TUGAS AKHIR
PENGENDALIAN MOTOR DC PADA BILLBOARD
BERBASIS MIKROKONTROLLER AT89S51
Diajukan Guna Melengkapi Sebagian Syarat Dalam Mencapai Gelar Sarjana Strata Satu (S1)
Disusun Oleh :
Nama : Rudy Handoko
NIM : 41405110097
Program Studi : Teknik Elektro
Peminatan : Elektronika
Pembimbing : Eko Ihsanto, Ir. M.Eng.
TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA
2009
LEMBAR PERNYATAAN
Yang bertanda tangan di bawah ini,
N a m a : Rudy Handoko N.I.M : 41405110097 Program Studi : Teknik Elektro Fakultas : Teknologi Industri
Judul Skripsi : Pengendalian Motor DC Pada Billboard Berbasis Mikrokontroller AT89S51
Dengan ini menyatakan bahwa hasil penulisan Skripsi yang telah saya buat ini merupakan hasil karya sendiri dan benar keasliannya. Apabila ternyata di kemudian hari penulisan Skripsi ini merupakan hasil plagiat atau penjiplakan terhadap karya orang lain, maka saya bersedia mempertanggungjawabkan sekaligus bersedia menerima sanksi berdasarkan aturan tata tertib di Universitas Mercu Buana.
Demikian, pernyataan ini saya buat dalam keadaan sadar dan tidak dipaksakan.
Penulis,
Materai Rp.6000
LEMBAR PENGESAHAN
Pengendalian Motor DC Pada Billboard
Berbasis Mikrokontroller AT89S51
Disusun Oleh : Nama : Rudy Handoko NIM : 41405110097 Peminatan : Elektronika Program Studi : Teknik Elektro Fakultas : Teknologi Industri
Menyetujui, Pembimbing,
(Eko Ihsanto, Ir. M.Eng. )
Mengetahui,
Koordinator Tugas Akhir / Ketua Jurusan Teknik Elektro,
ABSTRAK
Media iklan merupakan sarana informasi untuk memperkenalkan suatu produk kepada khalayak umum. Salah satu yang sering kita jumpai papan iklan reklame atau billboard di pinggiran jalan maupun dipertokoan. Dengan pembuatan alat rolling reklame ini maka iklan yang ditampilkan tidak monoton/ statis, seperti iklan-iklan yang suka dipajang atau ditempel di dinding pertokoan, terutama yang dalam ruangan (indoor).
Alat rolling billboard ini, manfaatnya bagi pengguna tidak perlu repot-repot untuk menggeser atau menempel pada dinding, dan selain tampilannya menjadi menarik, juga dapat mengiklankan secara berganti-ganti tampilan, yaitu dengan tampilan sebanyak empat slide gambar iklan, pada satu tempat sehingga tidak banyak memakan tempat.
Alat yang berbasis mikrokontroller AT89S51 ini berbentuk persegi panjang berukuran 65 x 57 Cm dengan tebal casing 5 Cm, sedangkan untuk tiap screen slidenya 50 x 40 Cm. Dalam tiap satu frame rolling, mendisplay satu slide gambar saja, dari empat slide gambar. Alat ini menggunakan 2 buah motor DC yang diletakan di atas dan di bawah casing, fungsinya untuk memutar screen slide gambar tadi, dengan cara motor DC-nya yang satu berputar sedangkan satunya lagi kondisi loss, begitu juga sebaliknya. Pergerakan motor tersebut mengunakan IC driver motor DC L293 dengan pengaplikasian H-Bridge. Sedangkan untuk waktu berhenti dan bergeraknya motor DC pada tiap slidenya diperlukan sensor posisi yaitu optocoupler, yang terdapat pada bagian bawah motor DC. Data-data pulsa cacahan yang dihasilkan dari putaran plat optocoupler inilah, sebagai masukan untuk diproses oleh mikrokontroller AT89S51 untuk menentukan kapan motor tersebut, harus berhenti atau tidak tiap slide gambarnya. Selanjutnya output dari mikrokontroller AT89S51 berguna untuk pemicu pengaturan driver motor L293 tadi, sehingga terjadi ketepatan perputaran motor DC pada saat running ataupun berhenti.
KATA PENGANTAR
Alhamdulillahi Rabbilallamin. Puji syukur kehadiran Allah SWT, berkat
taufik dan hidayah-Nya serta tidak lupa pula kepada junjungan Nabi besar Muhammad SAW, yang telah melimpahkan kepada Penulis sehingga Penulis dapat menyelesaikan Tugas Akhir ini dengan judul “ Pengendalian Motor DC Pada Billboard Berbasis Mikrokontroller AT89S51 “.
Adapun tujuan dari pada penyusunan Tugas Akhir ini adalah untuk memenuhi salah satu syarat guna memperoleh gelar sarjana strata satu (S1) pada Fakultas Teknologi Industri, Jurusan Teknik Elektro, Universitas Mercu Buana.
Penulis menyadari meskipun telah berusaha untuk menyajikan pembahasan sebaik mungkin, namun masih terdapat kekurangan dalam Tugas Akhir ini, hal ini terjadi dikarenakan masih terbatasnya kemampuan dan pengetahuan Penulis. Penulis mengharapkan kritik serta saran yang membangun untuk menyempurnakan Tugas Akhir ini.
Pada kesempatan ini, Penulis tidak lupa mengucapkan banyak terima kasih pada pihak-pihak, yang telah banyak memberikan bimbingan dan pengarahan dalam penyusunan Tugas Akhir ini hingga selesai, yaitu kepada :
1. Kedua Orang Tua, serta Abang, Kakak dan Keponakanku yang tercinta, yang selalu sabar membimbing Anaknya hingga kini dengan dukungan moril dan materil, semoga setelah lulus dapat memberikan yang terbaik untuk Keluarga (Amin).
2. Eko Ihsanto, Ir. M.Eng. selaku pembimbing yang telah memberikan kesempatan, waktu, saran, pikiran, dan tenaganya yang tak terhingga yang tak tergantikan oleh apapun dalam penyusunan Tugas Akhir ini.
3. Yudhi Gunardi, Ir. MT. selaku Ketua Jurusan Teknik Elektro, Universitas Mercu Buana.
4. Rektor, Dekan serta semua Dosen Jurusan Elektro, Universitas Mercu Buana yang telah mendidik dan memberikan pelajaran yang berharga sebagai warisan hidup.
5. Rekan-rekan Mahasiswa Teknik Elektro.
6. Dan semua pihak yang telah membantu Penulis dalam penyusunan Tugas Akhir ini, yang tidak dapat disebutkan satu persatu.
Kami berharap semoga Tugas Akhir ini dapat bermanfaat bagi para Pembaca, khususnya Mahasiswa Teknik Elektro Universitas Mercu Buana dan semoga dapat diterima bagi para Pembaca.
Jakarta, Februari 2009
DAFTAR ISI
Halaman Judul………. i
Halaman Pernyataan………... ii
Halaman Pengesahan………... iii
Abstrak...………... iv
Kata Pengantar……….... v
Daftar Isi………... vii
Daftar Tabel……….. x Daftar Gambar………. xi BAB I PENDAHULUAN 1.1 Latar Belakang.………... 1 1.2 Pembatasan Masalah.……….. 2 1.3 Tujuan Penelitian…….………... 2 1.4 Metodologi Penelitian………. 2 1.5 Sistematika Penulisan………. 3
BAB II LANDASAN TEORI 2.1 Mikrokontroller AT89S51……… 4
2.1.1 Arsitektur Mikrokontroller AT89S51………. 4
2.1.1.1 Instruction Decoder……… 9
2.1.1.2 Program Counter (PC) dan Data Pointer (DPTR).. 9
2.1.1.3 Register A dan B……… 9
2.1.1.4 Register Program Status Word (PSW)…………... 9
2.1.1.5 RAM Internal………. 10
2.1.1.6 ROM Internal………. 10
2.1.1.7 Stack Pointer (SP)……….. 10
2.1.1.9 Port 0, Port 1, Port 2 dan Port 3………. 11
2.1.2 Organisasi Memori……….. 11
2.1.3 Fasilitas Mikrokontroller AT89S51………. 11
2.1.3.1 Port Input/Output………... 11 2.1.3.2 Pewaktu CPU………. 12 2.1.3.3 Port Serial………... 12 2.1.3.4 Timer/ Counter………...……… 12 2.1.3.5 Reset………….……….. 16 2.1.4 Mode Pengalamatan MCS-51………. 16
2.1.4.1 Mode Pengalamatan Segera………... 16
2.1.4.2 Mode Pengalamatan Langsung……….. 16
2.1.4.3 Mode Pengalamatan Tidak Langsung……… 17
2.1.4.4 Mode Pengalamatan Register………. 17
2.1.4.5 Mode Pengalamatan Kode Tak Langsung………. 17
2.2 Sensor Posisi Motor………..…. 17
2.3 Driver Motor DC………... 18
2.4 Motor Arus Searah……… 21
2.4.1 Dasar Berputarnya Motor……….. 21
BAB III PERANCANGAN DAN REALISASI ALAT 3.1 Rancangan Perangkat Keras……….. 24
3.1.1 Rangkaian Sensor Posisi………. 25
3.1.2 Komponen Mikrokontroller AT89S51……… 26
3.1.2.1 Realisasi Komponen Mikrokontroller……… 26
3.1.2.2 Driver Motor DC……… 29
3.1.3 Komponen Catu Daya………. 30
3.1.4 Perancangan Casing Dan Screen Rolling ………... 32
3.2 Perancangan Perangkat Lunak……….………. 34
3.2.1 Pemrograman Mikrokontroller………... 35
BAB IV PENGUJIAN ALAT
4.1 Pengujian Pencacahan Sensor Posisi....……… 37 4.2 Data Hasil Pengujian Pengukuran Selisih Slide Gambar Pada Alat... 38
BAB V KESIMPULAN
Kesimpulan Dan Saran...…..………. 40
DAFTAR PUSTAKA
DAFTAR TABEL
Tabel 2.1 Register Timer Control (TCON)…...………. 13
Tabel 2.2 Fungsi Bit-Bit Pada Register TCON……….. 13
Tabel 2.3 Register Timer Mode Control (TMOD).……… 14
Tabel 2.4 Fungsi Bit-Bit Pada Register TMOD………. 14
Tabel 2.5 Bit Pengatur Mode Timer/ Counter………...………. 15
Tabel 2.6 Tabel Kebenaran Dari IC L293……….. 20
Tabel 3.1 Tabel Cara Kerja Driver Motor H-Bridge……….. 30
Tabel 4.1 Pengukuran Selisih Slide Gambar Pertama...………… 38
Tabel 4.2 Pengukuran Selisih Slide Gambar Kedua... 38
Tabel 4.3 Pengukuran Selisih Slide Gambar Ketiga... 39
DAFTAR GAMBAR
Gambar 2.1 Susunan Kaki-Kaki Mikrokontroller AT89S51………. 5
Gambar 2.2 Diagram Blok Arsitektur Mikrokontroler AT89S51………….. 8
Gambar 2.3 Optocoupler... 18
Gambar 2.4 H-Bridge... 19
Gambar 2.5 Motor DC (a) Searah Jarum Jam... (b) Berlawanan Arah Jarum Jam ... 19
Gambar 2.6 Blok Diagram Internal L293 Driver Motor……… 20
Gambar 2.7 Penghantar Berarus Listrik Berada Di dalam Medan Magnet... 21
Gambar 2.8 Bangunan Motor Arus Searah……… 22
Gambar 2.9 Bentuk Fisik Motor Arus Searah (DC) dan Pemasangan Terminal Positif dan Negatif……….. 23
Gambar 3.1 Diagram Kerja Rancangan Alat………. 24
Gambar 3.2 Sensor Posisi………... 25
Gambar 3.3 Skema Lengkap Rangkaian Rolling Reklame……… 27
Gambar 3.4 Rangkaian Mikrokontroller Pada Papan PCB……… 28
Gambar 3.5 Rangkaian Driver Motor DC (H-Bridge)………...………. 29
Gambar 3.6 Rangkaian Regulator 12 Dan 5 Volt Realisasi Catu Daya……. 31
Gambar 3.7 Skematik Frame Rolling Reklame……….. 32
Gambar 3.8 Skematik Screen Rolling Reklame...………. 33
Gambar 3.9 Realisasi Frame Rolling Reklame...………. 34
BAB I
PENDAHULUAN
1.1 Latar Belakang
Promosi merupakan salah satu kegiatan yang sering digunakan oleh perusahaan untuk mengadakan komunikasi dengan pasarnya. Promosi juga sering dikatakan sebagai “Proses Berlanjut”, karena dapat menimbulkan rangkaian kegiatan selanjutnya dari perusahaan. Oleh karena itu promosi dipandang sebagai: “Arus informasi atau persuasi satu arah yang dibuat untuk mengarahkan seseorang atau organisasi untuk menciptakan pertukaran dalam pemasaran”, salah satunya media iklan reklame.
