KATA PENGANTAR
Seminar Nasional Informatika (SNIf) merupakan salah satu agenda kegiatan rutin tahunan STMIK
Potensi Utama sebagai forum yang mempertemukan Akademisi, Peneliti, Praktisi dan Pengambil
Kebijakan dibidang informatika guna penyebaran Ilmu pengetahuan dan Teknologi terkini. Kumpulan
makalah dikemas dalam bentuk prosiding dan dikelompokkan sesuai dengan bidang kajian antara lain
Computer Science, Artificial Intelligence, Image Processing, Computer Networking end Security,
Multimedia, Wirelles Computing, Interfacing, Information System, dan
Software Engineering.
Makalah yang diterima berasal dari seluruh Indonesia, makalah yang dimuat dalam Prosiding SNIf
2013 telah melalui tahap evaluasi oleh para reviewer yang berkompeten dibidangnya. Panitia
mengucapkan selamat serta terima kasih atas keikutsertaan dalam Seminar Nasional Informatika
(SNIf) 2013. Panitia juga mengucapkan terima kasih kepada Pemerintah Daerah Sumatera Utara dan
semua pihak yang telah mendukung serta berpartisipasi aktif dalam mensukseskan acara Seminar
Nasional ini. Saran dan Kritikan demi menuju kesempurnaan prosiding SNIf sangat diharapkan.
Semoga prosiding ini dapat digunakan sebagai salah satu acuan dalam pengembangan teknologi dan
peningkatan pembelajaran dibidang Informatika.
Medan, September 2013
Ketua Panitia
KOMITE PROGRAM
Kridanto Surendro, Ph.D (Institut Teknologi Bandung) Dr. Rila Mandala (Institut Teknologi Bandung)
Dr. Husni Setiawan Sastramihardja (Institut Teknologi Bandung) Retantyo Wardoyo, Ph.D (Universitas Gadjah Mada) Prof. Dr. Jazi Eko Istiyanto (Universitas Gajah Mada)
Agus Harjoko, Ph.D (Universitas Gadjah Mada) Sri Hartati, Ph.D (Universitas Gadjah Mada) Dr. Edi Winarko (Universitas Gadjah Mada) Dr. Djoko Soetarno (Universitas Bina Nusantara) Prof. Dr. M. Yusoff Mashor (Universiti Malaysia Perlis)
Prof. Ahmad Benny Mutiara (Universitas Gunadarma) Prof. Dr. M.Zarlis (Universitas Sumatera Utara) Prof. Dr. Opim Salim Sitompul (Universitas Sumatera Utara)
Dr. Zainal A Hasibuan (Universitas Indonesia)
TIM EDITORIAL
PENANGGUNG JAWAB
Rika Rosnelly, SH, M.Kom (STMIK Potensi Utama)
KETUA PENYUNTING
Khairul Ummi, M.Kom (STMIK Potensi Utama)
WAKIL KETUA PENYUNTING
Ratih Puspasari. M.Kom (STMIK Potensi Utama)
PENYUNTING PELAKSANA
Budi Triandi, M.Kom (STMIK Potensi Utama) Lili Tanti, M.Kom (STMIK Potensi Utama) Linda Wahyuni, M.Kom (STMIK Potensi Utama) Yudhi Andrian, S.Si, M.Kom (STMIK Potensi Utama) Edy Victor Haryanto S. M.Kom (STMIK Potensi Utama) Mas Ayoe Elhias Nasution, M.Kom (STMIK Potensi Utama)
Helmi Kurniawan, ST, M.Kom (STMIK Potensi Utama) Rahmadani Pane, M.Kom (STMIK Potensi Utama Evri Ekadiansyah, M.Kom (STMIK Potensi Utama) Muhammad Rusdi Tanjung, S.Kom, M.Ds (STMIK Potensi Utama)
Fithri Mayasari, S.Kom (STMIK Potensi Utama) Wiwi Verina, S.Kom (STMIK Potensi Utama) Fitriana Harahap, S.Kom (STMIK Potensi Utama)
Ria Ekasari, S.Kom (STMIK Potensi Utama) Rofiqoh Dewi, S.Kom (STMIK Potensi Utama)
ALAMAT REDAKSI
Sekolah Tinggi Manajemen Informatika dan Komputer (STMIK) Potensi Utama Medan Jl. K.L.Yos Sudarso Km.6,5 No.3-A Medan (20241)
Telp (061) 6640525 Fax (061) 6636830
Email : [email protected] dan [email protected]
PENERBIT
DAFTAR ISI
Halaman 1. APLIKASI PUSAT PANGGILAN TINDAKAN KRIMINAL DI KOTA MEDAN
BERBASIS ANDROID
Zuliana, Muhammad Irwan Padli Nasution 1
2. CONTROL SYSTEM DESIGN WITH SWARM MODEL FORMAKING FLOCKING ON UNMANNED SMALL SCALE HELICOPTER
Albert Sagala 8
3. SIMULASI VENDING MACHINE SOFT DRINK DENGAN MENGGUNAKAN METODE FINITE STATE MACHINE AUTOMATA
Elida Tuti Siregar 18
4. REVIEW METODE KLASIFIKASI KENDARAAN DARI DATA VIDEO LALU LINTAS
Imelda, Agus Harjoko 22
5. JARINGAN SYARAF TIRUAN BACKPROPAGATION UNTUK MENDIAGNOSA AUTISM SPECTRUM DISORDER (ASD)
Fhitriani Matondang 31
6. REVIEW METODE DATA MINING UNTUK MENDETEKSI WABAH PENYAKIT FHITRIANI MATONDANG
Deni Mahdiana, Edi Winarko 36
7. PERANCANGAN APLIKASI GAME ULAR
Hardianto 43
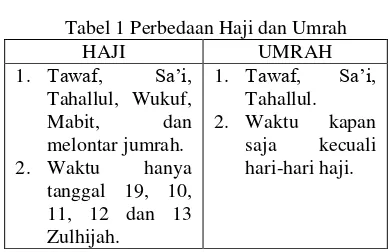
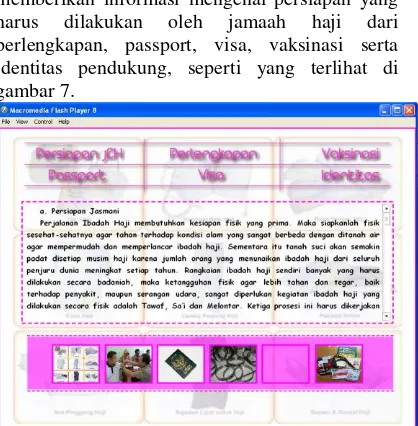
8. IMPLEMENTASI APLIKASI TUNTUNAN IBADAH HAJI BERBASIS ANIMASI
Evri Ekadiansyah 46
9. ANT COLONY OPTIMIZATION UNTUK CLUSTERING DOKUMEN HASIL PENCARIAN
David 54
10. SELEKSI MAHASISWA PRESTASI MENGGUNAKAN FUZZY-TOPSIS
Ira Safitri Abnur,Dedy Hartama, Syaifullah 60
11. PERANCANGAN PERANGKAT LUNAK PERMAINAN STRATEGI BATTLE SHIP PADA JARINGAN
Deni Adhar 66
12. ANALISIS PERANGKAT LUNAK PENJADWALAN KULIAH MENGGUNAKAN ALGORITMA ANT
Genrawan Hoendarto, Hoga Saragih dan Bobby Reza 71
13. PENERAPAN ALGORITMA LINEAR DISCRIMINANT ANALYSIS (LDA) UNTUK PENGENALAN WAJAH SEBAGAI PEMANTAU KEHADIRAN KARYAWAN
Riyadi J. Iskandar 81
14. ANALISIS KRIPTOGRAFI DENGAN METODE HILL CIPHER
Nurhayati 88
15. KOMPARASI KONVERGENSI SINGLE POPULATION DENGAN TWO POPULATION GENETIC ALGORITHM
16. SISTEM INFORMASI TARIF ANGKOT DI KOTA MEDAN DENGAN MENGGUNAKAN METODE ANALITYCAL HICRARCHY PROCESS
Labuan Nababan 96
17. INTERFACE BAHASA ALAMI UNTUK QUERY BASIS DATA RELASIONAL : APLIKASI PADA BASIS DATA MEDIS
Rusdah, Sri Hartati 104
18. PERANCANGAN SISTEM PAKAR DIAGNOSA PENYAKIT KANKER RAHIM
Adil Setiawan 109
19. SISTEM PINTAR SEBAGAI MEDIA BANTU PEMBELAJARAN MEMBACA HURUF DAN ANGKA PADA ANAK PENYANDANG TUNA NETRA
Dadang Priyanto, Muhamad Nur 114
20. PENERAPAN ALGORITMA VERNAM CHIPER DALAM PROSES ENKRIPKSI
Mikha Dayan Sinaga 120
21. RANCANGAN SISTEM INFORMASI PENGISIAN FRS SECARA ONLINE PADA STMIK NURDIN HAMZAH
Elzas, Lucy Simorangkir, Joni 123
22. PENGGUNAAN METODE DECISION TREE PADA PEMBERIAN BONUS BERDASARKAN KINERJA KARYAWAN
Nita Syahputri 128
23. METODE-METODE PENYELESAIAN NAMED ENTITY RECOGNITION
Sigit Priyanta, Sri hartati 134
24. SISTEM PENDUKUNG KEPUTUSAN SELEKSI PENERIMAAN BEASISWA MENGGUNAKAN METODE FUZZY SAW (STUDI KASUS : STMIK POTENSI UTAMA)
Rofiqoh Dewi
140
25. SISTEM INFORMASI PENANGANAN KLAIM PESERTA PT. ASKES PADA CABANG JAMBI
Lucy Simorangkir, Elzas, Siti Herlina 144
26. IMPLEMENTASI KRIPTOGRAFI CAESAR CHIPER DALAM PROSES PENYIMPANAN DATA KE DALAM DATABASE
Nita Sari BR. Sembiring 150
27. SISTEM PENDUKUNG KEPUTUSAN PENERIMA BANTUAN DANA UNIT KEGIATAN MAHASISWA (UKM) STMIK NURDIN HAMZAH JAMBI
Novhirtamely Kahar, Evi Ariyagi Sitompul 153
