Analisis dan Perancangan Program Arus
Kepadatan Jalan Dengan Dinamika Fluida
Berbasis Python
Setiadi Sidarta
Jalan Bumi Cirebon Adipura Lestari VIII no.1
[email protected]
ABSTRAK
Skripsi ini menganalisa kepadatan lalu lintas pada ruas jalan dan waktu tertentu dengan metode makroskopik. Metode ini meninjau arus lalu lintas sebagai suatu aliran fluida dengan kendaraan sebagai partikelnya. Melalui metode ini juga dapat dilihat hubungan antara kepadatan,
kecepatan, dan fluks lalu lintas. Pertama-tama, diasumsikan bahwa kecepatan dan kepadatan lalu lintas memiliki hubungan yang non linear, yang lebih dikenal dengan model LWR(Lighthill Witham Richards). Melalui model LWR, diperoleh persamaan diferensial parsial (PDP)
hiperbolik untuk kepadatan lalu lintas yang memiliki bentuk implisit. Secara analitik, model PDP ini diselesaikan dengan menggunakan metode karakteristik. Sedangkan secara numerik, model diselesaikan dengan menggunakan metode beda hingga yang diimplementasikan dalam suatu perangkat lunak. Melalui perangkat lunak tersebut, dilakukan simulasi untuk melihat dan menganalisa faktor-faktor yang dapat mempengaruhi kepadatan, kecepatan, dan fluks lalu lintas. Kata Kunci : transportasi, kepadatan, dinamika fluida, makroskopik
PENDAHULUAN
Transportasi merupakan sarana penting sebagai salah satu faktor pendukung berkembangnya suatu kota. Oleh karena itu kebutuhan akan jalur transportasi semakin bertambah. Namun perlu disadari bahwa keadaan ini menimbulkan permasalahan baru seputar arus kepadatan jalan. Sebagai contoh kota jakarta yang memiliki permasalahan lalu-lintas (kemacetan).
Permasalahan lalu lintas tersebut menjadi menarik untuk dibahas. Permasalahan tersebut sudah dibahas dari sisi ekonomi, kesehatan, dan sosial (Mahmud, Gope, & Rahman Chowdhury, 2012). Bahkan dari sisi ilmu pengetahuan dan teknologi juga sudah banyak yang membahas.
Penelitian tentang simulasi arus kepadatan jalan menggunakan metode
adaptive signal control telah berhasil diterapkan (Burghout & Wahlstedt, 2007).
Penelitian lain juga sudah berhasil menyusun prosedur kalibrasi untuk simulasi arus lalu-lintas secara mikroskopik (Chu, 2004). Dari sisi teknik sipil dan mesin membahas arus lalu lintas dengan pendekatan model logistik (Tian & Chiu, 2011).
Saat ini penelitian arus lalu lintas yang dilihat dari sisi makroskopik sedang banyak dibahas. Pada dasarnya, tinjauan secara makroskopis melihat lalu-lintas secara global. Beberapa diantaranya ditinjau melalui pendekatan
soliton (Saavedra & Velasco, 2009), pendekatan secara stokastik (Orosz,
Krauskopf, & Wilson, 2006).
Dengan latar belakang yang telah diuraikan diatas, maka penulis tertarik untuk membahas permasalahan lalu-lintas secara makroskopis melalui pendekatan dinamika fluida. Penerapan dinamika fluida pada arus kepadatan
jalan bisa dianalogikan sebagai sebuah partikel pada sebuah aliran fluida, dimana masing-masing partikel dianggap serupa dan ditinjau secara global.
Penerapan dinamika fluida tersebut akan dimodelkan secara matematis dan dicari solusi analitiknya. Dengan model matematika tersebut akan diperoleh data tentang arus kepadatan jalan, seperti kecepatan rata-rata partikel, volume kendaraan dalam satuan waktu, dan juga kepadatan kendaraan di sebuah ruas jalan. Hasil tersebut bisa digunakan untuk mempelajari keterkaitan sifat permasalahan yang sedang diselidiki dengan data-data yang diperoleh, juga untuk menganalisis dan memprediksi keadaan lalu-lintas.