Media iklan merupakan sarana informasi untuk memperkenalkan suatu produk kepada khalayak umum. Salah satu yang sering kita jumpai papan reklame atau billboard di jalan-jalan maupun di pertokoan. Billboard-billboard tersebut sangat berperan penting di masyarakat, karena dengan iklan yang gencar, diimages masyarakat, bahwa produk tersebut memiliki kualitas yang baik.
Oleh karena itu Penulis memilih judul “ Pengendalian Motor DC Pada Billboard Berbasis Mikrokontroller AT89S51”. Dengan alat billboard screen rolling ini, maka iklan yang ditampilkan tidak monoton/ statis, seperti iklan-iklan yang suka dipajang atau ditempel di tembok pertokoan, terutama di indoor. Dengan alat ini diharapkan Penguna tidak perlu repot-repot untuk menggeser atau menempel pada dinding, dan selain tampilannya menjadi menarik, juga dapat mengiklankan pada satu tempat, yaitu empat slide gambar iklan sehingga tidak banyak memakan tempat.
Alat ini berbasis mikrokontroller AT89S51, Outputnya berguna untuk mengendalikan dua buah motor DC, dengan sistem kerja pada motor bergantian, yaitu yang satu berputar dan satunya lagi loss, begitu sebaliknya. Pergerakan memutar motor pertama yaitu menggulung screen dari bawah ke atas, setiap
perputaran akan mendisplay atau menampilkan satu slide gambar iklan selama lebih kurang satu menit, kemudian motor DC akan memutar kembali ke slide gambar berikutnya, begitu seterusnya sampai empat kali tampil/ pendisplay-an. Jika sudah selesai maka motor kedua akan bergerak dari atas ke bawah, dan juga seperti sebelumnya akan mendisplay slide gambar iklan tadi.
1.2 Pembatasan Masalah
Dari keseluruhan perancangan sistem ini Penulis akan membahas tentang cara kerja rangkaian pengendalian motor DC pada billboard berbasis mikrokontroller AT89S51.
1.3 Tujuan Penelitian
Tujuan dari Penulis dan pembuatan Tugas Akhir adalah :
1. Membuat alat billboard screen saver, dengan display berukuran 50 cm x 40 cm, memiliki empat slide gambar dan tiap satu frame rolling reklame mendisplay/ menampilkan satu slide gambar saja.
2. Screen/ layar slide gambar bekerja sesuai pergerakan sensor posisi dan screen berjalan setiap slidenya, berhenti untuk slide gambar selanjutnya, kemudian screen berbalik arah dari atas ke bawah atau dari bawah ke atas. 3. Menjelaskan prinsip kerja rangkaian-rangkaian yang mendukung dalam
perancangan sistem Pengendalian Motor DC Pada Billboard Berbasis Mikrokontroller AT89S51.
1.4 Metodologi Penelitian
Metode yang digunakan pada penulisan Tugas Akhir ini adalah : 1. Metode Study Literatur
Metode ini dilakukan dengan cara mempelajari dan berusaha memahami buku-buku literature, laporan-laporan, pencarian di internet dan bentuk penulisan lain yang berhubungan dengan penulisan ini.
2. Perancangan dan Pembuatan Alat
Metode ini merupakan tahap awal dalam pembuatan alat dan tindak lanjut dari tahap perancangan, yaitu untuk merealisasikan alat sesuai dengan tujuannya.
1.5 Sistematika Penulisan
Untuk memudahkan pembahasan, sistematika penulisan dibagi atas beberapa bab. Adapun sistematika penulisan tersebut sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisi latar belakang, tujuan penulisan, pokok pembahasan, metode penulisan dan sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini berisi teori dasar yang berhubungan dengan perancangan, antara lain : mengenai mikrokontroller AT89S51, sensor posisi, driver motor DC, motor DC dan penjelasan komponen pendukung lainnya.
BAB III PERANCANGAN DAN REALISASI ALAT
Bab ini membahas mengenai rangkaian lengkap dengan implementasi rangkaian ke PCB serta perangkat lunak.
BAB IV PENGUJIAN ALAT
Bab ini berisi data pengujian alat, pengujian sistem serta pengambilan data pengukuran dari sistem yang telah dijalankan.
BAB V KESIMPULAN
Bab ini berisi kesimpulan dari keseluruhan bab yang dibahas dan saran-saran.
BAB II
LANDASAN TEORI
2.1 Mikrokontroller AT89S51
2.1.1 Arsitektur Mikrokontroller AT89S51
Mikrokontroller AT89S51 yang sesuai dengan bahasa pemrograman MCS-51 menggunakan Flash Programable Erasable Read Only Memory (Flash PEROM) yang mempunyai banyak kepraktisan sehingga penghapusan data dapat dilakukan secara cepat dan serentak (tidak Byte per-Byte seperti pada EPROM) dengan menggunakan energi listrik (secara elektris).
Mikrokontroller AT89S51 memiliki karakteristik-karakteristik yang sangat menguntungkan dan memudahkan perancang dalam membuat suatu instrument ukur ataupun instrument kendali, berikut karakteristik-karakteristik yang dimiliki oleh AT89S51 :
1. CPU 8 bit yang dioptimasi untuk aplikasi instrument kendali dan ukur. 2. 8 KBytes Flash PEROM.
3. Tahan 1000 kali pengulangan penulisan dan penghapusan.
4. Operasi statis secara penuh antara 0 Hz sampai 24 MHz untuk kode 24AC, 24JC, 24PC, 24SC.
5. Memiliki 256 x 8 bit memori internal (RAM).
6. Memiliki 32 jalur input/ output yang dapat diprogram. 7. Memiliki 2 buah timer 16 bit timer/ counter. 8. Mempunyai 5 sumber interupsi.
9. Memiliki serial port yang dapat diprogram. 10. Memiliki mode Low Power Idle dan Power Down. 11. Sesuai dengan bahasa pemrograman MCS-51. 12. Memiliki sistem penguncian memori.
Dengan karakteristik-karakteristik tersebut, menjadikan pembuatan suatu sistem menjadi lebih sederhana, baik dalam proses perancangan perangakat keras maupun perangkat lunak.
