkinan model ARIMA yang muncul adalah ARIMA (1,0,1), ARIMA (1,0,2), ARIMA (2,0,1), ARIMA (2,0,2) dan ARIMA (0,0,1) untuk seasonal.
3.1.2 Uji Signifikansi Parameter
Dari beberapa model yang diestimasi, setelah dilakukan uji coba ternyata hanya model ARIMA (1,0,2) saja yang siginifikan, sehingga hanya model tersebutlah yang akan melewati proses berikutnya. Gambar 3.4 dan table 3.1 adalah hasil uji coba untuk model ARIMA (1,0,2).
Final Estimates of Parameters Type Coef SE Coef T P AR1 0.8328 0.2208 3.77 0.001 MA1 0.3428 0.3325 1.03 0.311 MA2 0.7973 0.1086 7.34 0.000 SMA12-0.7250 0.3005 -2.41 0.022 Constant 1615.01 0.27 6040.62 0.000 Mean 9661.96 1.60
Gambar 3.4 Hasil Estimasi Parameter ARIMA(1,0,2)
Tabel 3.1 estimasi parameter ARIMA(1,0,2)
Parameter P_Value α Keputusan
AR 0.001 0.05 Signifikan
MA 0.000 0.05 Signifikan
SMA 0.022 0.05 Signifikan
3.1.3 Diagnostic Checking
Setelah parameter model diuji maka selanjutnya dilakukan pengujian pada residual (diagnostic
checking). Pengujian pada residual model terdiri
dari 2 yaitu pengujian independent dan kehomogenan varians residual (white noise) serta uji kenormalan residual. Kedua uji tersebut hanya diperuntukkan model ARIMA(1,0,2) karena model yang lain tidak lolos proses sebelumnya.
3.1.3.1 Uji White Noise
Hasil uji Box Pierce untuk model ARIMA(1,0,2) dapat dilihat pada gambar 3.5.
Modified Box-Pierce (Ljung-Box) Chi-Square statistic
Lag 12 24 36 48 Chi-Square 21.8 46.1 * * DF 7 19 * * P-Value 0.003 0.000 * *
Gambar 3.5 Hasil Perhitungan Ljung-Box ARIMA(1,0,2) Tabel 3.2 Pengujian Ljung-Box ARIMA(1,0,2)
Lag P_Value α Keputusan
12 0.003 0.05 Terima H0
24 0.000 0.05 Terima H0
Berdasarkan gambar 3.5, dibuat tabel 3.2. Tabel 3.2 memberikan informasi bahwa P_Value < α maka dapat disimpulkan bahwa residual bersifat white
noise.
3.1.4 Peramalan volume lalu lintas dengan menggunakan model ARIMA(1,0,2)
Hasil peramalan dan data asli dapat dilihat pada gambar 3.6.
Plot Data Asli dan Data Hasil Ramalan
0 2000 4000 6000 8000 10000 12000 1 2 3 4 5 6 7 8 9 10 11 12 Bulan V ol um e la lu Li nt as Data Asli Data Ramalan
Gambar 3.6. Plot Data Asli dan Data Hasil Ramalan
Sedangkan hasil uji normalitas residualnya dapat dilihat pada gambar berikut.
Nilai Pe rc en t 11500 11000 10500 10000 9500 9000 8500 8000 99 95 90 80 70 60 50 40 30 20 10 5 1 Mean >0.150 9561 StDev 679.1 N 12 KS 0.140 P-Value normality residual Normal
Gambar 3.7. Normalitas Residual
Dari gambar 3.6 dan gambar 3.7 terlihat bahwa pola data hasil ramalan hampir sama dengan pola data asli. Hal ini menunjukkann bahwa hasil ramalan sudah dapat dianggap benar (MAPE sebesar 2,071% dan nilai p residual >1.50).
3.2 Uji Coba Data Rata-Rata Mingguan 3.2.1 Identifikasi
Proses identifikasi dapat dilakukan dengan menggunakan ACF Plot dan PACF plot yang ditunjukkan pada Gambar 3.8 dan Gambar 3.9.