Analisis dan prediksi dari pemodelan tersebut diperlukan untuk menganalisis situasi kepadatan jalan jika terjadi kecelakaan, memperkirakan situasi arus kepadatan jalan yang berkaitan dengan jalur yang terhubung. Selain itu melihat kecenderungan pengemudi dalam suatu situasi arus kepadatan jalan dan juga memungkinkan juga untuk membandingkan hasil dari beberapa kodsisi dan situasi jalan.
Kemudian akan disimulasikan dengan metode numerik. Simulasi numerik tersebut akan disusun dengan menggunakan piranti lunak Phyton dan
Qt Designer. Kedua hasil tersebut kemudian akan dibandingkan untuk dianalisis
lebih lanjut.
Dengan demikian, penulis memilih judul “Analisis Arus Kepadatan Jalan dengan Dinamika Fluida Berbasis Bahasa Phyton”. Penulis berharap skripsi ini dapat membantu memberi gambaran tengang pemodelan matematika untuk arus kepadatan jalan dengan dinamika fluida ditinjau dari sisi macroscopic.
METODE PENELITIAN
Metode yang digunakan untuk penelitian ini adalah sebagai berikut :
1. Pemodelan
Tahap inibertujuan untuk mendapatkan informasi serta model matematika yang diperlukan untuk mencapai tujuan. Metode ini terdiri dari beberapa tahapan yaitu :
a. Identifikasi masalah serta syarat-syarat
Melakukan identifikasi awal untuk menentukan syarat batas dan syarat awal yang akan digunakan untuk membuat pemodelan matematika mengenai kepadatan lalu lintas.
b. Studi kepustakaan
Penulis mencari referensi dari jurnal-jurnal, buku, artikel, serta sumber lain yang bisa membantu penelitian skripsi ini. Penulis kemudian mempelajari dan
memahami materi tersebut untuk menunjang penulisan skripsi ini. c. Sumber Data
Data yang digunakan pada skripsi ini adalah data sekunder yang diperoleh dari studi literature.
d. Formulasi
Pada tahap ini kondisi awal, syarat-syarat kondisi, serta faktor-faktor pembatas dibuat dalam bentuk formulasi baku. Dengan menggunakan bentuk awal yang sudah diketahui, maka solusi analitik bisa dicari dengan menurunkan semua informasi yang sudah diketahui.
e. Pemodelan Matematika
Setelah formulasi dilakukan, maka tahap selanjutnya yang dilakukan adalah membuat model matematika dari keadaan lalu lintas. Model ini nantinya diharapkan dapat merepresentasikan keadaan lalu lintas walaupun dengan asumsi-asumsi tertentu untuk membatasi permasalahan agar tidak terlalu luas. f. Analisis Matematika
Dari model matematika yang dihasilkan, maka kita dapat melakukan analisa lebih jauh untuk bias mengambil kesimpulan. Analisa ini perlu dilakukan agar solusi yang diperoleh di bagian ahir benar-benar merepresentasikan keadaan lalu lintas.
g. Solusi Matematika
Tahap terakhir setelah analisis dilakukan adalah mengambil kesimpulan serta solusi untuk model dan formula yang sudah ada.
2. Metode perancangan
Tahapan perancangan dalam penulisan ini dibagi menjadi dua tahap, yaitu perancangan aplikasi untuk menghasilkan grafik permukaan dari solusi matematika yang dihasilkan dan Perancangan disain antarmuka.
HASIL DAN BAHASAN
a. Kasus I
Pada kasus yang pertama ini, akan diambil suatu nilai awal yang berupa fungsi yaitu
Pemilihan nilai awal kepadatan yang berupa fungsi ini bertujuan agar kita bisa mendapatkan solusi analitik dari (4.13) secara eksplisit.