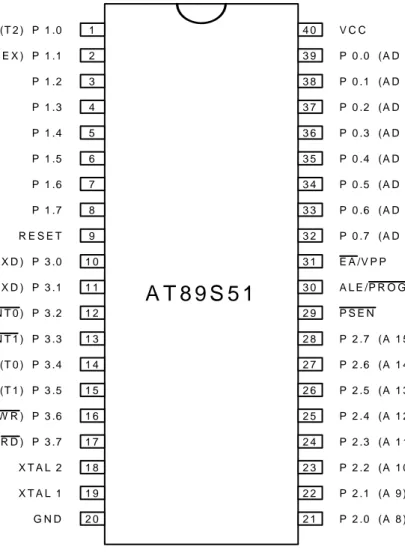
Mikrokontroller AT89S51 adalah salah satu anggota dari keluarga mikrokontroller MCS-51 yang memiliki 4 KByte Flash PEROM yang dikemas dalam paket 40 pin dengan satu daya tunggal. Berikut diagram susunan kaki dan symbol logika dari mikrokontroller AT89S51 :
Gambar 2.1 Susunan Kaki-Kaki Mikrokontroller AT89S51
A T 8 9 S 5 1
6 7 8 9 1 0 1 1 1 2 1 3 1 4 5 4 3 2 1 1 5 1 6 1 7 1 8 1 9 2 0 2 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 2 9 3 0 3 1 3 2 3 3 3 4 3 5 3 6 3 7 3 8 3 9 4 0 (T 2 ) P 1 .0 (T 2 E X ) P 1 .1 P 1 .2 P 1 .3 P 1 .4 P 1 .5 P 1 .6 P 1 .7 R E S E T (R X D ) P 3 .0 (T X D ) P 3 .1 ( IN T 0 ) P 3 .2 ( IN T 1 ) P 3 .3 (T 0 ) P 3 .4 (T 1 ) P 3 .5 (W R ) P 3 .6 (R D ) P 3 .7 X T A L 2 X T A L 1 G N D P 2 .0 (A 8 ) P 2 .1 (A 9 ) P 2 .2 (A 1 0 ) P 2 .3 (A 1 1 ) P 2 .4 (A 1 2 ) P 2 .5 (A 1 3 ) P 2 .6 (A 1 4 ) P 2 .7 (A 1 5 ) P S E N A L E /P R O G E A /V P P P 0 .7 (A D 7 ) P 0 .6 (A D 6 ) P 0 .5 (A D 5 ) P 0 .4 (A D 4 ) P 0 .3 (A D 3 ) P 0 .2 (A D 2 ) P 0 .1 (A D 1 ) V C C P 0 .0 (A D 0 )Berikut adalah penjelasan dan fungsi dari masing-masing kaki dari mikrokontroller AT89S51 :
1. Vcc (pin 40)
Catu daya + 5 Volt DC
2. GND (pin 20) Ground (GND)
3. Port 0 (pin 32 - 39)
Port 0 merupakan port I/O 8 bit yang bersifat bidireksional. Masing-masing pin/ kaki dapat dihubungkan secara langsung dengan 8 input TTL. Port ini juga dapat dikonfigurasikan sebagai jalur (bus) alamat/ data Byte rendah (low Byte) selama pengaksesan data dan program eksternal. Masing-masing kaki diberi nama P0.0/ AD0, P0.1/ AD1,….., P0.7/ AD7.
4. Port 1 (pin 1 - 8)
Port 1 merupakan port I/O 8 bit yang bersifat bidireksional yang dilengkapi dengan pull-up internal. Masing-masing kaki diberi nama P1.1, P1.2, ….., P1.7 yang digunakan berhubungan dengan peralatan luar dan tidak memiliki fungsi khusus.
5. Port 2 (pin 21 - 28)
Port 2 merupakan port I/O 8 bit yang bersifat bidireksional yang dilengkapi dengan pull-up internal. Port ini juga dapat dikonfigurasikan sebagai jalur (bus) alamat/ data Byte tinggi (high Byte) selama pengaksesan data dan program eksternal. Masing-masing kaki diberi nama P2.0, P2.1,….., P2.7.
6. Port 3 (pin 10 - 17)
Selain berfungsi sebagai port I/O yang berfungsi umum, masing-masing kaki pada port 3 juga mempunyai fungsi-fungsi yang bersifat lebih khusus.
Berikut fungsi-fungsi khusus yang dimiliki oleh masing-masing pin yang terdapat pada port 3 :
- RXD (P3.0) : Masukan data serial. - TXD (P3.1) : Keluaran data serial.
- INT0 (P3.2) : Masukan interupsi 0 dari luar. - INT1 (P3.3) : Masukan interupsi 1 dari luar. - T0 (P3.4) : Masukan ke timer/ counter 0. - T1 (P3.5) : Masukan ke timer/ counter 1. - WR (P3.6) : Sinyal tulis memori eksternal. - RD (P3.7) : Sinyal baca memori eksternal.
7. RST (pin 9)
Pin RST digunakan sebagai masuk reset yang aktif tinggi yang akan
mereset mikrokontroller AT89S51, ketika sinyal tinggi diberikan selama lebih dari dua siklus mesin. Setelah terjadi reset, jalur program pada mikrokontroller akan kembali ke alamat awal program.
8. ALE/PROG (Address latch Enable) (pin 30)
Pin ALE/PROG digunakan untuk menahan alamat Byte rendah (low Byte address) selama mengakses memori eksternal. Selain hal tersebut pin
ALE/PROG juga digunakan untuk memasukan pulsa program selama pemrograman Flash PEROM.
9. PSEN (Program Store Enable) (pin 29)
Program Store Enable (PSEN) merupakan suatu sinyal output yang
digunakan untuk mengendalikan memori program eksternal (EPROM eksternal). PSEN biasanya dihubungkan dengan pin Output Enable (OE) dari suatu EPROM eksternal untuk mengijinkan program memori eksternal masuk ke dalam bus selama proses pemberian atau pengembalian instruksi (fetching).
10. EA/Vpp (External Access Enable) (pin 31)
Pin EA (External Access Enable) merupakan suatu pin yang digunakan
untuk memilih apakah mikrokontroller akan menggunakan memori program internal atau eksternal. Untuk mengakses memori program internal maka pin EA harus dihubungkan dengan Vcc +5 VoltDC, sedangkan untuk mengakses memori program eksternal, maka pin ini harus dihubungkan dengan ground (GND).
11. XTAL1 (pin 18)
Pin XTAL1 digunakan sebagai pin masukan rangkaian osilator internal.
Sebuah osilator kristal atau sumber osilator luar dapat digunakan.
12. XTAL2 (pin 19)
Pin XTAL2 digunakan sebagai keluaran rangkaian osilator internal. Pin
ini dipakai bila menggunakan osilator kristal.
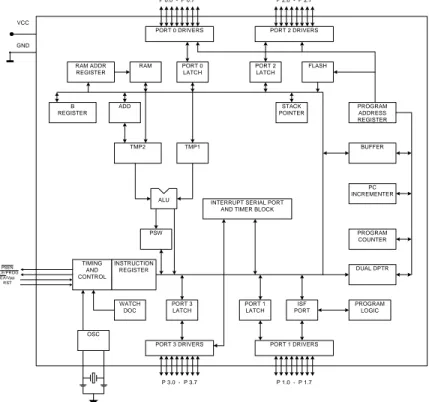
Gambar 2.2 Diagram Blok Arsitektur Mikrokontroller AT89S51
PORT 0 DRIVERS PORT 2 DRIVERS
PORT 0 LATCH RAM PORT 2 LATCH FLASH RAM ADDR REGISTER B REGISTER ADD STACK POINTER PROGRAM ADDRESS REGISTER TMP2 TMP1 BUFFER PC INCREMENTER INTERRUPT SERIAL PORT
AND TIMER BLOCK
PSW PROGRAM COUNTER DUAL DPTR TIMING AND CONTROL INSTRUCTION REGISTER WATCH DOC OSC PORT 3 LATCH PORT 1 LATCH ISF PORT PROGRAM LOGIC PORT 1 DRIVERS PORT 3 DRIVERS ALU VCC GND P 0.0 - P 0.7 P 2.0 - P 2.7 P 3.0 - P 3.7 P 1.0 - P 1.7 PSEN ALE/PROG EA/Vpp RST
Berikut penjelasan dari tiap-tiap blok yang terdapat pada diagram di atas : 2.1.1.1 Instruction Dekoder
Berfungsi sebagai penerjemah program yang telah dibaca, serta mengendalikan sumber dan tujuan dari data seperti pada operasi fungsi dari
Arithmatic Logic Unit (ALU).
2.1.1.2 Program Counter (PC) dan Data Pointer (DPTR)
Register Program Counter (PC) merupakan register 16 bit yang digunakan untuk mengamati lokasi instruksi program yang tersimpan di dalam ROM. Register Data Pointer (DPTR) adalah register 16 bit yang terbagi atas register DPH (Data Pointer High Order Byte) dan DPL (Data pointer Lower Byte). DPTR digunakan untuk pengalamatan register tak langsung untuk memindahkan isi memori program, memindahkan variable data dari atau ke luar memori data eksternal, dalam hal ini RAM eksternal, serta digunakan untuk percabangan alamat memori program sampai 64 KByte.
2.1.1.3 Register A dan B
Register A merupakan Akumulator yang digunakan untuk berbagai operasi termasuk operasi aritmatika maupun logika. Sedangkan Register B digunakan untuk membantu Register A dalam operasi perkalian dan permbagian.
2.1.1.4 Register Program Status Word (PSW)
Register Program Status Word (PSW) terdiri atas 4 flags yang dipakai secara otomatis pada operasi matematika yaitu carry flag (CY), auxiliary carry (AC), parity (P) dan userflag (F0) yang digunakan untuk keperluan umum. Sedangkan RS0 dan RS1 digunakan untuk memilih register bank. Tiap-tiap flag yang terdapat pada register PSW tersebut merupakan register yang dapat dialamati setiap bit (bit addressable).
2.1.1.5 RAM Internal (Internal RAM)
RAM internal yang dimiliki oleh mikrokontroller AT89S51 berkapasitas 256 Byte yang terdiri dari dua bagian yaitu upper 128 Byte menempati ruang alamat yang paralel dengan Special Function Register (SFR). Walaupun upper 128 Byte memiliki alamat yang sama dengan Special Function Register (SFR), namun secara fisik terpisah. Sedangkan bagian lower 128 Byte memiliki konfigurasi yang sama dengan konfigurasi RAM pada mikrokontroller AT89S51 yang terdiri dari 3 bagian yang berbeda yaitu :
• Alamat 00H - 1FH merupakan daerah memori yang membentuk 32 register yang terbagi dalam 4 bank yaitu bank 1, bank 2, bank 3 dan bank 4 yang masing-masing memiliki 8 buah register yaitu R0 sampai R7. • Alamat 20H - 2FH merupakan daerah memori yang dapat dialamati secara
bit.
• Alamat 30H - 7FH merupakan daerah memori yang digunakan secara umum dan hanya dialamati secara Byte.
2.1.1.6 ROM Internal (Internal ROM )
Mikrokontroller AT89S51 memiliki ROM internal yang berkapasitas 8 KByte yang menempati alamat 0000H - 1FFFH. Bila menggunakan ROM eksternal, maka dapat dipilih apakah total instruksi pada ROM internal saja atau gabungan internal dan eksternal, atau hanya ROM eksternal saja.