28. IDENTIFIKASI AREA TUMOR PADA CITRA CT-SCAN TUMOR OTAK MENGGUNAKAN METODE EM-GMM
Lestari Handayani , Muhammad Safrizal, Rohani 159
29. SISTEM INFORMASI GEOGRAFIS LOKASI TRANSMISI TVRI DI SUMATERA UTARA BERBASIS WEB
Hamidah Handayani 165
30. MOBILE SEARCHING OBYEK WISATA PEKANBARU MENGGUNAKAN LOCATION BASE SERVICE (LBS) BERBASIS ANDROID
Sugeng Purwantoro E.S.G.S, Heni Rachmawati, Achmad Tharmizi 169 31. PERANCANGAN SISTEM PENUNJANG KEPUTUSAN PEMBERIAN SERTIFIKASI
32. DESAIN KLASIFIKASI DETEKSI SUARA NON–VERBAL BERBASIS WSN PADA APLIKASI SISTEM SMART HOME
Eko Polosoro, Edi Winarko 181
33. SISTEM PAKAR UNTUK MENDETEKSI PENYAKIT THT DENGAN MENGGUNAKAN FORWARD CHAINING
Ria Eka Sari 188
34. SISTEM PAKAR MENENTUKAN GANGGUAN PSIKOLOGI KLINIS MENGGUNAKAN FORWARD CHAINING DAN FORMULA BAYES
Wawan Nurmansyah, Sri Hartati 191
35. SISTEM PAKAR UNTUK MENDIAGNOSA PENYAKIT KANKER TULANG
Linda Wahyuni 197
36. TEKNIK K-FOLDCROSS VALIDATIONUNTUK PENDETEKSIAN KESALAHAN PERANGKAT LUNAK
Arwin Halim 202
37. SISTEM PENGAMBILAN KEPUTUSAN KENAIKAN JABATAN DENGAN METODE PROFILE MATCHING MODELING
Helmi Kurniawan, Muhammad Rusdi Tanjung 207
38. PENENTUAN KESEHATAN LANSIA BERDASARKAN MULTI VARIABEL DENGAN ALGORITMA K-NNPADA RUMAH CERDAS
Mardi Hardjianto, Edi Winarko 214
39. SISTEM PENUNJANG KEPUTUSAN SELEKSI SISWA BARU (AIRLINES STAFF) DENGAN METODE AHP PADA LEMBAGA PENDIDIKAN PELATIHAN
PENERBANGAN QLTC Syafrizal
219
40. RANCANG BANGUN APLIKASI E-LEARNING DENGAN STRATEGI RAPID APPLICATION DEVELOPMENT : STUDI KASUS SMA XYZ
Roni Yunis, Aulia Essra, Dewi Amelia 226
41. SISTEM PAKAR MENDETEKSI KERUSAKAN SOUND EFFECT PADA GITAR ELEKTRIK
Muhammad Fauzi 233
42. SISTEM PAKAR TES PSIKOMETRI KEPRIBADIAN MANUSIA MENGGUNAKAN METODE FORWARD CHAINING
Sandy Kosasi 236
43. PENERAPAN STRATEGI GREEDY HEURISTIK & KNAPSACK UNTUK OPTIMASI WAKTU PELAYANAN BIMBINGAN SKRIPSI
Heri Gunawan 242
44. ALGORITMA C 4.5 UNTUK KLASIFIKASI POLA PEMBAYARAN KREDIT MOTOR PADA PERUSAHAAN PEMBIAYAAN (LEASING)
Fitri Nuraeni, Rahadi Deli Saputra, Neneng Sri Uryani 245
45. SISTEM TEMU KEMBALI GAMBAR BERDASARKAN EKSTRAKSI CIRI BENTUK DENGAN METODE HOUGH TRANSFORM
Lestari Handayani, Muhammad Safrizal, Mhd. Ridho Muslim 251
46. PERANCANGAN APLIKASI GAME ANAK MENCOCOKKAN GAMBAR DENGAN METODE DIVIDEN AND CONGUER
47. SURVEY METODE VERIFIKASI SISTEM-SISTEM TERTANAM
Suprapto, Sri Hartati 261
48. PERBANDINGAN METODE LSB, LSB+1, DAN MSB PADA STEGANOGRAFI CITRA DIGITAL
Yudhi Andrian 267
49. SISTEM PENUNJANG KEPUTUSAN PEMBERIAN KENAIKAN LEVEL PADA KARYAWAN PERUSAHAAN
Adnan Buyung Nasution 273
50. SISTEM PENDUKUNG KEPUTUSAN PEMBELIAN MOTOR MATIC DENGAN FUZZY MULTI CRITERIA DECISION MAKING (FMCDM)
Hambali Furnawan, Sukma Puspitorini, Islamiya 276
51. PERANCANGAN SISTEM INFORMASI PENERIMAAN PEGAWAI PADA STMIK POTENSI UTAMA
Asbon Hendra 280
52. SISTEM PENDUKUNG KEPUTUSAN SPASIAL MULTIKRITERIA MENGGUNAKAN METODE PROMETHEE-GAIA UNTUK SISTEM SURVEILANS RESPON DEMAM BERDARAH DENGUE
Sigit Priyanta, Irkham Huda
285
53. PERANCANGAN SISTEM INFORMASI PRESENSI PRAKTIKUM MAHASISWA MENGGUNAKAN BARCODE DI LABORATORIUM KOMPUTER STMIK TASIKMALAYA
Teuku Mufizar, Rahadi Deli Saputra, Triana Agustin
291
54. PENERAPAN ALGORITMA BASE 64 DALAM PESAN
Frinto Tambunan 300
55. APLIKASI PUBLIKASI HASIL PENELITIAN DOSEN DENGAN GOOGLE APP ENGINE
Sukiman, Hendra 303
56. METODE DAN ALGORITMA HAND GESTURE UNTUK APLIKASI AUGMENTED REALITY
Andi Sunyoto, Agfianto Eko Putra 308
57. PERANCANGAN SISTEM PAKAR DIAGNOSA PENYAKIT PADA MATA
Erianto Ongko 313
58. SIMULASI SISTEM ANTRIAN PENGAMBILAN DANA PENSIUN DENGAN METODE MULTIPLE CHANNEL SINGLE PHASE
Dahriani Hakim Tanjung 320
59. APLIKASI SISTEM PAKAR DIAGNOSIS PMS BERBASIS WEB DENGAN METODE FORWARD CHAINING
Hartono 323
60. IMPLEMENTASI ALGORITMA KRIPTOGRAFI RIJNDAEL UNTUK KEAMANAN ISI BERKAS DIGITAL
Ikbal Jamaludin, Rahadi Deli Saputra, Deden Rizki 329
61. APLIKASI SISTEM PAKAR UNTUK SIMULASI PENENTUAN ARUS DALAM RANGKAIAN LISTRIK TERTUTUP
62. PENGAMANAN KENDARAAN BERMOTOR RODA DUA MENGGUNAKAN SMARTPHONE ANDROID
Iwan Fitrianto Rahmad, Vidi Agung Fragastia 342
63. APLIKASI E-COMMERCE PADA SYSTECH COMPUTER JAMBI
Reny Wahyuning Astuti, Pariyadi 348
64. PERANCANGAN KEAMANAN WEB DATABASE DENGAN METODE RAJNDAEL
Ahir Yugo Nugroho 353
65. PERANGKAT LUNAK KAMUS ELEKTRONIK MENGGUNAKAN METODE BREADTH FITST SEARCH
APLIKASI PUSAT PANGGILAN TINDAKAN KRIMINAL
DI KOTA MEDAN BERBASIS ANDROID
Zuliana1, Muhammad Irwan Padli Nasution2 1 Sistem Informasi STT- Harapan Medan
2 IAIN Sumatera Utara Medan
1[email protected], 2[email protected]
ABSTRAK
Perkembangan dan pemanfaatan Teknologi Informasi dan Komunikasi telah membawa perubahan yang sangat signifikan dalam budaya dan perilaku masyarakat. Seiring dengan itu berbagai fitur baru juga ditemukan untuk melengkapi fasilitas penggunaaan telepon seluler. Berkembangnya teknologi telepon seluler telah menjadi sebuah smartphone yang dapat dilengkapi dengan berbagai aplikasi. Sejak dipasarkannya android pada tahun 2007 telah membawa pengaruh yang signifikan dalam pengembangan aplikasi pada smartphone. Pemasaran smartphone berbasis android lebih murah karena berlisensi terbuka sehingga dalam pengembangannya akan lebih bebas untuk dilaksanakan. Berbagai aplikasi berbasis android dapat dengan mudah dikembangkan untuk berbagai keper luan. Demikian halnya dapat dikembangkan sebuah aplikasi pusat panggilan tindakan kriminal otomatis berbasis android yang bermanfaat sebagai bentuk layanan kepada masyarakat untuk mempermudah masyarakat dalam melaporkan kepada pihak kepolisian ketika mengalami berbagai tindakan kriminal.
Kata Kunci : Android, Kriminal, Pusat Panggilan
1. Pendahuluan
Dari media cetak maupun elektronik untuk saat kini seringkali terdengar terjadinya berbagai tindakan kriminalitas yang menyebabkan masyarakat merasa takut dan tidak nyaman. Kejahatan dan tindakan kriminalitas telah menjadi masalah sosial yang serius dan tersendiri bagi hampir seluruh tatanan masyarakat dunia, terlebih lagi pada saat sekarang ini semakin maraknya kasus-kasus kriminalitas yang terjadi dimana pelakunya dapat saja dari semua kalangan usia, dari anak kecil, muda, hingga dewasa dapat melakukan berbagai tindakan kriminal.
