BAB 2
LANDASAN TEORI
2.1 Perencanaan Produksi
2.1.1 Arti dan Pentingnya Perencanaan Produksi
Perencanaan produksi merupakan penentuan arah awal dari tindakan yang harus
dilakukan di masa yang akan datang, apa yang harus dilakukan, berapa banyak
dan kapan harus melakukannya. Hasil perencanaan produksi adalah sebuah
rencana produksi. Tanpa adanya rencana produksi yang baik, maka tujuan tidak
akan dapat dicapai dengan efektif dan efisien.
Tujuan perusahaan pada umumnya adalah untuk memperoleh laba setinggi
mungkin. Jumlah produksi merupakan banyaknya hasil produksi yang seharusnya
diproduksikan oleh suatu perusahaan dalam satu periode (Sukanto & Indriyo,
1999). Oleh karena itu maka jumlah produksi harus direncanakan agar perusahaan
dapat memperoleh laba maksimal. Di samping itu jumlah produksi perlu
direncanakan dan diperhitungkan dengan cermat karena tanpa perencanaan dapat
berakibat bahwa jumlah yang diproduksikan menjadi terlalu besar atau terlalu
kecil.
Jumlah produksi yang terlalu besar berakibat biaya yang terlalu besar. Di
samping itu dengan adanya jumlah produksi yang berlebihan dapat berakibat
merosotnya harga jual.
Jumlah produksi yang terlalu kecil atau terlalu sedikit berakibat tidak
dapatnya perusahaan tersebut memenuhi permintaan pasar. Akibatnya para
pelanggan yang tidak terpenuhi permintaanya akhirnya pindah dan menjadi
ini berarti hilangnya sebagian dari pasar potensial perusahaan. Di samping itu
terlalu kecilnya jumlah produk yang diproduksi dapat berakibat menanggung
harga pokok yang terlalu tinggi disebabkan karena biaya tetap hanya dipikul oleh
jumlah produksi yang kecil saja sehingga biaya tetap per satuannya menjadi
tinggi. Harga pokok yang tinggi berarti perusahaan terpaksa menentukan harga
jual yang tinggi pula. Hal ini dapat menyebabkan permintaan berkurang.
2.2 Peramalan
2.2.1 Pengertian dan Konsep Dasar Peramalan
Peramalan adalah proses untuk memperkirakan beberapa kebutuhan di masa
datang yang meliputi kebutuhan dalam ukuran kuantitas, kualitas, waktu dan
lokasi yang dibutuhkan dalam rangka memenuhi permintaan barang ataupun jasa.
Peramalan tidak terlalu dibutuhkan dalam kondisi permintaan pasar yang stabil,
karena perubahan permintaannya relatif kecil. Tetapi peramalan akan sangat
dibutuhkan bila kondisi permintaan pasar bersifat kompleks dan dinamis (Arman
& Yudha, 2008).
Dalam kondisi pasar bebas, permintaan pasar lebih banyak bersifat
kompleks dan dinamis karena permintaan tersebut akan tergantung pada keadaan
sosial, ekonomi, sosial politik, aspek teknologi, produk pesaing dan produk
substitusi. Oleh karena itu peramalan yang akurat merupakan informasi yang
sangat dibutuhkan dalam pengambilan keputusan manajemen.
2.2.2 Sifat Hasil Peramalan
Dalam membuat peramalan atau menerapkan hasil suatu peramalan, maka ada
beberapa hal yang harus dipertimbangkan, yaitu:
1. Peramalan pasti mengandung kesalahan, artinya peramal hanya bisa
mengurangi ketidakpastian yang akan terjadi, tetapi tidak dapat
2. Peramalan seharusnya memberikan informasi tentang berapa ukuran
kesalahan, artinya karena peramalan pasti mengandung kesalahan, maka
adalah penting bagi peramal untuk menginformasikan seberapa besar
kesalahan yang mungkin terjadi.
3. Peramalan jangka pendek lebih akurat dibandingkan peramalan jangka
panjang. Hal ini disebabkan karena pada peramalan jangka pendek, faktor-
faktor yang mempengaruhi permintaan relatif masih konstan, sedangkan
semakin panjang periode peramalan, maka semakin besar pula kemungkinan
terjadinya perubahan faktor-faktor yang mempengaruhi permintaan.
2.2.3 Metode Peramalan
Berdasarkan sifat ramalan, maka peramalan dapat dibedakan atas dua jenis, yaitu
peramalan kualitatif dan kuantitatif (Makridakis, dkk, 1992).