2.1.1.7 Stack Pointer (SP)
Register Stack Pointer (SP) berfungsi untuk menunjuk ke suatu alamat RAM internal yang berhubungan dengan operasi menyimpan dan mengambil data secara cepat atau digunakan untuk menahan alamat RAM internal yang disebut
2.1.1.8 Special Function Register (SFR)
Special Function Register (SFR) merupakan register khusus yang
menangai beberapa perantaraan CPU dan piranti di sekeliling mikrokontroller. 2.1.1.9 Port 0, Port 1, Port 2, dan Port 3
Keempat buat port yang dimiliki oleh mikrokontroller AT89S51 menyediakan 32 jalur I/O yang masing-masing jalur digunakan untuk perantaraan dengan piranti yang berada di luar mikrokontroller.
2.1.2 Organisasi Memori
Semua mikrokontroller keluarga MCS-51 memiliki pembagian ruang alamat untuk memori program dan memori data. Pemisahan memori program dengan memori data tersebut membolehkan memori data untuk diakses oleh alamat 8 bit.
Mikrokontroller AT89S51 memiliki memori program yang terpisah dengan dari data. Kapasitas memori program internal sebanyak 4 KByte yaitu dari alamat 0000H – 0FFFH. Namun memori program AT89S51 ini dapat ditingkatkan sampai 64 KByte dengan menggunakan memori program eksternal. Pembatasan alamat sampai 64 KByte ini disebabkan karena mikrokontroller AT89S51 hanya memiliki 16 jalur alamat (216 = 65536 Byte). Mikrokontroller AT89S51 juga memiliki memori data internal yang disebut sebagai RAM internal, ruang memori data dibagi menjadi tiga blok, yaitu bagian rendah 128 Byte (lower 128 Byte), bagian tinggi 128 Byte (upper 128 Byte), dan SFR (Special Function Register).
2.1.3 Fasilitas Mikrokontroller AT89S51 2.1.3.1 Port Input/Output
Mikrokontroller AT89S51 mempunyai port input/ output (I/O) paralel sebanyak 4 buah. Masing-masing port memiliki lebar jalur 1 Byte (8 bit) yang bersifat bidireksional.
2.1.3.2 Perwaktu CPU
Mikrokontroller jenis AT89S51 memiliki osilator internal
(on-chiposilator) yang dapat digunakan sebagai sumber clock bagi CPU. Untuk
menggunakan osilator internal diperlukan sebuah osilator kristal yang dipasang pada pin XTAL1 dan pin XTAL2 dan 2 buah kapasitor yang menghubungkan kaki osilator kristal ke ground (GND). Untuk osilator kristal dapat digunakan frekuensi dari 0 sampai 24 MHz, sedangkan untuk kapasitor dapat bernilai antara 27 pF sampai 33pF.
2.1.3.3 Port Serial
Mikrokontroller jenis AT89S51 juga dilengkapi dengan port serial. Port serial ini berfungsi untuk pengiriman data dalam bentuk atau format serial. Apabila hendak menghubungkan dengan sebuah PC (Personal Computer) melalui port serial, level tegangan TTL harus diubah menjadi level tegangan RS 232. Untuk keperluan ini dapat digunakan IC MAX 232. Port serial dalam mikrokontroller AT89S51 memiliki sifat Fullduplex, yang berarti dapat melakukan komunikasi secara dua arah dalam waktu yang bersamaan. Register penerima dan pengirim pada port serial diakses pada SBUF (Serial Buffer). Sedangkan bit-bit status akan menunjukkan akhir dari suatu pengiriman atau penerimaan data.
2.1.3.4 Timer/ Counter
Mikrokontroller AT89S51 memiliki tiga buah timer/ counter 16 bit yaitu timer/ Counter 0, 1 dan 2 yang dapat digunakan sebagai perhitungan jumlah pulsa,
penghitung lebar pulsa, periode dan frekuensi . Selain hal tersebut timer/ counter 16 bit yang dimiliki oleh mikrokontroller AT89S51 juga dapat digunakan untuk membangkitkan pulsa dengan frekuensi tertentu untuk keperluan interupsi atau penentuan laju pengiriman data secara serial. Timer/ counter yang diaktifkan pada frekuensi kerja mikrokontroller 12 MHz akan memiliki 1 priode waktu perhitungan sebesar 11 detik atau
12
sama dengan satu pelaksanaan perintah atau instruksi. Periode waktu timer/ counter secara umum ditentukan oleh persamaan berikut :
• Sebagai timer/ counter 8 bit :
T = (255-TLx) X 1 periode waktu timer/ counter
Tlx adalah ini register TL0 atau TL1 • Sebagai timer/ counter 16 bit :
T = (65535 – THx TLx) X 1 periode waktu timer/ counter
THx adalah isi register TH0 atau TH1
TLx adalah ini register TL0 atau TL1
Hasil pencacahan suatu timer/ counter akan disimpan pada register TLx dan THx. Untuk timer/ counter 0 dan 1 tersebut dikendalikan oleh register Timer
Mode Control (TMOD) dan Timer Control (TCON), sedangkan untuk timer counter 2 dikendalikan oleh register timer 2 Control (T2CON) dan
register-register capture yaitu RCAP2L dan RCAP2H. Adapun susunan dan definisi dari bit-bit pada TCON dan TMOD adalah sebagai berikut :
Tabel 2.1 Register Timer Control (TCON)
MSB LSB
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
Keterangan dari bit-bit register TCON di atas adalah sebagai berikut :
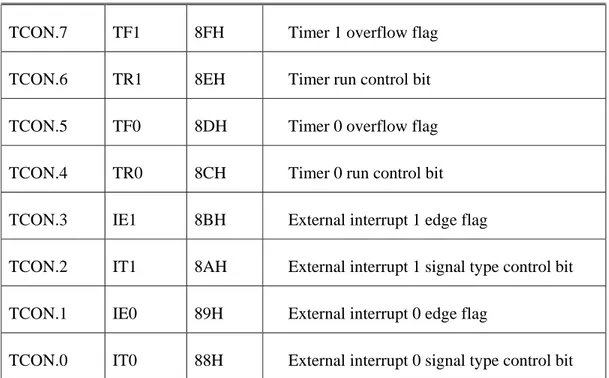
Tabel 2.2 Fungsi Bit-Bit Pada Register TCON
TCON.7 TF1 8FH Timer 1 overflow flag
TCON.6 TR1 8EH Timer run control bit
TCON.5 TF0 8DH Timer 0 overflow flag
TCON.4 TR0 8CH Timer 0 run control bit
TCON.3 IE1 8BH External interrupt 1 edge flag
TCON.2 IT1 8AH External interrupt 1 signal type control bit
TCON.1 IE0 89H External interrupt 0 edge flag
TCON.0 IT0 88H External interrupt 0 signal type control bit
Tabel 2.3 Register Timer Mode Control (TMOD)
MSB LSB
GATE C/_T M1 M0 GATE M1 M0 C/_T
Timer Counter1 Timer/ Counter 0
Keterangan dari bit-bit register TMOD di atas adalah sebagai berikut :
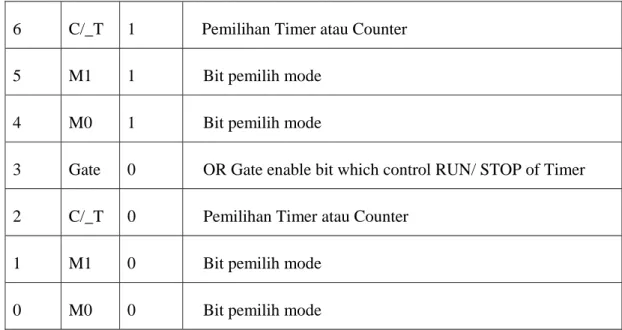
Tabel 2.4 Fungsi Bit-Bit Pada Register TMOD
Bit Nama Timer Keterangan
6 C/_T 1 Pemilihan Timer atau Counter
5 M1 1 Bit pemilih mode
4 M0 1 Bit pemilih mode
3 Gate 0 OR Gate enable bit which control RUN/ STOP of Timer
2 C/_T 0 Pemilihan Timer atau Counter
1 M1 0 Bit pemilih mode
0 M0 0 Bit pemilih mode
Mode dari Timer/ Counter 1 diatur pada bit 4 dan 5, sedangkan timer/ Counter 0
diatur pada bit 0 dan 1. Kombinasi dari M1 dan M0 akan menentukan mode kerja dari timer/ counter 0 dan 1 dari mikrokontroller.
Berikut kombinasi dari bit M1 dan M0 yang terdapat pada register TMOD
Tabel 2.5 Bit Pengatur Mode Timer/ Counter
M1 M0 Mode Keterangan
0 0 0 Timer/ Counter mode 13 bit
0 1 1 Timer/ Counter mode 16 bit
1 0 2 Timer/ Counter 8 bit
Timer/ Counter akan berfungsi sebagai pencacah (counter) jika sumber detak
berasal dari luar dan sebagai pewaktu (timer) apabila sumber detak berasal dari osilator internal. Masukan dari sumber luar atau dari osilator internal ditentukan oleh bit C/_T. Jika sumber detak menggunakan osilator internal maka bit C/_T diset “0” , namun jika sumber detak berasal dari luar maka bit C/_T diset “1”. Pencacah dapat diaktifkan dengan menset “1” bit TR0 dan TR1, sedangkan untuk menghentikan pencacahan dilakukan dengan menset “0” bit TR0 dan TR1.
2.1.3.5 Reset
Reset merupakan interupsi istimewa karena program tidak dapat menghalangi aksi pin RST (pin 9) bila diaktifkan, dimana instruksi program harus melompat ke alamat awal program dan akan menjalankan program dari alamat awal tersebut. Untuk mereset mikrokontroller AT89S51, pin RST harus ditahan
pada logika tinggi selama lebih dari dua siklus mesin.
2.1.4 Mode Pengalamatan MCS-51
Data bisa berada di tempat yang berbeda sehingga dikenal beberapa cara untuk mengakses data tersebut yang dinamakan sebagai mode pengalamatan (addressing mode ) antara lain :
2.1.4.1 Mode Pengalamatan Segera (Immediate Addressing Mode)
Cara ini menggunakan konstanta, missal : MOV A#20H. Data konstan merupakan data yang menyatu dengan instruksi, contoh instruksi tersebut mempunyai arti bahwa data konstanta 20H, (sebagai data konstan harus diawali dengan “#”) disalin ke Akumulator A.
