84
MOMENTUM SUDUT DAN BENDA TEGAR
I. IDENTITAS
Mata kuliah : Fisika Umum
Program Studi : Fisika/Pendidikan Fisika
Jurusan : Fisika
Fakultas : MIPA
Dosen : Tim Fisika Umum
SKS : 4 sks
Kode : FMA 019
Minggu ke : 7 dan 8
II. CAPAIAN PEMBELAJARAN
Mengaplikasikan konsep dasar tentang momentum sudut dan benda tegar serta menerapkannya pada persoalan fisika sederhana
III. MATERI
A. Pendahuluan
Pada Pokok Bahasan sebelumnya, mulai dari Kinematika, Dinamika, Usaha dan Energi, sampai Momentum Linier, pembahasan masih dibatasi pada partikel atau titik materi, di mana ukuran partikel tidaklah diperhitungkan. Ini berarti semua benda dianggap sebagai partikel atau titik, sebuah kelereng, sebuah bola volly, atau sebuah mobil, sebuah kapal api atau sebuah pesawat terbang semua dianggap sebuah titik, berapapun besarnya.
Pada Pokok Bahasan Momentum Sudut dan Benda Tegar yang akan dibahas selanjutnya, adakalanya ukuran benda tidak lagi bisa diabaikan, harus diperhitungkan. Pembahasan akan dimulai dari momentum sudut partikel, sistem partikel, dan benda tegar, dilanjutkan dengan perbandingan antara gerak translasi dan gerak rotasi, terutama tentang hukum-hukum Newton, uasaha dan energi, termasuk momentum. Terakhir, akan dibahas tentang keseimbangan benda tegar atau statika benda tegar
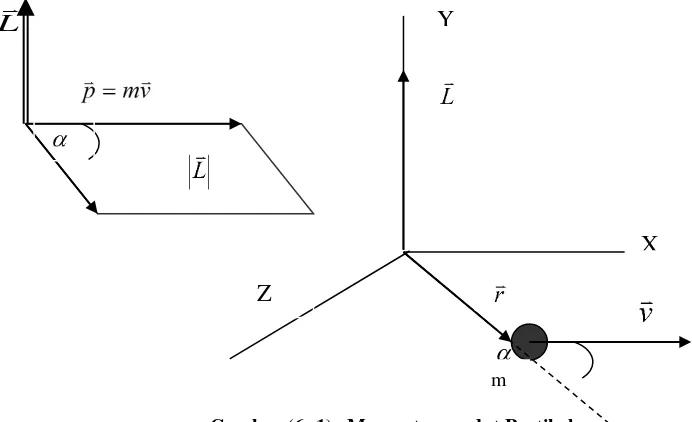
B. Momentum Sudut Partikel Tunggal
L
Gambar (6- 1). Momentum sudut Partikel
r
m Z
Y
85 Jika sebuah benda melakukan gerak lurus atau gerak translasi, sebuah partikel yang bergerak dengan kecepatan v, diketahui mempunyai momentum sebesar p = mv, yang arahnya sama dengan arah kecepatan partikel. Bagaimana pula jika benda melakukan gerak melingkar atau gerak lengkung lainnya ? Sama halnya dengan pada gerak lurus, partikel yang bergerak melingkar atau gerak lengkung lainnya juga mempunyai momentum p, tetapi arahnya selalu berubah tergantung arah kecepatannya setiap saat. Di samping itu, partikel tersebut juga mempunyai momentum sudut yang disimbulkan dengan L dan didefenisikan sebagai :
v x r m p x r
L , (6-1) di mana radalah vektor posisi, yang menunjukkan posisi di mana partikel itu berada, sedangkan besar momentum sudut partikel tersebut adalah :
L Lrp sin α = m r v sin α (6-2) Dari defenisi tersebut, jelaslah bahwa momentum sudut adalah besaran vektor, yang dihasilkan dari perkalian silang antara vektor posisi rdan momentum p, sehingga arahnya tegak lurus terhadap bidang yang dibentuk oleh kedua vektor tersebut, sesuai dengan kaidah tangan kanan, seperti diperlihatkan pada Gambar (6-1). Dalam sistem Satuan Internasional (SI), momentum sudut dinyatakan dalam kg m2 /sec.
C. Hubungan Perubahan Momentum Sudut dengan Momen Gaya
Pada Pokok Bahasan Momentum Linier, gaya Fyang bekerja pada sebuah benda bermassa m, didefenisikan sebagai perubahan momentum linier benda persatuan waktu, sesuai dengan hukum Newton II, yakni :
dt p d a m F
Bagaimana pula kaitannya dengan momentum sudut benda ?
