DESAIN DAN IMPLEMENTASI SISTEM KONTROL INTENSITAS LAMPU
MOTOR MENGGUNAKAN LOGIKA FUZZY
DESIGN AND IMPLEMENTATION CONTROL SYSTEM OF THE LIGHT INTENSITY
OF MOTORCYCLE LAMPS USING FUZZY LOGIC METHOD
Miranti Widyastuti1, Drs. Suwandi, M.Si2, Reza Fauzi Iskandar S.Pd, M.T3.
1,2,3 Prodi S1 Teknik Fisika, Fakultas Teknik Elektro, Universitas Telkom.
1[email protected], 2[email protected], 3[email protected]
Abstrak
Lampu utama pada sepeda motor selain berfungsi untuk penerangan saat berkendara pada kondisi gelap, dapat difungsikan sebagai penanda dijalan bahwa sepeda motor sedang melintas. Jika melihat dari sisi pengendara mobil aturan tersebut sangat bermanfaat, namun melihat dari sisi pengendara motor berpendapat bahwa peraturan tersebut adalah pemborosan energi. Untuk menangani kondisi tersebut dibutuhkan suatu sistem yang dapat mengatur intensitas lampu motor secara otomatis dengan menyesuaikan intensitas lingkungan serta kondisi waktu sehingga dapat mengurangi pemborosan daya.
Pada penelitian ini dibuat suatu sistem yang dapat mengendalikan intensitas lampu motor, metode yang digunakan menggunakan logika fuzzy. Untuk sensor cahaya lingkungan menggunakan LDR (Light Dependent Resistor) serta untuk mendeklarasikan kondisi waktu menggunakan RTC (Real Time Clock). Pada sistem ini menggunakan mikrokontroler ATmega 32 untuk dilakukan pemrograman logika fuzzy serta komponen yang dibutuhkan. Pengontrolan menggunakan logika fuzzy dapat menurunkan penggunaan daya. Dari keempat percobaan menunjukkan bahwa percobaan ke-3 yang dapat menurunkan penggunaan daya paling besar dengan memiliki rata-rata selisih daya menggunakan fuzzy dengan tanpa fuzzy sebesar 24,19 watt.
Kata kunci : DRL (Daytime Running Light), Mikrokontroler ATmega32, LDR (Light Dependent Resistor), RTC (Real Time Clock), Logika Fuzzy
Abstract
The lamps on motorcycles in addition to work for lighting when driving in the dark, it can be used as a marker on the road that there is a motorcycle passing by. If viewed from the side of the car driver that rules is very useful, but if viewed from the side of the motorcycle driver say that turn on the lamps in the day is a waste of energy. To manage the condition we needs a system that can control automatic the intensity lamps that adjust the intensity of the environment and condition of the time, so as to reduce a waste of power.
In this study created a system that can control the intensity light of motorcycle lamps, the control method using fuzzy logic. For the light of enviroment using the LDR (Light Dependent Resistor) and to declare the condition of the time using RTC (Real Time Clock). In the system uses a microcontroller Atmega32 to fuzzy logic programming and to program components required. In the testing system performed 4 times with the variation of membership function for LDR and RTC. Controlling using fuzzy logic can reduce usage the power. Of the four experiments showed that the three of experiments can reduce biggest usage the power by having average difference of power using fuzzy with no fuzzy at 24,19 watt.
Keywords: DRL (Daytime Running Light), Microcontroller ATmega32, LDR (Light Dependent Resistor), RTC (Real Time Clock), Fuzzy Logic.
1. Pendahuluan
dari keadaan normalnya sehingga dapat menghemat penggunaan daya aki. Berdasarkan latar belakang yang telah dipaparkan, pada tugas akhir ini akan dibuat sistem kontrol intensitas cahaya lampu motor yang dapat menyesuaikan intensitas lingukungan serta kondisi waktu. Sehingga diharapkan sistem ini dapat mengurangi penggunaan daya berlebih. Metode yang digunakan untuk sistem pengontrolan menggunakan logika fuzzy.