2.1.4.2 Mode Pengalamatan Langsung (Dirrect Addressing Mode)
Cara ini dipakai untuk menunjuk data yang berada disuatu lokasi memori dengan cara menyebut lokasi (alamat) memori tempat data tersebut berada misal :
MOV A,30H. instruksi ini mempunyai arti bahwa data pada memori dengan lokasi 30H disalin ke Akumulator A.
2.1.4.3 Mode Pengalamatan Tidak Langsung (Indirect Addresing Mode) Cara ini dipakai untuk mengakses data di dalam memori, tetapi lokasi memori tidak disebut secara langsung, namun dititipkan pada register lain, misal : MOV A,@R0. Dalam instruksi tersebut register serba guna R0 dipakai untuk menyimpan lokasi memori, sehingga instruksi ini mempunyai arti memori data yang alamat lokasinya tersimpan dalam R0 isinya disalin ke Akumulator A.
2.1.4.4 Mode Pengalamatan Register (Register Addressing Mode)
Misal : MOV A,R5 , instruksi ini mempunyai arti bahwa data dalam register serba guna R5 disalin ke Akumulator A. Instruksi ini menjadikan register serba guna R0 sampai R7 sebagai tempat penyimpanan data yang praktis dan kerjanya sangat cepat.
2.1.4.5 Mode Pengalamatan Kode Tak Langsung (Code Indirect address in Mode)
Untuk keperluan ini, MCS-51 mempunyai cara penyebutan data dalam memori program yang dilakukan secara tidak langsung, misalnya : MOVC A,@ + DPTR. Dalam instruksi tersebut instruksi MOV diganti dengan MOVC, tambahan MOVC tersebut dimaksudkan untuk membedakan bahwa instruksi ini digunakan untuk memori program (MOV tanpa huruf C digunakan untuk memori data).
2.2 Sensor Posisi Motor
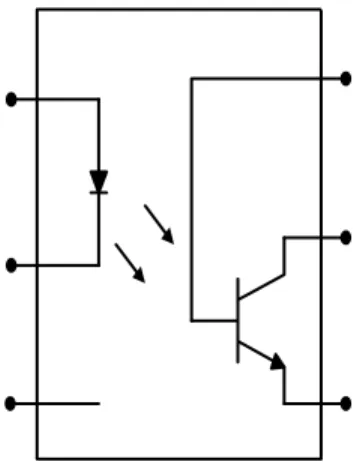
Sensor posisi ini menggunakan optocoupler yang berfungsi sebagai jembatan suatu rangkaian agar dari satu sistem dengan sistem lainnya tidak berhubungan langsung.
Optocoupler sendiri terdiri dari 2 bagian, yaitu transmitter (pengirim) dan receiver (penerima).
1. Transmitter, merupakan bagian yang terhubung dengan rangkaian input atau rangkaian kontrol. Pada bagian ini terdapat sebuah LED infra merah (IR LED) yang berfungsi untuk mengirimkan sinyal kepada receiver.
2. Receiver, merupakan bagian yang terhubung dengan rangkaian output atau rangkaian beban, dan berisi komponen penerima cahaya yang dipancarkan oleh transmitter. Komponen penerima cahaya ini dapat berupa photodioda ataupun phototransistor.
Gambar 2.3 Optocoupler
Pada alat ini optocoupler yang digunakan adalah opto type U, dimana antara dioda dan transistornya berhubungan melalui cahaya. Phototransistor ini akan bekerja/ aktif bila photodioda ini mengeluarkan cahaya, bila tidak maka collector - emitter mempunyai impedansi yang tinggi (seperti saklar yang membuka).
2.3 Driver Motor DC
Driver motor DC ini adalah penggerak motor yang mempunyai arus cukup besar sesuai dengan arus motor tersebut, inputnya cukup kecil sehingga bisa digerakan dari mikrokontroller. Driver motor ini ada yang searah/ hanya dapat menggerakan motor searah jarum jam saja dan ada juga yang bisa dua arah
1 2 3 6 5 4 PIN : 1. ANODE 2. CATHODE 3. NO CONNECTION 4. EMITTER 5. COLLECTOR 6. BASE
(memutar motor searah dan berlawanan jarum jam/ CW atau CCW). Sedangkan metode dua arah ini biasa disebut dengan H-Bridge.
H-Bridge adalah sebuah rangkaian dimana motor menjadi titik tengahnya dengan
dua jalur yang biasa dibuka tutup untuk melewatkan arus pada motor tersebut, persis seperti huruf ”H” (dengan motor berada pada garis horizontal).
Gambar 2.4 H-Bridge
(a) (b)
Gambar 2.5 Motor DC (a) Searah Jarum Jam dan (b) Berlawanan Arah Jarum Jam
Dua terminal motor a dan b dikontrol oleh 4 saklar (1 s/d 4). Ketika saklar satu
dan dua aktif (saklar 3 dan 4 dalam keadaan off), maka terminal motor a akan
mendapat tegangan (+) dan terminal b akan terhubung ke ground (-), hal ini menyebabkan motor bergerak maju (atau searah jarum jam).
M
1 a 4 3 2 b -+ POWER SUPPLAYM
1 + 4 3 2 -+ POWER SUPPLAYM
1 -4 3 2 + -+ POWER SUPPLAYSedangkan sebaliknya, bila saklar 1 dan 2 dalam keadaan off , saklar 3 dan 4 keadaan aktif, maka terminal a akan terhubung ke ground (-) dan terminal b akan
mendapat tegangan (+), dan tentunya hal ini dapat menyebakan motor berubah arah putarnya, menjadi bergerak mundur (atau berlawanan dengan arah jarum jam)
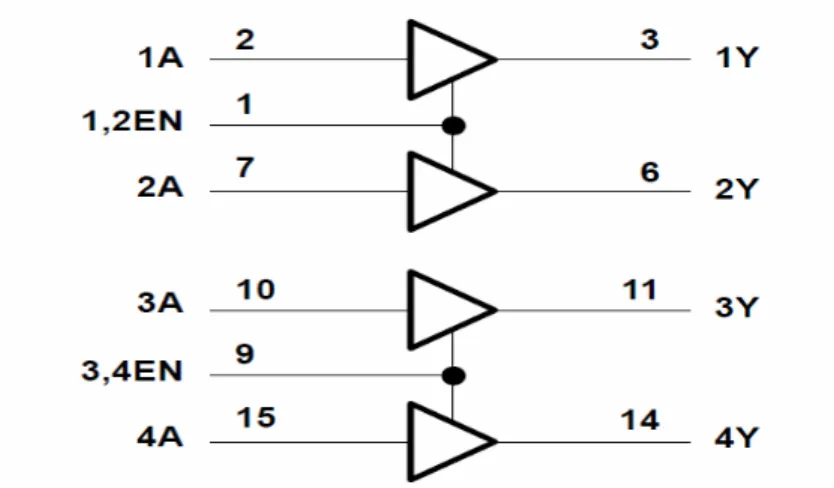
Pada perancangan ini menggunakan L293D dimana IC ini sudah terdiri dari 4 buah driver motor 1 arah atau 2 buah H-Bridge.
Gambar 2.6 Blok Diagram Internal L293 Driver Motor
Tabel 2.6 Tabel Kebenaran dari IC L293
INPUT OUTPUT A EN Y H H H L H L X L Z H = High L = Low X = High / Low
2.4 Motor Arus Searah
Motor adalah alat yang dapat merubah daya listrik menjadi gerakan mekanik.
Rangkaian motor ini terdiri dari dua bagian utama, yaitu :
a. Stator
Stator adalah bagian dari motor yang terluar. Stator berfungsi sebagai wadah dari motor bagian dalam, pada stator juga melekat magnet tetap sebagai penghasil medan magnet, cicin belah, sikat sebagai penghubung arus listrik dari sumber kepada rangkaian di dalamnya.
b. Rotor
Merupakan bagian motor yang berada di dalam dari motor, bagian ini yang berputar. Terdiri dari gulungan kawat berlapis (kawat email) yang disebut bagian jangkar (armatur), inti besi jangkar, dan komutator
2.4.1 Dasar Berputarnya Motor
Jika sebuah penghantar yang mengandung arus listrik berada di dalam magnet, maka kepada penghantar itu bekerjalah gaya, dan penghatarnya akan bergerak (seakan-akan ditendang).
Gambar 2.7 Penghantar Berarus Listrik Berada Di Dalam Medan Magnet
U
Gambar 2.7 memperlihatkan keadan medan magnet ketika diusik oleh keberadaan sepotong penghantar yang diberikan arus listrik. Arah arus yang mengaliri penghantar menuju ke luar (ditandai dengan titik), medan magnet hasil dari aliran arus pada sebuah penghantar digambarkan berlawanan arah jarum jam. Sedangkan arah aliran medan magnet dari magnet tetap digambarkan mengalir dari utara ke selatan.
Arah arus medan magnet dari penghantar berlawanan arah dengan aliran medan magnet yang berada sebelah kanan (lihat gambar 2.7), sehingga medan magnet di bagian kanan saling melemahkan. Sedangkan arah medan magnet yang disebelah kiri satu arah dengan medan magnet dari penghantar berarus, sehingga medan magnet saling menguatkan. Hasil dari keadaan ini adalah terdorongnya penghantar berarus oleh medan magnet terkuat ke arah medan magnet yang lebih lemah.
Dari dasar pengertian di atas akan memudahkan penjelasan cara kerja dari motor arus searah.