Jika terhadap persamaan (6-3) dilakukan perkalian silang dengan vektor posisir, akan diperoleh :
r x F = r x
t d
p d
(6-3) Sebetulnya dari persamaan (6-3), dapat ditulis dalam bentuk lain, yakni :
r x F =
dt d
86
dt d
( r x p ) = t d
r d
x p + r x
t d
p d
.
Dengan mengubah v = t d
r d
, dan p = mv, persamaan (6-5) dapat ditulis :
dt d
( r x p ) = v x m v + r x t d
p d
. Karena v x m v = 0, maka :
dt d
( r x p ) = r x t d
p d
.
atau r x F =
dt d
( r x p )
Dengan demikian persamaan ( 6-3 ) dapat ditulis :
dt L d F x r
(6-4)
Besaran r x F disebut vektor momen gaya atau torsi ( ), jadi :
dt L d F x r
(6-5)
Persamaan (6-5) ini menyatakan hubungan antara momen gaya dengan perubahan momentum sudut dL, tepat seperti hubungan antara gaya F dengan perubahan momentum linier dp yang dinyatakan oleh hukum II Newton .
Sama halnya dengan hukum Newton I, maka apabila resultan momen gaya yang bekerja pada benda sama dengan nol, maka perubahan momentum sudut juga sama dengan nol, artinya momentum sudut sama dengan nol untuk benda yang sedang diam, atau momentum sudut konstan untuk benda yang sedang bergerak. Secara matematis dapat ditulis :
L = 0 Jika Σ = 0, maka
dt L d
= 0, atau (6-6) L = konstan
87
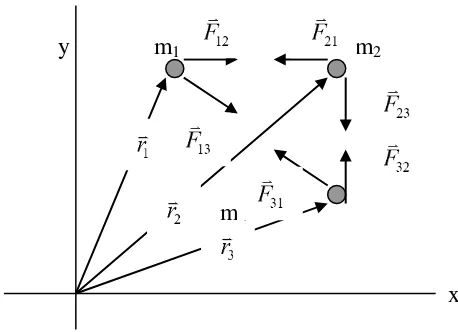
D. Momentum Sudut Sistem Partikel
Misalkan suatu sistem yang terdiri dari tiga partikel dan pada sistem tersebut tidak ada gaya luar yang bekerja, jadi yang ada hanya gaya internal, yaitu gaya interaksi antara partikel-partikel dalam sistem, seperti terlihat pada Gambar (6-2). Gaya yang dialami oleh partikel 1 adalah :
Gambar (6-2). Momentum Sudut Sistem Partikel
3
Sedangkan momen gaya partikel tersebut berturut-turut adalah :
dt
88
dt L d L L L dt
d
3 2 1
3 2 1
(6-8)
di mana L L1L2 L3 adalah momentum sudut total dari sistem partikel.
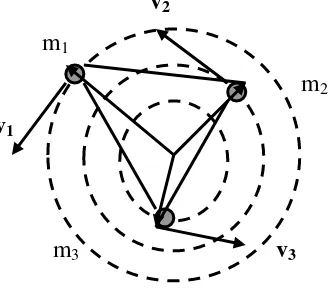
E. Momentum Sudut Benda Tegar
Suatu sistem banyak partikel, di mana setiap partikelnya bergerak secara bebas, sehingga jarak antara partikel dapat berubah-ubah setiap saat, disebut sistem partikel bebas. Jika partikel-partikel dalam sistem tersebut dihubungkan dengan sebuah kawat kaku, seperti diperlihatkan oleh 3 partikel pada Gambar (6-3) , maka sistem ini disebut benda tegar, karena jarak antar partikel tidak akan berubah, meskipun sistem ini bergerak. v2
m1
m2
v1
m3 v3
Gambar (6-3). Momentum Sudut Sistem Partikel
Jika benda tegar ini diputar dengan sumbu putar tegak lurus terhadap pusat massa sistem ini, maka kecepatan linier ketiga partikel berbeda, sedangkan kecepatan sudutnya haruslah sama. Momentum sudut partikel pertama adalah :
L1 = r1 xp1 = m1 r1 xv1
= m1ri x ( xr1 ).
Dengan menggunakan sifat perkalian silang a (b c) b(a c) c(a b)
, maka persamaan ini
dapat dibuat lebih sederhana menjadi :
r1(1r1)1(r1r1)r1(r11).
Jika vektor r terletak pada bidang di mana benda bergerak melingkar, maka r1 tegak lurus
89 r1 r1cos900 0,
maka : r1(r1)r21,
artinya momentum sudut partikel 1 dapat ditulis sebagai :
1 2 1 1 mr
L .
