commit to user
PERANCANGAN
PROTOTYPE
PROSTHETIC
JARI TANGAN
MENGGUNAKAN MEKANISME PENGGERAK SISTEM
CROSS CABLE
DAN SISTEM
CROSS BAR
Skripsi
Sebagai Persyaratan Untuk Memperoleh Gelar Sarjana Teknik
DAVIT WITJAKSONO
I 1307005
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK
UNIVERSITAS SEBELAS MARET
commit to user
PERANCANGAN
PROTOTYPE
PROSTHETIC
JARI TANGAN
MEKANISME PENGGERAK SISTEM
CROSS CABLE
DAN
SISTEM
CROSS BAR
Skripsi
DAVIT WITJAKSONO
I 1307005
JURUSAN TEKNIK INDUSTRI FAKULTAS TEKNIK
UNIVERSITAS SEBELAS MARET
commit to user
vi
KATA PENGANTAR
Dengan segala kerendahan hati dan kebesaran jiwa, penulis panjatkan
puji syukur kepada Tuhan Yang Maha Esa yang telah melimpahkan berkat rahmat
dan karunia-Nya, sehingga penulis dapat menyelesaikan tugas akhir ini seperti
yang diharapkan. Atas bimbingan dan bantuan dari berbagai pihak, penulis
mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Tuhan Yesus Kristus Yang Maha Kasih, selalu menjaga dan merawatku
hingga saat ini
2. Bapak dan ibu, kedua orang tua tercinta yang selalu memberikan dukungan
perhatian, kasih sayang, dan doa di setiap perjalanan hidupku.
3. Dina Setiawati, Abednego Danu Setiawan, Mesakh Dani Setiawan my lovely
brother and sister yang selalu ada untuk mendukung dalam segala hal dan
memberi motivasi untuk selalu siap dengan apapun yang terjadi.
4. Bapak Sugeng dan Ibu Wiwik, yang sudah menjadi orang tua keduaku, trima
kasih atas segalanya.
5. Keluarga besar yang tak henti-hentinya membantu dan mendukung serta
mendoakan sampai saat ini.
6. Bapak Dr. Cucuk Nur Rosyidi, ST, MT selaku Ketua Jurusan Teknik Industri
atas segala fasilitas yang diberikan selama masa perkuliahan.
7. Bapak Ilham Priadythama, ST, MT dan Ibu Dr. Ir. Susy Susmartini, MSIE
selaku dosen pembimbing skripsi I dan dosen pembimbing skripsi II yang
selalu membimbing, memberikan wawasan dan motivasi selama penyusunan
laporan skripsi.
8. Ibu Azizah Aisyati, ST, MT dan Bapak Yusuf Priyandari, ST, MT selaku
dosen penguji skripsi I dan dosen penguji skripsi II yang memberikan kritik
dan saran untuk perbaikan laporan skripsi.
9. Bapak Azizah Aisyati, ST, MT selaku Pembimbing Akademis, atas segala
bimbingan dan nasehatnya selama ini.
10.Segenap Dosen-Dosen Teknik Industri Universitas Sebelas Maret atas
commit to user
vii
11.Tiwi yang telah banyak membantu dan memberikan informasi selama
penyusunan laporan skripsi ini.
12.Putri, Tiwi, Yulia, Yopi, Vincent, Indra yang bersedia menemani selama
pengerjaan alat.
13.David yang telah menjadi teman seperjuangan untuk mondar-mandir dan
bimbingan. !!
14.Sahabatku Mamet, yang sudah banyak direpotin untuk jadi tukang ojek dan
nemenin dalam kegiatan apapun selama kita kuliah dari awal semester.
15.Miftah dan Yopi, kalian teman yang hadir disaat-saat akhir.
16.Beny Putranto, kakak seperguruanku bertukar pengalaman hidup.
17.S-BMW, senang menjadi bagian dari kalian.
18.Silmie, trima kasih udah nitipin motornya yang sering aku pake...he...he..
19.Aris, trima kasih aku boleh numpang ditempatmu sementara.
20.Keluarga besar Laboratorium Perencanaan dan Perancangan Produk (P3)
angkatan 2007, Witjak, Putri, Indra, Taruna, Silmie, David, Amrina
terimakasih untuk segala sesuatu serta kebersamaannya selama ini. Semoga
persahabatan kita semakin erat. Hidup Evolution Soul of P3!!