Berbagai pencegahan dan perlindungan kepada masyarakat terus dilakukan pemerintah. Di pihak Kepolisian Republik Indonesia telah disediakan berbagai nomor kontak telepon sebagai pusat panggilan (call center) untuk menerima berbagai pengaduan dari masyarakat.
Nomor telepon tersebut berada di Polsek, sehingga masyarakat direkomendasikan untuk menghubungi nomer kontak telepon yang terdekat lokasinya dengan posisinya saat itu. Hal ini dibutuhkan agar supaya pihak kepolisian dapat dengan cepat bertindak menuju ke lokasi perkara. Akan tetapi kelemahan dari sistem manual ini adalah setiap masyarakat harus mengetahui dengan tepat dan benar nomer kontak telepon pada Polsek tersebut.
Seiring dengan penjualan perangkat telepon seluler (handphone) semakin murah dan mudah
didapatkan. Alat ini saat ini sudah menjadi kebutuhan masyarakat modern saat ini. Dengan demikian alat ini dapat digunakan untuk membantu masyarakat dalam mengadukan tindakan kriminal yang terjadi di sekitar lingkungan tempat dimana dia berada.
Teknologi pada handphone khususnya smartphone berbasis Android, banyak menyediakan fasilitas-fasilitas yang dapat dimanfaatkan untuk menciptakan suatu aplikasi secara bebas (free platform) dan terbuka (open source).
Dengan menggunakan software eclipse dapat dikembangkan sebuah Aplikasi Pusat Pangilan Tindakan Kriminal di Kota Medan Berbasis Android. Dengan menggunakan aplikasi ini masyarakat akan dapat tersambung secara otomatis dengan nomor kontak telepon di Polsek yang terdekat dari posisinya berada saat itu. Lebih lanjut aplikasi ini nantinya dapat dikembangkan, tentunya bukan hanya untuk disatu lokasi atau kota saja, akan tetapi untuk seluruh daerah di Indonesia.
1.1 Batasan Masalah
Pada penelitian ini dilakukan beberapa batasan masalah seperti berikut:
Kepolisian (Polsek) di bawah naungan Polresta Medan.
2. Aplikasi merekomendasikan kepada user dimana nomor kontak panggian kantor kepolisian (Polsek) yang terdekat dengan posisinya saat ini. 3. Digunakan aplikasi mobile Eclipse
Juno, Adobe photoshop Css dan beberapa perangkat lunak lainnya yang menunjang pembuatan aplikasi pusat panggilan ini.
4. Aplikasi Pusat Panggilan ini di banggun menggunakan Android versi 4.2 (Jelly Bean).
5. Penggunaan aplikasi Pusat Panggilan ini dioperasikan pada handphone berbasis Android.
6. Ketika aplikasi pusat panggilan yang dioperasikan harus terkoneksi dengan jaringan internet, berguna untuk melihat lokasi/posisi user saat itu 2. Teknologi Berbasis Android
Android adalah sebuah sistem operasi untuk perangkat mobile berbasis linux yang mencakup sistem operasi, middleware dan aplikasi. Android menyediakan platform terbuka bagi para pengembang untuk menciptakan aplikasi mereka. Awalnya, Google Inc. membeli Android Inc. yang merupakan pendatang baru yang membuat peranti lunak untuk ponsel/smartphone, kemudian mengembangkan Android dibentuk Open Handset Alliance, konsorsium dari 34 perusahaan peranti keras, peranti lunak, dan telkomunikasi, termasuk Google, HTC, Intel, Motorola, Qualcomm, T-Mobile, dan Nvidia. [1]
Terdapat dua jenis distributor sistem operasi Android yang pertama adalah yang mendapat dukungan penuh dari Google atau Google Mail Services (GMS) dan kedua adalah yang bebar-benar bebas distribusinya tanpa dukungan langsung Google atau dikenal sebagai Open Handset Distribution (OHD). Android dipuji
sebagai “platform mobile pertama yang lengkap, terbuka, dan bebas “.
a. Lengkap (complete Platfrom) : para disainer dapat melakukan pendekatan yang komprehensif ketika mereka sedang mengembangkan platform Android. Android merupakan sistem operasi yang aman dan banyak menyediakan tools dalam membangaun software dan memungkinkan untuk peluang pengembangan aplikasi.
b. Terbuka (Open Source Platfrom) : Platfrom Android disediakan melalui
lisensi open source. Pengembangan dapat dengan bebas untuk mengembangkan aplikasi. Android sendiri menggunakan Linux kernel 2.6.
c. Free (Free Platfrom): Android adalah platform/aplikasi yang bebas untuk develop. Tidak ada lisensi atau biaya royalty untuk dikembangkan pada platform Android. Tidak ada biaya keanggotaan diperlukan. Tidak diperlukan biaya pengujian. Tidak ada kontrak yang diperlukan. Aplikasi android dapat di distribusikan dan diperdagangkan dalam bentuk apapun. Software android sebagai platform yang lengkap, terbuka, bebas (free) dan informasi lainnya dapat diunduh secara bebas dan lengkap
dengan mengunjungi website
http://developer.android.com
Telepon seluler pertama yang menggunakan sistem operasi Android adalah HTC dream, yang dirilis pada 22 Oktober 2008. Pada penghujung tahun 2010 diperkirakan hampir semua vendor seluler di dunia menggunakan android sebagai operating system. Adapun versi-versi android yang pernah dirilis adalah sebagai berikut: [3]
1. Android versi 1.1
Pada 9 Maret 2009, Google merilis Android versi 1.1. Android versi ini dilengkapi dengan pembaruan estesis pada aplikasi, jam, alarm, voice search (pencarian suara), pengiriman pesan Gmail, dan pemberitahuan email.
2. Android versi 1.5 (Cupcake)
3. Android versi 1.6 (Donut)
Donut (versi 1.6) dirilis pada September dengan menampilkan proses pencarian yang lebih baik dibandingkan sebelumnya, penggunaan baterai indicator dan control applet VPN. Fitur lainnya adalah galeri yang memungkinankan pengguna untuk memilih foto yang akan dihapus; kamera, camcorder dan galeri yang dintegrasikan, CDM/EVDO, 802.1x, VPN, Gestures, dan Text-to-speech engine, kemampuan dial kontak, teknologi text to change speech engine (tidak tersedia pada semua ponsel, pengadaan resolusi VWGA. 4. Android versi 2.0/2.1 (Éclair)
Pada 3 Desember 2009 kembali diluncurkan ponsel Android dengan versi 2.0/2.1 (Éclair), perubahan yang dilakukan adalah pengoptimalan hardware, peningkatan Google Maps 3.1.2, perubahan UI dengan browser baru dan dukungan HTML5, daftar kontak yang baru, dukungan flash untuk kamera 3,2 MP, digital Zoom, dan Bluetooth 2.1. 5. Android versi 2.2 (Froyo: Frozen
Yoghurt)
Pada bulan mei 2010 Android versi 2.2 Rev 1 diluncurkan. Android inilah yang sekarang sangat bnyak beredar dipasaran, salah satunya adalah dipakai di Samsung FX tab yang sudah ada di pasaran. Fitur yang tersedia di Android versi ini sudah kompleks di antara lainnya adalah : a) Kerangka aplikasi memungkinkan
pengguna dan penghapusan komponen yang tersedia.
b) Dalvik Virtual Machine dioptimalkan un tuk perangkat mobile
c) Grafik: grafik 2D dan grafis 3D berdasarkan libraries OpenGL d) SQLite: untuk penyimpanan data. e) Mendukung madia: audio, video,
danberbagai format gambaran (MPEG4, H.264, MP3,ACC, AMR, JPG, PNG, GIF)
f) GSM, Bluetooth, EDGE, 3G, dan WiFi (hardware independent) g) Kamera, Global positioning system
(GPS), kompas, dan accelerometer ( teragantung hardware).
6. Android versi 2.3 (Gingerbread)
Android versi 2.3 diluncurkan pada Desember 2010, hal-hal yang direvisi dari versi sebelumnya adalah kemampuan seperti berikut:
a) SIP-based VoIP
b) Near faild Communicatiions (NFC)
c) Multiple cameras support d) Mixable audio effects e) Download manager 7. Android versi 3.0/3.1 (Honeycomb)
Android Honeycomb dirancang khusus untuk tablet. Android versi ini mendukung ukuran layar yang lebih besar. User Interface pada Honeycomb juga berbeda karena sudah didesain untuk tablet. Honeycomb juga mendukung multi prosesor dan juga akselerasi perangkat keras (hardware) untuk grafis. Tablet pertama yang dibuat dengan
menjalankan Honeycomb
adalah Motorola Xoom. Perangkat tablet dengan platform Android 3.0 akan segera hadir di Indonesia. Perangkat tersebut bernama Eee Pad Transformer produksi dari Asus. Rencana masuk pasar Indonesia pada Mei 2011.
8. Android versi 4.0 (ICS: Ice Cream Sandwich)
Diumumkan pada tanggal 19 Oktober 2011, membawa fitur Honeycomb untuk smartphone dan menambahkan fitur baru termasuk membuka kunci dengan pengenalan wajah, jaringan data pemantauan penggunaan dan kontrol, terpadu kontak jaringan sosial, perangkat tambahan fotografi, mencari email secara offline, dan berbagi informasi dengan menggunakan NFC. Ponsel pertama yang menggunakan sistem operasi ini adalah Samsung Galaxy Nexus.
9. Android versi 4.1 (Jelly Bean)
ataupun hasil pertandingan olahraga. Sistem operasi Android Jelly Bean 4.1 muncul pertama kali dalam produk tablet Asus, yakni Google Nexus 7.