Dengan cara yang sama dapat disimpulkan bahwa momentum sudut partikel 2 dan 3 , adalah :
2 2 2 2 mr
L ,
3 2 3 3 mr
L ,
sedangkan momentum sudut total sistem ini adalah :
L (m r m r m r ) , ,
L L L L
3 2 3 2 2 2 1 2 1
3 2 1
. (6-7)
Besaran (m1r21m2r22m3r23) disebut momen inersia sistem, biasa disimbulkan
dengan I, di mana :
3
1 i
2 i ir
m
I . (6-8) Dengan demikian, persamaan (6-7) dapat ditulis :
L = I . (6-9)
Persamaan (6-9) ini menunjukkan bahwa hubungan antara L, I dan mirip dengan hubungan antara momentum linier p, m dan v pada gerak translasi, yaitu :
p = mv.
Karena masing-masing partikel pada sistem di atas terpisah, maka partikel-partikel dalam sistem tersebut dikatakan terdistribusi secara diskrit. Jika jumlah partikel dalam sistem besar sekali, sehingga memenuhi ruangan sekitar pusat massa, maka sistem ini disebut benda pejal, sedangkan distribusi partikel dalam sistem ini disebut kontinu. Perlu diingat, bahwa tidak semua sistem partikel dengan distribusi kontinu bersifat sebagai benda tegar, contohnya air. Momen inersia benda pejal adalah :
90
Tabel 1. Momen Inersia Benda Tegar
Bentuk Benda Pejal Momen Inersia
Silinder tipis atau roda I = MR2
Silinder tebal I = ½ M (R12 +R12)
Silinder pejal I = ½ MR2
Batang/tongkat tipis I = ½ ML2
Bola pejal I = 2/5 MR2
Bola tipis I = 2/3 MR2
Jika sumbu putar tidak melalui pusat massa benda, maka momen inersia benda dapat dihitung dengan menggunakan dalil atau theorema sumbu sejajar berikut ini :
I = Io + Ma2 (6-11)
di mana I = Momen inersia benda dengan sumbu putar tidak melalui pusat massa, Io = Momen inersia benda dengan sumbu putar tidak melalui pusat massa,
M = Massa benda,
a = Jarak antara sumbu putar dengan pusat massa.
Agar lebih jelas marilah kita coba untuk menghitung momen inersia sebuah benda yang diputar melalui pusat massa, dan penggunaan dalil sumbu sejajar untuk menghitung momen inersia benda, melalui contoh soal berikut ini :
Contoh soal 1
Sebuah batang homogen yang panjangnya L dan massanya M dan luas penampangnya A berputar pada suatu sumbu di tengah-tengah batang.
a). Tunjukkan bahwa momen inersia batang tersebut adalah
12 1
ML2.
b), Jika batang ini diputar dengan sumbu putar di ujung batang, momen inersianya menjadi :
3 1
ML2. c).
Tunjukkan jawaban soal b dengan menggunakan dalil sumbu sejajar.
dm
... r... dr ...
--- L ---
Gambar (6-4)
Io =
12 1
M L2 (terbukti)
b). Jika batang diputar di tengah-tengah batang, batas integral yang digunakan adalah dari
-2 1
L ke +
2 1
L, sedangkan jika diputar di
91
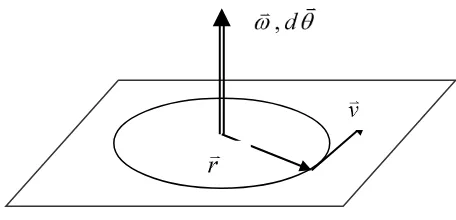
Selanjutnya, jika suatu benda tegar berotasi dengan kecepatan sudut , maka laju dari bagian benda tegar yang terletak pada jarak r dari sumbu putar adalah :
putar, sesuai arah perpindahan sekrup, jika diputar ke kanan akan maju, dan jika diputar ke kiri, akan mundur.gerak rotasi.
Vektor kecepatan linier dari benda yang bergerak melingkar dengan kecepatan sudut dan berada pada posisi r, mempunyai arah tangensial, dalam notasi vektor dapat
ditulis :
r v
92 Gambar (6-4)
Persamaan ini menunjukkan bahwa v adalah tegak lurus danr, dan pada arah sejajar dengan perpindahan sekrup jika diputar dari arah ke arah r . Hubungan ini
juga berlaku untuk hal yang lebih umum, yaitu jika titik asal 0 dari sumbu koordinat tidak terletak pada pusat lingkaran gerak. Dalam hal ini maka arah v adalah tegak lurus arah dan r , sedangkan besar v diberikan oleh:
v = r sin θ di mana θ adalah sudut yang dibentuk antara dan r .
