Rancang Bangun Sistem Pelacak Posisi Kendaraan Menggunakan Global
Positioning System (GPS)
Ansorul Khalim
Harris Pirngadi
Suwito
Jurusan Teknik Elektro
-FTI, ITS, Surabaya-60111,Email:www.its.ac.id
Abstrak— Alarm pencurian kendaraan bermotor merupakan hal yang umum di Indonesia. Dewasa ini pencurian kendaraan bermotor masih sering terjadi . Umumnya alarm berhasil dimatikan pencuri, sehingga pencuri akan leluasa membawa mobil ke mana saja. Hal ini sangat sulit bagi pemilik untuk melacak posisi mobilnya. Dengan membuat suatu sistem yang mengintegrasikan beberapa perangkat elektronik GPS receiver, mikrokontroler, dan handphone yang dipasangkan pada mobil, maka dapat dilakukan proses monitoring posisi mobil. Data posisi dari GPS receiver akan dikirim ke server melalui SMS dan modulasi FSK. Pada server juga terdapat handphone untuk menerima data SMS dan modulasi FSK. Server kemudian akan mengolah data tersebut untuk ditampilkan pada peta di komputer.Telah dilakukan pengujian realisasi sistem dengan menggunakan media HP. Pengujian dengan fasilitas sms mampu melacak posisi kendaraan dengan menampilkan posisi mobil pada peta. Pengujian dengan modulasi FSK 1200 bps memiliki error sebesar 100%.
I.
PENDAHULUAN
Kemajuan teknologi saat ini, yaitu sistem navigasi yang bernama Global Possitioning System (GPS ) dapat digunakan untuk melacak keberadaan suatu objek. Kemampuan GPS dapat memberikan informasi tentang posisi, kecepatan, dan waktu secara cepat, akurat, dimana saja di bumi ini tanpa tergantung cuaca. Untuk memanfaatkan sinyal GPS, maka harus tersedia perangkat pendukung seperti antena GPS sebagai penangkap sinyal yang kemudian diproses oleh GPS
receiver. Dengan menambahkan perangkat seperti GPS receiver, mikrokontroler, dan handphone yang telah diintegrasikan sedemikian rupa pada kendaraan, memungkinkan pemilik kendaraan bisa mengetahui dimana posisi kendaraannya setiap saat meskipun dari jarak jauh selama kendaraan tersebut masih berada dalam jangkauan provider GSM (Global System for Mobile Communication).
II.
DASAR TEORI
2.1. Global Possitioning System (GPS)
Global Possitioning System (GPS) adalah sistem satelit
navigasi dan penentuan posisi yang dimiliki dan dikelola oleh Amerika Serikat, dengan nama resminya NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Possitioning
System). GPS dikembangkan pertama kali oleh Departemen