1. Peramalan kualitatif adalah peramalan yang didasarkan atas kualitatif pada
masa lalu. Hasil peramalan yang dibuat sangat bergantung pada orang yang
menyusunnya. Hal ini penting karena hasil peramalan tersebut ditentukan
berdasarkan pemikiran yang bersifat intuisi, judgement atau pendapat, dan
pengetahuan serta pengalaman dari penyusunnya. Biasanya peramalan secara
kualitatif ini didasarkan atas hasil penyelidikan, seperti Delphi, S-curve,
analogi dan penelitian bentuk atau morphological research atau didasarkan
atas ciri-ciri normatif seperti decision matrices atau decision trees.
2. Peramalan kuantitatif adalah peramalan yang didasarkan atas data kuantitatif
pada masa lalu. Hasil peramalan yang dibuat sangat tergantung pada metode
yang dipergunakan dalam peramalan tersebut. Dengan metode yang berbeda
akan diperoleh hasil peramalan yang berbeda, adapun yang perlu diperhatikan
dari penggunaan metode tersebut, adalah baik tidaknya metode yang
dipergunakan, sangat ditentukan oleh perbedaan atau penyimpangan antara
hasil ramalan dengan kenyataan yang terjadi. Metode yang baik adalah
mungkin. Peramalan kuantitatif hanya dapat digunakan apabila terdapat tiga
kondisi sebagai berikut:
1. Adanya informasi tentang keadaan yang lain.
2. Informasi tersebut dapat dikuantifikasikan dalam bentuk data.
3. Dapat diasumsikan bahwa pola yang lalu akan berkelanjutan pada masa yang
akan datang.
Peramalan kuantitatif terbagi atas dua jenis yaitu metode time series
(deret waktu) dan metode kausal (sebab akibat).
a. Metode time series adalah metode yang dipergunakan untuk menganalisis
serangkaian data yang merupakan fungsi dari waktu. Metode ini
mengasumsikan beberapa pola atau kombinasi pola selalu berulang sepanjang
waktu, dan pola dasarnya dapat diidentifikasi semata-mata atas dasar data
historis dari serial itu.
Dengan analisis deret waktu dapat ditunjukkan bagaimana permintaan
terhadap suatu produk tertentu bervariasi terhadap waktu. Sifat dari perubahan
permintaan dari tahun ke tahun dirumuskan untuk meramalkan penjualan pada
masa yang akan datang.
Ada empat pola data yang bisa didefinisikan dalam metode time series
(deret waktu), antara lain:
1. Pola Horizontal (H)
Pola data ini terjadi apabila nilai data berfluktuasi di sekitar nilai rata-rata yang
konstan. (Deret seperti itu adalah deret yang konstan terhadap nilai rata-ratanya).
Suatu produk yang penjualannya tidak meningkat atau menurun selama waktu
tertentu termasuk dalam pola data horizontal.
2. Pola Musiman (Seasonal)
Pola ini terjadi bilamana suatu deret dipengaruhi oleh faktor-faktor musiman
Penjualan dari produk minuman ringan, es krim, dan lain-lain menunjukkan jenis
pola ini.
3. Pola Siklis (Cycle)
Terjadi bilamana datanya dipengaruhi oleh fluktuasi ekonomi jangka panjang
seperti yang berhubungan dengan siklus bisnis.
4. Pola Trend
Pola data ini terjadi bila data memiliki kecenderungan untuk naik atau turun terus
menerus dalam jangka panjang.
b. Metode Kausal
Metode ini mengasumsikan faktor yang diperkirakan menunjukkan adanya
hubungan sebab akibat dengan satu atau beberapa variabel bebas. Misalnya,
jumlah pendapatan berhubungan dengan faktor-faktor seperti jumlah
penjualan, harga jual, dan tingkat promosi. Kegunaan dari metode kausal
adalah untuk menemukan bentuk hubungan antara variabel tersebut dan
menggunakannya untuk meramalkan nilai dari variabel tidak bebas.
2.2.4 Metode Penghalusan (Smoothing)Data Time Series (Deret Waktu)
Metode smoothing digunakan untuk mengurangi ketidakteraturan musiman dari
data yang lalu, dengan membuat rata-rata tertimbang dari sederetan data masa
lalu. Ketepatan peramalan dengan metode ini akan terdapat pada peramalan
jangka pendek, sedangkan untuk peramalan jangka panjang kurang akurat.