F. Analogi Gerak Rotasi dengan Gerak Translasi
Jika dibandingkan antara gerak rotasi dan gerak translasi, terlihat banyak besaran-besaran yang identik, yang bisa dianalogikan satu sama lain, misalnya besar perpindahan
sudut ( θ ), identik dengan perpindahan linier (x), melalui persamaan x = R θ, kecepatan
sudut ω dengan kecepatan linier v, melalui persamaan v = ωR, dan lain sebagainya. Di
samping itu, selanjutnya juga akan terlihat bahwa persamaan-persamaan yang berlaku pada gerak translasi, juga dapat digunakan untuk gerak rotasi, dengan mengganti besaran linier menjadi besaran anguler atau besaran sudut. Untuk lebih jelasnya analogi besaran-besaran pada kedua jenis gerak tersebut dapat dilihat pada Tabel 1, berikut ini.
Tabel 1. Analogi besaran sudut dan besaran linier
Gerak Rotasi Gerak Translasi Persamaan
93 Momen inersia : I Massa : m
I =
n
i 2
mR
I =
R2 dmMomentum sudut : L Momentum linier : p L = p R
G. Dinamika Benda Tegar
Pada gerak translasi, hubungan antara gaya dan percepatan dinyatakan oleh hukum II Newton, yakni :
F = ma, atau F = ma
Bagaimana pula jika hukum ini dikaitkan dengan dinamika benda tegar ?
Jika ruas kiri dan ruas kanan sama-sama dikali dengan R, dan mengganti a dengan R
α, diperoleh :
F R = m R2α (6-12)
Besaran FR adalah momen gaya (τ), sedangkan mR2 adalah momen inersia, maka persamaan di atas dapat ditulis :
τ = I α (6-13) atau bila dinyatakan dalam bentu vektor :
= I
Persamaan (6-13) memperlihatkan hubungan antara besar momen gaya (τ) yang dikerjakan pada benda, dengan besar percepatan sudut (α) benda yang dihasilkan oleh momen gaya tersebut. Hubungan ini identik dengan hubungan antara gaya F dengan percepatan a yang dihasilkannya. Oleh sebab itu, persamaan (6-13) disebut sebagai pernyataan matematis hukum II Newton untuk gerak rotasi benda tegar. Untuk selanjutnya, dalam menyelesaikan permasalahan yang ditemui pada gerak rotasi, kita dapat mempedomani persamaan-persamaan yang ada pada gerak translasi, tentu saja dengan mengganti besaran-besaran linier dengan besaran anguler, sesuai persamaan yang berlaku, seperti tertera pada Tabel 1.
Selanjutnya, bagaimana pula dengan usaha dan energi pada benda tegar ?
Pada gerak translasi, usaha yang dilakukan oleh sebuah gaya F, yang menyebabkan benda berpindah sejauh x, secara umum dirumuskan dengan :
W =
2
1
x
x
F
94 Dengan mengganti F dengan
R
, dan dx dengan Rdθ, maka diperoleh usaha W yang
dilakukan oleh momen gaya τ, yang mengakibatkan terjadinya perpindahan sudut dari θ1 ke θ2, yakni :
2
1 d
W (6-14)
Benda tegar yang melakukan gerak rotasi, mempunyai energi kinetik yang disebut energi kinetik rotasi, yang dapat diperoleh berdasarkan energi kinetik translasi, yakni
Ek = 2 1
mv2. Jika v2 diganti dengan ω2R2, diperoleh :
Ek = 2 1
m R2ω2,
dan karena kuantitas mR2 adalah bentuk umum rumusan momen inersia, maka energi kinetik rotasi sebuah benda tegar yang bermomen inersia I, dan berotasi dengan kecepatan
sudut ω, adalah :
Ek = 2 1
I ω2
. (6-15)
Tidaklah berbeda halnya dengan gerak translasi, pada gerak rotasi juga berlaku hubungan antara usaha dan energi.
Jika dalam sebuah sistem terdapat beberapa bagian, satu bagian bergerak translasi, sedangkan bagian lain bergerak rotasi, maka dalam menyelesaikan masalah ini, kita dapat menggunakan persamaan gerak translasi untuk bagian yang bertranslasi, dan persamaan gerak rotasi untuk bagian yang berotasi. Agar lebih jelas, marilah kita bahas contoh-contoh soal di bawah ini.
Contoh soal 2
95 Jawab :
///////////////////////////////////////
Gambar (6-5) a
/////////////////////////////////////// T
T1 T2
T2 T1
w2
w1 Gambar (6-5) b
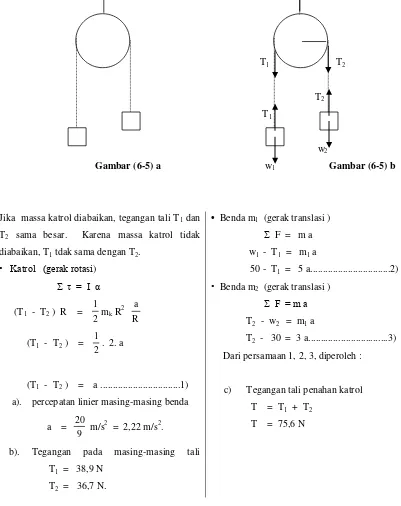
Jika massa katrol diabaikan, tegangan tali T1 dan T2 sama besar. Karena massa katrol tidak diabaikan, T1 tdak sama dengan T2.