pertahanan Amerika Serikat pada tahun 1978 dan secara resmi GPS dinyatakan operasional pada tahun 1994.[1]
Beberapa karakteristik yang menjadikan GPS menarik untuk digunakan yaitu sistem ini didesain untuk memberikan
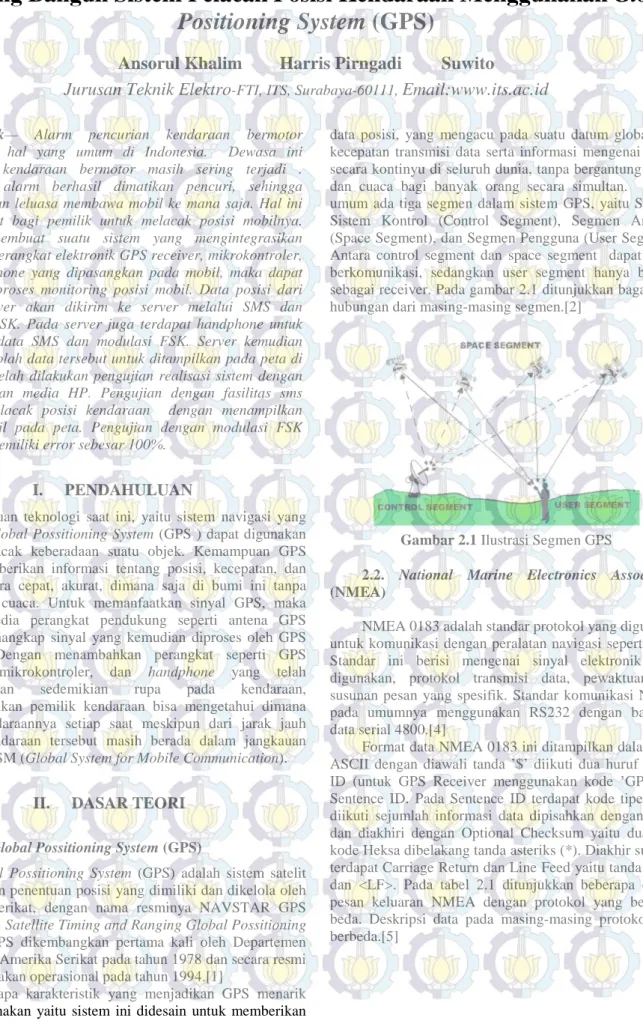
data posisi, yang mengacu pada suatu datum global, dan kecepatan transmisi data serta informasi mengenai waktu secara kontinyu di seluruh dunia, tanpa bergantung waktu dan cuaca bagi banyak orang secara simultan. Secara umum ada tiga segmen dalam sistem GPS, yaitu Segmen Sistem Kontrol (Control Segment), Segmen Angkasa (Space Segment), dan Segmen Pengguna (User Segment). Antara control segment dan space segment dapat saling berkomunikasi, sedangkan user segment hanya bersifat sebagai receiver. Pada gambar 2.1 ditunjukkan bagaimana hubungan dari masing-masing segmen.[2]
Gambar 2.1 Ilustrasi Segmen GPS
2.2. National Marine Electronics Association
(NMEA)
NMEA 0183 adalah standar protokol yang digunakan untuk komunikasi dengan peralatan navigasi seperti GPS. Standar ini berisi mengenai sinyal elektronik yang digunakan, protokol transmisi data, pewaktuan dan susunan pesan yang spesifik. Standar komunikasi NMEA pada umumnya menggunakan RS232 dengan baudrate data serial 4800.[4]
Format data NMEA 0183 ini ditampilkan dalam teks ASCII dengan diawali tanda ’$’ diikuti dua huruf Talker ID (untuk GPS Receiver menggunakan kode ’GP’) dan Sentence ID. Pada Sentence ID terdapat kode tipe pesan diikuti sejumlah informasi data dipisahkan dengan koma dan diakhiri dengan Optional Checksum yaitu dua digit kode Heksa dibelakang tanda asteriks (*). Diakhir susunan terdapat Carriage Return dan Line Feed yaitu tanda <CR> dan <LF>. Pada tabel 2.1 ditunjukkan beberapa contoh pesan keluaran NMEA dengan protokol yang berbeda-beda. Deskripsi data pada masing-masing protokol juga berbeda.[5]
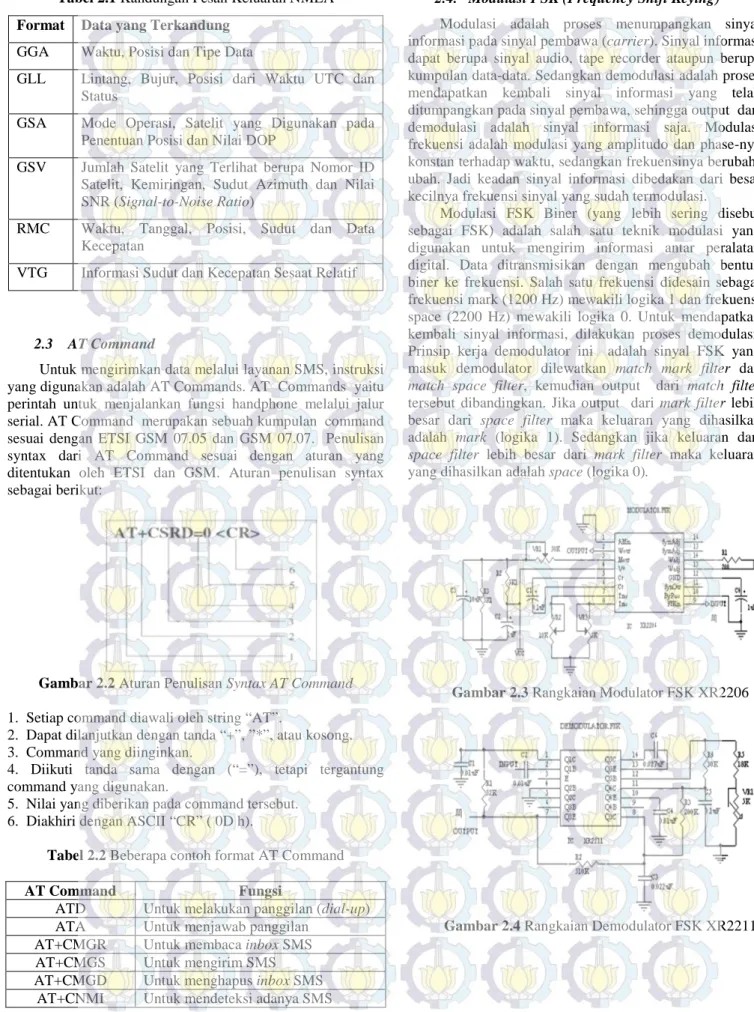
Tabel 2.1 Kandungan Pesan Keluaran NMEA
Format Data yang Terkandung
GGA Waktu, Posisi dan Tipe Data
GLL Lintang, Bujur, Posisi dari Waktu UTC dan Status
GSA Mode Operasi, Satelit yang Digunakan pada Penentuan Posisi dan Nilai DOP
GSV Jumlah Satelit yang Terlihat berupa Nomor ID Satelit, Kemiringan, Sudut Azimuth dan Nilai SNR (Signal-to-Noise Ratio)
RMC Waktu, Tanggal, Posisi, Sudut dan Data Kecepatan
VTG Informasi Sudut dan Kecepatan Sesaat Relatif
2.3 AT Command