1. Metode Pemulusan Eksponensial Tunggal (Single Exponential Smoothing)
Metode pemulusan eksponensial tunggal (single exponential smoothing)
menambahkan parameter dalam modelnya untuk mengurangi faktor
kerandoman. Nilai peramalan dapat dicari dengan menggunakan rumus sebagai
1
di mana:
= data permintaan pada periode
= faktor/konstanta pemulusan
= peramalan untuk periode
Metode pemulusan eksponensial tunggal mengikutsertakan data dari
semua periode. Setiap data pengamatan mempunyai kontribusi dalam penentuan
nilai peramalan periode sesudahnya. Namun, dalam perhitungannya cukup
diwakili oleh data pengamatan dan hasil peramalan periode terakhir, karena nilai
peramalan periode sebelumnya sudah mengandung nilai-nilai pengamatan
sebelumnya.
Istilah eksponensial dalam metode ini berasal dari pembobotan (faktor
pemulusan) dari periode sebelumnya yang berbentuk eksponensial, sebagaimana
dijabarkan berikut ini:
1
1 1
1 1
… 1
Terlihat bahwa koefisien dari waktu ke waktu membentuk hubungan
eksponensial. Misalnya, untuk 0,2 maka koefisien dari , , ,
, … , adalah 0,2; 0,2 0,8 ; 0,2 0,8 ; 0,2 0,8 ; … ; 0,2 0,8
2. Metode Pemulusan Eksponensial Linier (Linear Exponential Smoothing/ Double Exponential Smoothing)
Metode pemulusan eksponensial tunggal hanya akan efektif apabila serial data
yang diamati memiliki pola horizontal (stasioner). Jika metode itu digunakan
untuk serial data yang memiliki unsur trend (kecenderungan) yang konsisten,
nilai-nilai peramalannya akan selalu berada di belakang nilai aktualnya (terjadi
serial data yang meiliki unsur trend adalah metode pemulusan eksponensial linier.
Salah satu metode yang digunakan adalah metode pemulusan eksponensial linier
dari Holt, yang menggunakan persamaan sebagai berikut:
1
1
Pemulusan eksponensial linier dari Holt menambahkan persamaan
untuk memperoleh pemulusan trend dan menggabungkan trend dengan
persamaan pemulusan standar sehingga menghasilkan persamaan . Metode dari
Holt ini menggunakan dua parameter, dan , yang masing-masing nilainya
dapat dipilih dari setiap angka antara 0 sampai dengan 1. Kedua parameter itu
dapat mempunyai nilai yang sama atau berbeda besarnya.
Proses inisialisasi untuk pemulusan eksponensial linier dari Holt
memerlukan dua taksiran, yaitu untuk nilai dan . Nilai dapat disamakan
dengan nilai aktual (pengamatan) atau rata-rata dari beberapa nilai pengamatan
pada periode awal, sedangkan nilai menggunakan taksiran kemiringan dari
serial data tersebut atau menggunakan rata-rata kenaikan dari beberapa periode,
misalnya:
3
3. Metode Pemulusan Eksponensial Musiman (Winter’s Three Parameter Trend and Seasonality Method)
Sebagaimana halnya dengan persamaan pemulusan eksponensial linier yang dapat
digunakan untuk meramalkan serial data yang memiliki pola trend, bentuk
persamaan yang lebih tinggi dapat digunakan jika pola dasar serial datanya
musiman. Salah satu metode peramalan yang khusus untuk data yang berpola
Metode ini didasarkan atas tiga persamaan, yaitu unsur stasioner, trend dan
musiman, yang dirumuskan sebagai berikut:
1
1 1
di mana:
= nilai pemulusan standar pada periode ke-
= nilai pemulusan trend pada periode ke-
= jumlah periode dalam satu siklus musim
= faktor penyesuaian musiman (indeks musiman)
= peramalan untuk periode ke depan
Sebagaimana dalam perhitungan pemulusan eksponensial tunggal, nilai
inisial dapat disamakan dengan nilai aktualnya atau berupa rata-rata dari
beberapa nilai pada musim yang sama, sedangkan nilai inisal dicari dengan
menggunakan rumus sebagai berikut:
1
⋯
(Setiap suku ini merupakan taksiran trend selama
satu musim lengkap, dan taksiran awal dari
ditetapkan sebagai rata-rata dari suku seperti itu).