• Katrol (gerak rotasi) Σ τ = I α
(T1 - T2 ) R = 2 1
mk R 2
R a
(T1 - T2 ) =
2 1
. 2. a
(T1 - T2 ) = a ...1) a). percepatan linier masing-masing benda
a =
9 20
m/s2 = 2,22 m/s2.
b). Tegangan pada masing-masing tali T1 = 38,9 N
T2 = 36,7 N.
• Benda m1 (gerak translasi ) Σ F = m a w1 - T1 = m1 a
50 - T1 = 5 a...2)
• Benda m2 (gerak translasi ) Σ F = m a T2 - w2 = m1 a
T2 - 30 = 3 a...3) Dari persamaan 1, 2, 3, diperoleh :
c) Tegangan tali penahan katrol T = T1 + T2
T = 75,6 N
Contoh soal 3
96 Jawab :
a). Untuk gerak rotasi berlaku : ω = ωo + α t,
Roda berhenti setelah 100 detik, jadi : ω = ωo + α2 t,
c). Jumlah putaran yang dialami benda adalah jumlah putaran 10 detik pertama, ditambah 100 detik berikutnya, sehingga : suatu sistem partikel sama dengan nol, maka momentum sudut total dari sistem partikel itu tetap, baik besar maupun arahnya. Secara matematis hal ini dirumuskan sebagai berikut :
L =
resultan momen gaya yang bekerja padanya sama dengan nol, atau dapat ditulis :L = I = konstan.
97 dengan cara mengembangkan kedua tangannya, agar jari-jari putarannya juga makin besar. Begitu juga sebaliknya, bila ia ingin mempercepat putarannya, ia akan merapatkan kedua tangannya ke tubuhnya, dengan maksud agar momen inersianya menjadi lebih kecil, sehingga kecepatan sudutnya menjadi lebih besar. Contoh lain dapat pula dilihat misalnya pada seorang atlit loncat indah, seperti diperlihatkan pada gambar (6-6).
I. Gerak Menggelinding
Menggelinding (terguling) adalah kombinasi dari gerak translasi dan gerak rotasi yang sekaligus dilakukan oleh sebuah benda pada saat yang bersamaan, misalnya sebuah silinder pejal seperti ditunjukkan pada Gambar (6-7).
N
fs x
w
Gambar (6-7). Menggelinding
Kalau diperhatikan gaya-gaya yang bekerja pada silinder ini, gaya berat w dan gaya normal N, tidaklah menghasilkan momen putar pada silinder, karena bekerja di pusat massa. Satu-satunya gaya yang menghasilkan momen putar adalah gaya gesekan statis fs,
gaya inilah yang menyebabkan silinder berputar, artinya jika gaya gesekan tidak ada, misalnya karena permukaan licin, peristiwa menggelinding tidak akan terjadi. Hal ini dapat dicontohkan dengan roda mobil yang bergerak di jalanan licin akibat hujan, roda tidak bisa menggelinding, tetapi meluncur yang diistilahkan dengan slip. Hal ini jelas sangat berbahaya, karena bisa menimbulkan kecelakaan.
98 Contoh soal 4
Sebuah silinder pejal berjari-jari 20 cm dan bermassa 10 kg ditarik dengan sebuah tali yang dililitkan pada silider tersebut. Jika tali ditarik dari keadaan diam dengan gaya 30 N, tentukanlah a). Berapa percepatan linier dan percepatan sudut silinder ? b). Berapa laju silinder setelah menempuh jarak 32 m? c). Berapa jarak yang ditempuh silinder ketika lajunya 40 m/s?
Jawab :
a). Perhatikan Gambar (6-9)
• Gerak translasi
Σ F = m a F - f = m a
30 - f = 10 a ...(1)
• Gerak rotasi
Σ τ = I α
( F + f ) R =
2 1
mR2.
R a
( 30 + f ) =
2 1
. 10. a
( 30 + f ) = 5 a ...(2) Dari pers. (1) dan (2), diperoleh : a = 4 m/s2,
dan α =
R a
atau α = 8 rad/s2.
F v
f x Gambar (6-9)
b). Selanjutnya berlaku hubungan : v2 - vo2 = 2 a x,
v2 - 0 = 2. 4. 32, v = 16 m/s.
c). dengan menggunakan persamaan yang sama, v2 - vo2 = 2 a x,
402 - 0 = 2. 4. x, x = 200 m
Selanjutnya karena gaya F yang menyebabkan terjadinya dua macam gerak sekaligus, yakni gerak rotasi dan gerak translasi, maka usaha yang dilakukan oleh gaya F yang menyebabkan sebuah benda menggelinding, adalah jumlah dari usaha pada gerak rotasi (Wrot) dan usaha pada gerak translasi (Wtrns), jadi :
W = Wrot + Wtrns, atau W = τ θ + F. x.