Lag A u to co rr e la ti o n 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0
ACF Plot Data Rata-Rata Harian Perminggu
Gambar 3.8. ACF Plot dari Data Rata-rata harian perminggu
Lag P a rt ia l A u to co rr e la ti o n 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0
PACF Plot Data Rata-Rata Harian Perminggu
Gambar 3.9. PACF Plot dari Data Rata-rata harian perminggu
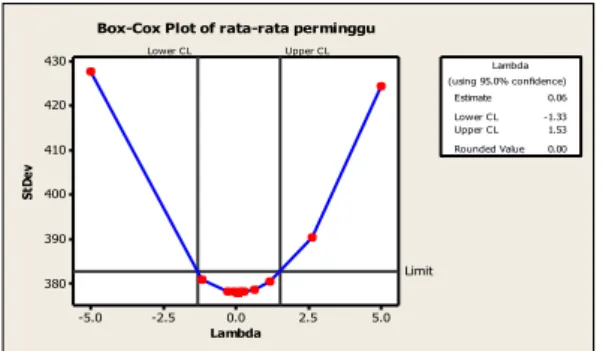
Dari ACF Plot dan PACF ditunjukkan bahwa data lalu lintas rata-rata harian perminggu belum stasioner. Ketidakstasioneran data juga terbukti dari transformasi Box-Cox pada gambar 3.10.
Lambda St D ev 5.0 2.5 0.0 -2.5 -5.0 430 420 410 400 390 380 Lower CL Upper CL Limit Lambda 0.00 (using 95.0% confidence) Estimate 0.06 Lower CL -1.33 Upper CL 1.53 Rounded Value
Box-Cox Plot of rata-rata perminggu
Gambar 3.10 Transformasi Box-Cox
Karena data belum stasioner dalam varians dan mean maka perlu dilakukan transformasi dan
differencing. Hasil ACF dan PACF untuk hasil
transformasi dan differencing dapat dilihat pada gambar 3.11.dan 3.12.
Gambar 3.11. ACF Plot dari Data Rata-rata harian perminggu (Differencing)
Dari ACF Plot dan PACF ditunjukkan bahwa data lalu lintas rata-rata harian perminggu sudah stasioner. Kestasioneran data juga terbukti dari transformasi Box-Cox yang ditunjukkan pada gambar 3.13. Lag P a rt ia l A u to co rr e la ti o n 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0
PACF Plot Data Rata-Rata Harian Perminggu (Differencing)
Gambar 3.12. PACF Plot dari Data Rata-rata harian perminggu (Differencing) Lambda S tD e v 5.0 2.5 0.0 -2.5 -5.0 430 420 410 400 390 380 Lower CL Upper CL Limit Lambda 0.00 (using 95.0% confidence) Estimate 0.06 Lower CL -1.33 Upper CL 1.53 Rounded Value
Box-Cox Plot of dir2 perminggu
Lag A ut oc or re la ti on 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0
Gambar3.13. Transformasi Box-Cox
Dari keterangan diatas, kemungkinan model ARIMA yang muncul adalah ARIMA (1,1,1), ARIMA (1,1,2), ARIMA (2,1,1), ARIMA (2,1,2) dan ARIMA (0,0,1) untuk seasonal.
3.2.2 Uji Signifikansi Parameter
Setelah ditemukan model ARIMA (1,1,1), ARIMA (1,1,2), ARIMA (2,1,1), ARIMA (2,1,2) dan ARIMA (0,0,1) untuk seasonal, maka perlu dlakukan uji signifikansi parameter untuk masing-maing model ARIMA.