2.2.5 Ukuran Akurasi Hasil Peramalan
Bila adalah data yang sebenarnya pada periode dan adalah hasil peramalan
pada periode yang sama maka penyimpangan yang terjadi dapat didefinisikan
sebagai berikut:
sehingga bila terdapat periode pengamatan, maka akan terdapat sejumlah
penyimpangan. Beberapa rumus yang dapat digunakan untuk mengukur ketelitian
peramalan adalah sebagai berikut:
1. Mean Error (ME) ∑
2. Mean Absolute Error (MAE) ∑ | |
3. Sum of Squared Errors (SSE) ∑
4. Mean Squared Error (MSE) ∑
5. Standard Deviation Errors (SDE) ∑
6. Percentage Error (PE) 100
7. Mean Persentage Error (MPE) ∑
8. Mean Absolute Persentage Error (MAPE ) ∑ | |
2.3 Program Linier
2.3.1 Pengertian Umum Program Linier
Program linier adalah suatu cara untuk menyelesaikan persoalan pengalokasian
sumber-sumber yang terbatas di antara beberapa aktivitas yang bersaing, dengan
cara terbaik yang mungkin dilakukan.
Pokok pikiran utama dalam menggunakan program linier adalah
merumuskan masalah dengan jelas dengan menggunakan sejumlah informasi yang
tersedia. Sesudah masalah terumuskan dengan baik, maka langkah berikut ialah
menerjemahkan masalah ke dalam bentuk model matematika (P. Siagian, 1987).
Program linier berkaitan dengan maksimalisasi atau minimalisasi dari
fungsi tujuan linier dengan beberapa variabel yang memiliki kesamaan dan
Program linier menggunakan model matematis untuk menjelaskan
persoalan yang dihadapinya. Sifat “linier” memberi arti bahwa seluruh fungsi
matematis dalam model merupakan fungsi yang linier, demikian kata “program”
merupakan sinonim untuk perencanaan. Dengan demikian program linier adalah
perencanaan aktivitas-aktivitas untuk memperoleh suatu hasil yang optimum,
yaitu suatu hasil yang mencapai tujuan terbaik di antara alternatif yang fisibel.
Formulasi model matematis dari persoalan pengalokasian sumber-sumber
pada permasalahan program linier adalah sebagai berikut:
Maksimum/Minimum ⋯
Kendala: ⋯
⋯
. . . .
. . . .
. . . .
⋯
dan , , … , 0
Model program linier diaplikasikan untuk menyelesaikan berbagai
masalah di antaranya adalah sebagai berikut:
a. Masalah kombinasi produk, yaitu menentukan berapa jumlah dan jenis produk
yang harus dibuat agar diperoleh keuntungan maksimum atau biaya minimum
dengan memperhatikan sumber daya yang dimiliki.
b. Masalah perencanaan investasi, yaitu berapa banyak dana yang akan
ditanamkan dalam setiap alternatif investasi, agar memaksimumkan return in
investmen atau net present value dengan memperhatikan sumber daya yang
c. Masalah perencanaan produksi dan persediaan, yaitu menentukan berapa
banyak produk yang akan diproduksi setiap periode, agar meminimumkan
biaya persediaan, sewa, lembur, dan biaya sub kontrak.
d. Masalah perencanaan promosi, yaitu berapa banyak dana yang akan
dikeluarkan untuk kegiatan promosi agar diperoleh efektivitas penggunaan
media promosi.
2.3.2 Persyaratan Penyelesaian
Parlin (1997) mengemukakan bahwa syarat-syarat yang harus dipenuhi dalam
merumuskan suatu problema keputusan ke dalam model matematik program linier
adalah sebagai berikut:
1. Memiliki kriteria tujuan.
2. Sumber daya yang tersedia sifatnya terbatas.
3. Semua variabel dalam model memiliki hubungan matematis yang bersifat
linier.
4. Koefisien model diketahui dengan pasti.
5. Bilangan yang digunakan dapat bernilai bulat atau pecahan.
6. Semua variabel keputusan harus bernilai nonnegatif.
Untuk membuat formulasi model program linier, terdapat tiga langkah utama
yang harus dilakukan, yaitu:
1. Tentukan variabel keputusan atau variabel yang ingin diketahui dan
gambarkan dalam simbol matematik.
2. Tentukan tujuan dan gambarkan dalam satu sel fungsi linier dari variabel
keputusan yang dapat berbentuk maksimum atau minimum.
3. Tentukan kendala dan gambarkan dalam bentuk persamaan linier atau
2.3.3 Metode Simpleks
Metode simpleks dikembangkan pertama kali oleh George Dantzig tahun 1947.
Metode ini menyelesaikan masalah program linier melalui tahapan (perhitungan
ulang) dimana langkah-langkah perhitungan yang sama diulang sampai tercapai
solusi optimal (Zainal & Ali, 1997).
Ide metode simpleks adalah untuk melanjutkan dari satu solusi yang layak
(yang merupakan salah satu titik ekstrim) dari suatu set kendala dalam bentuk
standart, sedemikian rupa untuk terus menurunkan nilai dari fungsi tujuan sampai
nilai minimum tercapai (Luenberger, 1984).