21.Keluarga besar Laboratorium Perencanaan dan Perancangan Produk (P3)
angkatan 2008 dan 2009, terima kasih atas bantuannya.
22.Teman-teman seperjuangan di periode sidang yang sama Filina, David, Bobo,
Habibi, Dias, Wisnu, Bayu . R, Terima kasih untuk kebersamaan di depan
Jurusan, informasi-informasi, dan semua-muanya.
23.Aci, Beny, Filina, Indra, Yopi, Miftah, Catur, Bayu, David, Bobo, Desi,
Ajeng, Febri, Nanung, Salmet, Vincent, Diah, Monica, Rani, Amrina, Nurul,
Sally, Yustin, Zakiah, Pendy, Aris, Novita, Sustika, Mita, Siwi, Silmie, Putri,
Yulia. Keluarga besar nonreg yang saya banggakan. Trima kasih sudah
menjadi teman terdekatku disolo.
24.Teman-temanku angkatan 2007 di Teknik Industri yang tidak dapat disebutkan
satu persatu, atas segala warna hidup dan kenangan indah yang diberikan.
25.Seluruh keluarga besar Teknik Industri, yang tidak dapat disebutkan satu per
commit to user
viii
26.Semua pihak yang pernah aku pinjem laptopnya, nebeng ngeprint, dll selama
pengerjaan skripsi ini.
27.Semua pihak yang belum tertulis di atas, yang telah banyak membantu dalam
proses pengerjaan skripsi ini.
Akhir kata Penulis berharap semoga laporan skripsi ini dapat berguna bagi
Penulis pribadi, bagi Jurusan Teknik Industri dan untuk siapa saja yang
membutuhkan. Penulis menyadari bahwa penyusunan laporan ini masih jauh dari
sempurna karena segala keterbatasan yang ada. Oleh sebab itu, dengan segenap
kerendahan hati Penulis menerima saran dan kritik untuk perbaikan atas
kekurangan yang ada.
Surakarta, Agustus 2012
commit to user
x
DAFTAR ISI
HALAMAN JUDUL i
LEMBAR PENGESAHAN ii
LEMBAR VALIDASI iii
SURAT PERNYATAAN ORISINALITAS KARYA ILMIAH iv
SURAT PERNYATAAN PUBLIKASI KARYA ILMIAH v
KATA PENGANTAR vi
ABSTRAK viii
ABSTRACT ix
DAFTAR ISI x
DAFTAR TABEL xiv
DAFTAR GAMBAR xvi
BAB I PENDAHULUAN I-1
1.1. Latar Belakang Penelitian I-1
1.2. Perumusan Masalah I-3
1.3. Tujuan Penelitian I-3
1.4. Manfaat Penelitian I-4
1.5. Batasan Masalah I-4
1.6. Asumsi Penelitian I-4
1.7. Sistematika Penulisan I-4
BAB II TINJAUAN PUSTAKA II-1
2.1. Tangan Manusia II-1
2.1.1. Anatomi Tangan Manusia II-1
2.2. Prosthetic Tangan II-3
2.2.1. Jenis Prosthetic Tangan II-3
2.2.2. Perkembangan Prosthetic Tangan II-6
2.3. Konsep Dasar Prototype II-8
2.3.1. Esensi Dasar dan Type Prototype II-8
2.3.2. Kegunaan Prototype II-9
2.3.3. Prinsip Prototype II-9
commit to user
xi
2.5. Desain Eksperimen II-11
2.5.1. Factorial Eksperimen II-14
2.5.2. Randomize Block Design II-17
2.5.3. Uji Asumsi II-19
2.6. Penelitian Sebelumnya II-23
BAB III METODOLOGI PENELITIAN III-1