10. Android versi 4.2 (Jelly Bean)
Fitur photo sphere untuk panaroma, daydream sebagai screensaver, power control, lock screen widget, menjalankan banyak user (dalam tablet saja), widget terbaru. Android 4.2 Pertama kali dikenalkan melalui LG Google Nexus 4. Android versi 3.0 ke atas adalah generasi platform yang digunakan untuk tablet pc. Untuk informasi detail dan atau untuk mendapatkan informasi terbaru tentang berbagai aplikasi android dapat di lihat pada website resmi http://www.android.com
2.1 Eclipse
Dalam pengembangan aplikasi Android biasanya para pengembang (developer Android) menggunakan Eclipse sebagai Integrated Development Environment (IDE). IDE merupakan program komputer yang memiliki beberapa fasilitas yang diperlukan dalam pembangunan perangkat lunak. Eclipse tersedia secara bebas untuk merancang dan mengembangkan aplikasi Android. Eclipse merupakan IDE terpopuler dikalangan developer Android, karena Eclipse memiliki Android plug-in lengkap yang tersedia untuk mengembangakn aplikasi Android. Selain itu, Eclipse juga mendapat dukungan langsung dari Google untuk menjadi IDE pengembangan Android, membuat project Android di mana source software langsung dari situs resminya Google. Selain Eclipse dapat pula menggunakan IDE Nebeans untuk pengembangan aplikasi Android.
Sampai saat kini Eclipse telah memiliki versi package, yaitu: Indigo Package, Helios Package, Galileo Package, Ganymade Package, dan Europa Package. Versi terbaru Eclipse Kepler 4.3 dan versi sebelumnya untuk berbagai sistem operasi berbeda dapat di download secara gratis dan lengkap pada situs resmi Eclipse yaitu http://www.eclipse.org [6]
2.2 GPS (Global Positioning System)
GPS adalah suatu sistem navigasi satelit yang dikembangkan oleh Departemen Pertahanan Amerika Serikat, US DoD (United States Department of Defense). GPS memungkinkan pengguna untuk melihat dimana posisi geografis (lintang, bujur, dan ketinggian di atas permukaan laut) di muka bumi. Jadi dengan teknologi GPS, dapat mengetahui dimana posisi pengguna berada.
Satelit GPS berputar mengelilingi bumi selama 24 jam sehari di dalam orbit yang akurat dengan tingkat kecermatan sampai nanosecond
3. Radio transmitter : untuk mengirim sinyal ke bumi.
GPS reciever mengambil informasi dengan menggunakan perhitungan “triangulation”
menghitung lokasi user dengan tepat. GPS reciever membandingkan waktu sinyal di kiirim dengan waktu sinyal tersebut di terima. Dari informasi itu didapat diketahui berapa jarak satelit. Dengan perhitungan jarak GPS reciever dapat melakukan perhitungan dan menentukan posisi user dan menampilkan dalam peta elektronik. 3. Kepolisian Republik Indonesia
Polisi merupakan suatu pranata umum sipil yang mengatur tata tertib dan hukum. Polisi secara universal mencakup fungsi dan organ yang mencakup lembaga resmi yang diberi mandat untuk memelihara ketertiban umum, perlindungan orang serta segala sesuatu yang dimilikinya dari keadaan bahaya atau gangguan umum serta tindakan-tindakan melanggar hukum. Berdasarkan Undang-Undang Tentang Kepolisian Negara Republik Indonesia, fungsi Kepolisian terdapat pada pasal 2 no.2 tahun 2002 menyebutkan bahwa fungsi kepolisian adalah salah satu fungsi pemerintahan negara di bidang pemeliharaan keamanan dan ketertiban masyarakat, penegakan hukum, perlindungan, pengayoman, dan pelayanan kepada masyarakat. Sementara itu pada pasal 4 no.2 tahun 2002 tentang tujuan Kepolisian Republik Indonesia bertujuan untuk mewujudkan keamanan dalam negeri yang meliputi terpeliharanya keamanan dan ketertiban masyarakat, tertib dan tegaknya hukum, terselenggaranya perlindungan, pengayoman, dan pelayanan kepada masyarakat, serta terbinanya ketentraman masyarakat dengan menjunjung tinggi hak asasi manusia, sehingga terlihat jelas fungsi dan tujuan kepolisian yaitu memelihara keamanan dan ketertiban masyarakat serta melayani masyarakat. [4]
3.1 Kriminal
masyarakat. Sehingga tidak heran angka kriminalitas meningkat lantaran beratnya beban hidup yang ditanggung. [5]
Tindak kriminal adalah segala sesuatu yang melanggar hukum atau sebuah tindakan kejahatan. Pelaku kriminalitas disebut seorang kriminal. Biasanya yang dianggap kriminal adalah seorang pencuri, pembunuh, perampok, atau teroris. Walaupun begitu kategori terakhir, teroris, agak berbeda dari kriminal karena melakukan tindak kejahatannya berdasarkan motif politik. Dalam mendefinisikan kejahatan, ada beberapa pandangan mengenai perbuatan apakah yang dapat dikatakan sebagai kejahatan. [7]
Seperti yang diketahui bahwa kriminalitas atau kejahatan itu bukan merupakan peristiwa herediter (bawaan sejak lahir, warisan) juga bukan merupkan warisan biologis. Tingkahlaku kriminal itu bisa dilakukan oleh siapapun juga dengan berbagai faktor pendorongnya. Tindak kejahatan dapat dilakukan secara sadar yaitu dipikirkan, direncanakan dan diarahkan pada maksud dan tujuan tertentu. Namun, dapat juga dilakukan secara setengah sadar misalnya, didorong oleh implus-implus yang hebat, didera oleh dorongan-dorongan paksaan yang sangat kuat dan oleh obesesi-obesesi. Ada beberapa faktor pendorong yang menyebabkan sesorang melakukan tindakan kriminalitas, diantaranya yaitu :
a. Individual (antropologis) yang meliputi: usia, seks atau jenis kelamin, status sipil, profesi atau pekerjaan, tempat tinggal/domisili, tingkat sosial, pendidikan, konstitusi organis dan psikis.
b. Fisik (natural,alam): ras, suku, iklim, fertilitas, disposisi bumi, keadaan alam, musim, kondisi meteorik, kelembaban udara dan suhu.
c. Sosial, antara lain: kepadatan penduduk, susunan masyarakat, adat-istiadat, agama, orde pemerintah, kondisi ekonomi dan industri, pendidikan, jaminan sosial, lembaga legislatif, dan lembaga hukum, dan lain-lain.
4. Pengembangan Aplikasi
Dalam proses pengembangan aplikasi ini dibagi atas 4 tahapan pekerjaan seperti yang terlihat pada Gambar 1 berikut:
Identifikasi
Analisis dan Perancangan Project
Implemintasi Desain
Gambar 1. Tahapan Pembuatan Aplikasi Pada tahapan awal dilakukan identifikasi masalah yang ada dan solusi untuk permasalahan yang telah diidentifikasi. Setelah itu dilakukan inisialisasi berupa identifikasi stake holder sistem yang akan dikembangkan. Stake holder yang terkait dengan pengembangan sistem ini yaitu: masyarakat dan supporting end user yaitu pihak kepolisian. Setelah stake holder diketahui dilakukan tracking untuk mengumpulkan informasi-informasi dan data yang dibutuhkan untuk pengembangan sistem. Dari tahapan ini dilakukan perencanaan dalam pengembangan sistem yang melahirkan metodologi penelitian.
Tahapan berikutnya yaitu analisis. Pada tahap ini dilakukan analisis proses pelaporan tindakan kriminal yang dilakukan oleh masyarakat. Pada tahap ini ada beberapa proses pelaporan yang ada, antara lain yaitu :
a. Masyarakat melaporkan suatu kejadian atau peristiwa kriminal kepada pihak Kepolisian terdekat dengan layanan pusat panggilan. b. Adanya laporan dari masyarakat
tersebut pihak kepolisian secara tanggap mengarahkan personilnya untuk menyidik ke TKP (Tempat Kejadian Perkara).
c. Laporan yang di lakukan oleh masyarakat diproses dengan melakukan konseling (penyaringan) yang kemudian di tindak lanjutin oleh Bareskim.
d. Yang kemudian pihak Kepolisian menanganin laporan berdasarkan perkara yang terjadi berdasarkan berat atau ringannya suatu perkara yang di jatuhkan hukuman menurut undang-undang hukum pidana (KUHP). e. Jika masyarakat melaporkan suatu
terbitkan surat kuasa kepada Polsek tersebut untuk menanggani proses pelaporan tersebut.
f. Dan apabilah pihak pelapor ingin pengaduannya di tangganin oleh pihak Polresta, maka pihak dari Polresta tersebut meminta persetujuan dari pihak Reskim atau Wakas Reskim, jika Pakasat dan Wakasat setujuh maka pelaporan perkara tersebut di tanggani oleh pihak Polresta Medan. Tahap selanjutnya yaitu desain, pada tahap ini dirancang aplikasi sebaik mungkin, agar aplikasi dapat digunakan dengan mudah (user friendly). Antarmuka pengguna (user interface) merupakan aspek sistem komputer atau program yang dapat dilihat, didengar, atau dipersepsi oleh manusia, dan perintah-perintah atau mekanisme yang digunakan pemakai untuk mengendalikan operasi dan masukan data pada komputer. Desain Antarmuka sistem dikembangkan dengan strategi Menu-Driven, yaitu strategi yang mengarahkan pengguna memilih sebuah action dari menu pilihan. Desain menu utama aplikasi seperti pada Gambar 2 berikut,
Tampilan Awal/ SplashCreen
Halaman Menu
Polsekta Terdekat
Polsekta
Medan Bantuan Tentang Keluar
Mencari
Posisi Lokasi Detail Polsek
Panggilan
Maps Panggilan
Gambar 2. Menu Utama Aplikasi 5.Pengujian dan Implementasi
Kebutuhan kesesuaikan perangkat pendukung dengan aplikasi yang dibangun sangatlah penting sehingga nantinya aplikasi yang telah selesai dapat diimplementasikan dengan baik dengan kinerja yang tinggi. Berikut spesifikasi perangkat keras yang minimum digunakan dalam proses pengembangan aplikasi ini.