Untuk mengirimkan data melalui layanan SMS, instruksi yang digunakan adalah AT Commands. AT Commands yaitu perintah untuk menjalankan fungsi handphone melalui jalur serial. AT Command merupakan sebuah kumpulan command sesuai dengan ETSI GSM 07.05 dan GSM 07.07. Penulisan syntax dari AT Command sesuai dengan aturan yang ditentukan oleh ETSI dan GSM. Aturan penulisan syntax sebagai berikut:
Gambar 2.2 Aturan Penulisan Syntax AT Command
1. Setiap command diawali oleh string “AT”.
2. Dapat dilanjutkan dengan tanda “+”, ”*”, atau kosong. 3. Command yang diinginkan.
4. Diikuti tanda sama dengan (“=”), tetapi tergantung command yang digunakan.
5. Nilai yang diberikan pada command tersebut. 6. Diakhiri dengan ASCII “CR” ( 0D h).
Tabel 2.2 Beberapa contoh format AT Command
AT Command Fungsi
ATD Untuk melakukan panggilan (dial-up) ATA Untuk menjawab panggilan
AT+CMGR Untuk membaca inbox SMS AT+CMGS Untuk mengirim SMS AT+CMGD Untuk menghapus inbox SMS
AT+CNMI Untuk mendeteksi adanya SMS
2.4. Modulasi FSK (Frequency Shift Keying) Modulasi adalah proses menumpangkan sinyal informasi pada sinyal pembawa (carrier). Sinyal informasi dapat berupa sinyal audio, tape recorder ataupun berupa kumpulan data-data. Sedangkan demodulasi adalah proses mendapatkan kembali sinyal informasi yang telah ditumpangkan pada sinyal pembawa, sehingga output dari demodulasi adalah sinyal informasi saja. Modulasi frekuensi adalah modulasi yang amplitudo dan phase-nya konstan terhadap waktu, sedangkan frekuensinya berubah-ubah. Jadi keadan sinyal informasi dibedakan dari besar kecilnya frekuensi sinyal yang sudah termodulasi.
Modulasi FSK Biner (yang lebih sering disebut sebagai FSK) adalah salah satu teknik modulasi yang digunakan untuk mengirim informasi antar peralatan digital. Data ditransmisikan dengan mengubah bentuk biner ke frekuensi. Salah satu frekuensi didesain sebagai frekuensi mark (1200 Hz) mewakili logika 1 dan frekuensi space (2200 Hz) mewakili logika 0. Untuk mendapatkan kembali sinyal informasi, dilakukan proses demodulasi. Prinsip kerja demodulator ini adalah sinyal FSK yang masuk demodulator dilewatkan match mark filter dan
match space filter, kemudian output dari match filter tersebut dibandingkan. Jika output dari mark filter lebih besar dari space filter maka keluaran yang dihasilkan adalah mark (logika 1). Sedangkan jika keluaran dari
space filter lebih besar dari mark filter maka keluaran
yang dihasilkan adalah space (logika 0).