3.1 Identifikasi Masalah III-3
3.2 Pengumpulan Dan Pengolahan Data III-5
3.3 Analisis dan Kesimpulan III-10
3.4 Kesimpulan dan Saran III-10
BAB IV PENGUMPULAN DAN PENGOLAHAN DATA IV-1
4.1 Pengumpulan Data IV-1
4.1.1. Deskripsi Masalah Prosthetic Jari Tangan IV-1
4.1.2. Identifikasi Masalah Prosthetic Jari Tangan IV-2
4.2. Pengolahan Data IV-7
4.2.1. Tahap Functional Domain IV-8
4.2.2. Tahap Physical Domain IV-9
4.2.3. Tahap Process Domain IV-18
4.3. Uji Eksperimen IV-24
4.3.1. Tahap Pengujian Eksperimen IV-24
4.3.2. Perhitungan Gaya Tarik Dinamis Prototype Prosthetic Jari
Tangan
IV-27
4.3.3. Pengolahan Data Statistik IV-28
4.3.4. Uji Anova IV-41
4.3.5. Analisis Hasil Uji Variansi IV-53
BAB V ANALISIS DAN INTERPRETASI HASIL V-1
5.1 Analisis Hasil Penelitian
5.1.1 Perangkat link prosthetic jari tangan
5.1.2 Perangkat base prototypeprosthetic jari tangan
5.1.3 Perangkat sistem penggerak yang terdiri dari komponen
sistem penggerak cross cable dan komponen sistem
penggerak cross bar
V-1
V-2
V-3
commit to user
xii
5.1.4 Analisis Gaya Tarik Dinamis
5.1.5 Analisis Hasil Uji ANOVA
V-5
V-5
5.2. Interpretasi Hasil V-6
BAB VI KESIMPULAN DAN SARAN VI-1
6.1 Kesimpulan VI-1
6.2 Saran VI-2
commit to user
xiv
DAFTAR TABEL
Halaman
Tabel 2.1 Skema umum data sampel eksperimen faktorial menggunakan II-14
3 faktor dan dengan n observasi tiap sel
Tabel 2.2 Anova eksperimen faktorial 3 faktor desain acak sempurna II-17
Tabel 2.3 Susunan k x b untuk randomize blok design II-18
Tabel 2.4 Anova randomize block design II-19
Tabel 2.5 Skema umum daftar analisis ragam uji homogenitas II-22
Tabel 4.1 Permasalahan yang timbul pada desain prostheticjari tangan IV-5
mekanisme sistem penggerak cross cable dan cross bar
Tabel 4.2 Usulan perbaikan dan pengembangan pada prosthetic jari IV-6
tangan serta atribut perancangan
Tabel 4.3 Kebutuhan fungsional dalam pengembangan IV-8
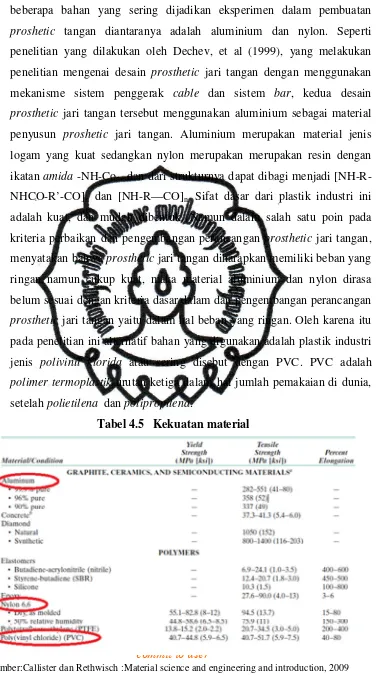
Tabel 4.4 Kekuatan material IV-10
Tabel 4.5 Dimensi prosthetic jari tangan IV-12
Tabel 4.6 Hasil proses grinding komponen penyusun prosthetic jari IV-19
tangan
Tabel 4.7 Hasil proses grinding komponen penyusun prosthetic jari IV-22
tangan
Tabel 4.8 Data hasil pengujian eksperimen 1 IV-28
Tabel 4.9 Data hasil pengujian eksperimen 2 IV-28
Tabel 4.10 Hasil pengukuran gaya tarik dinamis IV-30
Tabel 4.11 Perhitungan uji lilliefors gaya tarik dinamis IV-32
Tabel 4.12 Residual data antar level faktor pembebanan dan desain IV-33
Tabel 4.13 Uji levene dikelompokkan berdasarkan faktor pembebanan IV-34
Tabel 4.14 Residual data gaya tarik dinamis IV-34