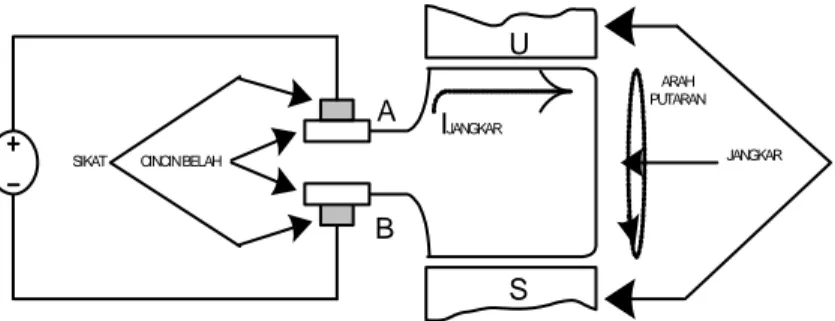
Gambar 2.8 Bangunan Motor Arus Searah
Gambar di atas memperlihatkan rancangan bangunan motor arus secara lengkap dengan tegangan sumbernya, gambar ini yang akan membuat lebih mudah dalam mempelajari cara kerja dari motor arus searah. Kejadian berputarnya jangkar diawali dengan mengalirnya arus listrik di dalam sebuah kawat penghantar, dalam hal ini adalah jangkar. Arus yang mengalir dari tegangan
DC
A B U S IJANGKAR JANGKAR ARAH PUTARAN MAGNET TETAP CINCIN BELAH SIKATsumber lalu ke titik A kemudian terus mengalir jangkar dan menghasilkan medan magnet disekitar penghantar, medan magnet akibat arus listrik ini mengusik medan magnet dari magnet tetap membuat jangkar beputar. Ketika berputar 900 , posisi titik A dan B bertukar (A di bawah dan B di atas) arus untuk yang kedua kalinya mengaliri penghantar dari B ke A (setelah bertukar tempat) akan tetapi arah mengalirnya tidak mengalami perubahan, kejadian ini terus berlanjut sampai dengan tegangan sumber dipadamkan. Dengan berdasarkan dengan arah aliran arus dan arah aliran medan magnet dari magnet tetap dapat diperkirakan arah putaran adalah seperti yang ditunjukkan oleh gambar 2.8
Gambar 2.9 Bentuk Fisik Motor Arus Searah (DC) Dan Pemasangan Terminal Positif dan Negatif
Motor DC yang digunakan pada umumnya mempunyai tegangan 5V, 12V, 24V dan 48V. Sedangkan motor arus searah (DC) yang digunakan untuk aplikasi industri umumnya mempunyai tegangan 90V, 180V dan 250V. Bentuk motor DC dengan gearbox dapat dilihat pada gambar 2.9
BAB III
PERANCANGAN DAN REALISASI ALAT
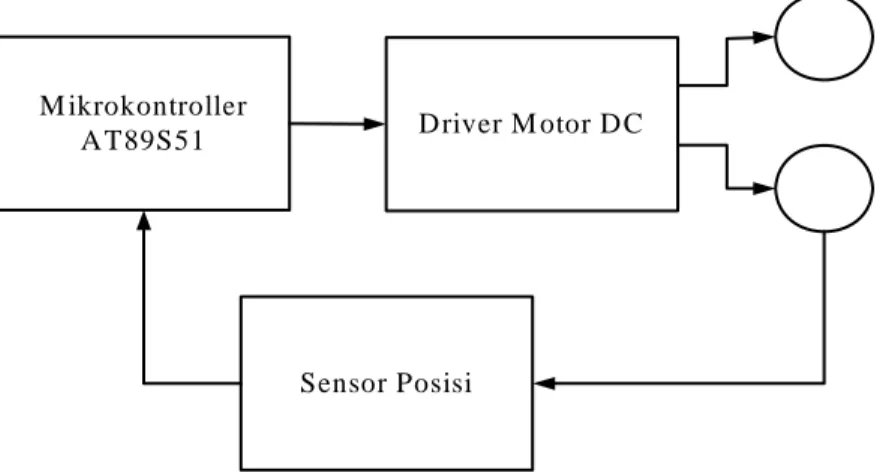
Perancangan sistem pengendalian motor DC ini terdiri dari dua bagian. Bagian pertama adalah perancangan perangkat keras yang menghubungkan Mikrokontroller, Driver Motor DC dan Sensor. Bagian kedua adalah perancangan perangkat lunak.
Secara garis besar diagram kerjanya dapat dilihat di bawah ini :
Gambar 3.1 Diagram Kerja Rancangan Alat
3.1 Rancangan Perangkat Keras
Ada beberapa komponen perangkat keras yang dirancang untuk pengaturan motor DC ini. Beberapa komponen yang dirancang diantaranya komponen mikrokontroller, sensor posisi dan driver motor DC (H-Bridge) serta komponen
catu daya . Sensor Posisi M ikrokontroller A T89S51 Driver M otor DC M otor Baw ah M otor A tas
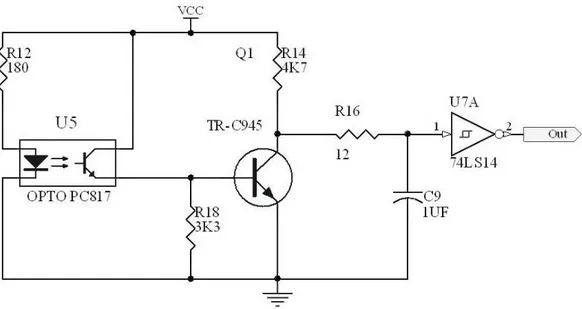
3.1.1 Rangkaian Sensor Posisi
Sensor yang dipakai pada perancangan alat ini menggunakan sensor cahaya infra red yang disebut dengan optocoupler. Pada transmitter cahaya digunakan dioda laser, dan receiver cahaya phototransistor. Sensor ini dipasang pada piringan yang dilubangi, dimana piringan sensor posisi tersebut terdiri dari delapan lubang. Bila sensor pada posisi piringan yang dilubangi maka cahaya infra akan menembus ke phototransistor sehingga nilai dari phototransistor akan berubah, seperti basis transistor mendapatkan tegangan.
Gambar 3.2 Sensor Posisi
Cara kerja dari sensor posisi ini yaitu apabila phototransistor menerima
cahaya dari dioda laser maka phototransistor berfungsi sebagai saklar tertutup (short circuit) yang mengalirkan arus Vcc, R14, Colector menuju Emitor (ground) dan oleh rangkaian schmit trigger di not, sehingga pada kaki P3.4 menerima logic “1”. Dan apabila photo transistor tidak menerima cahaya maka P3.4 menerima logic “0”. Selain itu fungsi dari IC shcmit trigger adalah bersama dengan R dan C
3.1.2 Komponen Mikrokontroler AT89S51
Mikrokontroller yang digunakan adalah AT89S51, mikrokontroller ini berfungsi sebagai interface antara sensor posisi dengan komponen H-Bridge
sebagai penggerak motor. Mikrokontroller akan mendeteksi sinyal dari bagian sensor secara terus menerus berupa data-data pulsa dari putaran motor .
Langkah-langkah perancangan komponen mikrokontroller adalah sebagai berikut:
1. Menghubungkan Port 3.4 milik AT89S51 yang berfungsi sebagai input
untuk sensor, dengan pin output pada sensor yang berfungsi sebagai output pulsa (sensor posisi).
2. Menghubungkan Port 0 mikrokontroller yang berfungsi sebagai driver 2 buah motor DC. Adapun pin-pin sebagai beriktu:
• Port 0.0 sebagai Enable Motor 1 • Port 0.1 sebagai Motor 1 (+) • Port 0.2 sebagai Motor 1 (–) • Port 0.3 sebagai Enable Motor 2 • Port 0.4 sebagai Motor 2 (+) • Port 0.5 sebagai Motor 2 (-)
3. Menghubungkan Catu daya 5VDC dengan pin 40 sebagai positif dan pin 20 sebagai ground.
3.1.2.1 Realisasi Komponen Mikrokontroller
Mikrokontroller menggunakan catu daya 5 Volt. Mikrokontroller dirancang sebagai ISP (In System Programming) sehingga jika ada perubahan pada algoritma, atau program pada mikrokontroller, maka dapat langsung diubah tanpa merubah sistem/ perangkat kerasnya.
Gambar 3.4 Rangkaian Mikrokontroler Pada Papan PCB
Pada sistem ini mikrokontroller merupakan jantung rangkaian dimana berfungsi sebagai :
Pada outputnya Port 0 menggerakan motor DC dan pada inputnya menerima data sensor posisi, sensor posisi inilah diproses oleh mikrokrontroller untuk menentukan kapan motor harus berhenti pada setiap slidenya.
3.1.2.2 Driver Motor DC (H-Bridge)
Gambar 3.5 Rangkaian Driver Motor DC (H-Bridge)
Rangkaian Driver Motor ini menggunakan IC L293 dimana terdapat 4 buah penguat/ driver yang digunakan untuk menggerakan motor atau relay, pada inputnya berlevel TTL sehingga dapat digerakan langsung oleh mikrokontroller. Untuk menggerakan motor agar dapat dijalankan berputar ke kiri dan ke kanan maka, diperlukan suatu teknik yaitu H-Bridge dimana pada outputnya yang
terhubung ke motor dapat ditukar polaritasnya, enable pada pin 1 untuk mengaktif atau non aktifkan keluaran Port 3 dan 6 sedangkan, enable pada pin 9 untuk
mengaktif atau non aktifkan keluaran Port 11 dan 14.
Lampu led digunakan hanya sebagai indicator pada saat outputnya yang bernilai tegangan positif, maka lednya akan menyala.
Tabel 3.1 Tabel Cara Kerja Driver Motor H-Bridge
INPUT ENABLE OUTPUT
2A 1A EN 1,2 2Y 1Y L L H L L L H H L H H L H H L H H H H H X X L Z Z
Dapat dilihat pada table di atas outpunya bisa berbalik polaritas sehingga bila dipandang motor, maka akan berputar ke kiri dan ke kanan.
3.1.3 Komponen Catu Daya
Catu daya digunakan untuk mengkonversi tegangan 220Vac dari PLN menjadi tegangan 5VDC yang dibutuhkan oleh komponen mikrokontroller. Catu daya ini dirancang dengan menggunakan transformator 220Vac/12Vac yang berarti transformator ini dapat mengubah tegangan primer 220Vac menjadi tegangan sekunder 12Vac. Selain itu, catu daya ini menggunakan jembatan dioda 1N4007 yang berguna sebagai penyearah gelombang penuh. Hasil dari penyearah gelombang penuh ini masih terlihat adanya gelombang, untuk menghilangkan gelombang ini digunakan kapasitor sebagai filter.