Timbul pertanyaan, bagaimana kaitan antara usaha dan energi kinetik benda ? Sama halnya dengan kaitan antara usaha dan energi kinetik pada gerak translasi atau gerak rotasi, namun karena benda menggelinding, maka energi kinetik benda tersebut merupakan jumlah energi kinetik translasi dan energi kinetik rotasi, jadi :
Ek = 2 1
m v2 +
2 1
I ω2
99 Contoh soal 5
Dengan menggunakan prinsip energi, tunjukkan bahwa usaha yang dilakukan oleh gaya F pada contoh soal 4 di atas sama dengan perubahan energi kinetik silinder.
Jawab :
Bagaimana dengan gaya gesekan f, adakah pengaruhnya terhadap energi benda ? Gaya gesekan f adalah gaya gesekan statis yang bekerja pada titik singgung antara silinder dan lantai. Titik singgung ini tidak begerak relatif terhadap lantai, oleh sebab itu, gaya f tidak menambah atau mengurangi energi kinetik benda.
Apakah pada peristiwa mmenggelinding berlaku pula hukum kekekalan energi
mekanik ? Jawabannya adalah : Ya. Untuk lebih jelasnya kita lihat contoh soal berikut ini :
Contoh soal 6
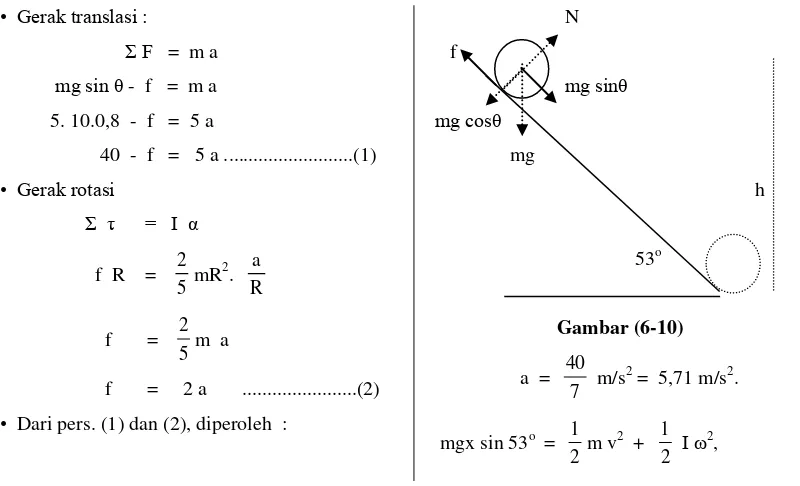
Sebuah bola pejal bermassa 5 kg menggelinding dari keadaan diam, dari puncak sebuah bidang miring yang sudut miringnya 53o, seperti diperlihatkan pada Gambar (6-9). Jika panjang bidang miring adalah 35 m, tentukanlah : a). Laju bola ketika sampai di kaki bidang miring, dengan menggunakan prinsip dinamika. b). Tunjukkan pula dengan menggunakan prinsip kekekalan energi.
100 a). Laju bola di kaki bidang miring diperoleh
dengan menggunakan persamaan : v2 - vo2 = 2 a x, ring, sama dengan energi kinetik bola di kaki bidang miring, jadi,
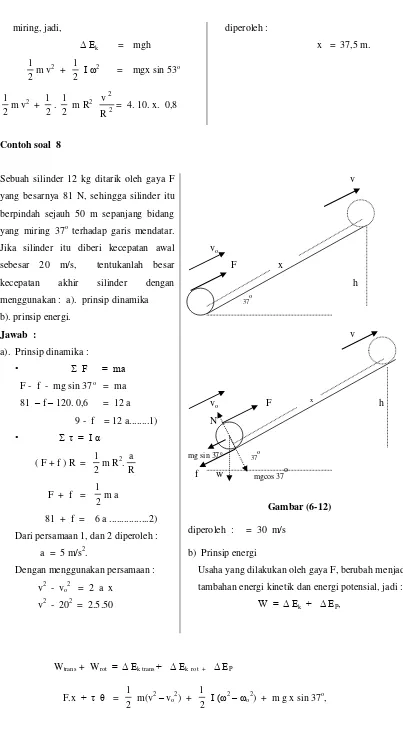
Sebuah silinder pejal massa 4 kg digelindingkan dari kaki sebuah bidang miring, yang sudut miringnya 53o, dengan kecepatan awal 20 m/s. sampai berapa jauh silinder ini bisa naik di bidang miring ?