Tabel 4.15 Hasil pengukuran gaya tarik dinamis IV-36
Tabel 4.16 Perhitungan uji lilliefors gaya tarik dinamis IV-38
commit to user
xv
Tabel 4.18 Uji levene dikelompokkan berdasarkan faktor pembebanan IV-40
Tabel 4.19 Residual data gaya tarik dinamis IV-40
Tabel 4.20 Data hasil pengujian eksperimen 1 IV-43
Tabel 4.21 Hasil penjumlahan data hasil pengujian eksperimen 1 IV-43
Tabel 4.22 Anova untuk pengujian eksperimen 1 IV-44
Tabel 4.23 Data hasil pengujian eksperimen 2 IV-45
Tabel 4.24 Hasil penjumlahan data hasil pengujian eksperimen 2 IV-46
Tabel 4.25 Anova untuk pengujian eksperimen 2 IV-47
Tabel 4.26 Data hasil pengujian eksperimen 1 IV-48
Tabel 4.27 Hasil penjumlahan data hasil pengujian eksperimen 1 IV-49
Tabel 4.28 Anova untuk pengujian eksperimen 1 IV-50
Tabel 4.29 Data hasil pengujian eksperimen 1 IV-51
Tabel 4.30 Hasil penjumlahan data hasil pengujian eksperimen 2 IV-52
Tabel 4.31 Anova untuk pengujian eksperimen 2 IV-53
commit to user
xvi
DAFTAR GAMBAR
Gambar 2.1 Struktur tulang pada tangan manusia II-2
Gambar 2.2 Joint pada tangan manusia II-2
Gambar 2.3 Passive prostheses II-4
Gambar 2.4 Body powered prostheses II-5
Gambar 2.5 Myoelectric devices II-6
Gambar 2.6 Prosthetic tangan kosmetik II-7
Gambar 2.7 Prosthetic tangan fungsional jenis prehensor dan hook II-7
Gambar 2.8 Prosthetic tangan kosmetik dan fungsional II-7
Gambar 2.9 Desain prosthetic jari tangan dengan sistem cable II-23
Gambar 2.10 Desain prosthetic jari tangan dengan sistem bar II-24
Gambar 3.1 Metodologi penelitian III-1
Gambar 4.1 (a) Struktur tangan manusia dan (b) struktur prosthetic
tangan IV-2
Gambar 4.2 Desain prosthetic jari tangan sistem cross cable IV-3
Gambar 4.3 Desain prosthetic jari tangan sistem cross bar IV-4
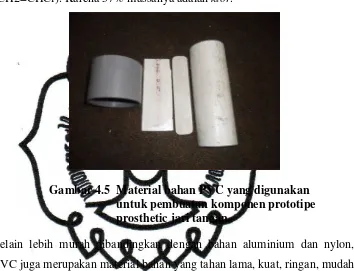
Gambar 4.4 Material bahan PVC yang digunakan untuk pembuatan
komponen prototipe prosthetic jari tangan IV-10
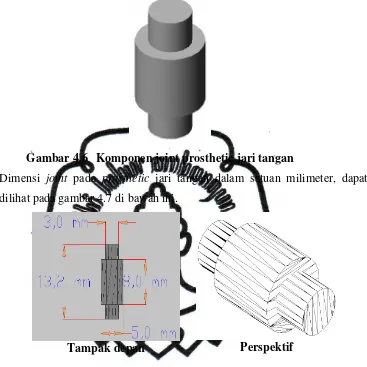
Gambar 4.5 Komponen joint prosthetic jari tangan IV-11
Gambar 4.6 Dimensi komponen joint prosthetic jari tangan IV-11
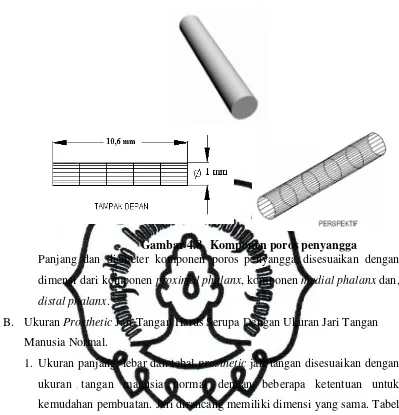
Gambar 4.7 Komponen poros penyangga IV-12
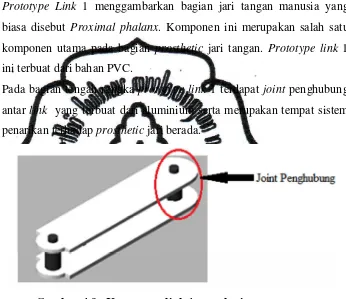
Gambar 4.8 Komponen link 1 prosthetic jari tangan IV-13
Gambar 4.9 Dimensi link 1 prosthetic jari tangan IV-14
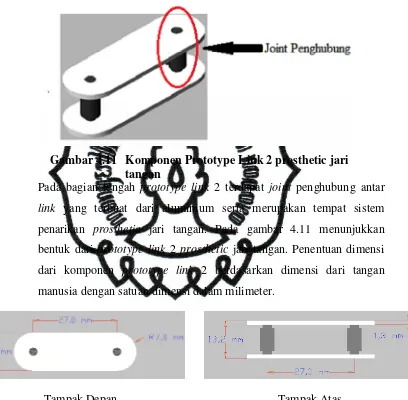
Gambar 4.10 Komponen Prototype Link 2 prosthetic jari tangan IV-14
Gambar 4.11 Dimensi link 2 prosthetic jari tangan IV-14
Gambar 4.12 Komponen Prototype Link 3 prosthetic jari tangan IV-15
