1
BAB I PENDAHULUAN
I.1. Latar Belakang
Pulau Sumatra merupakan pulau yang terletak pada zona subduksi lempeng Eurasia dengan Indo-Australia di wilayah barat Indonesia. Zona subduksi ini merupakan zona yang paling sering melepaskan energi di Indonesia (McCaffrey, 2009). Lempeng Indo-Australia menunjam pada lempeng Eurasia membentuk sudut miring-kanan (right-lateral) dengan kecepatan 5 s.d. 7 cm/tahun (Prawirodirjo, dkk., 2000). Akibat dari penunjaman miring ini adalah terbentuknya patahan geser ( strike-slip) di sepanjang Pulau Sumatra (Hidayat, dkk., 2012) yang disebut dengan Patahan Sumatra atau Patahan Semangko atau Patahan Ulu-Aer (Sieh dan Natawidjaja, 2000).
Patahan Sumatra merupakan patahan jenis strike-slip (patahan geser) yang memanjang 1900 km dari ujung utara Sumatra sampai ujung selatan yang sebagian bertepatan dengan gugus gunung api Sumatra (Sieh dan Natawidjaja, 2000). Aktifitas pada Patahan Sumatra sangat tinggi, sehingga sering menyebabkan banyak terjadinya gempa bumi besar yang menyebabkan kerugian material besar selama 200 tahun terakhir ini (Natawidjaja dan Triyoso, 2008). Menurut catatan gempa Badan Meteorologi, Klimatologi, dan Geofisika (BMKG) pada kurun waktu 2010 s.d. 2013, beberapa gempa bumi terjadi dalam magnitude > 6,0 Skala Richter (SR) dan lebih dari 100 gempa bumi terjadi pada magnitude 5 s.d. 6 SR. Gempa bumi dengan magnitude lebih dari 6,0 SR tersebut antara lain Gempa Mentawai 7,2 SR (2010), Gempa Sinabang-Aceh 7,6 SR (2010), Gempa Singkilbaru-Aceh 6,7 SR (2011), dan Gempa di Lepas pantai barat Sumatra 8,6 SR (500 km dari Aceh) (2012) (BMKG, 2013).
Banyaknya gempa bumi yang terjadi di Pulau Sumatra menunjukkan perlunya upaya mitigasi bencana gempa bumi pada wilayah ini. Salah satu bentuk upaya mitigasi ini adalah dengan memodelkan zonasi wilayah dengan berdasarkan potensi kegempaannya. Model potensi gempa bumi ini diturunkan dari model tegangan (stress), sedangkan model tegangan ini bisa diperoleh salah satunya dari nilai dan pola regangan 2D pada wilayah yang sama (Abidin, 2007). Dalam hal ini, secara
2 tidak langsung, analisis dan pemodelan regangan 2D di wilayah Pulau Sumatra penting untuk upaya mitigasi bencana. Analisis dan pemodelan regangan 2D semakin penting mengingat pada Pulau Sumatra terdapat zona Patahan Sumatra dan zona subduksi lempeng Indo-Australia dan Eurasia merupakan zona yang paling sering melepaskan energi gempa bumi tiap tahunnya (Setyonegoro, dkk., 2012). Dalam hal ini, analisis dan pemodelan regangan 2D perlu diperbarui secara berkala untuk bisa mewadahi perubahan nilai dan pola regangan pada wilayah ini.
Analisis dan pemodelan pola regangan 2D bisa diturunkan salah satunya dari data pergeseran titik pantau yang dihasilkan oleh perubahan posisi titik multi-temporal akibat adanya kejadian gempa bumi. Pergeseran titik pantau selama bertahun-tahun terdokumentasikan melalui perekaman kontinyu stasiun permanen GNSS-CORS di Pulau Sumatra. Dalam hal ini, sejak tahun 1996 telah dibangun instalasi stasiun GNSS-CORS permanen yang kontinyu oleh Badan Informasi Geospasial (BIG). Stasiun GNSS-CORS ini berjumlah 124 stasiun yang tersebar di seluruh Indonesia (21 stasiun diantaranya ada di Pulau Sumatra) dan disebut sebagai sistem Ina-CORS (Aditiya, dkk., 2014). Salah satu fungsi Ina-CORS adalah untuk mendukung aplikasi ilmiah seperti pemantauan deformasi dan geodinamika (Abidin, dkk., 2010). Oleh karena itu, data pengamatan Ina-CORS ini potensial untuk analisis dan pemodelan regangan tektonik 2D di Pulau Sumatra.
Analisis dan pemodelan regangan 2D umumnya dilakukan dengan membentuk jaring-jaring segitiga antar stasiun pengamatan. Jika jarak antar stasiun pengamatan jauh, maka pemodelan regangan kurang realistis untuk mewadahi wilayah yang luas. Metode hitungan yang sering digunakan untuk memperoleh nilai regangan 2D adalah hitung perataan konvensional (Rusmen, dkk., 2012). Dalam hal ini, metode Modified Least Square (MLS) yang dikenalkan oleh Shen, dkk. (1996) mampu menghasilkan nilai regangan yang lebih rapat melalui pembentukan grid-grid tertentu. Metode MLS ini mengestimasi nilai regangan berdasarkan kontribusi stasiun-stasiun yang ada di dekatnya, stasiun yang dekat memiliki kontribusi lebih besar dari stasiun yang jauh (Teza, dkk., 2008). Metode MLS ini memiliki kelebihan yaitu model regangan bisa disajikan secara lebih realistis (seragam) dalam cakupan wilayah tertentu sesuai dengan faktor pembobotan yang diterapkan (Shen, dkk., 1996). Dalam hal ini, pemakaian metode MLS sangat potensial untuk analisis dan pemodelan regangan
3 tektonik 2D yang lebih realistis pada wilayah yang luas seperti Pulau Sumatra.
Analisis dan pemodelan pola regangan 2D telah dilakukan sebelumnya oleh Bock, dkk. (2003) dengan membentuk jaring-jaring segitiga pada seluruh wilayah Indonesia termasuk pada Patahan Sumatra dengan data pengamatan tahun 1991 s.d. 2001. Berdasarkan hasil penelitian tersebut dapat diketahui bahwa nilai regangan 2D berkisar antara 5x10-8 s.d. 10-7. Pola regangan pada bagian barat Pulau Sumatra di dominasi oleh regangan kompresi 2D, sedangkan pada bagian timur dan selatan didominasi oleh ekstensi 2D. Nilai dan pola regangan ini terbatas pada data tahun 2001, padahal gempa tektonik berkekuatan besar di Pulau Sumatra terus terjadi pada kurun waktu setelah tahun 2001 tersebut. Gempa yang terjadi pada kurun waktu setelah tahun 2001 sampai sekarang mungkin saja mengubah nilai dan pola regangan 2D pada waktu sekarang ini. Selain itu, penggunaan metode MLS potensial untuk pemodelan regangan 2D yang lebih realistis. Di sisi lain, dalam upaya mitigasi bencana pada waktu sekarang ini dibutuhkan pemodelan nilai dan pola regangan 2D yang terbaru. Oleh karena itu, penelitian untuk menganalisis nilai dan pola regangan 2D tahun pada kurun waktu terbaru (tahun 2010 s.d. 2013) di Patahan Sumatra perlu dilakukan kembali. Pada penelitian ini dilakukan analisis dan pemodelan regangan 2D dengan metode MLS menggunakan data tahun 2010 s.d. 2013 di Patahan Sumatra.
I.2. Rumusan Masalah
Berdasarkan latar belakang yang telah dijelaskan, diketahui bahwa zona Patahan Sumatra memiliki potensi bencana yang besar. Aktivitas tektonik pada Patahan Sumatra berupa gempa bumi menyebabkan perubahan posisi titik-titik pantau seperti stasiun GNSS-CORS. Selanjutnya data perubahan posisi tersebut bisa dimanfaatkan untuk analisis nilai dan pola regangan. Analisis nilai dan pola regangan 2D ini merupakan salah satu hal penting dalam upaya mitigasi bencana gempa bumi. Teridentifikasinya nilai dan pola regangan 2D dapat menjadi informasi penting dalam upaya mitigasi bencana gempa bumi di suatu wilayah yang sering terjadi gempa bumi seperti Pulau Sumatra. Nilai dan pola regangan 2D di Pulau Sumatra secara umum telah diketahui melalui penelitian Bock, dkk. (2003) memakai data tahun 1991 s.d. 2001, di sisi lain gempa bumi masih sering terjadi pada kurun waktu 2010 s.d. 2013. Oleh
4 karena itu, nilai dan pola regangan 2D tahun 2010 s.d. 2013 di Patahan Sumatra mungkin saja berubah. Belum diketahuinya besar dan pola regangan tahun 2010 s.d. 2013 di Patahan Sumatra merupakan masalah yang diangkat pada penelitian ini.
I.3. Pertanyaan Penelitian Pertanyaan dalam penelitian ini adalah :
1. Berapakah nilai regangan 2D lempeng tektonik di Patahan Sumatra pada kurun waktu 2010 s.d. 2013 ?
2. Bagaimanakah pola regangan 2D lempeng tektonik di Patahan Sumatra pada kurun waktu 2010 s.d. 2013 ?
I.4. Tujuan Penelitian Tujuan penelitian ini adalah sebagai berikut:
1. Pengidentifikasian nilai regangan 2D lempeng tektonik di Patahan Sumatra pada kurun waktu 2010 s.d. 2013.
2. Pengidentifikasian pola regangan 2D lempeng tektonik di Patahan Sumatra dari tahun 2010 s.d. 2013.
I.5. Manfaat Penelitian
Hasil penelitian ini berupa informasi nilai dan pola regangan 2D lempeng tektonik di Patahan Sumatra tahun 2010 s.d. 2013. Informasi yang dihasilkan dari penelitian ini dapat digunakan untuk :
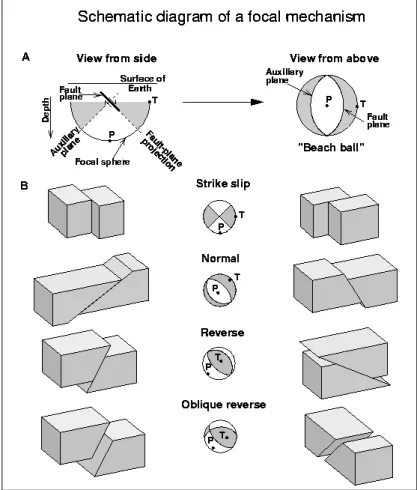
1. Mengidentifikasi struktur penyebab gempa jika dianalisis bersama peta geologi dan focal mechanisms, sehingga hal ini mempermudah proses inversi kegempaan secara geofisis.
2. Memprediksi akumulasi energi tektonik yang terkumpul pada gempa tektonik yang akan terjadi selanjutnya, sehingga hal ini dapat menjadi acuan bagi perencanaan mitigasi bencana gempa bumi di wilayah Pulau Sumatra.