Pertama-tama, substitusikan persamaan (4.22) ke dalam (4.13) sehingga diperoleh − − = x V t t x 2 max 2 max 3 1 2 1 ) , ( ρ ρ ρ (4.23)
Melalui manipulasi aljabar maka diperoleh persamaan kuadrat dalam fungsi
ρ
( t
x
,
)
yaitu 0 ) ( 2 3 max max2 2 max 2 maxtρ − ρ ρ+ x−V t ρ = V (4.24)sehingga solusi dari (4.23) adalah
t V t V x t V t x max 2 max max max 4 max 2 max 3 ) ( 3 ) , (
ρ
ρ
ρ
ρ
= ± − −Perhatikan bahwa nilai
ρ
max2 +ρ
max4 −3Vmaxt(x−Vmaxt)ρ
max2 akan melebihi nilai ρmax sehingga kita pilih bahwa solusi analitik dari persamaan (4.4)dengan kepadatan awal (4.22) adalah
t V t V x t V t x max 2 max max max 4 max 2 max 3 ) ( 3 ) , (
ρ
ρ
ρ
ρ
= − − − b. Kasus IIMisalkan kita mengamati suatu ruas jalan yang panjangnya 10 km selama 6 menit. Asumsikan kepadatan jalan (banyaknya kendaraan) pada jarak 0 km, ρ(0,t) adalah tetap yaitu sebesar 21/km, kepadatan jalan maksimum ρmax = 250/km dan
kecepatan arus jalan maximum Vmax = 60 km/jam.
Pada kasus kedua ini, kepadatan awal jalan ρ(x,0) tidak diberikan berupa fungsi seperti pada kasus 1. Kepadatan awal jalan diberikan dalam bentuk grafik yang ditunjukkan oleh Gambar 4.2.
Gambar 4.1 Kepadatan jalan awal, ρ(x,0)
Perhatikan Gambar 4.2, gambar tersebut menunjukkan bahwa kepadatan awal tidak dapat dinyatakan ke dalam suatu fungsi yang sederhana. Dengan demikian, kita tidak dapat mencari solusi analitiknya secara eksplisit, sehingga pada kasus ini hanya akan dilihat solusi numeriknya saja.
Ingat bahwa hubungan antara kecepatan dan kepadatan arus lalu lintas yang kita miliki adalah non linear yang diberikan oleh persamaan berikut
(4.25) Berdasarkan hubungan (4.25) tersebut, dapat kita lihat bahwa kecepatan lalu lintas akan nol ketika kepadatan lalu lintas sama dengan kepadatan maximum yang dapat dicapai oleh ruas jalan.
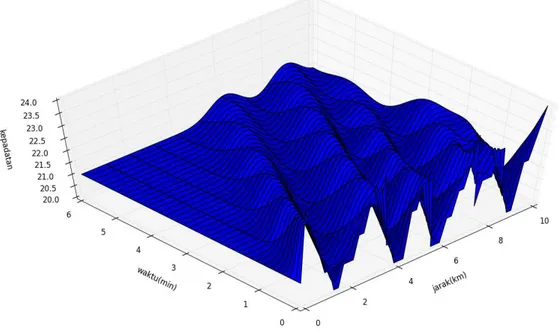
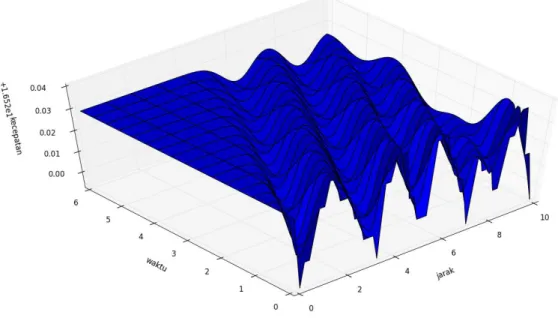
Lebih jauh lagi, perhatikan gambar 4.3 dan gambar 4.4. Nilai kecepatan lalu lintas tidak pernah mencapai nol, karena kepadatan lalu lintas tidak pernah mencapai nilai kepadatan maksimum yang dapat ditampung oleh jalan tersebut. Lebih rinci lagi, kepadatan terbesar yang dicapai adalah
24/km (yaitu saat t = 0), sedangkan kepadatan maksimum jalan adalah ρmax = 250/km, sehingga kecepatan lalu lintas tidak pernah nol.