Gambar 4.13 Dimensi link 3 prosthetic jari tangan IV-15
Gambar 4.14 Komponen prototype base prosthetic jari tangan sistem
cable IV-16
Gambar 4.15 Dimensi base prosthetic jari tangan sistem cable IV-16
Gambar 4.16 Desain prosthetic jari tangan dengan sistem cable IV-17
commit to user
xvii
Gambar 4.18 Proses assembling pada bagian prosthetic jari tangan
prosthetic jari tangan sistem cable IV-20
Gambar 4.19 (a). Desain prosthetic jari tangan (sistem cable),
(b). prototype prosthetic jari tangan sistem cable IV-20
Gambar 4.20 Proses assembling pada bagian prosthetic jari tangan
prosthetic jari tangan sistem cross bar IV-23
Gambar 4.21 (a). Desain prosthetic jari tangan (sistem bar),
(b). prototype prosthetic jari tangan sistem bar IV-23
Gambar 4.22 Plot residual data gaya tarik dinamis IV-35
Gambar 4.23 Plot residual data gaya tarik dinamis IV-41
commit to user
I-1
BAB I
PENDAHULUAN
Ketiadaan salah satu alat gerak menjadi masalah khusus bagi seorang
manusia, akibatnya fungsi yang seharusnya dijalankan oleh organ tubuh tersebut
menjadi terganggu dan tidak dapat dilaksanakan, sehingga muncul alat bantu
pengganti bagian tubuh yang hilang yang disebut dengan prosthetic.
1.1 LATAR BELAKANG
Desain, pengembangan dan analisis prosthetic tangan robot masih menjadi
tema penelitian aktif di seluruh dunia setelah lebih dari dua puluh tahun sejak
model pertama diumumkan pada awal tahun 1980-an (Saliba dan axiax, 2007).
Perkembangan prosthetic tangan manusia pada umumnya sangat dibantu oleh
studi anatomi tubuh manusia. Pendekatan yang terbaik dalam merancang
prosthetic tangan adalah dengan mengadopsi bentuk serta sistem kerja yang ada
pada tangan manusia. Persyaratan mendasar dalam perancangan prosthetic tangan
adalah dengan menggunakan data antropometri tubuh manusia sebagai acuan
perancangan, sehingga prosthetic tangan diharapkan dapat disesuaikan dengan
bagian tubuh manusia, baik dalam aspek fisik maupun aspek fungsional pada
pengaplikasiannya (Zollo et al, 2007). Persyaratan umum dalam perancangan
prosthetic jari tangan manusia diantaranya, prosthetic jari tangan manusia
diharapkan memiliki berat yang ringan, namun cukup kuat. Selain itu, jari-jari
prosthetic tangan manusia memungkinkan untuk berada pada kondisi diam
ataupun saat melakukan gerakan. Ukuran prosthetic jari tangan manusia harus
serupa dengan ukuran jari tangan manusia normal, baik dalam ukuran panjang dan
ukuran lebarnya. Persyaratan umum yang terakhir yaitu, prosthetic jari tangan
manusia harus mampu mengirimkan kekuatan tertentu untuk melakukan gerakan
(Dechev, et al, 1999).