5 3. Menentukan wilayah-wilayah yang memiliki resiko gempa yang tinggi, sehingga hal ini dapat menjadi masukan bagi pelaksanaan mitigasi bencana di wilayah Pulau Sumatra.
I.6. Batasan Penelitian Batasan penelitian ini meliputi beberapa hal, yaitu :
1. Stasiun GNSS-CORS yang dipakai adalah 14 stasiun pada sistem Ina-CORS dengan konfigurasi menyilang sepanjang segmen Patahan Sumatra.
2. Data GNSS yang diolah dibatasi jumlahnya untuk efisiensi pengolahan, yakni maksimal 30 data per tahun.
3. Penggunaan modul earthquake-file dalam GLOBK untuk mewadahi pengolahan data yang terpengaruh gempa tidak dilakukan pada penelitian ini, karena data yang dipilih dianggap telah menghindari doy gempa.
I.7. Tinjauan Pustaka
Pulau Sumatra merupakan pulau yang berada pada pertemuan lempeng tektonik Eurasia dan Indo-Australia. Sangat aktifnya pergerakan lempeng pada pulau ini menyebabkan geodinamikanya sangat tinggi. Beberapa penelitian untuk memantau geodinamika di zona subduksi maupun di zona patahan pada pulau ini telah banyak dilakukan. Beberapa metode yang dipakai antara lain dengan metode seisimik, pengamatan GPS dan pengamatan melalui penginderaan jauh.
Penerapan data seisimik untuk mengetahui karakteristik distribusi seismik di sepanjang Busur Sunda (barat Sumatra) dilakukan pertama kali oleh Ghose dan Oike (1988). Penelitian ini memanfaatkan data seisimik dari NOAA Hipocenter Data File
(1900 s.d. 1981) dan ISC Data File (1971 s.d. 1983) dengan validasi menggunakan data anomali gayaberat Free-air dari satelit GEOS-3 dan SEASAT-1. Pada tahun 2006, pemantauan pergerakan lempeng di Busur Sunda kembali dilakukan oleh Lasitha, dkk. (2006) memanfaatkan data seismik dari NOAA Epicentral Listing pada tahun 1900 s.d. 2000 dan data Focal Mechanisms dari Harvard Centroid Moment Tensors (CMT). Lokasi yang diamati oleh kedua penelitian ini hampir sama yakni
6 pada Patahan Sumatra, Patahan Segmen Mentawai, Sunda Strait, Java Fault Zone,
dan Java Fore-Arc region. Keduanya mengindikasikan adanya variasi geodinamika lempeng terhadap waktu (temporal). Khusus pada Patahan Sumatra, Lasitha, dkk. (2006) menyimpulkan bahwa pergerakan geser miring-kanan (right-lateral) adalah sebesar 1 s.d. 29 mm/tahun.
Data pengamatan citra satelit penginderaan jauh telah dipakai dalam pemantauan pergerakan lempeng di Pulau Sumatra. Data citra SPOT dikombinasikan dengan peta topografi telah dipakai pada pemantauan pergerakan Patahan Sumatra oleh Bellier dan Sebrier (1994). Sedangkan data foto udara stereo dikombinasikan dengan peta topografi telah dipakai untuk membuat peta modern neotektonik setiap segmen sepanjang Patahan Sumatra oleh Sieh dan Natawidjaja (2000). Hasil yang didapatkan Bellier dan Sebrier (1994) saling berbeda dengan Sieh dan Natawidjaja (2000) dalam hal keterkaitan antara Patahan Sumatra dengan gunung api. Bellier dan Sebrier (1994) mengklaim adanya hubungan antara Patahan Sumatra dan gunung api, sedangkan dengan Sieh dan Natawidjaja (2000) tidak mengklaim adanya keterkaitan antar keduanya.
Pengamatan GPS pertama kali pada zona Java-Trench yang termasuk juga di dalamnya bagian selatan Pulau Sumatra telah dilakukan oleh Tregoning, dkk. (1994). Pemantauan dengan GPS pada zona subduksi Sunda Megathrust, Investigator Fracture Zone, dan Patahan Sumatra di utara dan selatan lintang 0,5o S telah dilakukan oleh Prawirodirjo, dkk. (1997). Penelitian dengan menggunakan data GPS untuk pemantauan zona-zona subduksi atau patahan lain di Pulau Sumatra juga telah dilakukan. Penelitian ini antara lain : pemantauan zona patahan di bagian utara Pulau Sumatra (2o S s.d. 3o N) (McCaffrey, dkk., 2000), pemantauan subduksi di patahan Andaman dan Patahan Sumatra (Subarya, dkk., 2008), pemantauan patahan Segmen Mentawai setelah gempa 2010 (Rusmen, dkk., 2012), pemantauan subduksi lempeng di seluruh wilayah Indonesia termasuk dikhususkan beberapa pengamatan lebih di Patahan Sumatra dan Sunda Megathrust (Bock, dkk., 2003), dan juga pemantauan deformasi pada cekungan Warthon (Pratama, dkk., 2013). Dalam hal ini, pengamatan dengan GPS khusus untuk keperluan pemantauan Patahan Sumatra belum secara spesifik dilakukan.
7 bersumber dari data pengamatan stasiun GEODYSSEA-GPS (Michel, dkk., 2001) yang terdiri atas 49 stasiun (32 stasiun berada di Indonesia), pengamatan stasiun permanen seperti SuGAR (Sumatran GPS Array), IGS, dan SOPAC (Tregoning, dkk., 1994; Michel, dkk., 2001; Rusmen, dkk., 2012), pengamatan Campaign Station di wilayah terdeformasi (Subarya, dkk., 2008), dan kombinasi antara beberapa sumber tersebut (Bock, dkk., 2003). Data yang dipakai pada penelitian sebelumnya memiliki kurun waktu 3 s.d. 5 tahun dengan jarak waktu antar pengamatan bisa 1 s.d. 3 tahun. Dalam hal ini, sumber data lain seperti stasiun permanen GNSS-CORS di Indonesia (Ina-CORS) belum pernah dipakai untuk analisis geodinamika di Pulau Sumatra khususnya pada zona Patahan Sumatra.
Pengolahan data GPS pada pemantauan geodinamika Pulau Sumatra selama ini menggunakan perangkat lunak ilmiah seperti GAMIT/GLOBK, BERNESE, GIPSY-OASIS II (Subarya, dkk., 2008; Bock, dkk., 2003; Tregoning, dkk., 1994; Michel, dkk., 2000; Rusmen, dkk., 2012, Pratama, dkk., 2013). Dengan data pengamatan GPS pada lokasi Pulau Sumatra, penelitian-penelitian yang ada memperoleh beberapa hasil berbeda, yaitu : (i) nilai kecepatan pergeseran stasiun yang dianggap mewakili pergerakan relatif lempeng tektonik (Prawirodirjo, dkk., 1997; Michel, dkk., 2000; Bock, dkk., 2003; Pratama, dkk., 2013), (ii) nilai dan pola regangan tektonik dan nilai rotasi tektonik pada masing-masing blok segitiga yang terbentuk (McCaffrey, dkk., 2000; Michel, dkk., 2000; Bock, dkk., 2003; Rusmen, dkk., 2012), (iii) mengestimasi nilai tegangan geser (McCaffrey, dkk., 2000), dan (iv) memodelkan laju penunjaman (slip rates) tektonik per tahun pada zona subduksi miring (oblique subduction) dengan tambahan data seismik (McCaffrey, dkk., 2000; Subarya, dkk., 2008). Pada estimasi nilai/parameter regangan, metode yang telah digunakan pada penelitian sebelumnya antara lain hitung perataan kuadrat terkecil (Least Square Adjustment) (Rusmen, dkk., 2012) maupun dengan hitung perataan parameter berbobot (Weighted Least Square Adjustment) (McCaffrey, dkk., 2000). Adapun estimasi nilai regangan dengan metode hitungan Modified Least Square
(MLS)yang menekankan pada faktor skala saat mengestimasi regangan (Teza, dkk., 2008) masih belum pernah diterapkan spesifik pada Patahan Sumatra.
Pada penelitian ini, dilakukan analisis dan pemodelan regangan 2D tektonik secara spesifik pada zona Patahan Sumatra menggunakan data pengamatan stasiun
8 permanen GNSS-CORS Indonesia (Ina-CORS). Penelitian ini menggunakan perangkat lunak ilmiah GAMIT/GLOBK 10.5 untuk estimasi nilai koordinat stasiun setiap tahunnya pada kurun waktu 2010 s.d. 2013. Estimasi nilai dan pemodelan regangan tektonik 2D dilakukan memanfaatkan metode hitungan MLS.
I.8. Landasan Teori I.8.1. Geodinamika
Geodinamika adalah sebuah studi yang berkaitan dengan proses-proses dasar fisika dan matematika yang meliputi pengukuran, pemodelan, penafsiran konfigurasi dan gerak dari mantel, kerak, dan inti bumi serta berbagai fenomena geologi (Turcotte dan Schubert, 2002). Geodinamika tidak bisa dilepaskan dari teori tektonik lempeng, yakni teori dalam bidang geologi yang dikembangkan untuk memberi penjelasan terhadap adanya bukti-bukti pergerakan skala besar yang dilakukan oleh litosfer bumi (Sullivan, 1991). Lapisan litosfer bumi terbagi menjadi beberapa lempeng besar yang menyusun permukaan bumi. Lempeng besar tersebut antara lain Lempeng Afrika, Lempeng Antartika, Lempeng Indo-Australia, Lempeng Eurasia dan Lempeng Amerika Utara (Kious dan Tilling, 1996).
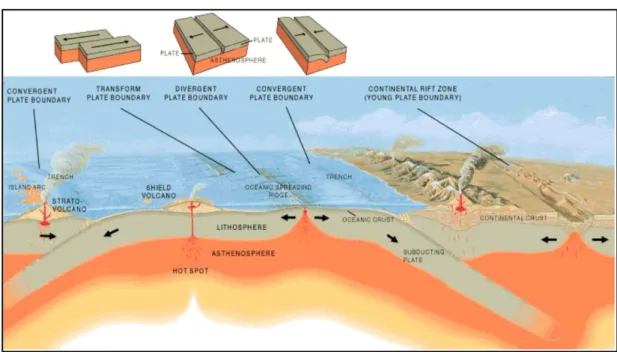
Setiap lempeng memiliki batas antar lempeng seperti yang disajikan pada Gambar I.1 berikut.
9 Batas antar lempeng teridiri atas tiga jenis, yaitu (Kious dan Tilling, 1996): 1. Batas transform (transform boundaries) terjadi jika lempeng bergerak dan
mengalami gesekan satu sama lain secara menyamping di sepanjang sesar transform (transform fault). Gerakan relatif kedua lempeng bisa sinistral/ left-lateral (ke kiri di sisi yang berlawanan dengan pengamat) ataupun dekstral/right-lateral (ke kanan di sisi yang berlawanan dengan pengamat). Contoh sesar jenis ini adalah Sesar San Andreas di California.