Tabel 1. Spesifikasi Hardware
Komponen Spesifikasi
Operating Sistem Windows Profesional 7
Prosesor Intel® i5 Core Inside
RAM
Hardis
Input Devic Mouse dan Keyboard
Software pendukung yang digunakan dalam mengembangkan aplikasi yaitu Eclipse Juno, Photoshop CS3. Untuk antarmuka aplikasi dibagi menjadi 4 bagian yaitu halaman utama, halaman polsekta Medan, halaman polsekta terdekat, dan halaman bantuan dan halaman tentang. Tampilan antarmuka halaman utama aplikasi terlihat pada Gambar 3 berikut,.
Pada aplikasi sebelumnya sudah direkam semua posisi lokasi dari ke 12 Polsek yang ada di Kota Medan dan sudah diperkenalakan pada coding program dengan mengambil data latitude dan longtide yang di dapat dari Google maps[8] sesuai lokasi alamat dari 12 Polsek di Kota Medan tersebut.
Kemudian titik CP dibandingkan dengan ke semua lokasi di 12 titik Polsek di Kota Medan tersebut. Selisih jarak yang nilainya terkecil itulah merupakan letak terdekat dari titik CP ke Polsek terdekat, dan kemudian masyarakat yang ingin melaporkan segera dapat melakukan panggilan secara otomatis ke Polsek terdekat tersebut yaitu posisi Polsek P-4.
Proses kerja dari penjelasan di atas dapat di lihat pada tampilan Gambar. 4 berikut,
Gambar 4. Tampilan Pencarian Polsekta Terdekat
6. Kesimpulan
Aplikasi pusat panggilan tindakan kriminal membutuhkan perangkat smartphone berbasis android yang relatif murah dan mudah didapatkan di pasaran bebas. Aplikasi ini dapat digunakan masyarakat untuk semua kalangan mulai dari usia remaja hingga dewasa. Aplikasi pusat panggilan tindakan kriminal ini dapat digunakan masyarakat untuk melaporkan peristiwa atau tindakan kriminal seperti: KDRT, pencurian, pemerkosaan, penganiayaan, pembunuhan, kecelakaan lalu lintas dan lain-lain termasuk juga terorisme. Untuk pengembangan selanjutnya dapat ditingkatkan sehingga menjangkau seluruh Polsek yang ada di Indonesia.
7.Bahan Referensi
[1]Nazruddin Safaat H, 2012, Android Pemrograman Aplikasi Mobile Smartphone dan Tablet PC berbasis Android, Bandung, Informatika.
[2]Wisnuh, E.W, 2012, Asiknya Bernavigasi dengan Ponsel GPS, Andi, Yogyakarta.
[3] http://developer.android.com/about/index.html diakses pada tanggal 30 Juni 2013.
[4] Undang Undang Republik Indonesia Nomor 2 Tahun 2002 Tentang Kepolisian Negara Republik Indonesia.
[5]http://news.okezone.com/read/2013/06/29/337/
829566/kesenjangan-sosial-meningkat-kriminalitas-merebak diakses pada tanggal 30 Juni 2013.
[6] http://help.eclipse.org/kepler/index.jsp diakses pada tanggal 30 Juni 2013.
[7] http://www.beritakriminal.net/ diakses pada tanggal 30 Juni 2013.
[8]
CONTROL SYSTEM DESIGN WITH SWARM MODEL FORMAKING
FLOCKING ON UNMANNED SMALL
SCALE HELICOPTER
Albert Sagala
Computer Engineering Department, Politeknik Informatika Del Jl.Sisimagangaraja Desa Sitoluama Kec.Laguboti, TOBASA,Sumut
ABSTRAK
Fenomena alam, seperti pola kerumunan ikan di lautatau pola sekelompok burung yang bergerak bersama dalam rangka bermigrasi ke daerah yang lebih nyaman untuk hidup telah menjadi perhatian para peneliti untuk waktu yang lama. Berdasarkan pendekatan yang diambil, gerakan individu dipengaruhi oleh tiga faktor, 1) tarikan antara agen karena jarak antar agen yang jauh, 2) tolakan antara agen karena jarak yang terlalu dekat, dan 3) daya tarik ke daerah yang lebih menguntungkan ( atau penolakan dari daerah tidak menguntungkan). Dalam penelitian ini, dilakukan perancangan dan simulasi pada perilaku kawanan n-agen (agen yang dipilih adalah helikopter skala kecil nir awak) dan diasumsikan bahwa semua sifat dinamis dari semua agen adalah seragam. Model dinamis swarm digunakan untuk menghasilkan lintasan yang akan dilacak oleh Wahana Udara Nir Awak (WUNA). Pergerakan dinamis WUNA didasarkan pada jarak antara WUNA serta kondisi lingkungan.
Kata Kunci: UAV, Small scale helicopter, WUNA, Swarm Intelligence,helicopter flocking
1. Introduction
Swarming atau agregasi dari sekumpulan individu dalam suatu grup dapat ditemukan secara alamiah pada berbagai organisme, mulai dari organisme sederhana (bakteri) sampai kepada organisme yang kompleks seperti mamalia [1]. Perilaku tersebut dapat muncul karena berbagai mekanisme, misalnya, suatu individu akan merespon terhadap kondisi lingkungan disekitarnya, misalnya saja suatu area di mana terkandung nutrisi yang melimpah atau terdapat distribusi bahan kimia yang ditinggalkan oleh organisme lainnya. Proses ini disebut dengan chemotaxis dan dipergunakan oleh suatu organisme seperti bakteri dan serangga sosial. Evolusi dari perilaku swarming dikendalikan oleh suatu keuntungan akan kebersamaan dan perilaku terkoordinasi untuk menghindari pemangsa dan juga untuk meningkatkan peluang mencari sumber makanan. Sebagai contoh, pada [1] [2] Passino dan Gazy menjelaskan bagaimana social forager sebagai suatu group sukses untuk melakukan chemotaxis pada suatu daerah yang buruk jika dibandingkan dengan melakukannya sendirian. Dengan kata lain, suatu individu cenderung untuk bisa melakukan lebih baik jika melakukan suatu pekerjaan secara kolektif.
2. Latar Belakang (Related Work)
Pada penelitian beberapa tahun belakangan ini, terdapat ketertarikan yang sangat signifikan untuk pengontrolan pergerakan agen yang bergerak membentuk suatu formasi tertentu atau melakukan suatu pekerjaan yang terkoordinasi [2] [3] [4] [7] [8] [9]. Hal ini dikarenakan banyak keuntungan yang diperoleh jika sistem terkoordinasi dilakukan, misalnya saja dapat melakukan suatu pekerjaan yang sulit dilaksanakan apabila jika hanya dilakukan oleh satu agen tunggal. Beberapa aplikasi yang cocok untuk sistem terkoordinasi adalah pencarian bersama dengan multi-agen, kontrol lalu lintas di udara, kontrol formasi satelit, misi penjelajahan di bawah laut atau ruang angkasa.
Helikopter tanpa awak saat ini banyak dipakai untuk melakukan berbagai misi, misalnya saja suatu helikopter, Wahana Udara Nir Awak (WUNA) yang dipakai untuk memonitor suatu wilayah pasca terjadinya suatu gempa atau beberapa helikopter tanpa awak yang diinginkan untuk bisa memonitor disuatu wilayah perbatasan negara.
membentuk formasi sesuai dengan yang ditentukan, untuk melakukan suatu misi pekerjaan [3][4][5]. Misalnya, beberapa wahana yang dikirim ke tempat terjadinya bencana, di sana wahaha ditugaskan untuk mengumpulan data, sehingga bisa diambil langkah strategis untuk pemulihan setelah bencana terjadi.
3. Model Dinamika Helikopter Yamaha R-50 Helikopter Yamaha R-50 pada awalnya adalah helikopter skala kecil yang dipasarkan secara komersial untuk kepentingan pertanian.Gambar 1 dan Tabel 1 memberikan beberapa karakteristik fisis.
Gambar 1 Dimensi Helikopter Yamaha R-50
Tabel 1 Parameter Fisik Yamaha R-50 Rotor Speed 850 r.min-1
Tip Speed 449 ft/s Dry weight 97 lb. Instrumented 150lb.
Engine Single cylinder, 2-stroke Flight autonomy 30 minutes
Model Ruang Keadaaan Dinamika R-50 4. Model Swarm
Misalkan ada M individu anggota swarm dalam sebuah ruang Euclidean dengan dimensi-n. Dimodelkan masing-masing individu sebagai titik dan mengabaikan dimensinya. Posisi dari anggota i disimbolkan sebagai n
i
R
x
. Diasumsikan gerak synchronous dan tidak ada waktu jeda, semua anggota swarm bergerak secara simultan dan masing-masing mengetahui posisi relatif dari anggota lainnya. Gerak dinamis berevolusi secara kontinyu. Persamaan gerak dari individui
diberikan oleh persamaan
.
merepresentasikan profile dari attractant/repellent atau
-profile, yang mana bisa sebagai profile dari adanya suatu sumber makanan atau bahan kimia beracun. Diasumsikan bahwa suatu area yang memilikni nilai minimum adalah suatu area yang menarik bagi anggota
melambangkan suatu wilayah netral.(.)
dapat mewakili beberapa kombinasi dari beberapa profile attractant dan repellent.Sehingga suku
x
i
(
x
i)
melambangkan gerak individu menuju suatu wilayah dengan kandungan nutrisi yang tinggi dan menjauhi suatu wilayah dengan wilayah dengan kandungan racun tinggi.Pada suku kedua,
g
(.)
merepresentasikan fungsi tarikan dan tolakan yang terjadi diantara anggota-anggota. Dengan kata lain, arah dan besar gerak masing-masing anggota ditentukan oleh penjumlahan fungsi tarikan dan tolakan dari masing-masing anggota yang terlibat.Fungsi tarikan dan tolakan yang dipakai adalah seperti pada persamaan di bawah
Gambar 2 Fungsi Tarikan dan Tolakan Pada Gambar 2 terlihat bahwa, fungsi tarikan dominan pada jarak antara individu yang jauh dan sebaliknya fungsi tolakan dominan pada jarak antara individu yang dekat. Dengan
5. Pemodelan dan Formasi Kontrol Terbang Pada penelitian ini dirancang sistem kontrol dua lup.Disain sistem kontrol lup pertama pada model swarm untuk menghasilkan penjejakan dan disain kontrol lup kedua pada WUNA agar mampu melakukan penjejakan pada lintasan yang dikeluarkan oleh model swarm. Pada disain kontrol lup pertama, dilakukan disain dengan pendekatan kontrol proporsional dan turunan, dengan memperhitungkan kesalahan yang terdapat pada kesalahan posisi i
p Pada disain kontrol lup kedua, mempergunakan
model dinamis helikopter
),
dengan pendekatan Regulator Linear Kuadratik diskrit.