Prosthetic tangan manusia sebagai alat fungsional diharapkan mampu
menjalankan enam model gerakan dasar tangan manusia, yaitu cylindrical, lateral,
palmar, hook, tip, dan spherical. Enam model gerakan tersebut sangat dipengaruhi
oleh desain prosthetic jari tangan manusia, mekanisme sistem penggerak yang
commit to user
I-2
pada sistem penggerak (Martel dan Gini, 2007). Aspek fungsional prosthetic
tangan manusia yang paling penting adalah kemudahan dalam pengoperasiannya
dan memiliki gaya tarik yang rendah ketika digunakan dalam melakukan
penggenggaman objek benda (Wilmer Group, 2000).
Sanjaya (2009), dalam penelitiannya mendefinisikan gaya tarik pada
prosthetic tangan manusia merupakan gaya yang terjadi pada sistem gerak agar
prosthetic tangan manusia tersebut dapat bekerja, gaya tarik tersebut terdiri dari
gaya tarik dinamis dan gaya tarik statis. Gaya tarik dinamis adalah gaya yang
dibutuhkan untuk menggerakkan jari-jari prosthetic tangan manusia, sedangkan
gaya tarik statis merupakan gaya yang dibutuhkan untuk menahan objek benda
yang dipegang.
Terdapat dua mekanisme sistem penggerak pada desain prosthetic jari
tangan manusia yang digunakan dalam penelitian-penelitian yang telah dilakukan
sebelumnya, mekanisme sistem penggerak tersebut adalah sistem penggerak cross
cable dan cross bar. Sistem penggerak cross cable adalah sistem penggerak pada
desain prosthetic jari tangan manusia dengan menggunakan penarik berupa kabel
yang dirangkaikan pada desain prosthetic, sedangkan sistem penggerak cross bar
adalah sistem penggerak pada desain prosthetic jari tangan manusia dengan
menggunakan bar atau dapat juga disebut rigid link yang kemudian disusun dalam
desain prosthetic jari tangan manusia.
Beberapa penelitian dengan tema prosthetic jari tangan manusia telah
dilakukan, diantaranya adalah Saliba dan Axiax (2007), melakukan penelitian
mengenai desain prosthetic jari tangan manusia dengan menggunakan mekanisme
sistem penggerak cross cable. Desain ini mengadopsi struktur jari tangan manusia
yang terdiri dari tiga segmen ruas jari yaitu proximal phalanx, medial phalanx,
serta distal phalanx. Komponen cable dirangkaikan pada desain prosthetic jari
tangan tepatnya pada ujung komponen distal phalanx, kemudian komponen cable
dihubungkan pada komponen palm.Pada saat cable ditarik, maka cable menegang
sehingga komponen distal phalanx akan tertarik kemudian bergerak mengikuti
arah tarikan dari cable hingga membentuk gerakan flexi atau gerak jari menutup.
Beberapa kekurangan yang ada pada desain ini adalah belum memiliki sistem
commit to user
I-3
tarik untuk gerakan flexi atau gerak jari menutup. Penelitian yang selanjutnya
dilakukan oleh Dechev, et al (1999), desain prosthetic jari tangan sistem gerak
cross bar terdiri dari beberapa komponen bar atau dapat juga disebut rigid link
yang dirangkai dengan menggunakan komponen joint sebagai penghubung antar
bar. Sistem kerja pada desain prosthetic jari tangan sistem gerak cross bar
terletak pada rangkaian rigid link yang terhubung satu sama lain, sehingga saat
terjadi pergerakan pada salah satu segmen, maka rigid link yang ada pada tiap
segmen akan saling mendorong ataupun menarik. Beberapa kekurangan yang ada
pada desain ini adalah, pergerakan rigid link yang kaku mengakibatkan tidak
sempurnanya gerakan menutup dan membuka pada prosthetic jari tangan. Selain
itu dari aspek fisik desain prosthetic jari tangan tersebut kurang mencerminkan
bentuk tangan manusia, karena desain ini belum mengadopsi struktur jari tangan
manusia yang terdiri dari tiga segmen ruas jari yaitu proximal phalanx, medial
phalanx, serta distal phalanx.