Gambar 2.3 Rangkaian Modulator FSK XR2206
III.
PERANCANGAN SISTEM
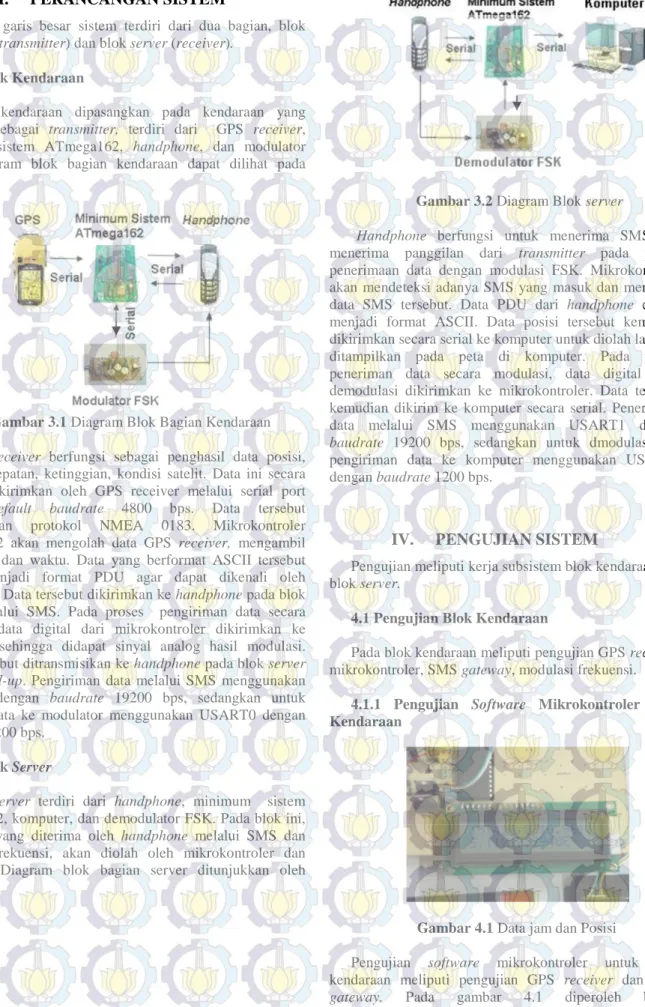
Secara garis besar sistem terdiri dari dua bagian, blok kendaraan (transmitter) dan blok server (receiver).
3.1 Blok Kendaraan
Blok kendaraan dipasangkan pada kendaraan yang bertindak sebagai transmitter, terdiri dari GPS receiver, minimum sistem ATmega162, handphone, dan modulator FSK. Diagram blok bagian kendaraan dapat dilihat pada gambar 3.1.
Gambar 3.1 Diagram Blok Bagian Kendaraan
GPS receiver berfungsi sebagai penghasil data posisi, waktu, kecepatan, ketinggian, kondisi satelit. Data ini secara periodik dikirimkan oleh GPS receiver melalui serial port dengan default baudrate 4800 bps. Data tersebut menggunakan protokol NMEA 0183. Mikrokontroler ATmega162 akan mengolah data GPS receiver, mengambil data posisi dan waktu. Data yang berformat ASCII tersebut diubah menjadi format PDU agar dapat dikenali oleh
handphone. Data tersebut dikirimkan ke handphone pada blok server melalui SMS. Pada proses pengiriman data secara modulasi, data digital dari mikrokontroler dikirimkan ke modulator sehingga didapat sinyal analog hasil modulasi. Sinyal tersebut ditransmisikan ke handphone pada blok server melalui dial-up. Pengiriman data melalui SMS menggunakan USART1 dengan baudrate 19200 bps, sedangkan untuk transmisi data ke modulator menggunakan USART0 dengan
baudrate 1200 bps. 3.2 Blok Server
Blok server terdiri dari handphone, minimum sistem ATmega162, komputer, dan demodulator FSK. Pada blok ini, data GPS yang diterima oleh handphone melalui SMS dan modulasi frekuensi, akan diolah oleh mikrokontroler dan komputer. Diagram blok bagian server ditunjukkan oleh gambar 3.2.