Secara teori, tegangan hasil keluaran kapasitor dapat digunakan untuk menyediakan tegangan ke rangkaian, tetapi kenyataannya tegangan yang dihasilkan tidak murni karena terdapat ripple. Akibat adanya ripple ini, tegangan keluaran kapasitor menjadi turun. Untuk menanggulangi hal tersebut, digunakan IC voltage regulator 7812. IC 7812 digunakan sebagai stabilisator yang
mengubah tegangan 15VDC menjadi 12VDC dan untuk menjaga agar hasil keluaran catu daya tetap stabil apabila terjadi perubahan pada tegangan primer atau beban. Dengan digunakannya IC 7812 pada rangkaian catu daya, tegangan keluaran yang
dihasilkan akan stabil dan tidak terganggu ripple. Tegangan 12VDC teregulasi inilah digunakan untuk supply motor sedangkan untuk mikrokontroller dibutuhkan 5VDC maka pada keluaran 12VDC ini dihubungkan lagi dengan IC 7805 agar mempunyai keluaran 5VDC. Inputnya dari transformator 1A, 12 Vac CT (Center Tap).
Agar lebih jelasnya dapat dilihat pada rangkaian regulator 12 dan 5 VoltDC dibawah ini:
Gambar 3.6 Rangkaian Regulator 12 dan 5 Volt Realisasi Catu Daya
Rancangan catu daya digunakan untuk memberikan tegangan kepada komponen mikrokontroller, komponen Sensor Posisi IC Driver Motor L293 5V dan Motor 12V.
Adapun realisasi catu daya adalah sebagai berikut:
1. Tegangan output 12 Vac dari trafo dihubungkan ke komponen sistem mikrokontroller yang dipakai. Setelah DC tegangan naik sampai 15V sehingga dibutuhkan IC 7812 agar keluarnya stabil 12VDC. Untuk mikrokontroller memerlukan 5VDC, maka digunakan IC 7805 pada sistem mikrokontroller agar tegangan stabil pada 5 V.
2. Komponen sensor posisi juga mendapatkan tegangan agar bisa beroperasi, tegangan yang dibutuhkan berkisar 5V.
3. Komponen driver motor juga mendapatkan tegangan agar bisa beroperasi. Tegangan yang dibutuhkan berkisar 5V pada pin 16 dan 12V untuk supply motor DC pada pin 8 Vcc2.
3.1.4 Perancangan Casing Dan Screen Rolling
• Dalam perancangan frame/ casing rolling ini memiliki ukuran sesuai gambar skematik di bawah ini. Ukurannya sebagai berikut :
Gambar 3.7 Skematik Frame Rolling Reklame
M M C A S IN G M O T O R S L ID E G A M B A R S C R E E N M E N G G U L U N G D I D A L A M B E S I R O L L IN G M O T O R SLIDE GAMBAR 8 Cm 8 Cm 57 Cm 65 Cm 5 Cm 40 Cm 50 Cm
• Untuk ukuran screen rollingnya sebagai berikut :
Gambar 3.8 Skematik Screen Rolling Reklame
SLIDE GAMBAR 1 SLIDE GAMBAR 2 SLIDE GAMBAR 3 SLIDE GAMBAR 4
{
{
{
{
{
0,5 Cm 0,5 Cm 3 Cm 3 Cm 3 Cm 3 Cm 3 Cm• Untuk realisasi rancangan alat tersebut sebagai berikut :
Bagian Depan Bagian Belakang
Isi Bagian Belakang Letak Sensor Posisi
Gambar 3.9 Realisasi Frame Rolling Reklame
3.2 Perancangan Perangkat Lunak
Pada perangkat lunak komponen perangkat yang dirancang untuk menggerakan motor dan membaca posisinya. Pemograman mikrokontroller ini
bertujuan agar mikro dapat bekerja untuk mengatur jalannya perangkat keras yang dirancang agar bisa bekerja sesuai dengan yang dirancangkan.
3.2.1 Pemrograman Mikrokontroller
Pemrograman mikrokontroller ini menggunakan bahasa assembler di dalamnya. Diagram Flowchart : In is ia lis a s i P o rt M e m o ri S lid e In is ia la s i T im e r 0 M e m a tik a n (E n a b le = 0 ) K e d u a M o to r (A ta s d a n B a w a h ) T o m b o l D o w n = 0 M o to r D o w n A k tif Y T o m b o l S ta rt = 0 N R o llin g ke A ta s / M o to r U p A k tif In p u t = 0 N J u m la h N a ik + 1 J u m la h N a ik = S lid e 2 S to p M o to r U p D e la y J u m la h N a ik = S lid e 3 J u m la h N a ik = S lid e 4 S to p M o to r U p D e la y S to p M o to r U p D e la y P ro g ra m D o w n
• Cara kerja program sebagai berikut:
Mikro dinyalakan, maka akan menunggu tombol start atau tombol down motor. Bila start ditekan maka motor up akan aktif dan terus rolling pada saat itu sensor mulai bekerja menghitung banyaknya putaran.
• Alurnya sebagai berikut :
1. Mikro dinyalakan, inisialisasi mikro, driver motor dan penamaan Port serta inisialisasi memori dan timer.
2. Mikro mengirim perintah untuk membaca menjalankan motor up.
3. Mikro mengirim perintah untuk membaca sensor posisi lalu membuat counter up sebagai banyaknya putaran slide gambar.
4. Setelah datanya sesuai dengan slide gambar 1 maka motor berhenti sejenak lalu melanjutkan ke slide gambar 2 begitu seterusnya sampai slide gambar 4.
5. Setelah itu mikro memerintahkan motor down untuk memutar dari slide gamabar 4 menuju slide gambar 3 begitu seterusnya sampai kembali ke slide gambar 1. begitu terus prosesnya berulang.
3.2.2 Realisasi Rancangan Perangkat Lunak
Digunakan bahasa pemrograman assembly. Software yang digunakan adalah Reads51. Pada program ini dapat menulis, compiler dan testing serial jika dibutuhkan. Setelah source code dengan assembly dibuat, maka kemudian build, sehingga langsung dibuat file Hexa-nya. File Hexa inilah yang kemudian didownloadkan ke dalam mikrokontroller melalui downloader ISP (In System Programming). Proses build/ compiler, download file ke mikro terjadi dalam satu
proses. Bila ada error maka akan diberitahukan oleh Reads51 dan memberitahukan posisi baris salah sehingga memudahkan kita dalam pembuatan software.
BAB IV
PENGUJIAN ALAT
Untuk membuktikan bahwa alat ini bekerja dengan baik, maka alat ini perlu dilakukan pengujian yang mana untuk mengetahui keakuratan dalam pendisplayan tiap slide gambar. Dan motor DC bekerja merunning screen sesuai diharapkan yaitu slide per-slide gambar.
4.1 Pengujian Pencacahan Sensor Posisi
Sistem pengujian pencacahan merupakan hasil dari perputaran plat/ piringan sensor posisi yang terdiri dari delapan lubang untuk optocouplernya. Hasil pencacahan dalam bentuk pulsa tersebut berguna untuk mikrokontroller inputan Port 3.4 AT89S51.
Perputaran hasil pencacahan dalam bentuk pulsa Sebagai berikut : • Aktif Rolling Atas :
Jumlah Putaran Slide Gambar 1 =
∑
∑
ang cacahan lub = 8 1 ( kondisi awal )Jumlah Putaran Slide Gambar 2 = 8 55
= 6,875 ( 6 putaran + 7 lubang )
Jumlah Putaran Slide Gamabar 3 = 8 120
= 15
Jumlah Putaran Slide Gamabar 4 = 8 201
= 25,125 ( 25 putaran + 1 lubang )
• Aktif Rolling Bawah :
Jumlah Putaran Slide Gambar 4 =
∑
∑
ang cacahan lub = 8 1 ( kondisi awal )Jumlah Putaran Slide Gambar 3 = 8 14
Jumlah Putaran Slide Gambar 2 = 8 26
= 3,25 ( 3 putaran + 2 lubang )
Jumlah Putaran Slide Gambar 1 = 8 38
= 4,75 ( 4 putaran + 4 lubang )
4.2 Data Hasil Pengujian Pengukuran Selisih Slide Gambar Pada Alat
Pada pengujian alat ini ternyata dalam pendisplayan mengalami ketidak tepatan posisi slide, dengan kata lain slide tidak begitu center/ pas di tengah. Maka pengujian dilakukan pengukuran selisih tiap slidenya, karena tiap slide memiliki selisih berbeda-beda tiap Centimeternya. Pengujian dilakukan tiap slidenya sebanyak 10 kali pengulangan.
Tabel 4.1 Pengukuran Selisih Slide Gambar Pertama
Ke-1 Ke-2 Ke-3 Ke-4 Ke-5 Ke-6 Ke-7 Ke-8 Ke-9 Ke-10 0,6 0,6 0,8 0,8 0,8 1 1,5 2 2 2
Rata-rata Selisih Errornya = 10
1 , 12
= 1,21
Tabel 4.2 Pengukuran Selisih Slide Gambar Kedua
Ke-1 Ke-2 Ke-3 Ke-4 Ke-5 Ke-6 Ke-7 Ke-8 Ke-9 Ke-10 0,4 0,4 0,4 0,6 0,6 0,6 0,6 0,8 0,8 0,8
Rata-rata Selisih Errornya =
10 6
Tabel 4.3 Pengukuran Selisih Slide Gambar Ketiga
Ke-1 Ke-2 Ke-3 Ke-4 Ke-5 Ke-6 Ke-7 Ke-8 Ke-9 Ke-10
0,6 0,6 0,6 0,6 0,6 0,6 0,6 0,8 0,8 0,8
Rata-rata Selisih Errornya = 10
6 , 6
= 0,66
Tabel 4.4 Pengukuran Selisih Slide Gambar Keempat
Ke-1 Ke-2 Ke-3 Ke-4 Ke-5 Ke-6 Ke-7 Ke-8 Ke-9 Ke-10
0,8 0,8 0,8 0,8 0,8 1 1,4 1,4 1,6 1,6
Rata-rata Selisih Errornya = 10 11
= 1,1
BAB V
KESIMPULAN
Alat sudah bekerja sesuai dengan semestinya yaitu motor satu rolling ke atas, motor dua kondisi loss lalu screen running mendisplay slide gambar satu - delay 30 detik - screen bergerak ke atas mendisplay slide gambar dua - delay 30 detik - screen bergerak ke atas mendisplay slide gambar tiga - delay 30 detik - screen bergerak ke atas mendisplay slide empat. Dan kemudian sebaliknya motor dua aktif rolling ke bawah, motor satu kondisi loss lalu screen running kembali mendisplay slide gambar tiga - delay 30 detik - screen bergerak ke bawah mendisplay slide gambar dua - delay 30 detik - screen bergerak ke atas mendisplay slide gambar satu kembali, begitu seterusnya untuk looping sistem kerja screennya. Dari perputaran alat tersebut berjalan setiap slidenya berhenti untuk slide gambar selanjutnya, sudah sesuai dengan yang diinginkan walaupun posisi tidak terlalu tepat sekali pada garis, tapi sudah dapat hanya menampilkan satu slide gambar saja.