Sepanjang studi literatur yang telah dilakukan, belum ditemukan publikasi
karya ilmiah yang memberikan alternatif solusi terhadap kekurangan yang
terdapat pada kedua desain tersebut. Untuk memperoleh gerakan flexi dan extensi
pada prosthetic jari tangan manusia sistem cross cable, perlu dilakukan perbaikan
terhadap jalur rangkaian cable. Perbaikan yang perlu dilakukan yaitu dengan
menambahkan jalur rangkaian cable untuk gerakan prosthetic jari tangan manusia
membuka. Kedua rangkaian cable dipasang bersilangan dengan memanfaatkan
komponen joint sebagai pembatas diantara kedua rangkaian cable tersebut. Selain
itu perlu ditambahkan pula komponen poros penyangga sebagai tempat tautan
cable antar phalanx, sehingga prosthetic jari tangan manusia sistem cable dapat
bergerak membuka atau menutup. Sedangkan untuk mengatasi permasalahan yang
terdapat pada prosthetic jari tangan manusia sistem cross bar yaitu dengan
melakukan perbaikan desain bar atau rigid link yang dapat diterapkan dan
disesuaikan dengan bentuk dan ukuran dari link prosthetic jari tangan manusia.
Berdasarkan alasan tersebut maka dalam penelitian kali ini, perlu
dilakukan perancangan prototype prosthetic jari tangan manusia yang mengadopsi
struktur jari tangan manusia dengan mengaplikasikan mekanisme cross bar dan
commit to user
I-4
terhadap kedua prototype prosthetic jari tangan manusia tersebut dengan
melakukan eksperimen untuk mencari gaya tarik dinamis terkecil yang dibutuhkan
oleh kedua prototype prosthetic jari tangan manusia dalam melakukan gerakan
flexi. Hasil dari penelitian ini diharapkan dapat dijadikan rekomendasi
pengembangan penelitian tentang prosthetic tangan manusia fungsional
selanjutnya.
1.2 PERUMUSAN MASALAH
Berdasarkan latar belakang masalah di atas, maka permasalahan dalam
penelitian ini adalah “bagaimana merancang prototype prosthetic jari tangan
manusia yang mengadopsi struktur jari tangan manusia dengan mekanisme sistem
penggerak cross bar dan cross cable, kemudian melakukan eksperimen untuk
mencari gaya tarik dinamis terkecil yang dibutuhkan oleh kedua prototype
prosthetic jari tangan manusia dalam melakukan gerakan flexi”.
1.3 TUJUAN PENELITIAN
Tujuan yang ingin dicapai dalam penelitian tangan prosthetic, yaitu:
1. Membuat dua prototype rancangan prosthetic jari tangan manusia yang
masing-masing mengaplikasikan mekanisme sistem penggerak cross cable
dan sistem cross bar.
2. Mendapatkan besar gaya tarik dinamis yang dibutuhkan oleh kedua prototype
rancangan prosthetic jari tangan manusia yang masing-masing
mengaplikasikan mekanisme sistem penggerak cross cable dan sistem cross
bar, serta membandingkan besarnya gaya tarik dinamis prosthetic jari tangan
manusia yang digunakan untuk melakukan gerakan flexi.
1.4 MANFAAT PENELITIAN
Hasil eksperimen nantinya dapat melengkapi penelitian tentang prosthetic
tangan manusia fungsional yang telah ada, serta memberikan arahan rekomendasi
pengembangan penelitian tentang prosthetic tangan manusia fungsional
commit to user
I-5
1.5 BATASAN MASALAH
Batasan masalah dari penelitian mengenai studi kajian pengembangan
prosthetic jari tangan manusia, sebagai berikut:
1. Kriteria yang digunakan dalam membandingkan dua desain prosthetic jari
tangan manusia dengan dua jenis mekanisme sistem penggerak adalah besar
gaya tarik dinamis pada prosthetic jari tangan manusia yang digunakan untuk
melakukan gerakan flexi.
2. Pengukuran gaya tarik dinamis prosthetic jari tangan manusia, dilakukan
hanya terhadap prosthetic jari telunjuk.
3. Dimensi prosthetic jari tangan manusia menggunakan ukuran tangan manusia
berumur 21 tahun mengacu pada penelitian Saliba dan Axiax (2007).
4. Gaya tarik dinamis yang dihasilkan hanya berlaku terhadap bahan pembuat
prosthetic jari tangan manusia pada penelitian ini.