Jawab : miring dapat ditentukan dengan mengguna- b). Energi kinetik bola di kaki bidang miring sama dengan,energi potansial bola di puncak bidang
101 kecepatan akhir silinder dengan menggunakan : a). prinsip dinamika b). prinsip energi. tambahan energi kinetik dan energi potensial, jadi :
102 F.x + F.R
R x
=
2 1
m(v2– vo 2
) +
2 1
.
2 1
mR2 ( 2
2
R v
– o22
R v
) + m g x sin 37o,
2 F.x =
4 3
m(v2– vo2) + m g x sin 37o,
2.81.50 = 4 3
.12 (v2– 202) + 12.10. 50. 0,6,
diperoleh besar kecepatan silinder, setelah menggelinding sejauh 50 m sepanjang bidang miring , yakni : v = 30 m/s.
J. Statika Benda Tegar
Sesuai dengan hukum Newton I, jika resultan gaya yang bekerja pada sebuah benda sama dengan nol, sebuah benda akan diam atau bergerak dengan kecepatan konstan. Sekarang, hukum ini dapat diperluas lagi menjadi : Jika resultan momen gaya yang bekerja pada sebuah benda sama dengan nol, maka benda akan diam atau bergerak
dengan kecepatan sudut konstan. dalam keadaan ini, secara umum benda dikatakan berada dalam keseimbangan mekanik. Khusus untuk benda yang sedang diam, dikatakan berada dalam keadaan setimbang statik.
Jika benda dianggap sebagai sebuah titik, maka sesuai dengan hukum Newton I, benda akan berada dalam keadaan seimbang statik atau diam, bila resultan gaya yang bekerja pada benda sama dengan nol. Jika benda tidak lagi bisa dianggap sebagai sebuah titik, pernyataan tersebut belumlah cukup, karena meskipun resultan gaya yang bekerja pada benda tersebut sama dengan nol, tidak menjamin benda akan diam, mungkin saja benda berotasi. Contohnya sebuah tongkat pada Gambar (6-13).
F
F
Gambar (6-13)
Meskipun resultan gaya yang bekerja pada tongkat sama dengan nol, benda tidaklah diam, tetapi akan berputar terhadap pusat massanya, karena momen gaya yang bekerja pada benda tersebut saling memperkuat, tidak saling meniada
kan. Oleh sebab itu, di samping resultan gaya harus nol, resultan momen gaya juga harus nol. Jadi, secara matematis, syarat terjadinya keseimbangan statik adalah :
1. Σ Fx = 0,
2. Σ Fy = 0, ………(6-17)
3. Σ τ = 0.
103 titik tangkap gaya gravitasi yang bekerja pada sebuah benda, jika massa benda itu terkumpul di pusat massa benda. Bagaimana menentukan titik berat benda ?
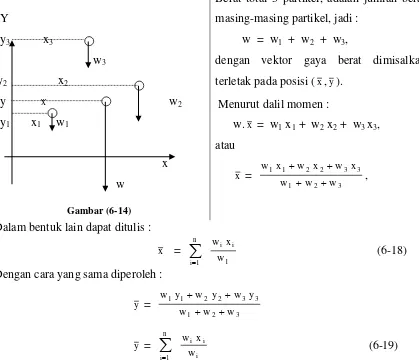
Titik berat sebuah benda dapat ditentukan berdasarkan dalil momen, yakni :
Resultan momen beberapa buah gaya, sama dengan momen resultan gaya-gaya
tersebut. Jika dalil momen tersebut diterapkan untuk menentukan titik berat 3 buah
dengan vektor gaya berat dimisalkan terletak pada posisi (x,y).
Dalam bentuk lain dapat ditulis :
x =
Dengan cara yang sama diperoleh :y =
Persamaan-persamaan di atas dapat dikembangkan sesuai kebutuhan, misalnya untuk menentukan pusat massa, dengan mengganti gaya berat w dengan massa m, atau menentukan titik berat benda yang luas bagian-bagiannya diketahui, dengan cara mengganti gaya berat w dengan luas A. Untuk benda-benda dengan distribusi partikel kontinu, tanda penjumlahan Σ diganti dengan tanda integral.