5.1 Perancangan Sistem Kontrol Model Swarm Pada penelitian ini, model swarm yang dikembangkan adalah suatu model yang memiliki ciri bahwa tidak ada pemimpin di antara anggota swarm. Persamaan dinamika anggota swarm dimodelkan seperti pada persamaan
i
Pada penelitian ini, protokol kontrol untuk agent dimodelkan sbb:
Blok Diagram Sistem Kontrol yang disain adalah
Gambar 3 Blok Desain Kontrol Model Swarm
Pada pengontrol P , terdapat 3 buah Penguatan controller proporsional, yakni
k
a,
k
b,
k
r. Sedangkan penguatank
vdan penguatank
fsecara berturut-turut adalah koefisien redaman kecepatan dan penguatan untuk mengikuti profile pergerakan agen yang diinginkan.
Penalaan penguatan P dan D dilakukan secara manual, seperti pada hasil yang diperoleh pada Bab berikutnya.
5.2 Perancangan Sistem Kontrol Helikopter Yamaha R-50
Rancang blok sistem control helicopter Yamaha R-50
seperti pada gambar di bawah.
Gambar 4 Blok diagram Kontrol WUNA
Persamaan Regulator Kuadratik Linear
Persamaan linear regulator dalam teori kontrol optimal merepresentasikan kelas permasalahan dimana plane dinamis adalah linear dan bentuk quadratik untuk kriteria performansi yang dipergunakan. Persamaan dinamika linear (dapat juga waktu berubah), dituliskan sbb:
),
dan biaya adalah kuadratik dalam bentuk
,
Dimana kebutuhan untuk matriks pembobotan diberikan oleh tetap.Hukum kontrol optimal umpan balik keadaan diperoleh dengan persamaan Hamiltonian-Jacoby-Bellman (HJB).
atas, H dituliskan seperti di bawah.
)].
, diminimalkan terhadap u, diperoleh
0
Kontrol optimal diperoleh dengan kondisi stasioner, diselesaikan untuk u.
T
Persamaan Hamiltonian selanjutnya dituliskan menjadi nilai perubahan penguatan
K
0
, menghasilkan Persamaan Aljabar Riccati, persamaan kontrol optimal yang dihasilkan adalah).
Persamaan di atas adalah persamaan umpan balik keadaaan untuk persoalan kontinyu LQR.Sedangkan pada penelitian ini dilakukan diskritisasi dengan mempergunakan fungsi lqrd untuk memperoleh penguatan K diskrit yang telah disedikan oleh MATLAB.
5.3 Formulasi Penjejakan Lintasan
Penggunaan desain LQR untuk penjejakan lintasan, maka permasalahan regulator harus dikonversi menjadi persoalan penjejakan.Dalam masalah penjejakan, nilai keluaran y dibandingkan dengan nilai y referensi.Tujuan yang ingin diperoleh adalah kesalahan antara nilai referensi dan nilai keluaran menuju nol, biasanya dengan menambahkan sebuah integrator pada kesalahan sinyal dan selanjutnya meminimalkan.Alternatif pendekatan lainnya adalah dengan mempergunakan turunan dari kesalahan sinyal.Misalkan diasumsikan diperoleh pengukuran yang sempurna, maka kesalahan sistem dituliskan dalam bentuk
)
Turunan terhadap waktu, diperoleh persamaan
)
Jika referensi didefinisikan tetap, maka
0
)
(
t
x
ref , dihasilkanx
error(
t
)
x
(
t
)
.Makahukum lintasan penjejakan dapat mempergunakan persamaan umum di bawah
)
menentukan bobot dari performansi penjejakan dalam fungsi biaya. Dalam bentuk matriks, persamaan di atas dapat ditulis menjadi
persamaan di atas dapat dituliskan menjadiPada perancangan sistem kontrol untuk model WUNA yang dipakai, model matriks A10x10
diperluas menjadi matriks A14x14 dan matriks B10x4
diperluas menjadi B14x4, sehingga lebih
memudahkan untuk melakukan penjejakan dalam orientasi NEA (North East Altitude).
Dan dari hasil penalaan terhadap penguatan LQR, saat ini diperoleh penguatan Q dan dan penguatan R sbb.
Penguatan pembobotan keadaan x,y,z diberikan tinggi karena akan dilakukan penjejakan terhadap x,y,z. Sedangkan nilai pembobotan untuk keadaan z lima kali lebih besar dari pada x dan y, hal ini karena pada simulasi diperoleh bahwa z sangat sensitive terhadap perubahan lintasan, sehingga berakibat kesalahan lebih besar jika dibandingkan dengan lintasan x dan y.
Agar hasil simulasi dapat dengan mudah diinterpretasikan secara fisis, maka dilakukan transformasi dari body frame ke inertial frame, dengan transformasi matriks seperti di bawah
simulasi yang akan dijalankan akan dalam bentuk koordinat inertial frame. Persamaan terkait untukposisi dan kecepatan dalam kerangka inersia adalah:
6. Simulasi Formasi Terbang
Hasil penjejakan lintasan yang dihasilkan pada program simulasi Matlab adalah sbb:
1. Penjejakan Lintasan Kotak
Gambar 5 Penjejakan Lintasan Kotak
Gambar 6 Penjejakan Lintasan Kotak 3D
Gambar 8 Kecepatan Vx,Vy,Vz lintasan kotak Pada penjejakan lintasan kotak yang diberikan Gambar 5 sd. Gambar 8, diperoleh bahwa disain kontrol yang dirancang mampu melakukan penjejakan dengan kesalahan rata-rata yang kecil, seperti terlihat pada tabel di bawah.
Tabel 2 Kesalahan RMS (Root Mean Square) Kesalahan Penjejakan Lintasan Kotak
Kesalahan sb-x 0.2313 m Kesalahan sb-y 0.0470 m Kesalahan sb-z 9.0350e-004 m
Dari Tabel 2 Kesalahan RMS (Root Mean Square) Kesalahan Penjejakan Lintasan Kotak, terlihat kesalahan penjejakan sangat kecil, lebih kecil dari 0.25m untuk masing-masing sumbu-sumbu, bahkan kesalahan pada sumbu-z sangat kecil sekali, yakni 9.0350e-004 m.
Penjejakan Lintasan lingkar
Gambar 9 Penjejakan Lintasan Lingkar
Gambar 10 Penjejakan Lintasan Lingkar 3D
Gambar 11 dcoll,dlatt,dlong,dcoll penjejakan lintasan lingkar 3D
Gambar 12 Kecepatan Vx,Vy,Vz Lintasan Lingkar
Pada penjejakan lintasan lingkar yang diberikan Gambar 9 Penjejakan Lintasan Lingkar sd. Gambar 12 Kecepatan Vx,Vy,Vz Lintasan Lingkar, diperoleh bahwa disain kontrol yang dirancang mampu melakukan penjejakan dengan kesalahan rata-rata yang kecil, seperti terlihat pada tabel di bawah.
Tabel 3 Kesalahan RMS (Root Mean Square) Penjejakan Lintasan Lingkar
Kesalahan sb-x 0.8887 m Kesalahan sb-y 0.3067 m Kesalahan sb-z 0.8949 m
Dari Tabel 3 Tabel 3 Kesalahan RMS (Root Mean Square) Penjejakan Lintasan Lingkar terlihat kesalahan penjejakan sangat kecil, lebih kecil dari 0.25m untuk masing-masing sumbu-sumbu, bahkan kesalahan pada sumbu-z sangat kecil sekali, yakni 9.0350e-004 m.
Hasil penjejakan yang diperoleh pada lintasan kotak dan lurus (kesalahan yang kecil) memberikan jaminan bahwa wahana akan mampu melakukan penjejakan terhadap lintasan yang akan diberikan oleh model swarm.
Disain Percobaan Melakukan Flocking pada WUNA
Dua buah desain kontrol yang dikembangkan diterapkan kepada suatu group WUNA dengan jumlah agen N. Dalam masing-masing simulasi, kondisi awal agen diberikan melalui satu set posisi awal secara acak (distribusi seragam pada area (100x100), dengan kecepatan awal agen diberikan secara acak. Namun pada beberapa simulasi, posisi awal agen ditentukan untuk mempermudah analsis, misalnya melihat pengaruh dari faktor perubahan nilai penguatan tarikan atau tolakan.
7. Hasil dan Pembahasan Skenario 1
Sebelas agen terpisah pada posisi yang sembarang, melakukan swarm secara otomatis, hanya dipengaruhi oleh jarak antara agen.
Gambar 13 Simulasi Kerumunan Agen Swarm Penjelasan
Pada hasil simulasi yang diperoleh dari Gambar 13 Simulasi Kerumunan Agen Swarm, dapat ditarik beberapa analisis sebagai berikut.
-Anggota swarm bergerak cepat untuk membentuk suatu kohesi yang sempurna dengan waktu hanya kurang dari 10 detik, terlihat juga bahwa besar kecepatan berkurang sampai akhirnya menuju nol. Dari Gambar 13, terlihat bahwa flocking telah dilakukan oleh ke sebelas anggota sebelum pada akhirnya masing-masing anggota swarm memiliki kecepatan nol. Dari hasil studi literatur, diketahui bahwa kecepatan akhir bisa saja tidak nol, hal ini terjadi apabila dikenakan gangguan pada swarm yang berakibat masing-masing member swarm terus bergerak menuju keadaan setimbang namun belum tercapai karena adanya gangguan.