Setelah dilakukan ujisignifikansi terhadap semua model, ternyata hanya model ARIMA(2,1,2) yang memenuhi. Hasil uji signifikansi dapat dilihat pada gambar 3.14 dan tabel 3.3
Final Estimates of Parameters
Type Coef SE Coef T P AR1 1.0604 0.0557 19.02 0.000 AR2 -0.7482 0.0673 -11.12 0.000 SAR48-0.9771 0.0377 -25.91 0.000 MA1 1.3668 0.0259 52.77 0.000 MA2 -0.9761 0.0207 -47.12 0.000 SMA48-0.7231 0.1036 -6.98 0.000 Constant-3.69 39.55 -0.09 0.926 Gambar 3.14 Hasil Estimasi Parameter ARIMA(2,1,2) Tabel 3.3 Estimasi parameter ARIMA(2,1,2)
Parameter P_Value α Keputusan
AR 0.000 0.05 Signifikan
SAR 0.000 0.05 Signifikan
MA 0.000 0.05 Signifikan
SMA 0.000 0.05 Signifikan
3.2.3 Diagnostic Checking 3.2.3.1 Uji White Noise
Hasil uji Box Pierce untuk model ARIMA(2,1,2)
dapat dilihat pada gambar dan table
berikut:Modified Box-Pierce (Ljung-Box)
Chi-Square statistic
Lag 12 24 36 48 Chi-Square 39.1 72.5 93.1 126.3 DF 5 17 29 41 P-Value 0.000 0.000 0.000 0.000 Gambar 3.15 Hasil Perhitungan Ljung-Box ARIMA(2,1,2)
Tabel 3.4 Pengujian Ljung-Box ARIMA(2,1,2)
Lag P_Value α Keputusan
12 0.000 0.05 Terima H0
24 0.000 0.05 Terima H0
36 0.000 0.05 Terima H0
48 0.000 0.05 Terima H0
Tabel 3.4 memberikan informasi bahwa P_Value < α maka dapat disimpulkan bahwa residual bersifat
white noise. Ini menunjukkan bahwa sementara
model ARIMA (2,1,2) merupakan model yang sesuai.
3.2.4 Peramalan volume lalu lintas
dengan
menggunakan
model
ARIMA(2,1,2)
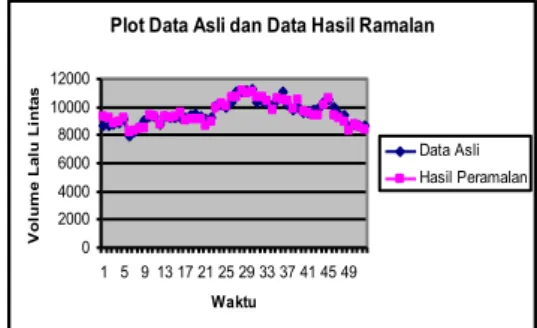
Hasil peramalan dan data aslinya dapat dilihat pada gambar 3.16. Sedangkan hasil uji normalitas residualnya dapat dilihat pada gambar 3.17.
Plot Data Asli dan Data Hasil Ramalan
0 2000 4000 6000 8000 10000 12000 1 5 9 13 17 21 25 29 33 37 41 45 49 Waktu V ol um e La lu Li nt a s Data Asli Hasil Peramalan
Gambar 3.16 Plot Data Asli dan Data Hasil Ramalan
Dari gambar 3.16 terlihat bahwa pola data hasil ramalan hamper sama dengan pola data asli. Hal ini menunjukkan bahwa hasil ramalan sudah dapat dianggap benar (MAPE sebesar 2,342%). Hal ini juga didukung oleh hasil tes normalitas residual pada gambar 3.17 yang menunjukkan nilai p > 1.50.
Residual P e rc e n t 750 500 250 0 -250 -500 99 95 90 80 70 60 50 40 30 20 10 5 1 Mean >0.150 67.97 StDev 270.0 N 48 KS 0.101 P-Value
Hasil Normality Test untuk Residual
Gambar 3.17. Normalitas Residual
3.3 Uji Coba Data Harian
3.3.1
IdentifikasiDari ACF Plot, PACF plot, dan Box-Cox ditunjukkan bahwa data lalu lintas rata-rata harian belum stasioner, baik dalam varian maupun mean. Karena data belum stasioner dalam varians dan mean maka perlu dilakukan transformasi dan
differencing.
Berikut hasil ACF dan PACF untuk hasil transformasi dan differencing dapat dilihat pada gambar 3.18 dan 3.19 berikut:
Lag A ut oc or re la ti on 60 55 50 45 40 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0
ACF Plot Data Rata-Rata Harian Pertahun (Differencing)
Gambar 3.18. ACF Plot dari Data Rata-rata harian pertahun (Differencing) Lag P a rt ia l A u to co rr e la ti o n 60 55 50 45 40 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0
PACF Plot Data Rata-Rata Harian Pertahun (Differencing)
Gambar 3.19. PACF Plot dari Data Rata-rata harian pertahun (Differencing)
Sehingga, dari hasil plot diatas, kemungkinan model ARIMA yang muncul adalah ARIMA (1,1,1), ARIMA (1,1,2), ARIMA (2,1,1), ARIMA (2,1,2).