Berdasarkan gambar 4.3 dan gambar 4.4 kita juga dapat melihat bahwa seiring dengan bertambahnya waktu dan jarak, maka nilai kepadatan dan kecepatan lalu lintas semakin tidak fluktuatif atau dengan kata lain semakin homogen. Hal ini jelas masuk akal, mengingat bahwa kepadatan lalu lintas bisaanya akan terurai dengan sendirinya walaupun dalam waktu yang sangat lama. Kepadatan awal juga memberikan pengaruh yang besar terhadap perubahan kepadatan dan kecepatan lalu lintas di setiap titik.
Gambar 4.3 Profil Kecepatan lalu lintas, v(x,t)
Selain itu, dari hubungan (4.25) juga diperoleh bahwa semakin besar nilai kepadatan lalu lintas ρ, maka kecepatan arus lalu lintas V semakin kecil. Hal ini terlihat juga pada gambar 4.3 dan gambar 4.4. Saat kepadatan lalu lintas ρ konstan, maka kecepatan lalu lintas juga konstan. Keadaan ini sudah sesuai dengan grafik fundamental dari kepadatan lalu lintas yang diberikan pada gambar 4.1.
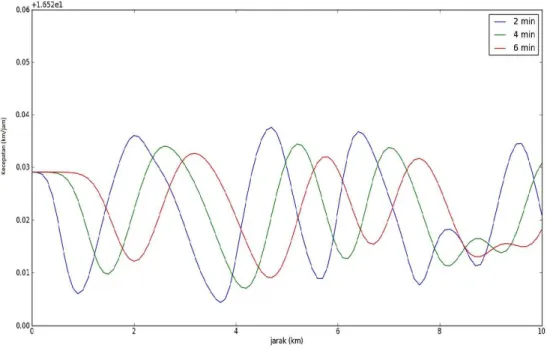
Lebih detail lagi, gambar 4.5 dan gambar 4.6 secara berturut-turut menggambarkan profil kepadatan dan kecepatan lalu lintas pada saat 2 menit, 4 menit, dan 6 menit. Perhatikan bahwa pada saat t = 2 menit, kepadatan dan kecepatan arus lalu lintas mulai terlihat berbeda ketika x > 0.25 km. Saat t = 4 menit, kepadatan dan kecepatan arus lalu lintas mulai terlihat berbeda ketika x > 0.5 km. Saat t = 6 menit, kepadatan dan kecepatan arus lalu lintas mulai terlihat berbeda ketika x > 1 km. Dengan demikian,
seiring dengan bertambahnya waktu, maka semakin jauh dari titik asal kita akan merasakan perubahan kepadatan dan kecepatan lalu lintas.