2. Batas divergen/konstruktif (divergent/constructive boundaries) terjadi ketika dua lempeng bergerak menjauh satu sama lain. Mid-oceanic ridge dan zona retakan (rifting) yang aktif adalah contoh batas divergen.
3. Batas konvergen/destruktif (convergent/destructive boundaries) terjadi jika dua lempeng bergesekan mendekati satu sama lain sehingga membentuk zona subduksi jika salah satu lempeng bergerak di bawah yang lain, atau pertemuan benua (continental collision) jika kedua lempeng mengandung kerak benua. Palung laut yang dalam biasanya berada di zona subduksi, dimana potongan lempeng yang terhunjam mengandung banyak bersifat hidrat (mengandung air), sehingga kandungan air ini dilepaskan saat pemanasan terjadi bercampur dengan mantel dan menyebabkan pencairan sehingga menyebabkan aktivitas vulkanik. Contoh kasus ini di Pegunungan Andes di Amerika Selatan dan busur Pulau Jepang.
I.8.2. Zona Subduksi Pulau Sumatra
Pulau Sumatra merupakan salah satu pulau yang menempati tektonik lempeng bagian barat Indonesia. Pulau Sumatra bersama Pulau Jawa, Bali, Kalimantan dan barat-daya Sulawesi menempati Zona Paparan Sunda (Sunda Shelf) (Hamilton, 1979). Pulau Sumatra memiliki beberapa zona subduksi yang terbentuk akibat penunjaman miring Lempeng Eurasia dengan Indo-Australia di sepanjang lepas pantai barat Pulau Sumatra (Prawirodirjo, dkk., 2000). Akibat penunjaman miring ini pada Pulau Sumatra terdapat banyak zona subduksi, antara lain Patahan Sumatra, Patahan Batee, Patahan Segmen Mentawai, Patahan Andaman dan SundaMegathrust
10 Gambar I.2. Zona subduksi pada Pulau Sumatra (McCaffrey, 2009).
Gambar I.2. menunjukkan bahwa Pulau Sumatra memiliki beberapa zona subduksi yang tersebar di sepanjang wilayah daratan dan lepas pantainya. Pada lepas pantai Pulau Sumatra terdapat tiga zona subduksi yakni Mentawai Fault, Batee Fault, dan West-Andaman Fault. Mentawai Fault terletak memanjang sepanjang Kepulauan Mentawai (Siberut, Pagai, dan Sipora). Batee Fault terletak di lepas pantai Pulau Nias dan Simeulue, sedangkan West-Andaman Fault terletak sepanjang lepas pantai barat Aceh sampai kepulauan Nicobar.
Adapun di daratan Pulau Sumatra terdapat zona Patahan Sumatra sepanjang 1900 km membentuk komponen patahan lateral kanan (right-lateral fault) dari tumbukan lempeng Eurasia dan Indo-Australia (Sieh dan Natawidjaja, 2000). Patahan Sumatra ini membentuk barisan gunung api yang aktif di sepanjang Pulau Sumatra bernama Bukit Barisan (McCaffrey, 2009). Patahan Sumatra terdiri atas 19 segmen utama yang terbagi dalam tiga domain, yakni domain selatan, domain tengah, dan domain utara (Sieh dan Natawidjaja, 2000).
Pada domain selatan, terdiri atas segmen Semangko, Kumering, Manna, Musi, Ketaun dan Dikit. Pada domain tengah terdiri atas segmen Siulak, Suliti, Sumani,
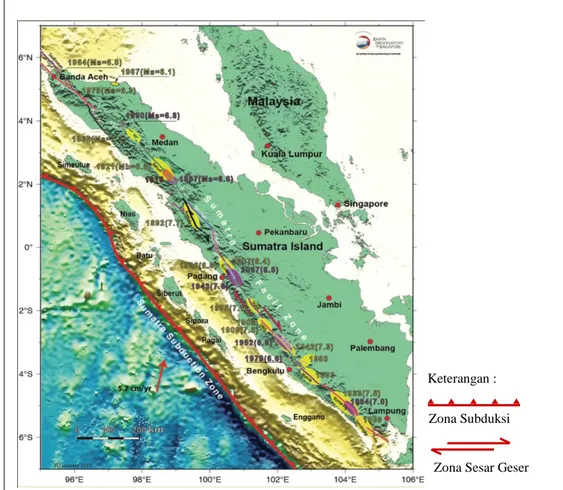
11 Sianok, Sumpur, Barumun, Angkola dan Toru. Adapun pada domain utara terdiri atas segmen Renun, Tripa, Batee, Aceh dan Seulimeum. Masing-masing segmen pembentuk Patahan Sumatra ini telah terbentuk sejak beberapa abad silam akibat gempa tektonik dengan magnitude lebih dari 7,0 SR (Sieh dan Natawidjaja, 2000). Gambar I.3. menyajikan beberapa kejadian gempa tektonik yang terjadi sepanjang Patahan Sumatra sejak 1892 s.d. 2007.
Gempa yang terjadi pada wilayah ini pun masih berlanjut sampai saat sekarang ini. Menurut data kegempaan BMKG pada kurun waktu 2010 s.d. 2013 masih terjadi beberapa gempa tektonik sepanjang sesar ini terutama pada wilayah Banda Aceh, Bengkulu, dan Bandar Lampung. Pada kurun waktu tersebut, beberapa gempa tektonik bisa terjadi pada magnitud lebih dari 6,0 SR walaupun kadang episentrumnya terletak di lautan, meskipun juga ada yang di darat (BMKG, 2013). Dengan demikian bisa dikatakan bahwa potensi gempa tektonik pada Patahan Sumatra ini cukup besar, sehingga perlu pemantauan kontinyu.
Gambar I.3. Kejadian gempa tektonik di sepanjang Patahan Sumatra (EOS, 2012)
Zona Subduksi
Zona Sesar Geser Keterangan :
12 I.8.3. Teknik Pemantauan Lempeng Tektonik
Pemantauan langsung terhadap lempeng tektonik merupakan hal yang sulit. Pendekatan pemantauan di permukaan bumi pada bed-rock telah banyak diterapkan untuk mewakili lempeng tektonik. Teknik pemantauan lempeng tektonik dengan teknik land-based surveying jarang dipakai karena keterbatasan dalam hal luas cakupan. Sejak periode 1990, pemantauan lempeng tektonik berkembang dengan adanya teknologi space-based geodesy, teknik-teknik tersebut antara lain VLBI, SLR, dan GPS/GNSS (www.leeds.ac.uk).
VLBI atau Very Long Baseline Interferometry adalah pendekatan pemantauan dengan mengukur sedikit perbedaan waktu kedatangan sinyal radio alami yang dipancarkan dari bintang quasar terdeteksi oleh berbagai radio-teleskop. Metode ini dapat melakukan pengukuran selama beberapa tahun sehingga memungkinkan diketahuinya perubahan posisi relatif radio-teleskop.
Pendekatan lain dalam pemantauan lempeng tektonik adalah dengan menggunakan satelit reflektif di orbit Bumi. Sistem Satellite Laser Ranging (SLR) memberikan pancaran singkat sinar laser yang dikirim ke satelit dari stasiun bumi dan dipantulkan kembali ke stasiun bumi. Pengukuran waktu perjalanan (dalam pico seconds) bisa menentukan jarak ke satelit dan pengukuran berulang untuk satu negara memungkinan untuk menentukan posisinya relatif terhadap konstelasi satelit reflektif. Dalam hal ini, kerangka acuan untuk mendeteksi gerakan lempeng aktif (waktu rata-rata selama beberapa tahun) adalah serangkaian orbit Bumi (www.leeds.ac.uk).
Pendekatan teknik pemantauan lempeng tektonik lainnya adalah dengan GPS/GNSS. GPS/GNSS memakai konstelasi satelit navigasi (minimal empat satelit) di luar angkasa untuk melakukan reseksi dengan persamaan jarak sehingga didapatkan posisi teliti di permukaan bumi. Pengukuran dengan GPS/GNSS pada satu titik relatif terhadap titik lainnya dalam kerangka waktu tertentu potensial dipakai untuk pemantauan lempeng tektonik. Teknik ini secara teknis lebih handal dibanding teknik VLBI dan SLR, teknik ini memiliki biaya lebih murah dan bisa diaplikasikan dimanapun area pengamatannya dengan mudah oleh operator yang bebas.
13 I.8.4. Global Navigation Satellite System (GNSS)
Pengertian GNSS mengacu pada pengertian GPS, yakni merupakan sistem sistem navigasi berbasis satelit yang dapat digunakan oleh banyak orang sekaligus dalam segala cuaca, didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti dan juga informasi waktu, secara kontinyu di seluruh dunia (Wells, dkk., 1986). Satelit GNSS yang saat ini aktif memberikan layanan penentuan posisi adalah GPS, GLONASS, dan GALILEO. GPS dikembangkan oleh Amerika Serikat sejak tahun 1973, dan mulai digunakan untuk menyelesaikan persoalan geodesi sejak sekitar 1983. Adapun GLONASS dikembangkan oleh Rusia sejak 1970 dan diresmikan pada Februari 1982. Beberapa GPS receiver (Topcon, Leica, dan
Trimble) dapat menangkap kedua sinyal satelit GPS dan GLONASS secara simultan. Teknologi GNSS ini telah berkembang dan banyak diterapkan pada penentuan posisi teliti titik-titik dalam jaringan dari waktu ke waktu. Hal ini bermanfaat pada pemantauan deformasi suatu objek. GNSS telah diaplikasikan untuk pengamatan dinamika bumi (geodinamika) seperti pergerakan sesar, lempeng tektonik, yang selanjutnya dipakai untuk prediksi gempa bumi dan letusan gunung berapi (Abidin, 1995). GNSS pun telah dikembangkan menjadi bentuk stasiun permanen dan secara kontinyu merekam data GNSS dan memberikan layanan data kepada pengguna, stasiun ini biasa disebut sebagai GNSS-CORS.
I.8.5. GNSS-CORS Indonesia (Ina-CORS)
CORS (Continuously Operating Reference Station) adalah suatu teknologi berbasis GNSS yang berwujud sebagai suatu jaring kerangka geodetik. Pada setiap titik CORS ini dilengkapi dengan receiver yang mampu menangkap sinyal dari satelit-satelit GNSS. Stasiun CORS beroperasi secara penuh dan kontinyu selama 24 jam perhari, 7 hari per minggu untuk mengumpukan, merekam, mengirim data pengamatan GNSS, dan memungkinkan para pengguna memanfaatkan data dalam penentuan posisi, baik secara post-processing maupun secara real time.