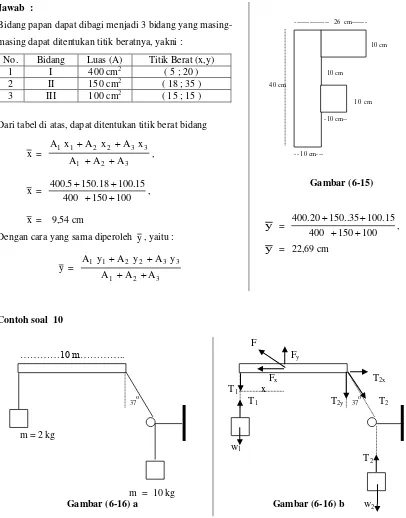
104 Contoh soal 9
Tentukan titik berat bidang papan berbentuk huruf F pada Gambar (6-15)
Jawab :
Bidang papan dapat dibagi menjadi 3 bidang yang masing-masing dapat ditentukan titik beratnya, yakni :
No. Bidang Luas (A) Titik Berat (x,y) 1 I 400 cm2 ( 5 ; 20 ) 2 II 150 cm2 ( 18 ; 35 ) 3 III 100 cm2 ( 15 ; 15 )
Dari tabel di atas, dapat ditentukan titik berat bidang
x =
Dengan cara yang sama diperoleh y , yaitu :
105 Jawab :
Pada Gambar (6-16) b, diperlihatkan gaya-gaya yang bekerja pada batang, yakni gaya T1 akibat w1 dan gaya T2 akibat w2, yang diuraikan menjadi komponen-komponennya. Misalkan gaya F yang dimaksud bekerja di titik yang berjarak x dari ujung kiri. Gaya F ini juga diuraikan atas komponen-komponennya, yakni Fx dan Fy. Selanjutnya digunakan syarat-syarat keseimbangan.
a). • Σ Fx = 0 T2x + Fx = 0
Fx = - 100. sin 37o Fx = - 60 N (ke kiri) • Σ Fy = 0
Fy - T1– T2y = 0 Fy - 20 – 100 cos 37 = 0
Fy = 100 N b). Misal sudut antara F dan batang adalah θ. tg θ =
x y
F F
tg θ =
60 100
= - 1.67
Sudut θ gaya F yang harus diberikan, dihitung
dari batang, berlawanan arah dengan putaran
jarum jam, (tg θ berharga negatif)
c). F = ( Fx2 + Fy2 )
F = ( 602 + 1002 ) F = 116.6 N
d). Στ = 0 ( terhadap titik tangkap F)
T2y. (10 – x) - T1. x = 0, 80. (10 – x) - 20. x = 0. Diperoleh : x = 8 m. Catatan : Momen gaya F terhadap titik
tangkapnya sama dengan nol. Contoh soal 11
Tangga yang panjangnya 5,0 m bersandar di dinding pada titik 4,0 m di atas lantai, seperti pada Gambar (6-17). Seorang tukang cat sedang beusaha menaiki tangga, dan ternyata tangga mulai tergelincir pada dasarnya, ketika ia berada 70 % dari panjang tangga. Jika massa tangga 12,0 kg, dan massa tukang cat 60 kg, berapa koefisien gesekan statis antara ujung bawah tangga dengan lantai ? Anggap tidak ada gesekan antara ujung atas tangga dengan dinding.
Jawab :
Pada gambar terlihat gaya-gaya yang bekerja pada tangga. Sesuai syarat keseimbangan :
• Σ Fx = 0, FG x - FW = 0,
FG x = FW, ……….1)
• Σ Fy = 0, FGy - mg - Mg = 0 FGy - 120 – 600 = 0
FGy = 720 N,………2)
• Σ τ = 0 Mg. 2,1 + mg. 1,5 = FW. 4, 600. 2,1 + 120. 1,5 = FW.4 FW = 360 ………..3) Dari persamaan 1, diperoleh :
FW
FGy 4,0 m
2,8 m
mg Mg
FGx 2,1 m
3,0 m
106 FGx = 360 N
Koefisien gesekan statis antara tangga dan lantai :
μ =
Gy Gx
F F
,
μ =
720 360
,
μ = 0,5
Contoh soal 12
Pusat gravitasi dari truk, yang membawa barang tergantung pada bagaimana barang-barang itu disusun. Jika tinggi truk 4,0 m, dan lebarnya 2,4 m, sedangkan pusat gravitasinya (PG) 2,2 m di atas tanah, seberapa jauh kemiringan bidang tempat truk itu diparkir tanpa terbalik ke samping .
Jawab :
Gaya- gaya N1 dan N2, adalah gaya normal yamg bekerja pada benda. Tepat pada saat truk akan terguling ke samping, besar gaya normal N2 adalah nol. Jika dihitung terhadap titik tumpu, yakni ban sebelah kiri, resultan momen gaya sama dengan nol, jadi :
Σ τ = 0
w cos θ. 1.2 - w sin θ. 2,2 = 0 diperoleh : tg θ = 0,545
atau θ = 28,6o .
Sudut θ adalah sudut kemiringan maksimum, agar
truk tidak terguling ketika diparkir.
PG w sin θ
N1 N2
P θ w cos θ
w
Gambar (6-18)
REFERENSI
P.A. Tipler. 1998. Fisika untuk sains dan teknik, Terjemahan, Erlangga. Jakarta.
H.D. Young dan R.A. Freedman, 2008. University Physics. 12th Edition. Addison Wesley.New York.