Pada alat tersebut ternyata mengalami timing yang berbeda di mana saat screen rolling ke atas dan ke bawah, ini dikarenakan kinerja motor pada saat turun bebannya lebih ringan dari pada saat naik. Oleh karena itu kelebihan dari alat ini adalah sensor posisi yang menentukan berapa banyaknya putaran untuk setiap slidenya. Kekurangannya karena sensor posisinya hanya delapan lubang untuk 360 derajat maka akurasinya hanya
8
360o . sehingga sensor hanya mengetahui
pergerakan setiap 45 derajat.
Untuk sarannya supaya keakuratanya lebih baik dibuat lubang yang lebih banyak pada sensor posisi sehingga bisa mendeteksi setiap 1 derajat. Dan sistem mekaniknya lebih presisi sesuai ketentuan yang dinginkan.
DAFTAR PUSTAKA
1. Widodo Budiharto, 2005, Perancangan Sistem dan Aplikasi Mikrokontroler, Jakarta: Elex Media Komputindo.
2. Haline, 2003, User’s Manual Programmer, Minimum System, Emulator & Evaluation Board Type : HB2000S, Haline Elektronik.
3. Setiawan, Sulhan, 2006, Mudah dan Menyenangkan Belajar Mikrokontroller, Yogyakarta, C.V Andi Offset.
Program Assembler lengkapnya sebagai berikut :
#include <sfr52.inc>EnableMotorUp bit P0.0 ;High Motor1 aktif Low Motor1 off
Motor1P bit P0.1 ;High Output Motor1P=12V Low kebalikan Kondisi Larangan M1P & M1M adalah + ; akan membuat IC Rusak
Motor1M bit P0.2 ;Low Output Motor1M=0V High Kebalikan
EnableMotorDown bit P0.3 ;High Motor2 aktif Low Motor2 Off
Motor2P bit P0.4 ;High Output Motor2P=12V Low Kebalikan
Motor2M bit P0.5 ;Low Output Motor2M=0 High kebalikan
TombolDown bit P3.2 TombolStart bit P3.3
Input1 bit P3.4 ;1 opto kena sinar/ pas di lubang
Input2 bit P3.5 ;0 Bila terhalang
LedUp bit P3.6 LedDown bit P3.7
Arah bit 00H ;0 maka turun 1 maka naik
JumlahNaik equ 30H JumlahTurun equ 31H
Slide1 equ 32H ;jumlah putaran setiap slide
Slide2 equ 33H Slide3 equ 34H Slide4 equ 35H
Pengali equ 36H ;utk mengalikan timer 0
InitTimer: Mov Tmod,#00100001B InitSerial: Mov Scon,#01010000B Mov Th1,#-3 Setb TR1 Init:Mov P0,#0ffH Clr EnableMotorUp Clr EnableMotorDown Mov P3,#0ffH Clr Arah
Mov JumlahTurun,#0 Mov Dptr,#MenuAwal Acall KirimKarakter Acall Enter Awal:Jnb TombolDown,GoBawah Jnb TombolStart,Main Acall StopDown Sjmp Awal GoBawah: Acall ShortDelay Acall RollingBawah Sjmp Awal Main:Acall ShortDelay IklanNaik: Acall RollingAtas HitungNaik:
Jb Input1,CounterUp ;kalau sudah dipasang ke alat maka ganti dg JB
Sjmp HitungNaik CounterUp: Clr LedUp Acall ShortDelay Jb Input1,$ Setb LedUp Mov A,JumlahNaik Add A,#1
Mov JumlahNaik,A ;memori utk menghitung jumlah putaran
Acall KonversiHex2Des Acall Enter
Mov A,JumlahNaik Cjne A,#55,CekSlide2
Mov Slide1,JumlahNaik ;simpan putaran ke slide 1 Mov Dptr,#SimpanSlide1 Acall KirimKarakter StopSlide1: Acall StopUp Acall DelayIklan ; Acall DelayIklan ; Acall DelayIklan ;================================================= ;Dari sini lanjutkan rolling up menuju slide dua
;---Sjmp IklanNaik CekSlide2: Cjne A,#120,CekSlide3 Mov Slide2,JumlahNaik Mov Dptr,#SimpanSlide2 Acall KirimKarakter StopSlide2: Acall StopUp Acall DelayIklan ; Acall DelayIklan ; Acall DelayIklan Sjmp IklanNaik CekSlide3: Cjne A,#201,HitungNaik Mov Slide3,JumlahNaik Mov Dptr,#SimpanSlide3 Acall KirimKarakter StopSlide3: Acall StopUp Acall DelayIklan ; Acall DelayIklan ; Acall DelayIklan Mov JumlahNaik,#0 Mov JumlahTurun,#0 ;=========================================== ;Selesai Rolling Naik ganti ke Rolling Bawah
;---IklanTurun:
Acall RollingBawah
HitungTurun:
Jb Input1,CounterDown ;kalau sudah dipasang ke alat maka ganti dg JB
Sjmp HitungTurun CounterDown: Clr LedUp Acall ShortDelay Jb Input1,$ Setb LedUp Mov A,JumlahTurun Add A,#1
Mov JumlahTurun,A ;memori utk menghitung jumlah putaran
Acall KonversiHex2Des Acall Enter
Mov A,JumlahTurun
Cjne A,#14,CekSlide2Turun
;CekSlide2Turun
Mov Slide3,JumlahTurun ;simpan putaran ke slide 1
Mov Dptr,#SimpanSlide3Turun Acall KirimKarakter
Mov JumlahNaik,#0
;=============================================== ;Selesai Rolling Naik ganti ke Rolling Atas lagi ;---Acall StopDown Acall DelayIklan ; Acall DelayIklan ; Acall DelayIklan CekSlide2Turun: Cjne A,#26,CekSlide1Turun Mov Slide2,JumlahTurun Mov Dptr,#SimpanSlide2 Acall KirimKarakter StopSlide2Turun: Acall StopDown Acall DelayIklan ; Acall DelayIklan ; Acall DelayIklan` CekSlide1Turun: Cjne A,#38,IklanTurun Mov Slide1,JumlahTurun Mov Dptr,#SimpanSlide1 Acall KirimKarakter StopSlide1Turun: Acall StopDown Acall DelayIklan Acall DelayIklan ; Acall DelayIklan ; Acall DelayIklan Ajmp Main ;===================================================== RollingAtas: Setb Motor1P Clr Motor1M
Acall ShortDelay Setb EnableMotorUp Acall LongDelay
Setb Arah ;tanda lagi naik
Ret StopUp: Acall ShortDelay Setb Motor1P Setb Motor1M Clr EnableMotorUp Acall LongDelay Ret StopDown: Acall ShortDelay Setb Motor2P Setb Motor2M Clr EnableMotorDown Acall LongDelay Ret RollingBawah: Setb Motor2P Clr Motor2M Acall ShortDelay Setb EnableMotorDown Acall LongDelay
Clr Arah ;tanda lagi turun
Ret ;====================================================== KonversiHex2Des: Mov R2,#0 Mov R3,#0 Mov R4,#0 Ratusan: Clr C RAtus: Subb A,#100 JC Puluhan Inc R2 Sjmp Ratus Puluhan: Clr C Add A,#100 Puluh: Subb A,#10 Jc Satuan
Inc R3 Sjmp Puluh satuan:
Clr C Add A,#10
Mov R4,A ;nilai satuan simpan di r4 ;--- KirimString: Mov A,R2 Add A,#30H Acall Send Mov A,R3 Add A,#30H Acall Send Mov A,R4 Add A,#30H Acall Send Ret KirimKarakter: Clr A Movc A,@A+DPTR JZ Exit Acall Send Inc Dptr Sjmp KirimKarakter Exit:Ret Enter: Mov A,#13 Acall Send Mov A,#10 Acall Send Ret Send: Mov Sbuf,A Jnb Ti,$ Clr Ti Ret ShortDelay: Djnz R7,ShortDelay Ret LongDelay: Mov R5,#3 Loop: Djnz R7,Loop
Djnz R6,Loop Djnz R5,Loop Ret DelayIklan: Mov R5,#20 Loop2: Djnz R7,Loop2 Djnz R6,Loop2 Djnz R5,Loop2 Ret Delay10S: Mov Pengali,#200 Wait10S: Acall Delay50mS Djnz Pengali,Wait10S Ret Delay5S: Mov Pengali,#100 Wait5S: Acall Delay50mS Djnz Pengali,Wait5S Ret Delay1S: Mov Pengali,#20 Wait1S: Acall Delay50mS Djnz Pengali,Wait1S Ret Delay500mS: Mov Pengali,#10 Wait500mS: Acall Delay50mS Djnz Pengali,Wait500mS Ret Delay50ms: Mov Th0,#3CH Mov TL0,#0AFH Setb TR0 Wait: Jnb TF0,Wait Clr TR0
Clr TF0 Ret
MenuAwaL: DB "Program Rolling Iklan Reklame",0 SimpanSlide1: DB "Simpan Slide 1",13,10,0
SimpanSlide2: DB "Simpan Slide 2",13,10,0 SimpanSlide3: DB "Simpan Slide 3",13,10,0 SimpanSlide4: DB "Simpan Slide 4",13,10,0
SimpanSlide3Turun: DB "Simpan Slide 3 Turun",13,10,0