Di Indonesia stasiun permanen CORS dikelola oleh BIG dan diberi nama Ina-CORS. Jumlah Ina-CORS yang telah dioperasikan adalah sebanyak 124 stasiun terdiri atas 102 yang didanai dengan APBN, 19 stasiun didanai oleh kerjasama Indonesia dengan Jerman (program Ina-TEWS), dan tiga stasiun didanai dari Delft University of Technology
14 (TU Delft) di Palu, Watau dan Toboli (Sulawesi) (Aditiya, dkk., 2014). Lokasi stasiun CORS ini ditempatkan tersebar di seluruh Indonesia pada beberapa pulau utama yakni Jawa, Sumatra, Bali, Kalimantan, Sulawesi, NTT, NTB, Maluku dan Papua.
I.8.6. Penentuan Posisi Relatif dengan Pengamatan GNSS-CORS
Penentuan posisi relatif dengan GNSS-CORS ini pada dasarnya sama dengan penentuan posisi relatif dengan pengamatan receiver GNSS pada umumnya. Pada penentuan posisi dengan metode relatif, posisi suatu titik ditentukan relatif terhadap titik lainnya yang telah diketahui koordinatnya. Penentuan posisi relatif melibatkan setidaknya dua receiver GNSS, titik-titik stasiunnya statik (tidak bergerak) maupun bergerak (kinematik), dan pengolahan data umunya dilakukan secara post-processing
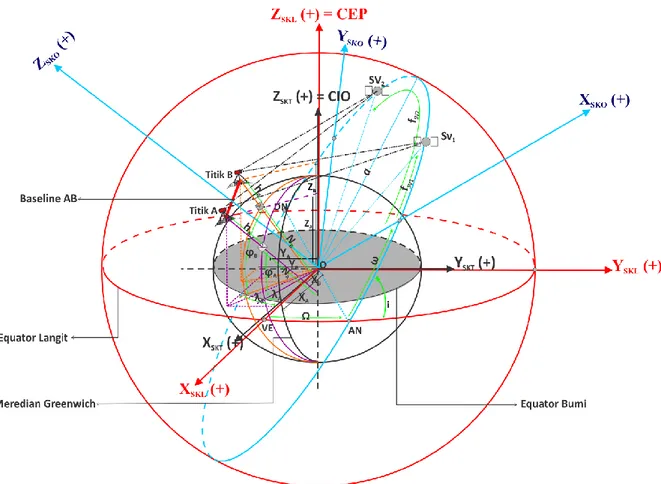
untuk memperoleh ketelitian yang lebih tinggi (Abidin, 2003). Ilustrasi penentuan posisi secara relatif statik dengan GNSS di atas model bumi elipsoid ditunjukkan pada Gambar I.4. berikut ini :
15 Dalam hal ini,
{X (+), Y(+), Z(+)}SKL : salib sumbu sistem koordinat langit 3D {X (+), Y(+), Z(+)}SKO : salib sumbu sistem koordinat orbit 3D {X (+), Y(+), Z(+)}SKT : salib sumbu sistem koordinat terestrial 3D (SV)i : satellite vehicle ke-i
Titik A dan B : posisi receiver di permukaan bumi
(φ, λ, h) : lintang, bujur, dan tinggi geodetik mengacu pada elipsoid WGS ‘84
(X, Y, Z)A,B : koordinat kartesian 3D titik A dan B N : jari-jari kelengkungan vertikal utama
O : origin yang berhimpit dengan pusat massa bumi Ω : asensio rekta dari ascending node
ω : argument of perigee
a : setengah sumbu panjang bidang orbit
i : inklinasi bidang orbit
AN : titik ascending node
DN : titik descending node
Dalam hal ini elipsoid yang dipakai adalah WGS ’84, pendefinisian parameternya sebagai berikut (Sunantyo, 2000) :
Setengah sumbu panjang (a) = 6378137 ± 2 m Penggepengan (f) = 1/298,257223563 Setengah sumbu pendek (b) = 6356752,3142 m
Konstanta gravitasi bumi (GM) = 3986001,5 x 108 m3/detik2
Gambar I.4 menunjukkan adanya multi-receiver (minimal dua receiver) yang mengamat dua satelit GNSS secara simultan (waktu pengamatan sama). Pada proses penentuan posisi secara relatif statik ini biasanya dilakukan pengurangan data yang diamati oleh lebih dari dua receiver tersebut untuk memperoleh posisi yang lebih teliti. Hal ini karena pengurangan (differencing) ini bisa mereduksi atau mengeliminasi efek kesalahan dan bias. Kesalahan jam receiver dan jam satelit dapat dihilangkan, sedangkan kesalahan dan bias troposfer, ionosfer, dan efemeris dapat direduksi, sedangkan efek multipath tidak dapat direduksi (Abidin, 1995). Proses
16
differencing terbagi menjadi tiga metode, yakni metode single differencing, double differencing, dan triple differencing.
I.8.6.1. Single differencing. Pada metode ini dua data pengamatan one-way
dikurangkan menjadi satu data pengamatan single differencing. Satu pengamatan
one-way didefinisikan pada persamaan I.1 dan I.2 berikut (Abidin, 1995) :
Pi = ρ + dρ + 𝑑𝑡𝑟𝑜𝑝+ 𝑑𝑖𝑜𝑛+ (dt – dT) + MPi + vPi ...(I.1)
Li = ρ + dρ + 𝑑𝑡𝑟𝑜𝑝+ 𝑑𝑖𝑜𝑛+ (dt – dT) + λ.Ni + MCi + vCi ...(I.2) Dalam hal ini,
Pi : data ukuran pseudorange pada frekuensi ke-i Li : data ukuran fase pada frekuensi ke-i
ρ : jarak geometrik satelit ke pengamat
dρ : efek kesalahan orbit satelit
𝑑𝑡𝑟𝑜𝑝 : kesalahan troposphere 𝑑𝑖𝑜𝑛 : kesalahan ionosphere
dt : kesalahan jam receiver
dT : kesalahan jam satelit
MPi : efek multipath pada data pengamatan pseudorange Pi
vPi : noise pada data pengamatan pseudorange Pi
λ : panjang gelombang sinyal GNSS N : ambiguitas fase
MCi : efek multipath pada data fase Li
vCi : noise pada pada data fase Li
Berdasarkan cara pengurangannya, single differencing terbagi menjadi tiga yakni antar satelit (∇), antar pengamat (∆), dan antar kala (𝛿). Teknik single differencing
antar satelit dilakukan pada kondisi pengamatan dimana terdapat satu pengamat, dua satelit, dan satu kala. Persamaan single differencing antar satelit ditunjukkan pada persamaan I.3 dan I.4.
∇𝑃 = ∇ρ + ∇dρ + ∇𝑑𝑡𝑟𝑜𝑝 + ∇𝑑𝑖𝑜𝑛− ∇dT + ∇MP + ∇vP ...(I.3)
∇𝐿 = ∇ρ + ∇dρ + ∇𝑑𝑡𝑟𝑜𝑝− ∇𝑑𝑖𝑜𝑛 − ∇dT + λ. ∇N + ∇MC + ∇vC …..(I.4)
17 mengeliminasi kesalahan jam satelit dan mereduksi bias troposfer dan ionosfer.
Teknik single differencing antar pengamat dilakukan pada kondisi pengamatan dimana terdapat dua pengamat, satu satelit, dan satu kala. Persamaan single differencing antar pengamat ditunjukkan pada persamaan I.5 dan I.6.
∆𝑃 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝 + ∆𝑑𝑖𝑜𝑛 + ∆dt + ∆MP + ∆vP ...(I.5) ∆𝐿 = ∆ρ + ∆dρ + ∆𝑑𝑡𝑟𝑜𝑝− ∆𝑑𝑖𝑜𝑛 + ∆dt + λ. ∆N + ∆MC + ∆vC ….(I.6)
Berdasarkan persamaan I.5 dan I.6, teknik single differencing antar pengamat dapat mengeliminasi kesalahan jam satelit dan mereduksi bias troposfer dan ionosfer dengan catatan kondisi meteorologis pada kedua pengamat relatif sama.
Teknik single differencing antar kala dilakukan pada kondisi pengamatan dimana terdapat satu pengamat, satu satelit, dan dua kala. Persamaan single differencing antar pengamat ditunjukkan pada persamaan I.7 dan I.8.
𝛿𝑃 = 𝛿ρ + δdρ + 𝛿𝑑𝑡𝑟𝑜𝑝 + δ𝑑𝑖𝑜𝑛 + δdt − δdT + δMP + δvP ...(I.7) 𝛿𝐿 = 𝛿ρ + δdρ + 𝛿𝑑𝑡𝑟𝑜𝑝− δ𝑑𝑖𝑜𝑛+ δdt − δdT + δMC + δvC ...(I.8) Berdasarkan persamaan I.7 dan I.8, teknik single differencing antar kala dapat mengeliminasi kesalahan ambiguitas fase, dan mereduksi bias troposfer dan ionosfer tergantung pada besarnya selang waktu antar kala.
I.8.6.2. Double differencing. Pada metode ini dua data pengamatan single differencing dikurangkan menjadi satu data pengamatan double differencing. Berdasarkan cara pengurangannya, dikenal menjadi tiga jenis double differencing,
yakni pengamat-satelit (∆∇), satelit-kala (∆𝛿), dan pengamat-kala (∆𝛿). Teknik
double differencing antara pengamat dan satelit dilakukan pada kondisi pengamatan dimana terdapat dua pengamat, dua satelit, dan satu kala. Persamaan double differencing antara pengamat dan satelit ditunjukkan pada persamaan I.9 dan I.10.
∆∇𝑃 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝+ ∆∇𝑑𝑖𝑜𝑛+ ∆∇MP + ∆∇vP ...(I.9)
∆∇𝐿 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝− ∆∇𝑑𝑖𝑜𝑛+ λ. ∆∇N + ∆∇MC + ∆∇vC ...(I.10) Berdasarkan persamaan I.9 dan I.10, teknik double differencing antara pengamat-satelit dapat mengeliminasi kesalahan jam receiver dan jam satelit, mereduksi kesalahan orbit dan mereduksi bias troposfer dan ionosfer dengan catatan kondisi meteorologis kedua pengamat relatif sama.
18 Teknik double differencing antara satelit dan kala dilakukan pada kondisi pengamatan dimana terdapat satu pengamat, dua satelit, dan dua kala. Persamaan
double differencing antara satelit dan kala ditunjukkan pada persamaan I.11 dan I.12.
∆∇𝑃 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝+ ∆∇𝑑𝑖𝑜𝑛+ ∆∇dT + ∆∇MP + ∆∇vP ....(I.11)
∆∇𝐿 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝− ∆∇𝑑𝑖𝑜𝑛+ ∆∇dT + ∆∇MC + ∆∇vC ...(I.12)
Berdasarkan persamaan I.11 dan I.12, teknik double differencing antara satelit dan kala dapat mengeliminasi kesalahan jam receiver, mengeliminasi ambiguitas fase dengan catatan tidak ada cycle slips, dan mereduksi bias troposfer dan ionosfer tergantung besarnya selang waktu antar kala.