Gambar 4.4 Profil Kepadatan lalu lintas pada beberapa waktu yang berbeda
Gambar 4.5 Profil kecepatan lalu lintas pada beberapa waktu yang berbeda
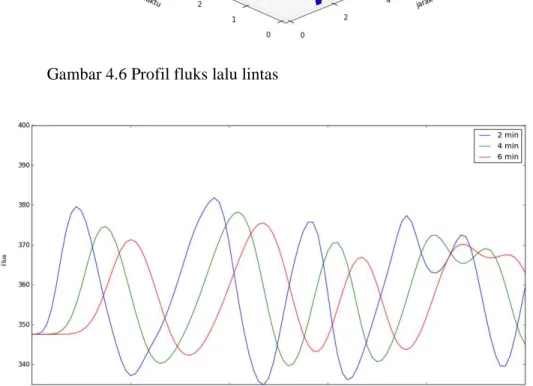
Gambar 4.6 Profil fluks lalu lintas
Gambar 4.7 Profil fluks lalu lintas pada beberapa waktu yang berbeda
Sudut pandang yang berbeda (Fluks dan Kepadatan) menghasilkan permukaan yang berbeda pula. Hal ini disebabkan karena kepadatan melihat jumlah kendaraan yang ada pada suatu ruas jalan. Sedangkan fluks adalah banyaknya kendaraan yang lewat selama waktu tertentu.
REFERENSI
Burghout, W., & Wahlstedt, J. (2007). Hybrid Traffic Simulation with Adaptive Signal Control.
Chu, L. (2004). A Calibration Procedure for Microscopic Traffic Simulation.
M. H. KABIR, M. O. GANI, & L. S. ANDALLAH. (2010). NUMERICAL SIMULATION OF A MATHEMATICAL TRAFFIC FLOW.
Mahmud, K., Gope, K., & Rahman Chowdhury, S. M. (2012). Possible Causes & Solutions of Traffic Jam and Their Impact on the Economy of Dhaka City.
Journal of Management and Sustainability.
Orosz, G., Krauskopf, B., & Wilson, R. (2006). TRAFFIC JAM DYNAMICS IN A CAR-FOLLOWING MODEL WITH REACTION-TIME DELAY AND STOCHASTICITY OF DRIVERS.
Saavedra, P., & Velasco, R. M. (2009). Solitons in a macroscopic traffic model.
Tian, Y., & Chiu, Y.-C. (2011). ANISOTROPIC MESOSCOPIC TRAFFIC SIMULATION APPROACH TO SUPPORT LARGE SCALE TRAFFIC AND LOGISTIC MODELING AND ANALYSIS.
Bennett, S., McRobb, S., & Farmer, R. (2006). Object-Oriented Systems Analysis And
Design Using UML. Maidenhead: McGraw-Hill.
Burghout, W. (2005). Mesoscopic Simulation Models for Short-Term Prediction.
Daganzo, C. (1994-1995). The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory. Transportation
Research, B 28B(4).
Elloumi, N., & H. Haj-Salem. (1994). METACOR: A macroscopic Modelling Tool for Urban Corridor. TRIennal Symposium on Transport Analysis.
Immers, P. L., & Logghe, S. (2002). Traffic Flow Theory.
Kachroo, P., Al-nasur, S.J., & Wadoo, S.A., Shende. (2008). Pedestrian Dynamics. Mulawarman. (2011). Memahami Penggunaan UML (Unified Modelling Language).
Jurnal Informatika Mulawarman, 1.
Payne, H. J. (1971). Models of freeway traffic and control. Simulation Council 1, 51-61. Pressman , R. S. (2011). Software Engineering: a practitioner's approach.
Satzinger, J. W., Jackson, R. B., & Burd, D. S. (2005). Object-Oriented Analysis &
Design with the Unified Process. Boston: Cengange Learning.
Shneiderman, B. (2010). Designing The User Interface Fifth Edition.
Whitten, J. L., & Bentley, L. D. (2004). Systems Analysis & Design Methods (7th ed.). New York: McGraw-Hill.
RIWAYAT PENULIS
Setiadi Sidarta lahir di kota Cirebon namun tecatat secara sipil di Jakarta pada 15 Agustus 1989 . Penulis menamatkan pendidikan S1 di Universitas Bina Nusantara dalam bidang ilmu Teknik Informatika dan Matematika pada tahun 2013, aktif dalam bidang organisasi BNCC serta beberapa event yang diadakan di Jakarta.