Penyelesaian model program linier dengan metode simpleks diperlukan
konversi model formulasi program linier ke dalam bentuk standar dengan
syarat-syarat sebagai berikut:
1. Semua kendala berbentuk persamaan, jika menghadapi kendala berbentuk
lebih kecil sama dengan, dapat diubah ke dalam bentuk persamaan dengan
cara menambahkan slack variable yang bernilai satu. Jika menghadapi
kendala berbentuk lebih besar sama dengan, dapat diubah ke dalam bentuk
persamaan dengan cara mengurangkan dengan surplus variabel yang bernilai
minus satu.
2. Nilai ruas kanan setiap kendala bertanda positif, jika menghadapi kendala
yang memiliki nilai ruas kanan bertanda negatif, maka harus diubah menjadi
positif dengan cara mengalikannya dengan minus satu.
3. Semua nilai variabel keputusan nonnegatif (artinya bernilai positif atau nol).
2.3.4 Algoritma Simpleks untuk Persoalan Maksimasi
1. Konversikan formulasi model program linier ke dalam bentuk standar.
3. Jika seluruh variabel nonbasis (NBV) mempunyai koefisien nonnegatif
(artinya berharga positif atau nol) pada baris fungsi tujuan [baris persamaan
yang biasa disebut baris 0 atau baris ], maka BFS sudah optimal. Jika
pada baris 0 masih ada variabel dengan koefisien negatif, pilihlah salah satu
variabel yang mempunyai paling negatif pada baris 0 itu. Variabel ini akan
memasuki status variabel basis, karena itu variabel ini disebut sebagai variabel
yang masuk basis (entering variable, disingkat EV).
4. Hitung rasio dari ruas kanan atau (koefisien EV) pada setiap baris di mana EV
mempunyai koefisien positif. Variabel basis pada baris pembatas dengan rasio
positif terkecil akan berubah status menjadi variabel nonbasis. Variabel ini
kemudian disebut sebagai variabel yang meninggalkan basis (leaving
variable, disingkat LV).
5. Lakukan operasi baris elementer (ERO) untuk membuat koefisien EV pada
baris dengan rasio positif terkecil ini menjadi bernilai 1 dan bernilai 0 pada
baris-baris lainnya.
6. Kembali ke langkah 3.
2.3.5 Algoritma Simpleks untuk Persoalan Minimasi
1. Konversikan formulasi model program linier ke dalam bentuk standar.
2. Cari Solusi Basis Feasible (BFS).
3. Jika seluruh variabel nonbasis (NBV) mempunyai koefisien negatif (artinya
bernilai lebih kecil atau sama dengan nol) pada baris fungsi tujuan [baris
persamaan yang biasa disebut baris 0 atau baris ], maka BFS sudah
optimal. Jika pada baris 0 masih ada variable dengan koefisien nonnegatif,
pilihlah salah satu variabel yang mempunyai paling positif pada baris 0 itu.
Variabel ini akan memasuki status variabel basis, karena itu variabel ini
disebut sebagai variabel yang masuk basis (entering variable, disingkat EV). 4. Hitung rasio dari ruas kanan atau (koefisien EV) pada setiap baris di mana EV
mempunyai koefisien positif. Variabel basis pada baris pembatas dengan rasio
kemudian disebut sebagai variabel yang meninggalkan basis (leaving
variable, disingkat LV).
5. Lakukan operasi baris elementer (ERO) untuk membuat koefisien EV pada
baris dengan rasio positif terkecil ini menjadi bernilai 1 dan bernilai 0 pada
baris-baris lainnya.
6. Kembali ke langkah 3.
2.4 Metode Goal Programming
2.4.1 Pengertian dan Konsep Dasar Goal Programming
Goal Programming adalah bentuk khusus atau modifikasi dari Linear
Programming. Jika dalam pemrograman linier tujuannya adalah memaksimasi
atau meminimasi, maka Goal Programming tujuannya adalah meminimumkan
deviasi-deviasi dari tujuan-tujuan tertentu. Ini berarti bahwa semua masalah Goal
Programming adalah masalah minimasi. Karena deviasi-deviasi dari tujuan-tujuan
diminimumkan.
Goal Programming merupakan teknik optimasi dari beberapa tujuan yang
dikembangkan dari pemrograman linier dalam riset operasi. Goal Programming
pertama sekali diperkenalkan dalam sebuah aplikasi dari single-objective linear
programming oleh Charnes dan Cooper (1961).
Inti dari Goal Programming adalah pengenalan aspirasi level atau nilai
target , 1, … , dengan syarat bahwa jika mungkin solusi harus mencapai
nilai target (Eiselt & Sandblom, 2007).