2. Dasar Teori
2.1 Sistem Minimum Mikrokontroler ATmega32
Sistem minimum merupakan rangkaian elektronik minimum yang diperlukan untuk mengoperasikan IC mikrokontroler. Sistem minimum ini bisa dihubungkan dengan rangkaian lainnya untuk menjalankan suatu fungsi tertentu. IC mikrokontroler yang biasa digunakan adalah keluarga dari mikrokontroler AVR, salah satunya ATmega [4].
2.2 Light Dependent Resistor (LDR)
Light Dependent Resistor (LDR) merupakan komponen elektronika yang mempunyai sifat yang sama dengan
resistor yaitu berupa hambatan. Namun berbeda dengan resistor pada umumnya, nilai resistansi pada LDR ini dapat berubah-ubah sesuai dengan tingkat intensitas cahaya yang diterima. Sehingga dari definisi LDR sendiri, maka LDR dapat digunakan sebagai sensor cahaya [8].
Berikut grafik hubungan antara intensitas cahaya terhadap resistansi LDR :
Gambar 2.1 Grafik hubungan antara intensitas terhadap resistansi [9]
2.3 Kontrol Logika Fuzzy
Kontrol logika fuzzy merupakan suatu sistem kontrol berbasis linguistik dengan meniru logika manusia dalam menyelesaikan suatu permasalahan. Berbeda dengan logika boolean yang hanya mengenal dua nilai yaitu 0 atau 1, iya atau tidak dan hitam atau putih. Logika fuzzy sendiri memiliki jumlah nilai tak hingga dengan rentang 0 sampai 1. Dalam membuat sebuah sistem kontrol fuzzy terdapat tiga tahapan yaitu fuzzifikasi, inferensi dan defuzzifikasi. Ketiga hal tersebut mutlak dilakukan untuk mendapatkan sistem kontrol yang baik.
Berikut skema kerja dari sistem kontrol logika fuzzy [11] :
2.3.1 Fuzzifikasi
Fuzzifikasi merupakan proses konversi nilai numerik ke dalam bentuk linguistik. Dimana bentuk linguistik disebut sebagai fungsi keanggotaan, yang memiliki nilai dari 0 sampai 1 yang disebut dengan derajat keanggotaan [11]. Terdapat beberapa fungsi keanggotaan yang dapat digunakan, diantaranya [10]:
1. Fungsi Segitiga
Bentuk segitiga pada dasarnya merupakan gabungan antara 2 garis kurva linear. Berikut adalah fungsi kurva segitiga dengan parameter (a,b,c):
Fungsi keanggotaan :
Gambar 2.2 Fungsi keanggotaan kurva segitiga
µ(x) = {
0; � < ������≥�
�−�
; �≤�≤�
�−� �−�
; � < �≤�
{
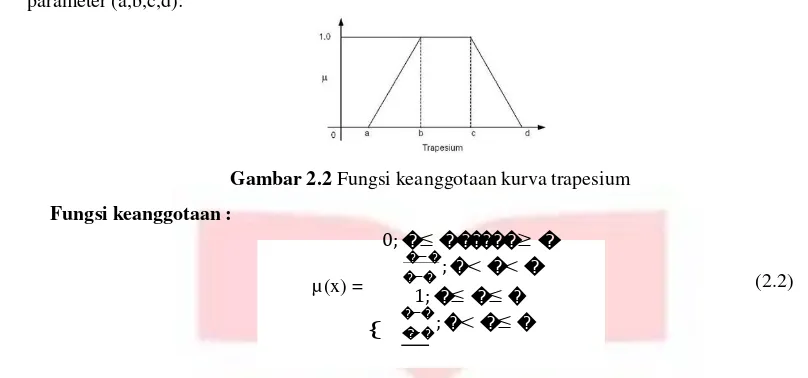
2. Fungsi Trapesium
Fungsi trapesium pada umumnta hampir sama dengan fungsi segitiga, hanya saja pada fungsi ini memiliki beberapa titik yang nilai anggotanya sama dengan 1. Berikut persamaan fungsi trapesium yang memiliki parameter (a,b,c,d):