Skenario 2
Tiga WUNA bergerak pada posisi yang sudah ditentukan, Trajektori Helikopter diperoleh dari model swarm. Kondisi tidak ada attractant/repellent, jadi dinamika pergerakan anggota WUNA hanya dipengaruhi oleh posisi agen relatif terhadap anggota WUNA lainnya. (N=3,a=1,b=20,c=2,kv=0.1,k1=k2=1,kf=0)
Gambar 14 Gerak Dinamis 3 WUNA tanpa ada Attractant/Repellent
Pada Gambar 14, posisi awal WUNA dilambangkan oleh xdan o melambangkan posisi akhir (Lambang ini akan dipakai pada semua gambar simulasi yang dilakukan). Pada posisi akhir WUNA, dapat dilihat WUNA membentuk formasi segitiga dengan koordinat akhir pada H1(7.7,7.2), H2( 6.4,9.6), H3(8.4,8.6).
Skenario 3
Gambar.15 Pergerakan WUNA akibat adanya Attractant/Repellent
Gambar.16 Masukan Kontrol Pergerakan WUNA akibat adanya Attractant/Repellent
Dari Gambar 15 dan Gambar 16, WUNA bergerak menuju koordinat tujuan (60,60) setelah sebelumnya berhasil melakukan flocking. Sinyal kontrol masukan un,uan, dan ubn bervariasi, hal ini
tergantung dari posisi awal WUNA yang diberikan. Sehingga ketiga WUNA berhasil melakukan flocking sejak dari koordinat (70,60) sambil menghindari adanya tumbukan di antara WUNA.
Skenario 4
Pada pengujian kali ini, diujicobakan pengaruh gerakan dinamis WUNA terhadap adanya rintangan dan tarikan-tolakan antar individu agen. Pada gambar terlihat bahwa gerakan individu lebih kuat dipengaruhi oleh kondisi lingkungan ( fungsi tujuan dan fungsi rintangan lebih aktif dari pada fungsi atraksi-tolakan antar individu). Parameter Simulasi:
H1(20,10,0), H2(40,20,0), H3(40,0,0), Q=20I14,
R=I4, k1=k2=kv=kf=1 ,a=1, b=20,c=8,
Goal(15,20,0), T=40 detik.
Gambar.17 Lintasan WUNA karena Faktor Lingkungan
Pada Gambar 17, WUNA bergerak dari posisi awal yang diberikan H1(20,10,0), H2(40,20,0),
H3(40,0,0). Lintasan yang ditempuh oleh tiga
WUNA menuju koordinat tujuan (15,20,0) seperti pada garis lintas berwarna merah, hijau dan biru. Terlihat bahwa ketiga WUNA bergerak menuju tujuan (attractant) sambil menghindari rintangan (repellent).
Lintasan ketiga WUNA dapat dilihat pada Gambar 19, terlihat bahwa ketiga WUNA pada waktu menuju posisi akhir tetap mampu menghindari adanya tumbukan diantara WUNA. Hal ini akan disimulasikan lebih lanjut untuk melihat faktor yang paling dominan pada model swarm agar tumbukan bisa terhindar.
Gambar.18 Lintasan x,y,z WUNA karena Faktor
Posisi Helicopter 3D, Q=20I14,R=I4
E
Trayektori Posisi UAV, dimensi x
Waktu, dtk
Trayektori Posisi UAV, dimensi y
Waktu, dtk.
0 5 10 15 20 25 30 35 40
-10 0 10
Trayektori Posisi UAV, dimensi z
Gambar.19 Pergerakan Pusat Swarm karena Faktor Lingkungan
Gambar.20 Kecepatan WUNA karena Faktor Lingkungan
Gambar.21 Sudut Gerak WUNA
Pengujian juga dilakukan untuk melihat pengaruh dari parameter a, b, c, kv, kf, k1 dan k2. Hasil dari pengujian tersebut dapat dilihat pada bagian kesimpulan dari tulisan ini.
8. Kesimpulan dan Saran 8.1 Kesimpulan
Dari hasil yang diperoleh pada penelitian ini, dapat ditarik beberapa kesimpulan sbb:
(1) Model pergerakan swarm dapat dipakai menjadi acuan lintasan dari model WUNA yang dipakai, (2) Parameter yang sangat berpengaruh pada bentuk formasi adalah parameterc, nilai c akan sangat berpengaruh pada jarak antara agen, yang akan menentukan bentuk formasi yang akan dibuat, (3) Pada uji simulasi yang dilakukan, WUNA berhasil dengan baik melakukan penjejakan lintasan dengan adanya posisi tujuan akhir dan rintangan ketika menuju tujuan akhir, dengan nilai parameter terbaik (untuk penelitian ini) diberi nilai k1=0.1, k2=1,kf=1,kv=0.1, a=1,
b=40 dan c=9. 8.2 Saran
Arah penelitian lebih lanjut yang bisa dilakukan, terkait dengan penelitian ini adalah:
Pada penelitian ini, tidak ada waktu jeda ketika informasi dikirimkan dari satu agen menuju agen lainnya. Tentunya pada keadaan nyata, waktu jeda akan selalu ada karena dibatasi oleh jalur transmisi data yang dipakai. Tentunya akan menarik jika penjejakan model swarm melibatkan waktu jeda.
Pada penelitian ini, informasi posisi dan kecepatan yang diterima oleh agen i tidak terkandung adanya kesalahan. Tentunya akan lebih menarik jika lintasan yang dihasilkan terkandung kesalahan, sehingga menurut penulis waktu yang diperlukan untuk melakukan flocking akan lebih lama dari pada waktu yang penulis peroleh pada penelitian ini. Dan ini masih harus dibuktikan melalui ujicoba dengan adanya gangguan. Pada penelitian ini, yang menjadi target
atau posisi akhir dari agen adalah tetap. Perlu diujicobakan, bagaimanakah perilaku model swarm jika diberikan target bergerak. Misalnya target bergerak dengan suatu lintasan g(t)=2t+3, dengan t adalah waktu.
Daftar Pustaka
[1] Kevin M. Passino, “Biomimicry for optimization, control and automation”,
Springer 2008.
[2] V.Gazy and Kevin M.Passino,”Stability
Analysis of Social Foraging Swarms”, IEEE
Transactions on System, Man and Cybernetics Vol.34 No 1 February 2004. [3] Yang Ji-Chen and u Qi,” Flocking of multi
-agent system following virtual leader with time-varying velocity”, Chin.Phys.LETT
Vol.26, No. 2(2009) 020501.
[4] V.Gazy,”Formation Control of a Multi-Agent
System Using Nonlinear
Servomechanism”,xxxxxxxx
[5] Xiaorui and Eyad H.A,”New formation control designs with virtual leaders”, taken
from iopscience.iop.org, download on 12/08/2010 at 08:14.
[6] E.Joelianto,Maryami E, A.Budiyono,A,
Penggalih,DR “Model Predictive Control
System Design for a small scale Autonomous
Helicopter”, submitted to AEAT, 2010. [7] V.Gazy and K.M.Passino,”Stability Analysis
of Swarms”, IEEE Transaction on Automatic
Control, VOl. 48 No. 4, April 2003.
[8] Xiaohai Li, Z.Cai and J.Xiao,”Stable
Swarming by Mutual Interactions of Attraction/Alignment/Repulsion:Fixed
Topology”, Proceeding of the 17th World
Congress The International Federation of Automatic Control, Seoul,Korea, July 6-11,2008.
[9] V.Gazy and K.M. Passino,”Stability Analysis
of Social Foraging Swarms: Combined
Effects of Attractant/Repellent Profiles”,
Proceeding of the 41st IEEE Conference on Decision and Control Las Vegas, Nevada USA, December 2002
[10] H.Y Sutarto, A.Budiono, E.Joelianto, Go
Tiau Hiong, “Switched Linear Control of a Model Helicopter”, Int. Conf. Control,
Automation, Robotics and Vision Singapore, 5-8th December 2006.
[11] F.Cucker and J. Dong,”Avoiding Collisions in Flocks”, IEEE Transaction on Automatic Control VOl. 55 No. 5 May 2010.
[12] V.Gazy and K.M.Passino,” Decentralized
output regulation of a class of nonlinear
system”, International Journal of Control,
VOl. 79 No. 12, December 2006, pp. 1512-1522.
[13] J.Ghommam, H. Mehrjerdi, M.Saad and F.
Mnif,”Formation path following control of
unicycle-type mobile robots
[14] Xiaorui and Eyad H.A,” Formation Control
With Virtual Leaders and Reduced
Communications”, Proceeding of the 44th
IEEE Conference on Decision and Control, and the European Control Conference Spain, 2005.