Kalyanmoy (2008), ide utama dalam Goal Programming adalah untuk
menemukan solusi yang mencapai target tujuan dari satu atau lebih fungsi
objektif. Jika tidak ada solusi yang mencapai target yang telah ditentukan di
semua fungsi objektif, tugasnya adalah untuk mencari solusi yang
(Eiselt & Sandblom, 2007) bentuk umum dari metode Goal Programming adalah:
Minimum
Kendala:
di mana: 1, 2, … ,
1, 2, … ,
1, 2, … ,
, , 0
= deviasi (penyimpangan) positif
= deviasi (penyimpangan) negatif
= koefisien fungsi kendala tujuan
= variabel pengambilan keputusan
= tujuan atau target yang ingin dicapai
= koefisien fungsi kendala sistem
= sumber daya yang tersedia
2.4.2 Istilah-istilah dalam Goal Programming
a. Variabel Deviasi
Definisi: Andaikan adalah variabel sembarang, maka dapat dinyatakan
sebagai
, 0
0, 0
0, 0
, 0
di mana: = komponen positif dari
Dari dalil | | = +
Bukti:
Dari sifat harga mutlak | | , 0
, 0
Dari definisi:
, 0
0, 0
0, 0
, 0
atau
, 0
, 0
Jadi, | |= + (terbukti)
Variabel deviasi sesuai fungsinya yaitu menampung deviasi terhadap
tujuan-tujuan yang dikehendaki yang dibedakan atas dua, yaitu:
1. Variabel Deviasi Negatif
Variabel deviasi negatif berfungsi untuk menampung deviasi yang berbeda di
bawah tujuan yang dikehendaki dan tercermin pada nilai ruas kanan suatu
kendala tujuan. Dengan kata lain variabel ini berfungsi untuk menampung
deviasi negatif. Variabel deviasi negatif dinotasikan sebagai dan selalu
berkoefisien +1 pada setiap kendala tujuan sehingga bentuk umum fungsi
kendalanya adalah:
di mana: 1,2, … ,
1,2, … ,
2. Variabel Deviasi Positif
Variabel deviasi positif berfungsi untuk menampung deviasi yang berada di
atas tujuan yang dikehendaki. Dengan kata lain variabel deviasi ini berfungsi
untuk menampung deviasi positif. Variabel deviasi positif dinotasikan
sebagai dan selalu berkoefisien -1 pada setiap kendala tujuan sehingga
kendalanya adalah:
atau
di mana: 1,2, … ,
1,2, … ,
Dengan demikian jelas bahwa kedua jenis variabel mendekati sebuah garis
kendala dari dua arah yang berlawanan. Secara matematika hal ini tercermin
pada persamaan berikut:
atau
Karena nilai minimum adalah nol maka persamaan di atas akan
terpenuhi apabila,
Artinya tujuan tercapai
2. 0 dan 0, sehingga
Artinya tujuan tidak tercapai karena
3. = 0 dan 0, sehingga
Artinya akan terlampaui karena
Jadi jelas bahwa kondisi di mana 0 dan 0 pada sebuah kendala
tujuan tidak akan mungkin terjadi.
b. Variabel Keputusan
Seperangkat variabel yang tidak diketahui (dalam model Goal Programming
dilambangkan dengan , di mana 1, 2, … , yang akan dicari nilainya).
Biasanya disebut juga Decision Variables.
c. Nilai Ruas Kanan
Nilai-nilai yang biasanya menunjukkan ketersediaan sumber daya (dilambangkan
dengan ) yang akan ditentukan kekurangan atau kelebihan penggunaannya.
d. Tujuan
Keinginan untuk meminimumkan angka penyimpangan dari suatu nilai RHS pada
suatu goal constraint tertentu. Biasanya disebut juga goal.
e. Kendala Tujuan
Sinonim dari istilah goal equation, yaitu suatu tujuan yang diekspresikan dalam
persamaan metematik dengan memasukkan variabel simpangan. Biasanya disebut
juga Goal Constraint.
f. Urutan Prioritas
Suatu sistim urutan (yang dilambangkan dengan , di mana 1,2, … , dan
menunjukkan banyaknya tujuan dalam model) yang memungkinkan tujuan-tujuan
disusun secara ordinal dalam model Goal Programming. Sistim urutan itu
menempatkan tujuan-tujuan dalam susunan dengan hubungan seperti berikut:
> > … >
merupakan tujuan paling penting.
merupakan tujuan yang kurang penting dan seterusnya.
g. Pembobotan
Timbangan matematika yang diekspresikan dengan bilangan kardinal
(dilambangkan dengan di mana 1,2, … , 1,2, … , ) dan
digunakan untuk membedakan variabel deviasi di dalam suatu tingkat prioritas
yang disebut bobot.
h. Koefisien Fungsi Kendala Tujuan
Nilai-nilai numerik (dilambangkan dengan ) yang menunjukkan penggunaan
nilai per unit untuk menciptakan .