Gambar 2.2 Fungsi keanggotaan kurva trapesium
Fungsi keanggotaan :
Inferensi merupakan tahap pengambilan keputusan berdasarkan input fuzzy dan basis aturan yang ada. Pada tahap ini, basis aturan dibuat sesuai penalaran atau logika manusia dan memiliki bentuk aturan IF-THEN. Untuk mebuat basis aturan terdapat dua model yang digunakan dalam berbagai aplikasi, yaitu [10]:
2.3.2.1 Model Sugeno
Model Sugeno memiliki aturan fuzzy sebagai berikut :
IF �1 is ��1 AND… AND �𝑛 is ��𝑛 THEN y = f (�1…�𝑛) (2.3)
Dimana f dapat berupa suatu sembarang fungsi dari variabel input yang mempunyai nilai masih di dalam interval variabel output. Biasanya dalam fungsi ini dibatasi dengan menyatakan f sebagai kombinasi linier dari variabel inputnya sebagai berikut :
f (�1…�𝑛) = �0 +�1 +… + �𝑛�𝑛 (2.4)
Dimana = �0 ,�1 , … , �𝑛merupakan suatu konstanta yang berupa bilangan real yang menjadi bagian dari
spesifikasi basis aturan.
2.3.3 Defuzzifikasi
Defuzzyfikasi merupakan proses mengubah output fuzzy yang diperoleh dari hasil inferensi menjadi nilai numeris menggunakan fungsi keanggotan yang sesuai dengan saat dilakukan fuzzifikasi [11]. Terdapat beberapa model metode defuzzifikasi diantaranya [10]:
2.3.3.1 Weight Average
Metode ini mengambil nilai rata-rata dengan cara menggunakan pembobotan berupa derajat keanggotaan, sehingga metode ini mempunyai persamaan sebagai berikut:
Y = ∑ µ𝑅µ (���( ) �)� Keterangan : µR(y) = derajat keanggotaan dari y
(2.5)
2.4 Daya Listrik
Menurut pengertian daya listrik adalah besaran listrik yang menyatakan besarnya energi yang digunakan. Salah satu fungsi mengetahui daya pada suatu rangkaian elektrik adalah berhubungan dengan hemat energi. Hal ini jika tidak diperhatikan maka akan terjadi kerugian daya yang cukup besar. Maka dari itu pentingnya mengetahui daya yang digunakan pada rangkaian elektrik. Besarnya daya listrik DC maupun AC dapat dihitung berdasarkan rumus berikut [12]:
y = -11 ,02x + 7006,8 5
Keterangan : P = Daya (watt) V = Tegangan (Volt) I = Arus (Ampere)
3. Pembahasan
3.1 Hasil linearisasi sensor cahaya LDR
Pada LDR dirangkai rangkaian pembagi tegangan agar dapat dihubungkan dengan mikrokontroler. Cara kerja sensor ini adalah kaki resistor diberi tegangan 5v sedangkan kaki LDR dihubungkan dengan ground dan pertemuan kedua kaki resistor dan LDR dihubungkan pada port ADC sehingga pada saat LDR menerima cahaya nilai tegangan kecil namun jika LDR tidak menerima cahaya nilai tegangan besar.