Teknik double differencing antara pengamat dan kala dilakukan pada kondisi pengamatan dimana terdapat dua pengamat, satu satelit, dan dua kala. Persamaan
double differencing antara satelit dan kala ditunjukkan pada persamaan I.13 dan I.14.
∆∇𝑃 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝+ ∆∇𝑑𝑖𝑜𝑛+ ∆∇dt + ∆∇MP + ∆∇vP ...(I.13) ∆∇𝐿 = ∆∇ρ + ∆∇dρ + ∆∇𝑑𝑡𝑟𝑜𝑝− ∆∇𝑑𝑖𝑜𝑛+ ∆∇dt + ∆∇MC + ∆∇vC ...(I.14) Berdasarkan persamaan I.13 dan I.14, teknik double differencing antara pengamat dan kala dapat mengeliminasi kesalahan jam satelit, mengeliminasi ambiguitas fase dengan catatan tidak ada cycle slips, mereduksi kesalahan orbit, dan mereduksi bias troposfer dan ionosfer.
I.8.6.3. Triple differencing. Pada metode ini dua data pengamatan double differencing dikurangkan menjadi satu data pengamatan triple differencing. Dalam hal ini delapan data one-way dikurangkan menjadi satu pengamatan triple differencing. Berdasarkan cara pengurangannya, dikenal menjadi satu jenis triple differencing, yakni pengamat-satelit-kala (∆∇δ). Teknik triple differencing antara pengamat, satelit, dan kala dilakukan pada kondisi pengamatan dimana terdapat dua pengamat, dua satelit, dan dua kala. Persamaan triple differencing antara pengamat, satelit, dan kala ditunjukkan pada persamaan I.15 dan I.16.
∆∇δ𝑃 = ∆∇δρ + ∆∇δdρ + ∆∇δ𝑑𝑡𝑟𝑜𝑝+ ∆∇δ𝑑𝑖𝑜𝑛+ ∆∇δMP + ∆∇δvP ....(I.15)
∆∇δ𝐿 = ∆∇δρ + ∆∇δdρ + ∆∇δ𝑑𝑡𝑟𝑜𝑝− ∆∇δ𝑑𝑖𝑜𝑛+ ∆∇δMC + ∆∇δvC ...(I.16) Berdasarkan persamaan I.15 dan I.16, teknik triple differencing antara pengamat, satelit, dan kala dapat mengeliminasi kesalahan jam receiver dan jam satelit, mengeliminasi ambiguitas fase dengan catatan tidak ada cycle slips, mereduksi
19 kesalahan orbit, dan mereduksi bias troposfer dan ionosfer. Teknik ini sering dipakai untuk mengedit cycle slips secara otomatis.
I.8.7. Pengolahan Data Pengamatan GNSS-CORS dengan GAMIT/GLOBK GAMIT/GLOBK adalah sebuah paket perangkat lunak komprehensif untuk analisis data GPS yang dikembangkan oleh Masshachusstes Institute of Technology
(MIT), Harvard-Simthsonian Center for Astrophysics (CfA) dan Scripps Institution of Oceanography (SIO). GAMIT/GLOBK terdiri dari dua program utama, yakni GAMIT dan GLOBK. GAMIT adalah singkatan dari GPS Analysis of Masshachusstes Institute of Technology. GAMIT adalah program yang memasukkan algorithma hitung kuadrat terkecil metode parameter berbobot untuk mengestimasi posisi relatif dari sekumpulan stasiun, parameter orbit dan rotasi bumi, zenith delay
dan ambiguitas fase melalui pengamatan double difference (Anonim, 2000).
Perangkat lunak ini didesain untuk running dalam sistem operasi berbasis UNIX. Perangkat lunak ini melibatkan bahasa Fortran atau C untuk proses compile di direktori /libraries, /gamit dan /kf . Pada perkembangan terakhir, GAMIT menjadi perangkat lunak ilmiah fully automatic processing pada pertengahan 1990 yang menyertakan data stasiun-stasiun kontinyu di seluruh dunia diantaranya IGS (Anonim, 2000).
GLOBK adalah paket program yang menerapkan algorithma Kalman Filtering
untuk mengkombinasikan hasil pemrosesan data survei terestris ataupun data survei ekstra terestris, sehingga dapat menghasilkan koordinat posisi stasiun dan
kecepatannya. Kunci dari data input pada GLOBK adalah matriks kovarian dari data koordinat stasiun, parameter rotasi bumi, parameter orbit, dan koordinat hasil
pengamatan lapangan (Herring, dkk., 2006). Sebagai file input digunakan H-Files
hasil pengolahan dengan GAMIT. Namun selain hasil pengolahan GAMIT, GLOBK juga dapat menerima input file hasil pengolahan dari perangkat lunak ilmiah lain, misal : GIPSY dan Bernesse (Herring, dkk., 2006). Terdapat tiga moda aplikasi yang dapat dijalankan dengan menggunakan GLOBK, yaitu :
a. Mengkombinasikan hasil pengolahan individual (misal: harian) untuk menghasilkan koordinat stasiun rata-rata dari pengamatan yang dilakukan lebih dari satu hari (multidays);
20 b. Mengkombinasikan hasil pengamatan selama bertahun-tahun untuk
menghasilkan koordinat stasiun;
c. Melakukan estimasi koordinat stasiun dari pengamatan individual, yang digunakan untuk menggeneralisasikan data runut waktu (time series) dari pengamatan teliti harian atau tahunan.
I.8.7.1. Perataan Jaring dengan GAMIT. Pengolahan data GNSS menggunakan perataan jaring GPS dengan hitung perataan kuadrat terkecil metode parameter berbobot (weighted constraint) kemudian dilanjutkan dengan Kalman Filtering untuk mendapatkan nilai estimasi koordinat stasiun. Metode hitung perataan parameter berbobot ini diterapkan pada perangkat lunak GAMIT. Metode hitungan ini memakai data pseudorange dan carrier phase dan juga memakai metode diferensial double differencing atau triple differencing. Dalam hal ini, metode double difference
pengamat-satelit pada sub-bab I.8.6.2 dipakai sebagai persamaan observasi. Pada kondisi pengamatan double difference pengamat-satelit, terdapat dua receiver pada stasiun A dan B, dengan vektor kordinat stasiun A dan B dinyatakan sebagai (XA, YA, ZA) dan (XB, YB, ZB), stasiun A ditentukan koordinatnya. Untuk persamaan double difference, pengamatan dilakukan terhadap empat satelit yaitu i ,j,k,dan l, sehingga didapatkan 8 persamaan jarak ρiA ,ρjA ,ρkA ,ρlA ,ρiB ,ρjB ,ρkB , dan ρlB yang secara umum
mengikuti persamaan umum yang disajikan pada persamaan I.17 berikut (Rizos, 1997) :
𝜌𝐴𝑖 = √[𝑋𝑖(𝑡) − 𝑋
𝐴]2+ [𝑌𝑖(𝑡) − 𝑌𝐴]2+[𝑍𝑖(𝑡) − 𝑍𝐴]2..... (I.17)
Dalam hal ini,
i : notasi untuk satelit ke-n A : notasi untuk stasiun ke-m
Nilai pendekatan bagi koordinat stasiun A ditetapkan sebagai (XA0,YA0, ZA0), sehingga persamaan koreksi stasiun A berubah menjadi persamaan I.18 s.d. I.20 berikut ini.
XA = XA0 + dXA...... (I.18)
YA = YA0 + dYA...... (I.19) ZA = ZA0 + dZA...... (I.20) Dalam menyelesaikan persamaan I.17, maka dilakukan proses linierisasi dengan deret Taylor, sehingga mengasilkan delapan persamaan linierisasi bagi jarak ρAi(t),
21
ρAj
(t), ρAk(t), ρAl(t), ρBi(t), ρBj(t), ρBk(t),dan ρBl(t) yang secara umum mengikuti persamaan I.21 berikut :
𝜌𝐴𝑖(𝑡) = 𝜌
𝐴𝑖0+ 𝑐𝑥𝑖(𝑡). 𝑑𝑋𝐴+ 𝑐𝑦𝑖(𝑡). 𝑑𝑌𝐴+ 𝑐𝑧𝑖(𝑡). 𝑑𝑍𝐴... (I.21)
Dalam hal ini,
i : notasi untuk satelit ke-n
i0 : notasi nilai pendekatan jarak antara satelit ke-n dengan stasiun ke-m A : notasi untuk stasiun ke-m
cx : differensial parsial persamaan terhadap dX cy : differensial parsial persamaan terhadap dY cz : differensial parsial persamaan terhadap dZ
Pembentukan matriks bobot pengamatan sendiri mengacu pada penurunan rumus bobot pengamatan carrier phase secara double difference oleh Popovas dan Radzeviviute (2001). Dalam hal ini, dibentuk tiga persamaan double difference