2.4.3 Komponen Goal Programming
Dalam metode Goal Programming pada umumnya terdapat minimal tiga
a. Fungsi Tujuan
Fungsi tujuan dalam Goal Programming pada umumnya adalah masalah minimasi
karena dalam model Goal Programming terdapat variabel deviasi di dalam fungsi
tujuan yang harus diminimumkan. Hal ini merupakan konsekuensi logis dari
kehadiran variabel deviasi dalam fungsi kendala tujuan. Fungsi tujuan dalam Goal
Programming adalah minimasi penyimpangan atau minimasi variabel deviasi.
Ada 4 jenis fungsi tujuan dalam Goal Programming.
1. Minimum
Fungsi tujuan ini digunakan apabila variabel deviasi dalam suatu masalah tidak
dibedakan menurut prioritas atau bobot.
2. Minimum ; 1,2, … ,
Fungsi tujuan ini digunakan apabila urutan dari tujuan diperlukan, tetapi variabel
deviasi setiap tingkat priorotas dari tujuan memiliki kepentingan yang sama.
3. Minimum ; 1,2, … ,
Fungsi tujuan ini digunakan apabila tujuan-tujuan diurutkan berdasarkan prioritas
dan variabel deviasi pada setiap tingkat prioritas dibedakan dengan diberikan
bobot yang berlainan .
4. Minimum ; 1,2, … ,
Fungsi tujuan ini digunakan apabila tujuan-tujuan diurutkan berdasarkan prioritas
i. Kendala Tujuan
Dalam model Goal Programming ditemukan sepasang variabel yang disebut
variabel deviasi dan berfungsi untuk menampung penyimpangan atau deviasi
yang akan terjadi pada ruas kiri suatu persamaan kendala terhadap nilai ruas
kanannya. Agar deviasi ini minimum, artinya ruas kiri suatu persamaan kendala
sedapat mungkin mendekati nilai ruas kanannya maka variabel deviasi ini harus
diminimumkan dalam fungsi tujuan.
Pemanipulasian model Goal Programming yang dilakukan oleh Charnes
Cooper telah mengubah makna kendala fungsional. Pada program linier,
kendala-kendala fungsional menjadi pembatas untuk memaksimumkan atau
meminimumkan fungsi tujuan. Sedangkan pada Goal Programming
kendala-kendala merupakan sarana untuk mewujudkan tujuan yang ingin dicapai.
Tujuan-tujuan yang dinyatakan sebagai nilai konstan pada ruas kanan
kendala, mewujudkan suatu tujuan berarti mengusahakan agar nilai ruas kiri suatu
persamaan kendala sama dengan nilai ruas kanannya. Itulah sebabnya
kendala-kendala di dalam model Goal Programming selalu berupa persamaan yang
dinamakan kendala tujuan.
Bentuk persamaan kendala tujuan secara umum:
, ,
Dan dikonversikan secara umum menjadi:
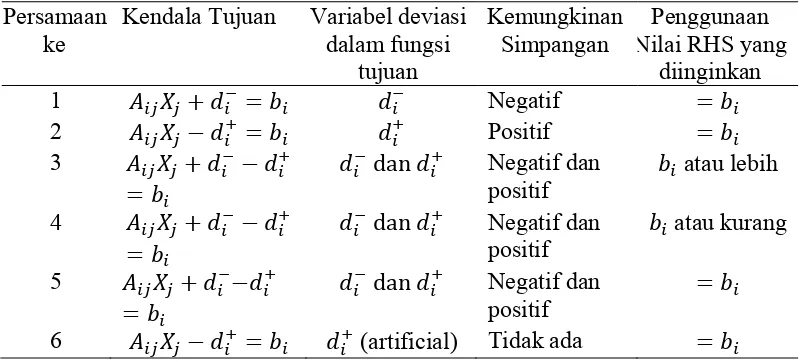
Ada 6 jenis kendala tujuan yang berlainan. Maksud setiap jenis kendala
tujuan ditentukan oleh hubungannya dengan fungsi tujuan. Jenis-jenis kendala
Tabel 2.1 Jenis-Jenis Kendala Tujuan
Persamaan ke
Kendala Tujuan Variabel deviasi dalam fungsi
Dari Tabel 2.1 di atas dapat dijelaskan bahwa pada persamaan pertama
sama dengan pertidaksamaan dalam masalah program linier maksimasi,
persamaan kedua sama dengan pertidaksamaan dalam program linier minimasi.