Gambar 3.2 Diagram Blok server
Handphone berfungsi untuk menerima SMS dan
menerima panggilan dari transmitter pada proses penerimaan data dengan modulasi FSK. Mikrokontroler akan mendeteksi adanya SMS yang masuk dan mengolah data SMS tersebut. Data PDU dari handphone diubah menjadi format ASCII. Data posisi tersebut kemudian dikirimkan secara serial ke komputer untuk diolah lagi dan ditampilkan pada peta di komputer. Pada proses peneriman data secara modulasi, data digital hasil demodulasi dikirimkan ke mikrokontroler. Data tersebut kemudian dikirim ke komputer secara serial. Penerimaan data melalui SMS menggunakan USART1 dengan
baudrate 19200 bps, sedangkan untuk dmodulasi dan
pengiriman data ke komputer menggunakan USART0 dengan baudrate 1200 bps.
IV.
PENGUJIAN SISTEM
Pengujian meliputi kerja subsistem blok kendaraan dan blok server.
4.1 Pengujian Blok Kendaraan
Pada blok kendaraan meliputi pengujian GPS receiver, mikrokontroler, SMS gateway, modulasi frekuensi.
4.1.1 Pengujian Software Mikrokontroler Blok Kendaraan
Gambar 4.1 Data jam dan Posisi
Pengujian software mikrokontroler untuk blok kendaraan meliputi pengujian GPS receiver dan SMS
gateway. Pada gambar 4.1 diperoleh bahwa mikrokontroler dapat mengambil data posisi dan waktu
dari GPS receiver. Pengujian SMS gateway dilakukan dengan mengirimkan data posisi yang didapat ke handphone server. Data GPS yang telah diolah oleh mikrokontroler kemudian akan dikirimkan melalui SMS ke blok server. Data tersebut (format ASCII 8 bit) harus diubah dulu menjadi data PDU (format 7 bit) agar kompatibel dengan format data pada
handphone. Dari hasil pengujian sebanyak 10 kali, semua data
dapat dikirimkan dan diterima di handphone server tanpa ada kesalahan.
4.1.2 Pengujian Rangkaian Modulator
Pengujian rangkaian modulator dilakukan dengan cara memberikan input logika 1 (3.3-5 volt) dan input logika 0 (0-0.8 volt) pada input modulator. Output dari rangkaian modulator adalah sinyal sinusoida dengan frekuensi 1200 Hz ketika mendapat input logika 1 dan 2200 Hz ketika mendapat input logika 0. Output modulator akan dihubungkan dengan pin microphone dari handphone. Sehingga sinyal yang dikirimkan oleh handphone saat melakukan dial adalah sinyal dari output modulator. Bentuk sinyal output modulator ketika terjadi perubahan input dari logika 0 menjadi logika 1 dapat dilihat pada Gambar 4.2.
Gambar 4.2 Bentuk Sinyal Output Modulator Saat Terjadi
Perubahan Logika Input
4.2 Pengujian Blok Server
Pada blok server meliputi pengujian mikrokontroler, penerimaan SMS, demodulasi frekuensi dan software peta digital.
4.2.1 Pengujian Pembacaan SMS dan Komunkasi Serial Komputer
Data SMS yang masuk dapat diubah dari format PDU menjadi ASCII tanpa ada kesalahan. Data tersebut kemudian dikirimkan ke komputer.
Gambar 4.3 Pengujian Komunikasi Serial Mikrokontroler
4.2.2 Pengujian Rangkaian Demodulator
Pengujian rangkaian demodulator dilakukan dengan memberi input berupa sinyal sinusoida dengan frekuensi yang bebeda, yakni 1200 Hz dan 2200 Hz. Pada pengujian dengan frekuensi input 1200 Hz, output demodulator adalah sinyal logika 1 (5 volt). Pada pengujian dengan frekuensi input 2200 Hz, output demodulator adalah sinyal logika 0 (0-0.2 volt). Pengujian berikutnya yaitu menghubungkan output rangkaian modulator ke input rangkaian demodulator. Pengujian ini dilakukan untuk membandingkan sinyal input dengan sinyal output. Input rangkaian modulator diberi input dari pin TXD mikrokontroler. Hasil pengujian dapat dilihat pada Gambar 4.4.