[15] Budiyono dan Wibowo, “Optimal Tracking Control Design for a small scale helicopter”,
JBE 4 pp.271-280, 2007
SIMULASI VENDING MACHINE SOFT DRINK DENGAN
MENGGUNAKAN METODE FINITE STATE MACHINE AUTOMATA
Elida Tuti Siregar
Sekolah Tinggi Manajemen Informatika Potensi Utama Jln.KL Yos Sudarso KM 6.5 Tanjung Mulia Medan
ABSTRAK
Minuman adalah kebutuhan yang tidak lepas untuk melepas rasa haus dan dahaga,apalagi Negara kita merupakan Negara iklim tropis sehingga tingkat kebutuhan akan minuman yang dingin ataupun segar sangat tinggi sekali. Di Indonesia ini banyak sekali orang yang berjualan minuman digin, baik yang menjajakanya diterotoar maupun dikios-kios. Tetapi jika malam hari ada yang membutuhkan minuman dan pada waktu itu masih berada dikantor dan pekerjaanya membeli minuman diluar yang letaknya jauh. Untuk mengatasi hal tersebut maka penulis memiliki ide untuk merencanakan dan membuat sebuah vending machine automatic softdrink sehingga para pekerja kantoran maupun instansi jika merasa haus maka tidak perlu repot-repot untuk keluar dari area kantor tersebut Dengan adanya vending machine automatic softdrink ini akan bekerja dengan sendirinya scara otomatis selayaknya penjaga minuman yang bisa melayani pembeli sesuai keinginan pembeli tersebut. Adanya Vending machine ini akan memudahkan para pengusaha meningkatkan penjualannya karena tidak perlu repot-repot tutup dan buka pada hari-hari tertentu tanpa perlu untuk menjaganya karena vending machine ini bekerja secara otomatis sebagai pengganti manusia dalam menjaga tokonya dan sangat mendukung untuk meningkatkan kemajuan teknolog dizaman modren ini. Setiap mesin memiliki masing-masing algoritma yang bergantung kepada fungsi dan tujuan mesin tersebut,secara garis besar algoritma vending machine ini akan dibahas pada skripsi ini menggunakan teori otomata atau sekuensial menggunakan metode tranducer finite state with output.
Kata Kunci : Vending machine,Automatic,metode FSM
1. Pendahuluan
Indonesia merupakan Negara yang memiliki iklim tropis,sehingga udara yang ada diindonesia ini sangat panas sekali. Sehingga tingkat kebutuhan akan minuman yang dingin ataupun segar sangat tinggi sekali .Di indonesia ini banyak sekali orang yang berjualan minuman dingin,baik yang menjajakanya diterotoar maupun dikios-kios. Tetapi jika malam hari ada yang membutuhkan minuman dingin dan pada waktu itu masih berada dikantor dan pekerjaannya dan membeli minuman diluar yang letaknya jauh. Dan untuk mengatasi hal tersebut maka seharusya didalam kantor tersebut terdapat sebuah lemari pendingin ataupun suatu mesin penjual minuman ringan yang dingin.
Berdasarkan hal tersebut diatas maka penulis memiliki ide untuk merencanakan dan membuat sebuah mesin penjual minuman ringan yang dingin. Sehingga para pekerja kantoran maupun instansi yang lain jika mereka merasa haus maka tidak perlu repot-repot untuk keluar dari area kantor tersebut.
Penggunaan vending machine softdrink ini sangat penting, terutama dalam meningkatkan
kemajuan teknologi dan untuk mempermudah seseorang untuk mencari minuman ditegah jalan atau saat malam hari. Masih banyak para pengusaha di Indonesia masih belum menggunakan vending machine softdrink ini. Sistem mesin penjual minuman otomatis ini sangat praktis sekali dalam penggunaanya. Sehingga vending machine softdrink ini mudah digunakan.
berhingga status, dimana setiap status tersebut menyatakan informasi mengenai input yang lalu, dan dapat pula dianggap sebagai mesin memori. Input pada mesin otomata dianggap sebagai bahasa yang harus dikenali oleh mesin. Disajikan dengan suatu input string, suatu acceptor apakah akan menerima (mengenali) string tersebut atau menolaknya. Otomata yang lebih umum yaitu yang mampu menghasilkan string output.
2. Teori Bahasa Dan Otomata
Otomata [3] berasal dari kata automatic yang artinya bekerja dengan sendirinya. Secara istilah, otomata adalah ilmu yang mempelajari mesin abstrak yang dapat menerima masukan secara sekuensial dan dapat menghasilkan keluaran. Setiap otomata memiliki mekanisme untuk membaca masukan dari awal hingga akhir. Otomata juga dapat dirancang untuk menghasilkan keluaran, menyimpan sementara simbol dari alfabet dan memanipulasi isi dari sel simpanan. Otomata mempunyai unit kendali yang memiliki berhingga status dan mampu mengubah status tersebut.
Secara umum, otomata dapat digolongkan menjadi dua, yaitu accepter dan tranducer. Accepter (recognizer) adalah otomata yang akan membuat keputusan tentang diterima atau tidaknya suatu masukan, sedangkan tranducer adalah accepter yang
mampu menghasilkan keluaran. 1. Grammar (Tata Bahasa)
Bahasa didefinisikan sebagai himpunan
bagian dari ∑* (himpunan string hasil
konkatenansi nol atau lebih simbol). Bahasa terdiri dari perbendaharaan kata (vocabulary) dan tata bahasa (grammar, sintaks). Perbedaan struktur kalimat dapat mengakibatkan perbedaan pemaknaan, bahkan dapat menyebabkan kerancuan. Misalnya untuk kalimat “Kelinci dan kambing memakan rumput” tidak mungkin diubah komposisinya menjadi “Rumput dan kambing memakan kelinci”.
Bahasa Mesin Otomata Aturan Produksi
Automata (PDA) sebuah simbol
Mesin Turing Tidak Ada Batasan
Di dalam aturan bahasa Indonesia, kalimat
“Rumput dan kambing memakan kelinci”
termasuk ke dalam kalimat aktif transitif.
“kelinci” dan “kambing” sebagai subjek, “memakan” sebagai predikat dan “rumput” sebagai objek. Kata “dan” menunjukkan
perbandingan setara. Adapun aturan yang dipenuhi oleh kalimat tersebut di atas adalah:
<kata benda> → kambing, kelinci, rumput, … <kata kerja> → makan, …
<kata aktif> → me <kata kerja>, …
<perb setara> → <kata benda> dan <kata benda>, …
<kalimat aktif> → <perb setara> <kata aktif> <kata benda>, …
Cara penulisan tersebut dinamakan aturan produksi (production rules). Kata atau simbol nyata pada kalimat tersebut dinamakan simbol terminal, sedangkan yang berada di dalam tanda < dan > disebut dengan simbol non-terminal. Tata bahasa (grammar) bisa didefiniskan secara formal sebagai kumpulan dari himpunan-himpunan variabel, simbol-simbol terminal, simbol awal, yang dibatasi oleh aturan-aturan produksi. Grammar (G) merupakan fungsi dari
P = himpunan aturan produksi
Ada banyak kesamaan stuktur di dalam bahasa manusia dengan bahasa pemrograman tingkat tinggi karena bahasa pemrograman tingkat tinggi memang dirancang untuk berkomunikasi antara manusia dan mesin dengan bahasa yang
“mendekati” bahasa manusia .
2. Diagram Status Transisi
Gambar 1. Notasi dari diagram status 3. Bahasa Reguler
Suatu tata bahasa L(G) = (V, T, S, P) dikatakan sebagai bahasa reguler jika ruas kiri berupa satu simbol variabel dan ruas kanan maksimal memiliki satu simbol variabel, contoh:
S → aB | cDe.
4. Finite Automata (FA)
Mesin yang mengenali bahasa reguler adalah Finite Automata (FA). Otomata jenis ini tidak memiliki penyimpan. Sebuah FA didefinisikan sebagai:
M = (Q, ∑, , S, F) dimana:
Q = himpunan status, Q
∑ = himpunan simbol masukan, ∑
= fungai transisi S = status awal, S Q
F = himpunan status akhir, F Q, F FA yang menerima masukan dengan tepat satu transisi status disebut dengan Deterministic FA (DFA), sedangkan FA yang menerima masukan lebih dari satu transisi status disebut dengan Non Deterministic FA (DFA).
5. Bahasa Bebas Konteks
Bahasa bebas konteks sangat berperan dalam pengembangan teknologi kompiler sejak tahun 1960, khususnya dalam mengimplementasikan parser. Suatu tata bahasa L(G) = (V, T, S, P) dikatakan sebagai bahasa bebas konteks jika ruas kiri berupa satu simbol variabel dan ruas kanan
tidak dibatasi, contoh: S → I | E + E | ( E ).
Bahasa bebas konteks digunakan pada pembuatan parser.
6. Finite State Machine
Finite State Machine juga termasuk dalam teori bahasa automata yang dapat menerima inputan seperti FA, akan tetapi di dalam finite state machine ini juga dapat menerima inputan dan juga dapat mengeluarkan output sehingga dalam finite state machine terdapat dua type finite state machine yakni
a. State Machine With Output / Tranducer 1. Meanly machine : Diantara state terdapat fungsi transisi
2. Moore machine : Output yang ditentukan oleh state
b. Finite State Machine With No output Finite State Automata
Sering digunakan untuk pengenalan bahasa. Dari keduanya kita dapat menentukan type Finite State yang kita gunakan.
a. Finite State Machine With Output / Tranducer Finite State Machine with Output sering digunakan dalam Salah satunya mesin ATM yang menerima masukan berupa kartu ATM dan Keluaranya Berupa Uang, sehingga dapat dikatakan Mesin ATM menggunakan fungsi dari FSM With Output,
Contoh lainnya adalah Mesin Vending Machine (mesin jaja), yang menerima masukkan berupa koin yang dimasukkan kedalam machine kemudian keluarannya berupa minuman atau yang lain
Sebagai contoh, Seorang anak kecil mempunyai uang sebesar Rp 3500 ,- , dan ingin memilih jus jeruk kalengan di mesin jaja dengan koin Rp 1000,- sebanyak 3 buah dan RP 500,- sebanyak 1 buah kemudian anak itu memasukkan koin seribu kedalam mesin sebanyak tiga kali kemudian koin lima ratus sekali sehingga di dalam mesin terdapat koin sebanyak Rp 3500,-dan mesin memunculkan pilihan jus jeruk kalengan seharga Rp 3000,-, sehingga angak itu menekan tombol pilihan untuk jus jeruk dan jus jeruk kalengan akan keluar dari mesin dan anak itu juga mendapatkan kembalian sebesar Rp 500,-.


![Gambar 1. Konstruksi Graph untuk ACOC [3]](https://thumb-ap.123doks.com/thumbv2/123dok/3541715.1444823/63.595.360.495.530.666/gambar-konstruksi-graph-untuk-acoc.webp)