4000
3000
2000
1000
0
0 20 40 60
Gambar 3.1 Grafik linearisasi LDR terhadap intensitas cahaya
3.2 Hasil Kalibrasi Jam dengan RTC
Pada perancangan jam menggunakan modul RTC DS1307, kemudian diimplementasikan untuk mengetahui kesiapan RTC yang akan diprogram menggunakan CVAVR. Setelah pembacaan jam oleh RTC telah berhasil kemudian data tersebut akan dikonversi agar dapat diolah kedalam sistem kontrol fuzzy. Pada kasus ini data tersebut dikonversi menggunakan persamaan: (y) = 5x
300
Keterangan : x = Menit
y = Bilangan yang akan dimasukkan pada fuzzy
Persamaan yang telah didapatkan kemudian akan diuji sehingga perubahan bentuk nilai keluaran RTC dapat digunakan sebagai masukan sistem fuzzy. Berikut adalah data hasil pengujian persamaan RTC :
Tabel 1 Data hasil pengujian persamaan RTC
RTC (JAM) RTC (Fuzzy) Perhitungan Manual Error (%)
16:00:13 16 16 0
19:00:18 19 19 0
17:30:13 17,5 17,5 0
14:30:10 14,5 14,5 0
3.3 Hasil Pengujian Sistem Kontrol Fuzzy
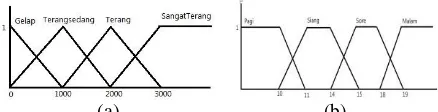
Pada pengujian sistem kontrol fuzzy dilakukan sebanyak 4 kali dengan tahap fuzzifikasi bervariasi dan tahap infenrensi menggunakan model sugeno dan defuzzifikasi menggunakan metode weight average untuk semua percobaan. Berikut adalah perancangan fuzzy:
Percobaan ke-1:
(a) (b)
Percobaan ke-2:
(a) (b)
Gambar 3.3 (a) Fungsi keanggotaan LDR, (b) Fungsi keanggotaan RTC
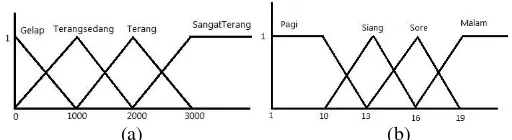
Percobaan ke-3:
(a) (b)
Gambar 3.4 (a) Fungsi keanggotan LDR, (b) Fungsi keanggotaan RTC
Percobaan ke-4:
(a) (b)
Gambar 3.5 (a) Fungsi keanggotaan LDR, (b) Fungsi keanggotaan RTC
Tabel 2 Aturan basis
Aturan Kondisi Lingkungan (LDR) Kondisi Waktu (RTC) Keluaran (Lampu)
1. Gelap Pagi Terang Sedang
2. Gelap Siang Terang
3. Gelap Sore Terang Sedang
4. Gelap Malam Terang Sedang
5. Terang Sedang Pagi Terang Sedang
6. Terang Sedang Siang Terang
7. Terang Sedang Sore Terang
8. Terang Sedang Malam Terang
9. Terang Pagi Terang
10. Terang Siang Sangat Terang
11. Terang Sore Terang
12. Terang Malam Terang
13. Sangat Terang Pagi Terang
14. Sangat Terang Siang Sangat Terang
15. Sangat Terang Sore Terang
Da
y
a
(Wa
tt)
(a) (b)
(c) (d)
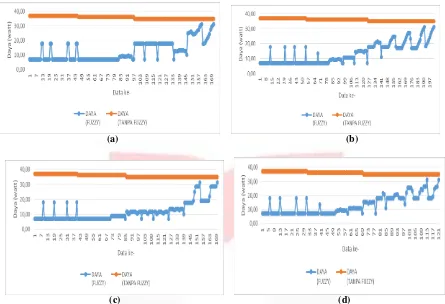
Gambar 3.6 (a) Grafik perbandingan antara daya fuzzy dengan non fuzzy (Percobaan ke-1), (b) Grafik perbandingan antara daya fuzzy dengan non fuzzy (Percobaan ke-2), (c) Grafik perbandingan antara daya fuzzy dengan non fuzzy (Percobaan ke-3), (d) Grafik perbandingan antara daya fuzzy dengan non fuzzy (Percobaan ke-4)
24,50 24,00 23,50 23,00 22,50 22,00 21,50
Percobaan Percobaan Percobaan Percobaan
Ke-1 ke-2 Ke-3 Ke-4
Gambar 3.7 Grafik rata-rata selisih daya semua percobaan
Pada gambar 3.7 menunjukkan rata-rata selisih daya menggunakan fuzzy dengan tanpa fuzzy pada percobaan ke- 1 sebesar 23,19, pada percobaan ke-2 sebesar 22,55, percobaan ke-3 sebesar 24,19 dan percobaan ke-4 sebesar 22,82.