Gambar 4.4 Sinyal Input Modulator dan Output
Demodulator
Tabel 4.1 Hasil Pengujian Demodulator
Frekuensi (Hz) Output Keterangan 300 – 600 Dominan 0 Tidak stabil 800 – 900 Dominan 1 Tidak stabil 1000 – 1600 Dominan 1 Stabil 1800 – 2600 Dominan 0 Stabil
2700 Dominan 0 Tidak stabil
4.2.3 Pengujian Software Peta Digital
Pada pengujian ini data posisi (koordinat lintang dan bujur) yang diterima dari mikrokontroler atau handphone akan diolah oleh PC untuk ditampilkan pada peta. Posisi dari objek akan ditandai oleh titik merah pada peta. Ketelitian dari software ini bergantung (sebanding) pada akurasi GPS receiver. Pengujian dilakukan dengan membandingkan posisi yang ditunjukkan oleh software peta digital dengan posisi yang ditunjukkan oleh Google
V.
PENUTUP
5.1Kesimpulan
Dari serangkaian pengujian dan analisa yang telah dilakukan pada realisasi alat yang dirancang dalam tugas akhir ini maka dapat diambil beberapa kesimpulan sebagai berikut : 1) Frekuensi sinyal yang dapat ditransmisikan oleh
handphone berada pada range 300-4000 Hz,
2) Modulasi FSK dengan baudrate 1200 bps tidak dapat diaplikasikan pada handphone,
3) Software peta digital yang dibuat dapat diaplikasikan pada
Sistem Pelacak Posisi Kendaraan untuk wilayah Surabaya Timur.
4) Teknologi GPS dan SMS dapat diaplikasikan pada Sistem Pelacak Posisi Kendaraan.
5.2 Saran
Dalam penyempurnaan tugas akhir ini maka diperlukan saran untuk keperluan pengembangan selanjutnya. Antara lain:
1) Software peta digital yang dibuat memiliki cakupan area
yang lebih luas.
2) Pembuatan Sistem database pada aplikasi pelacakan posisi kendaraan.
DAFTAR PUSTAKA
[1] Totok, Sistem Persinyalan, <URL:http: //www.myhobbyblogs.com/railfan/2008/01/16/Sistem Persinyalan>, 23 April 2009, 20:43.Serway, Raymon A. Jewwet, John W. “Physics For Scientists And Engineers”. Thomson Brook. USA. 2004.
[2] ..., Garmin GPS Guide for Beginners, Garmin International, USA, 2000.
[3] Frederic G. Snider, GPS : Theory, Practice, and Applications, <URL:http://www.PDHCenter.org/>, 19 Februari 2009, 08:29.
[4] Hasanuddin Z. Abidin, 2007, Modul 2 : GPS Signal and Data, Lecture Slides, Geodesy Research Division ITB, Bandung, 2007.
[5] ..., NMEA Reference Manual, SiRF Technology, USA, 2005.
Datasheet ATmega162, www.atmel.com Datasheet XR2206, www.alldatasheet.com Datasheet XR2211, www.alldatasheet.com
BIOGRAFI
Harris Pirngadi hingga penerbitan jurnal ini yang
bersangkutan belum memasukkan biografinya ke redaksi.
Suwito hingga penerbitan jurnal ini yang bersangkutan
belum memasukkan biografinya ke redaksi.
Ansorul Khalim, dilahirkan di Pasuruan pada tanggal
25 Agustus 1988. Merupakan putra pertama dari dua bersaudara. Jenjang pendidikan penulis dimulai dengan menamatkan pendidikan dasar di SD Ma’arif Gempol pada tahun 2000. Pada tahun2003 penulis menamatkan pendidikan menengah pertama di SLTP Negeri 1 Gempol. Kemudian penulis melanjutkan ke SMA Negeri 1 Pandaan hingga lulus tahun 2006. Pada tahun yang sama penulis mengikuti test masuk perguruan tinggi melalui jalur SPMB dan diterima di Jurusan Teknik Elektro ITS Surabaya.