dengan stasiun A sebagai stasiun acuan dan satelit i sebagai satelit acuan dalam proses double difference. Tiga persamaan tersebut ditunjukkan pada persaman I.22 s.d. I.24berikut (Popovas dan Radzeviviute, 2001) :
∆∇𝐿𝐴𝐵𝑖𝑗 (𝑡) = 𝜌𝐵𝑗(𝑡) − 𝜌𝐴𝑗(𝑡) − 𝜌𝐵𝑖(𝑡) + 𝜌 𝐴𝑖(𝑡)... (I.22) ∆∇𝐿𝐴𝐵𝑖𝑘 (𝑡) = 𝜌 𝐵𝑘(𝑡) − 𝜌𝐴𝑘(𝑡) − 𝜌𝐵𝑖(𝑡) + 𝜌𝐴𝑖(𝑡)... (I.23) ∆∇𝐿𝐴𝐵𝑖𝑙 (𝑡) = 𝜌 𝐵𝑙(𝑡) − 𝜌𝐴𝑙(𝑡) − 𝜌𝐵𝑖(𝑡) + 𝜌𝐴𝑖(𝑡)... (I.24)
Berdasarkan persamaan I.22 s.d. I.24, kemudian dibentuk matriks desain seperti ditunjukkan persamaan I.25 s.d. I.27 berikut :
𝐶 = [1 −11 0 −1 0 1 0 0 0 −1 1 0 −1 0 −1 −1 0 0 01 0 0 1 ] ... (I.25) 𝜌 = [𝜌𝐴𝑖(𝑡) 𝜌 𝐴𝑗(𝑡) 𝜌𝐴𝑘(𝑡) 𝜌𝐴𝑙(𝑡) 𝜌𝐵𝑖(𝑡) 𝜌𝐵𝑗(𝑡) 𝜌𝐵𝑘(𝑡) 𝜌𝐵𝑙(𝑡)] 𝑇 ... (I.26) 𝐷𝐷 = [ ∆∇𝐿𝑖𝑗𝐴𝐵(𝑡) ∆∇𝐿𝑖𝑘𝐴𝐵(𝑡) ∆∇𝐿𝑖𝑙𝐴𝐵(𝑡) ] ... (I.27)
Dalam hal ini,
22
ρ : matriks yang berisi besaran jarak
DD : matriks yang berisi besaran double difference
Matriks kovarian mengikuti persamaan cov(DD) = Ccov(ρ)CT. Selanjutnya persamaan tersebut disederhanakan menjadi cov(DD) = σ2CCT, karena adanya fase yang tidak berkorelasi. Matriks CCT yang dihasilkan ditunjukkan pada persamaan I.28 berikut :
𝐶𝐶𝑇 = [4 2 22 4 2 2 2 4
] ... (I.28) Adapun matriks bobot pengamatan (P1) dirumuskan sebagai inverse dari matriks
CCT, yakni 𝑃1 = (𝐶𝐶𝑇)−1, sehingga matriks bobotnya seperti disajikan pada persamaan I.29 berikut :
𝑃1 =18[−1 3 −1 3 −1 −1 −1 −1 3
] ... (I.29) Faktor ambiguitas pada fase (𝑁𝐴𝐵𝑖𝑗) dan faktor noise (rC𝐴𝐵𝑖𝑗 ) pada pengukuran jarak kemudian ditambahkan pada persamaan I.22 s.d. I.24, sehingga diperoleh persamaan I.30 s.d. I.32 berikut ini :
∆∇𝐿𝐴𝐵𝑖𝑗 (𝑡) + ∆∇rC𝐴𝐵𝑖𝑗 (𝑡) = 𝜌𝐵𝑗(𝑡) − 𝜌𝐴𝑗(𝑡) − 𝜌𝐵𝑖(𝑡) + 𝜌𝐴𝑖(𝑡) − 𝜆. ∆∇𝑁𝐴𝐵𝑖𝑗... (I.30) ∆∇𝐿𝐴𝐵𝑖𝑘 (𝑡) + ∆∇rC
𝐴𝐵𝑖𝑘(𝑡) = 𝜌𝐵𝑘(𝑡) − 𝜌𝐴𝑘(𝑡) − 𝜌𝐵𝑖(𝑡) + 𝜌𝐴𝑖(𝑡) − 𝜆. ∆∇𝑁𝐴𝐵𝑖𝑘... (I.31) ∆∇𝐿𝐴𝐵𝑖𝑙 (𝑡) + ∆∇rC
𝐴𝐵𝑖𝑙 (𝑡) = 𝜌𝐵𝑙(𝑡) − 𝜌𝐴𝑙(𝑡) − 𝜌𝐵𝑖(𝑡) + 𝜌𝐴𝑖(𝑡) − 𝜆. ∆∇𝑁𝐴𝐵𝑖𝑙 ... (I.32)
Selanjutnya dengan menggunakan penyelesaian double differencing dihasilkan persamaan I.33 s.d. I.35 berikut :
∆∇𝐿𝐴𝐵𝑖𝑗 (𝑡) + ∆∇rC𝐴𝐵𝑖𝑗(𝑡) = ∆∇𝜌𝐴𝐵𝑖𝑗 0 (𝑡) − ∇𝑐𝑥𝑖𝑗(𝑡). 𝑑𝑋 𝐴+ ∇𝑐𝑦𝑖𝑗(𝑡). 𝑑𝑌𝐴+ ∇𝑐𝑧𝑖𝑗(𝑡). 𝑑𝑍𝐴− 𝜆. ∆∇𝑁𝐴𝐵𝑖𝑗 ... (I.33) ∆∇𝐿𝐴𝐵𝑖𝑘(𝑡) + ∆∇rC𝐴𝐵𝑖𝑘(𝑡) = ∆∇𝜌𝐴𝐵𝑖𝑘 0 (𝑡) − ∇𝑐𝑥𝑖𝑘(𝑡). 𝑑𝑋 𝐴+ ∇𝑐𝑦𝑖𝑘(𝑡). 𝑑𝑌𝐴+ ∇𝑐𝑧𝑖𝑘(𝑡). 𝑑𝑍𝐴− 𝜆. ∆∇𝑁𝐴𝐵𝑖𝑘 ... (I.34) ∆∇𝐿𝐴𝐵𝑖𝑙 (𝑡) + ∆∇rC𝐴𝐵𝑖𝑙 (𝑡) = ∆∇𝜌𝐴𝐵𝑖𝑙0(𝑡) − ∇𝑐𝑥𝑖𝑙(𝑡). 𝑑𝑋𝐴+ ∇𝑐𝑦𝑖𝑙(𝑡). 𝑑𝑌𝐴+ ∇𝑐𝑧𝑖𝑙(𝑡). 𝑑𝑍𝐴− 𝜆. ∆∇𝑁𝐴𝐵𝑖𝑙 ... (I.35) Dalam hal ini,
∇𝑐𝑥𝐴𝑛𝑚(𝑡) = + 𝑋𝑚(𝑡)−𝑋 𝐴 𝜌𝐴𝑚(𝑡) − 𝑋𝑛(𝑡)−𝑋 𝐴 𝜌𝐴𝑛(𝑡) ; n, m = satelit ke n, m
23 ∇𝑐𝑦𝐴𝑛𝑚(𝑡) = + 𝑌𝑚(𝑡)−𝑌 𝐴 𝜌𝐴𝑚(𝑡) − 𝑌𝑛(𝑡)−𝑌 𝐴 𝜌𝐴𝑛(𝑡) ; n, m = satelit ke n, m ∇𝑐𝑧𝐴𝑛𝑚(𝑡) = + 𝑍𝑚(𝑡)−𝑍𝐴 𝜌𝐴𝑚(𝑡) − 𝑍𝑛(𝑡)−𝑍𝐴 𝜌𝐴𝑛(𝑡) ; n, m = satelit ke n, m
Persamaan double difference antara pengamat dan satelit pada persamaan I.33 s.d. I.35 ini menggunakan data beda fase. Selanjutnya, dilakukan hitung kuadrat terkecil metode parameter berbobot untuk mendapatkan posisi pengamat A.
Hitung perataan metode berbobot melibatkan parameter yang juga dianggap sebagai ukuran karena memiliki kesalahan. Bobot dalam metode ini terdiri atas dua, yakni bobot ukuran data fase dan bobot parameter yang berisi 1/varian komponen koordinat. Dalam metode ini dikenal dua jenis persamaan pengukuran L1a = F1(xa)
dan L2a = F2(xa). Persamaan pengukuran L2a = F2(xa) merupakan persamaan yang mengandung suatu parameter yang sudah diketahui/diukur sebelumnya, misalnya pada xa sebelumnya telah dilakukan pengukuran GPS dengan menghasilkan koordinat (XA, YA, ZA) dan ketelitiannya. Oleh karena bentuk A2 merupakan bentuk
yang linier sehingga persamaan menjadi L2a = xa. Adapun L1a = F1(xa) adalah
persamaan yang mengandung ukuran murni, dalam hal ini adalah data fase.
Model non-linier dari persamaan metode parameter berbobot disajikan pada persamaan I.36 dan I.37 (Soeta’at, 1996) :
L1a = F1(xa) ... (I.36) L2a = xa ... (I.37)
Adapun bentuk liniernya disajikan pada persamaan I.38 berikut :
2 2 2 1 1 1 L x A V L x A V ……...………... (I.38) Model stokastik ditunjukkan oleh matriks bobot P1 dan P2, dan dengan pemilihan elemen A2 dan P2 yang tepat, maka bisa diperoleh solusi yang dinginkan. Fungsi F2
merupakan fungsi linier, sehingga A2 = I, ini yang disebut parameter berbobot.
Selanjutnya, persamaan I.37 berubah menjadi persamaan I.39 berikut :
b b b a a x x L x L x L 0 2 2 2 ………... (I.39)
24 Dalam hal ini, x0 = pendekatan dan xb = pengukuran. Pada awalnya, x0 diberi nilai sama dengan xb, kemudian selama iterasi x0 menjadi konvergen ke solusi akhir,
sedang xb tetap tidak berubah.
Matriks A, V, L, dan P didefinisikan seperti persamaan I.40 :
2 1 A A A 2 1 V V V 2 1 L L L 0 1 P P 2 0 P ………... (I.40)
Hasil pendefinisian pada persamaan I.40 mengubah persamaan I.38 menjadi persamaan I.41 berikut :
2 1 2 1 2 1 L L x A A V V ………... (I.41) Dalam mengestimasi nilai parameter 𝑥̃, dilakukan dengan prinsip inversi matriks pada persamaan I.38 dengan menambahkan matriks bobot P, sehingga persamaan untuk memperoleh parameter ditunjukkan pada persamaan I.42 dan I.43 berikut:
A PA
AP L
xˆ T 1 T ……... (I.42) 𝑥̃ 2 1 2 1 2 1 1 2 1 2 1 2 1 0 0 0 0 L L P P A A A A P P A AT T T T ……... (I.43)Seperti disebutkan sebelumnya bahwa A2= I, sehingga persamaan untuk
mengestimasi nilai parameter berubah menjadi persamaan I.44 berikut :
1 1 1 2 2
1 2 1 1 1 ˆ A P A P A P L P L x T T ...………...…... (I.44) Matriks bobot P1 seperti yang dituliskan pada persamaan 13. Adapun P2 adalah matriks bobot yang dibentuk dari informasi ketelitian yang diwakili oleh varian (constraint) yang ada pada suatu koordinat stasiun yang dijadikan parameter.1 𝜎𝑋𝑎2 ⁄ 0 0 0 1 𝜎𝑋𝑎2 ⁄ 0 0 0 1 𝜎 𝑋𝑎2 ⁄ 0 0 0
Dengan demikian matriks A1, L1, A2, L2 , dan 𝑥̃ dapat disajikan pada persamaan I.46 s.d. I.49 berikut :
25 𝐴1 = [ ∇𝑐𝑥𝑖𝑗(𝑡) ∇𝑐𝑦𝑖𝑗(𝑡) ∇𝑐𝑧𝑖𝑗(𝑡) ∇𝑐𝑥𝑖𝑘(𝑡) ∇𝑐𝑦𝑖𝑘(𝑡) ∇𝑐𝑧𝑖𝑘(𝑡) ∇𝑐𝑥𝑖𝑙(𝑡) ∇𝑐𝑦𝑖𝑘(𝑡) ∇𝑐𝑧𝑖𝑙(𝑡) −𝜆 0 0 −𝜆0 00 0 −𝜆 ]... (I.46)
𝐿
1= [
∆∇𝐿
𝐴𝐵𝑖𝑗(𝑡) −
∆∇𝜌𝐴𝐵𝑖𝑗0(
𝑡)
∆∇𝐿
𝐴𝐵𝑖𝑘(𝑡) −
∆∇𝜌 𝐴𝐵 𝑖𝑘0(
𝑡)
∆∇𝐿
𝐴𝐵𝑖𝑙(𝑡) −
∆∇𝜌 𝐴𝐵 𝑖𝑙0(
𝑡)
]
... (I.47) 𝑥̃ = [ 𝑑𝑋𝐴 𝑑𝑌𝐴 𝑑𝑍𝐴 ∆∇𝑁𝐴𝐵𝑖𝑗 ∆∇𝑁𝐴𝐵𝑖𝑘 ∆∇𝑁𝐴𝐵𝑖𝑙 ] ... (I.48) 𝐿2 = [ 𝑋0− 𝑋𝐴 𝑌0 − 𝑌𝐴 𝑍0 − 𝑍𝐴 0 ] ... (I.49)Dalam hal ini,
V : Matriks residu
P : Matriks bobot
A : Matriks desain
𝑥̃ : Matriks parameter
∆∇𝜌𝐴𝐵𝑛𝑚0(𝑡) : Jarak satelit-pengamat pendekatan ; n, m = satelit ke n, m ∆∇𝐿𝑖𝑗𝐴𝐵(𝑡) : Matriks ukuran
∆∇𝑁𝐴𝐵𝑛𝑚 : Nilai ambiguitas fase integer (bulat) yang belum diketahui
Penyelesaian hitungan untuk memperoleh nilai parameter pada matriks 𝑥̃ adalah dengan persamaan I.44. Hasil pengolahan data pengamatan menggunakan GAMIT berupa solusi bias-fixed dan bias-free. Solusi ini didapatkan dari perhitungan double difference data beda fase yang dilakukan dua kali, yaitu dengan ambiguity-fixed dan
ambiguity-float. Hasil hitungan parameter ini disimpan pada H-Files. Pengolahan ini disebut juga sebagai pengolahan secara loosely constraint. Dalam mendapatkan koordinat akhir, maka solusi loosely constraint GAMIT ini diikatkan pada kerangka ITRF dalam GLOBK.