3.3.2 Uji Signifikansi Parameter
Ternyata setelah dilakukan uji parameter, model yang memenuhi adalah ARIMA (1,1,1), sehingga model hanya model tersebut yang akan melewati proses berikutnya. Berikut hasil ujinya.
Final Estimates of Parameters
Type Coef SE Coef T P AR1 0.1030 0.2732 0.38 0.109 MA1 -0.6895 0.2436 -2.83 0.008 Constant8686.5 284.8 30.50 0.000 Mean 9683.7 317.5
Gambar 3.20 Hasil Estimasi parameter ARIMA(1,1,1)
Tabel 3.5 menunjukkan bahwa semua parameter untuk model ARIMA (1,1,1) signifikan sehingga dapat dilanjutkan pada pengujian berikutnya.
Tabel 3.5 Estimasi Parameter ARIMA(1,1,1)
Parameter P_Value α Keputusan
AR 0.109 0.05 Signifikan
MA 0.008 0.05 Signifikan
3.3.3 Diagnostic Checking 3.3.3.1 Uji White Noise
Hasil uji Box Pierce untuk model ARIMA(1,1,1) dapat dilihat pada gambar dan table 3.21.
Modified Box-Pierce (Ljung-Box) Chi-Square statistic
Lag 12 24 36 48 Chi-Square 21.8 46.1 * * DF 7 19 * * P-Value 0.003 0.000 * *
Gambar 3.21 Hasil Perhitungan Ljung-Box ARIMA(1,1,1)
Tabel 3.6 memberikan informasi bahwa P_Value < α maka dapat disimpulkan bahwa residual bersifat
white noise.
Tabel 3.6 Pengujian Ljung-Box ARIMA(1,1,1)
Lag P_Value α Keputusan
12 0.003 0.05 Terima H0
24 0.000 0.05 Terima H0
3.3.4 Peramalan volume lalu lintas dengan menggunakan model ARIMA(1,1,1)
Plot Data Asli dengan Data Hasil Ramalan
0 2000 4000 6000 8000 10000 12000 1 44 87 130 173 216 259 302 345 Waktu V ol um e La lu Li nt a s Data Asli Data Hasil Ramalan
Gambar 3.32. Plot Data Asli dan Data Hasil Ramalan
Dari gambar 3.32 terlihat bahwa pola data hasil ramalan sangat berbeda dengan pola data asli. Hal ini juga didukung oleh MAPE sebesar 6.46%. Hal ini mungkin karena jumlah data yang kurang (hanya memenuhi 1 sesi data).
4. SIMPULAN
1. Untuk perbandingan peramalan model ARIMA dalam jangka pendek seperti rata-rata per bulan lebih baik daripada jangka panjang seperti rata-rata per tahun.
2. Hasil menunjukkan bahwa metode time series dapat digunakan untuk mengembangkan peramalan jangka pendek dengan tingkat keakuratan tinggi.
3. Teknik yang diusulkan tidak akurat untuk peramalan jangka panjang seperti data harian dalam setahun karena sifat dasar dari model Box-Jenkins adalah merujuk pada pengamatan di waktu lampau.
4. DAFTAR PUSTAKA
Box, G., G. Jenkins and G. Reinsel, 1994,Time
Series Analysis: Forecasting and Control, Prentice
Hall.
Davis, C., 2002, Statistical Methods for the
Analysis of Repeated Measurements, New York.
Kim, J., 2003, Forecasting Autoregressive Time Series with Bais- corrected Parameter Estimators,
International Journal of Forecasting, 19: 493-502.
Lattin J., J. Carrol and P. Green, 2003,Analyzing
Multivariate Data, U.K.,
Makridakis S. and Wheelwright, 1999, Forecasting Framework and Overview, Management Sciences, 12: 1-15.
Sabry , M., Latif, H. A, Yousef, S. dan Badra, N. 2007, Use of Box and Jenkins Time Series Technique in Traffic Volume Forecasting, Journal
of Social Sciences, 2: 83-90.
Smith, B., B. Williams and R. Oswald, 2002, Comparison of Parametric and Nonparametric Models for Traffic Transportation Research, 10: 257-321