4. Kesimpulan
Berdasarkan hasil perancangan, implementasi dan pengujian sistem dapat disimpulkan bahwa:
1. Pengontrolan menggunakan logika fuzzy dapat menurunkan penggunaan daya. Dari keempat percobaan menunjukkan bahwa percobaan ke-3 yang dapat menurunkan penggunaan daya paling besar dengan memiliki rata-rata selisih daya menggunakan fuzzy dengan tanpa fuzzy sebesar 24,19 watt.
2. Untuk pengukuran arus masih dilakukan secara manual sedangkan pengukuran tegangan masih memiliki error yang besar yaitu 17,438%.
Daftar Pustaka
[1] Dukalang, Andi. 2014. Efektifitas pasal 107 ayat (2) UU No 22 tahun 2009 tentang Lalu Lintas dan Angkutan Umum. Skripsi. Gorontalo: Program Studi Ilmu Hukum Fakultas Ilmu Sosial Universitas Negeri Gorontalo. [2] Irwanto, Dedi. 2014. Efektifitas Pasal 107 Ayat 2 Tentang Menyalakan Lampu Di Siang Hari Bagi Pengendara Sepeda Motor Berdasarkan UU No 22 Tahun 2009 Tentang Lalu Lintas dan Angkutan Jalan Di Wilayah POLSEK Tulangan Sidoarjo. Skripsi. Surabaya: Program Studi Ilmu Hukum Fakultas Hukum Universitas Pembangunan Nasional “Veteran” Jawa Timur.
[3] Sulistiyanto, Jefri. 2013. Implementasi Kebijakan Light On Di Wilayah Kabupaten Bantul. Skripsi. Yogyakarta. Jurusan Ilmu Administrasi Negara Fakultas Ilmu Sosial Universitas Negeri Yogyakarta.
[4] http://www.mikron123.com Rangkaian Sistem Minimum AVR 8535 [Akses 28 Februari 2016 pukul 13.30].
[5] Harmaini. 2015. Rancang Bangun Perangkat Lunak Alat Pengelompokan Buah Kopi Berdasarkan Warna Secara Otomatis Via Short Message Service (SMS) Berbasis Mikrokontroler ATmega32. Laporan Akhir. Palembang: Jurusan Teknik Elektro Program Studi Teknik Telekomunikasi Politeknik Negeri Sriwijaya.
[6] “Landasan Teori Mikrokontroler AVR ATMga 32L”,
http://library.binus.ac.id/eColls/eThesisdoc/Bab2/2009-2-00424-SK%20Bab%202.pdf. [Akses 13 Oktber 2016]
[7] “Programmer K-125R” http://repository.usu.ac.id/bitstream/123456789/30689/3/Chapter%20III-V.pdf
[Akses 20 November 2016 Pukul 22.19]
[8] Carolina Barus, Ester Margaret. 2012. Rancang Bangun Sistem Atap Otomatis Berbasis Mikrokontroler ATMEGA8535. Skripsi. Medan: Jurusan Fisika Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Negeri Medan.
[9] http://www.electrical4u.com Working Principle of Light Dependent Resistor. [Akses 27 Februari 2016 pukul
23.35].
[10] Pratama, Anggara Andi. 2014. Perancangan dan Realisasi Prototype Sistem Kontrol Otomatis Untuk Kandang Anak Ayam Menggunakan Metode Logika Fuzzy (Pemberi Pakan, Conveyor Berjalan, Kendali Suhu dan Kelembaban). Skripsi. Bandung: Program Studi Teknik Elektro Fakultas Teknik Elektro Universitas Telkom. [11] Pauzi, Fahmi Firman. 2016. Kontrol Kedalaman Selam Robot Bawah Air Menggunakan Sensor Ultrasonik Dengan Metode Logika Fuzzy. Skripsi. Bandung: Program Studi S1 Teknik Fisika Fakultas Teknik Elektro Universitas Telkom.
![Gambar 2.1 Grafik hubungan antara intensitas terhadap resistansi [9]](https://thumb-ap.123doks.com/thumbv2/123dok/3031715.1715764/2.596.168.433.274.423/gambar-grafik-hubungan-intensitas-resistansi.webp)