26 I.8.7.2. Perataan jaring berbasis Kalman Filtering pada modul GLOBK. GLOBK merupakan proses Kalman Filtering untuk mengkombinasikan solusi-solusi hasil pengolahan data primer hasil pengamatan terestris maupun ekstra-terestris (space geodesy). Kalman Filtering adalah suatu metode estimasi parameter dengan kuadrat terkecil yang mampu menyelesaikan masalah terkait waktu. Kunci dari metode ini adalah updating. Proses ini merupakan proses dimana jika terdapat pengamatan baru pada titik-titik yang sama, maka pengamatan baru tersebut akan mengubah estimasi parameter hasil hitungan perataan yang sudah dilakukan. Perubahan tersebut dihitung untuk memperoleh estimasi parameter yang baru. Nilai estimasi yang baru tersebut bisa dinyatakan dalam bentuk persamaan I.50 berikut (Strang and Borre, 1997) :
𝑥̃𝑛𝑒𝑤 = 𝐿𝑥̃𝑜𝑙𝑑+ 𝐾𝑏𝑛𝑒𝑤... (I.50)
Kunci dari metode Kalman Filtering ada empat butir, yaitu :
1. Prosesnya bersifat rekursif, artinya pengamatan yang lama tidak disimpan sebagai 𝑏𝑜𝑙𝑑, karena sudah digunakan pada estimasi 𝑥̃𝑜𝑙𝑑
2. Persamaan I.50 dapat diturunkan menjadi persamaan baru yang ekivalen dengan memisahkan nilai prediksi dan koreksi seperti pada persamaan I.51 berikut :
𝑥̃𝑛𝑒𝑤 = 𝑥̃𝑜𝑙𝑑+ 𝐾(𝑏𝑛𝑒𝑤− 𝐴𝑛𝑒𝑤𝑥̃𝑜𝑙𝑑) ... (I.51)
Berdasarkan persamaan 2, dapat diketahui bahwa pengukuran prediksi
𝐴𝑛𝑒𝑤𝑥̃𝑜𝑙𝑑 dapat diperoleh dari estimasi parameter 𝑥̃𝑜𝑙𝑑, sedangkan koreksi 𝑥̃ adalah besarnya nilai 𝐾(𝑏𝑛𝑒𝑤− 𝐴𝑥̃𝑜𝑙𝑑).
3. Proses updating matriks kovarian P. Matriks kovarian P adalah matriks kovarian kesalahan dari parameter estimasi 𝑥̃ (𝑃 = (𝐴𝑇∑ 𝐴)𝑒 −1). Matriks P
dinyatakan sebagai nilai statistik 𝑥̃ berdasarkan nilai 𝑏. Matriks P atau matriks kovarian kesalahan dari parameter 𝑥̃ ini yang dilakukan updating,
apabila ada penambahan pengukuran 𝑏𝑛𝑒𝑤 dengan kesalahan pengukuran Σe,
new , sehingga Pnew bisa disajikan seperti pada persamaan I.52 berikut:
𝑃𝑛𝑒𝑤 = (𝐼 − 𝐾𝐴)𝑃𝑜𝑙𝑑(𝐼 − 𝐾𝐴)𝑇+ 𝐾 ∑ 𝐾𝑇
𝑒,𝑛𝑒𝑤 ... (I.52)
4. Pada butir 1,2, 3 masih menggambarkan problem kuadrat terkecil yang bersifat statis, sedangkan dengan Kalman Filtering kuadrat terkecil dipakai
27 untuk problem dinamis. Sebagai contoh, pada penentuan posisi GPS, posisi saat k (xk) belum tentu sama dengan posisi saat k-1 (xk-1) yang memiliki kesalahan sebesar 𝜀𝑘 seperti ditunjukkan pada persamaan I.53 berikut :
𝑥𝑘 = 𝐹𝑘−1𝑥𝑘−1+ 𝜀𝑘... (I.53) Adapun persamaan pengukuran yang baru dengan masukan kondisi baru 𝑥𝑘
dan pengukuran baru 𝑏𝑘, serta kesalahan 𝑒𝑘 seperti ditunjukkan pada persamaan I.54 berikut :
𝑏𝑘 = 𝐴𝑘𝑥𝑘+ 𝑒𝑘... (I.54) Persamaan I.52 s.d. I.54 menunjukkan bahwa proses updating terdiri atas dua tahap yaitu prediksi dan koreksi. Konsep-konsep metode Kalman Filtering
inilah yang dipakai dalam proses pengolahan dengan modul GLOBK.
Dalam modul GLOBK sendiri terdapat tiga program utama, yaitu GLRED, GLORG, dan GLOBK. GLOBK mengkombinasikan data pengolahan harian GAMIT untuk mendapatkan estimasi posisi rata-rata titik pengamatan. Pengikatan titik-titik pengamatan terhadap titik-titik referensi dilakukan dengan GLORG, GLRED hampir sama dengan GLOBK, bedanya GLRED memperlakukan H-Files dari masing-masing hari secara terpisah, sehingga ketelitian posisi yang diperoleh dapat digabungkan per waktu tertentu (Herring, dkk., 2006).
I.8.7.3.Evaluasi hasil pengolahan dengan GAMIT. Evaluasi hasil pengolahan dengan menggunakan perangkat lunak GAMIT dapat dilakukan dengan memperhatikan dua parameter evaluasi GAMIT, yaitu nilai postfit nrms dan nilai
fract (Herring, 2010).
1. Postfit nrms (normalized root mean square). Nilai postfit nrms ditentukan dengan persamaan I.55 :
Postfit nrms = √ √𝑥 2 (𝑛−𝑢) = 𝑐ℎ𝑖−𝑠𝑞𝑢𝑎𝑟𝑒 𝑑𝑒𝑔𝑟𝑒𝑒 𝑜𝑓 𝑓𝑟𝑒𝑒𝑑𝑜𝑚... (I.55) Dengan nilai 𝑥2 =𝜕𝑜 2 𝜃𝑜2... (I.56)
Dalam hal ini,
𝜕𝑜2 : varian apriori untuk unit bobot 𝜃𝑜2 : varian aposteori untuk unit bobot
28
𝑛 : jumlah ukuran
𝑢 : ukuran minimum
Berdasarkan persamaan 1.55 dan I.56 dapat diketahui bahwa nilai nrms adalah akar dari perbandingan antara varian aposteori dan varian apriori untuk unit bobot tertentu. Standar kualitas nilai postfit nrms pada GAMIT adalah berkisar ± 0,25, jika nilainya lebih besar dari 0,5, maka masih terdapat cycle slips yang belum dihilangkan atau berkaitan dengan parameter bias ekstra ataupun bisa juga karena terdapat kesalahan dalam melakukan pemodelan (Anonim, 2000).
2. Fract. Fract merupakan hasil perbandingan antara nilai adjust dan nilai
formal. Nilai fract dapat digunakan untuk mengidentifikasi apakah ada nilai adjust
yang janggal dan perlu tidaknya diberikan iterasi untuk mendapatkan nilai adjust
yang bebas dari efek non-linear. Nilai adjust menunjukkan besarnya perataan yang diberikan terhadap parameter yang digunakan dalam perhitungan. Nilai formal
disebut juga nilai formal error. Nilai formal menunjukkan ketidakpastian pada pemberian data bobot untuk perhitungan kuadrat terkecil. Sesuai standar GAMIT, besarnya nilai fract tidak boleh lebih dari 10 (fract < 10)(Herring, dkk., 2006). Nilai
fract diperoleh dari persamaan I.57.
𝑓𝑟𝑎𝑐𝑡 =
𝑓𝑜𝑟𝑚𝑎𝑙𝑎𝑑𝑗𝑢𝑠𝑡 ... (I.57)I.8.7.4. Evaluasi hasil pengolahan dengan GLOBK. Hasil pengolahan pada GLOBK dapat dievaluasi melalui log file yang berisi nilai simpangan baku yang dapat digunakan untuk menganalisis koordinat stasiun observasi dan nilai chi-square per degree of freedom. Selain itu, dilakukan pula analisis pada plot time series untuk mengetahui outliers yang terjadi dan konsistensi data harian. Nilai wrms juga digunakan untuk mengevaluasi hasil dari pengolahan GLOBK. Menurut Panuntun (2012), nilai wrms yang baik adalah di bawah 10 mm.