Sedangkan persamaan ketiga sampai kelima semuanya memperoleh deviasi dua
arah, tetapi persamaan kelima mencari penggunaan sumber daya yang diinginkan
sama dengan . Ini serupa dengan kendala persamaan program linier, tetapi tidak
menempel pada solusi karena mungkin adanya deviasi negatif dan positif. Jika
kendala persamaan dianggap perlu dalam perumusan model Goal Programming,
kendala dapat dimasukkan dengan menempatkan sebuah artificial variable ,
seperti pada persamaan keenam. Persamaan memperbolehkan adanya
penyimpangan positif dan negatif dari nilai RHSnya.
2. Kendala Nonnegatif
Dalam program linier, variabel-variabel bernilai lebih besar atau sama dengan nol.
Demikian halnya dengan Goal Programming yang terdiri dari variabel keputusan
dan variabel deviasi. Keduanya bernilai lebih besar atau sama dengan nol.
Pernyataan nonnegatif dilambangkan dengan , , 0.
2.4.4 Perumusan Masalah Goal Programming
Beberapa langkah perumusan permasalahan Goal Programming adalah sebagai
1. Penentuan variabel keputusan, merupakan dasar dalam pembuatan model
keputusan untuk mendapatkan solusi yang dicari. Makin tepat penentuan
variabel keputusan akan mempermudah pengambilan keputusan yang dicari.
2. Penentuan fungsi kendala tujuan, yaitu tujuan-tujuan yang ingin dicapai oleh
perusahaan.
3. Perumusan fungsi kendala tujuan, di mana setiap tujuan pada sisi kirinya
ditambahkan dengan variabel simpangan, baik deviasi positif maupun deviasi
negatif. Dengan ditambahkannya variabel deviasi, maka bentuk dari fungsi
kendala tujuan menjadi
4. Penentuan prioritas utama. Pada langkah ini dibuat urutan dari tujuan-tujuan.
Penentuan tujuan ini tergantung pada hal-hal berikut:
a. Keinginan dari pengambil keputusan.
b. Keterbatasan sumber-sumber yang ada.
5. Penentuan pembobotan. Pada tahap ini merupakan kunci dalam menentukan
urutan dalam suatu tujuan dibandingkan dengan tujuan yang lain.
6. Penentuan fungsi tujuan. Dalam hal ini, yang menjadi kuncinya adalah
memilih variabel deviasi yang benar untuk dimasukkan dalam fungsi tujuan.
Dalam memformulasikan fungsi tujuan adalah menggabungkan setiap tujuan
yang berbentuk minimasi variabel deviasi sesuai dengan prioritasnya.
7. Penyelesaian model Goal Programming dengan metodologi penyelesaian.
2.4.5 Penyelesaian Model Goal Programming
Metode yang dapat digunakan untuk menyelesaikan model Goal Programming
adalah:
1. Metode Algoritma Simpleks
Algoritma simpleks dapat digunakan untuk menyelesaikan masalah Goal
Programming dengan menggunakan variabel keputusan yang lebih dari dua
variabel. Langkah-langkah penyelesaian Goal Programming dengan metode
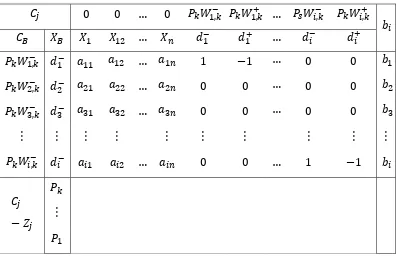
1. Membentuk tabel simpleks awal.
2. Pilih kolom kunci (kolom pivot) yang memiliki nilai negatif terbesar.
3. Pilih baris yang berpedoman pada dengan rasio terkecil dimana adalah
nilai sisi kanan dari setiap persamaan. Baris kunci ini disebut baris pivot.
4. Mencari nilai elemen pivot bernilai 1 dan elemen lain yang bernilai nol.
Dengan demikian diperoleh tabel simpleks iterasi I.
5. Memeriksa optimalitas, yaitu melihat apakah solusi sudah layak atau tidak.
Solusi dikatakan layak bila nilai adalah positif atau nol.
Tabel 2.2 Tabel Simpleks untuk Masalah Goal Programming
0 0 … 0 , , … , ,
… …
, … 1 1 … 0 0
, … 0 0 … 0 0
, … 0 0 … 0 0
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮
, … 0 0 … 1 1