I.8.8. Perhitungan Kecepatan Pergeseran Stasiun
Besar kecepatan pergeseran stasiun GNSS dihitung menggunakan prinsip
Kalman Filtering dalam GLOBK pada sub-bab I.8.7.2 dengan persamaan I.58 berikut (Panuntun, 2012) :
29 Dalam hal ini,
Xti : koordinat stasiun pengamatan pada epok ti Xt0 : koordinat stasiun pengamatan pada eopk t0 v : kecepatan pergerseran stasiun
Resultan vektor pergeseran stasiun selanjutnya dihitung dengan persamaan I.59 :
𝑉𝑅 = 𝑉𝑁+ 𝑉𝐸 ... (I.59)
Dalam hal ini,
VR : resultan kecepatan pergeseran stasiun
VN : kecepatan pergeseran stasiun pada komponen North VE : kecepatan pergeseran stasiun pada komponen East
Adapun arah vektor pergeseran stasiun selanjutnya dihitung dengan persamaan I.60 :
𝛼 = 𝑡𝑎𝑛
𝑣𝑒𝑣𝑛 ... (I.60)
Dalam hal ini,
α : arah vektor pergeseran horizontal stasiun I.8.9. Analisis Regangan 3D
1.8.9.1 Konsep Regangan. Istilah regangan terkait dengan istilah tegangan, pergeseran, dan perubahan bentuk. Sebuah gaya tegangan (stress) yang bekerja pada sebuah benda menyebabkan terjadinya perubahan panjang dan arah relatif (regangan/strain), kemudian kumpulan regangan pada benda menyebabkan terjadinya perubahan posisi (pergeseran/displacement), sebagai hasil dari perubahan posisi ini adalah terjadinya perubahan ukuran dan bentuk pada suatu benda (size and shape changes).
Regangan adalah deformasi yang terjadi per unit panjang suatu materi (Widjajanti, 1997). Regangan digambarkan dalam bentuk tensor, yakni suatu vektor yang mempertimbangkan kerangka waktu. Regangan terdiri atas dua jenis, yakni regangan normal (e) dan regangan geser (γ). Regangan normal (extensional strain) adalah perubahan ukuran panjang (penambahan panjang) benda sepanjang arah yang spesifik (searah sumbu benda). Sedangkan regangan geser adalah perubahan sudut antara dua arah yang spesifik (Sadd, 2005). Regangan geser ini menyebabkan deformasi sudut/dilatasi. Berikut disajikan regangan normal (Gambar 1.5) dan
30 regangan geser (Gambar 1.6 dan 1.7).
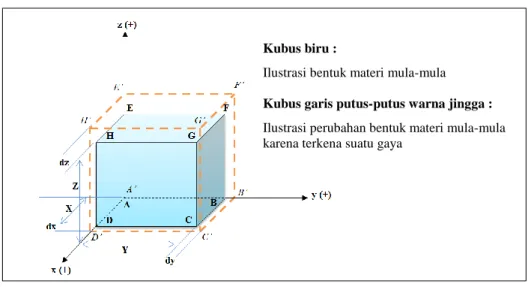
Gambar I.5. Ilustrasi regangan normal pada ruang 3D
Pada Gambar I.5 diketahui bahwa suatu materi mula-mula berbentuk kubus (warna biru) kemudian karena bekerja suatu gaya sehingga bertambah volumenya (warna jingga). Panjang asal suatu materi dinyatakan dalam X dan Y, dengan masing-masing penambahan panjang dx dan dy. Apabila (u, v, w) merupakan komponen perpindahan dari sebuah titik A pada arah masing-masing sumbu X, Y, dan Z yang melewati suatu titik lain, maka pertambahan panjang elemen AD pada sumbu X dinyatakan dalam satuan penambahan panjang (δu/δx) dan dapat dinyatakan dalam persamaan I.61 :
𝑒𝑥𝑥 = (𝐴′𝐷𝐴𝐷′−𝐴𝐷)= ((𝑋+𝑑𝑥)−𝑋)𝑋 =𝛿𝑥 𝛿𝑢 ... (I.61) Dengan cara yang sama, satuan perpanjangan AB dalam sumbu Y dinyatakan dalam persamaan I.62 :
𝑒𝑦𝑦 = (𝐴′𝐵𝐴𝐵′−𝐴𝐵)=((𝑌+𝑑𝑦)−𝑌)𝑌 =𝛿𝑦𝛿𝑣 ... (I.62) Jika terdapat satu elemen pada sumbu Z, maka perpanjangan titik A searah sumbu Z diperoleh persamaan I.63 :
𝑒𝑧𝑧 =(𝐴 ′𝐸′−𝐴𝐸) 𝐴𝐸 = ((𝑍+𝑑𝑧)−𝑍) 𝑍 = 𝛿𝑤 𝛿𝑧 ... (I.63)
Satuan perpanjangan exx, eyy, ezz disebut dengan parameter regangan normal. Masing-masing parameter tersebut dinyatakan dalam perbandingan perubahan panjang terhadap panjang aslinya (Widjajanti, 1997). Dalam meninjau kejadian
Kubus biru :
Ilustrasi bentuk materi mula-mula
Kubus garis putus-putus warna jingga : Ilustrasi perubahan bentuk materi mula-mula karena terkena suatu gaya
31 regangan geser, disajikanlah Gambar I.6 dan I.7.
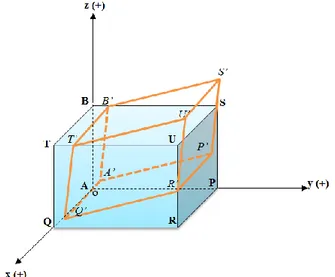
Gambar I.6. Ilustrasi regangan geser dalam ruang 3D
Gambar I.7. Ilustrasi proyeksi regangan geser dalam ruang 3D pada bidang XY Gambar 1.6 dan 1.7 menunjukkan suatu materi terjadi deformasi sudut (dilatasi) atau yang disebut dengan regangan geser. Pada Gambar I.6 suatu benda mula-mula berbentuk balok APRQ.BSUT (warna biru), kemudian karena adanya gaya benda terdeformasi sudutnya menjadi bangun A’P’R’Q’.B’S’U’T’ (warna jingga). Pada Gambar I.7 menunjukkan proyeksi deformasi sudut suatu benda pada bidang XY. Mula-mula benda berbentuk persegi panjang (warna merah), kemudian terdeformasi menjadi jajaran genjang (warna biru). Sebuah elemen garis AP dan AQ
32 mengalami distorsi sudut masing-masing terhadap sumbu Y dan X menjadi A’P’ dan A’Q’. Jika γ1 adalah sudut apit antara garis A’P’ dengan sumbu Y dan γ2 adalah sudut apit antara A’Q’ dengan sumbu X dengan asumsi masing-masing γ1 dan γ2 bernilai kecil. Nilai γ1 diperoleh dengan persamaan I.64 dan I.65 :
𝑡𝑎𝑛(𝛾1) = 𝛿𝑢/𝛿𝑦
1+(𝛿𝑣𝛿𝑦) ... (I.64) 𝛾1= 𝛿𝑢/𝛿𝑦 ... (I.65)
Dengan cara yang sama, sudut γ2 diperoleh dengan persaman I.66:
𝛾2 = 𝛿𝑣/𝛿𝑥 ... (I.66)
Dengan demikian diperoleh perpindahan titik P searah sumbu X dan titik Q searah sumbu Y seperti pada persamaan I.67 dan I.68:
𝑃′ = 𝑢 + (𝛿𝑢
𝛿𝑦) 𝑑𝑦 ... (I.67) 𝑄′= 𝑣 + (𝛿𝑣
𝛿𝑥) 𝑑𝑥 ... (I.68)
Berdasarkan Gambar I.9 didapati bahwa dengan asumsi γ1 = γ2, sudut PAQ berkurang sebesar (γ1+ γ2) menjadi sudut P’A’Q’ yang besarnya adalah (90-( γ1+ γ2)). Dengan demikian, sudut exy yang merupakan regangan geser dari bidang XZ dan YZ dinyatakan dalam persamaan 1.69 dan 1.70 :
2𝑒𝑥𝑦 = 𝛾1+ 𝛾2 = 𝛿𝑢𝛿𝑦+𝛿𝑥𝛿𝑣 ... (I.69) 𝑒𝑥𝑦 =12(𝛿𝑢𝛿𝑦+𝛿𝑣𝛿𝑥) = 1/2𝛾𝑥𝑦 …... (I.70) Nilai exz dan eyz cara perolehannya sama dengan exy. Jadi regangan geser adalah setengah perubahan sudut dalam benda padat akibat deformasi.
Jika dihubungkan dengan komponen pergeseran u,v, w, maka komponen regangan seperti pada persamaan I.71 s.d. I.76 :
𝑒𝑥𝑥 = 𝛿𝑢𝛿𝑥 ... (I.71) 𝑒𝑦𝑦 = 𝛿𝑣𝛿𝑦 ... (I.72) 𝑒𝑧𝑧 =𝛿𝑤𝛿𝑧 ... (I.73)
33
𝑒𝑥𝑧 =12(𝛿𝑤𝛿𝑥 +𝛿𝑢𝛿𝑧) = 1/2𝛾𝑥𝑧 ... (I.75)
𝑒𝑦𝑧 = 12(𝛿𝑣𝛿𝑧+𝛿𝑤𝛿𝑦) = 1/2𝛾𝑦𝑧 ... (I.76) Dalam hal ini,
exx, eyy, ezz : regangan normal pada masing-masing elemen sumbu X, Y, dan Z exy, exz , eyz ` : regangan geser pada masing-masing bidang yang terbentuk dari
perpotongan sumbu XY, XZ, dan YZ
γxy, γxy, γxy : sudut regangan geser pada bidang yang terbentuk dari perpotongan sumbu XY, XZ, dan YZ
Perolehan nilai dan arah dari suatu regangan bisa dilakukan dengan analisis regangan.
1.8.9.2. Analisis regangan dalam ruang 3D. Analisis regangan merupakan salah satu jenis analisis geometrik dalam suatu analisis deformasi. Analisis regangan merupakan analisis geometrik yang menunjukkan perubahan posisi, bentuk, dan dimensi suatu materi, dengan menggunakan data pengamatan geodetik langsung dari regangan, atau menggunakan data regangan yang diperoleh dari perbedaan perataan data pengamatan geodetik perubahan posisi (Widjajanti, 1997). Suatu regangan dikatakan 3D jika terdiri atas enam komponen regangan (normal dan geser), yakni exx, eyy, ezz, exy, exz, dan eyz seperti disajikan pada Gambar 1.5 s.d. 1.7. Keenam
komponen regangan 3D tersebut bersama dengan tiga parameter rotasi (ωx, ωy, ωz)
dan tiga parameter translasi menghasilkan analisis deformasi dalam ruang 3D. Pendekatan terhadap analisis regangan dapat diklasifikasikan menjadi dua jenis dasar (Widjajanti, 1997), yaitu :
a. Pendekatan terhadap data pengamatan
Pendekatan ini berdasar pada perhitungan langsung komponen regangan dari perbedaan data pengamatan yang dilakukan berkala.
b. Pendekatan melalui pergeseran
Pendekatan ini berdasar pada perhitungan komponen regangan langsung dari perbedaan koordinat-koordinat pergeseran dari titik-titik geodetik yang diratakan.