1.6 ASUMSI PENELITIAN
Dalam pengukuran aktual gaya tarik dinamis dan kecepatan respon
prosthetic jari tangan manusia dilakukan tanpa memperhitungkan gaya gesek yang
terdapat pada alat bantu sistem penarik.
1.7 SISTEMATIKA PENULISAN
Sistematika penulisan dibuat agar dapat memudahkan pembahasan
penyelesaian masalah dalam penelitian ini. Penjelasan mengenai sistematika
penulisan, dapat dijelaskan pada sub bab berikut ini.
BAB I : PENDAHULUAN
Bab ini menguraikan berbagai hal mengenai latar belakang penelitian,
perumusan masalah, tujuan penelitian, manfaat penelitian, batasan
masalah, asumsi-asumsi dan sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Bab ini menguraikan teori-teori yang dipakai untuk mendukung
commit to user
I-6
Tinjauan pustaka diambil dari berbagai sumber yang berkaitan
langsung dengan permasalahan yang dibahas dalam penelitian.
BAB III : METODOLOGI PENELITIAN
Bab ini berisi tahapan yang dilalui dalam penyelesaian masalah secara
umum yang berupa gambaran terstruktur dalam bentuk flowchart sesuai
dengan permasalahan yang ada mulai dari studi pendahuluan,
pengumpulan data sampai dengan pengolahan data dan analisis.
BAB IV : PENGUMPULAN DAN PENGOLAHAN DATA
Bab ini berisi data-data yang diperlukan untuk menyelesaikan masalah,
kemudian dilakukan pengolahan data secara bertahap.
BAB V : ANALISIS DAN INTERPRETASI HASIL
Bab ini memuat uraian analisis dan intepretasi dari hasil pengolahan
data yang telah dilakukan
BAB VI : KESIMPULAN DAN SARAN
Bab ini menguraikan target pencapaian dari tujuan penelitian dan
kesimpulan yang diperoleh dari pembahasan masalah. Bab ini juga
commit to user
II-1
BAB II
TINJAUAN PUSTAKA
Bab ini menguraikan teori-teori yang diperlukan dalam mendukung
penelitian. Bagian pertama bab ini membahas tentang anatomi dan gerakan tangan
manusia untuk mengetahui prinsip dan fungsi dasar tangan manusia. Pengetahuan
mengenai pengembangan prosthetic tangan diperlukan guna menunjang
pembahasan masalah. Sedangkan pengetahuan mengenai konsep gaya dan pegas
diperlukan dalam proses pelaksanaan eksperimen. Teori-teori yang berkaitan
dengan konsep dasar desain eksperimen faktorial dan Anova diperlukan dalam
proses pengolahan data dan analisa.
2.1TANGAN MANUSIA
Tangan manusia merupakan salah satu anggota gerak tubuh manusia yang
penting dalam melakukan aktivitas sehari-hari. Tangan manusia berfungsi sebagai
alat penyeimbang dan pendukung tubuh (Tosberg, 1962).
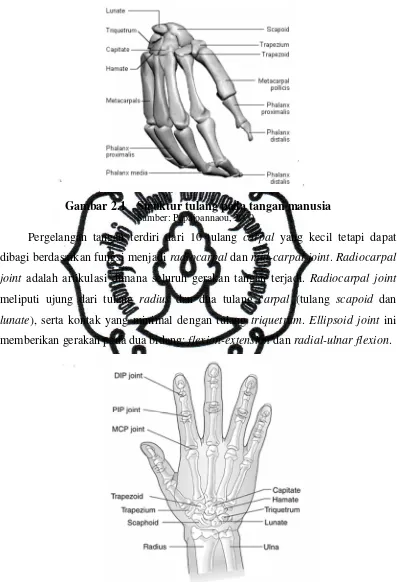
2.1.1 Anatomi tangan manusia
Struktur penyusun tulang telapak tangan manusia terdiri dari banyak tulang
kecil yang disebut dengan bagian carpal, bagian metacarpal, dan bagian phalanx.
Tulang pada telapak tangan orang normal terdiri dari 27 tulang, yaitu delapan
tulang carpal, lima tulang metacarpal, dan 14 tulang phalanges. Pada bagian
tulang carpal, terdapat tulang-tulang kecil yang menyusun bagian tersebut, yaitu
tulang lunate, tulang triquetrum, tulang capitates, tulang scapoid, tulang
trapezium, dan tulang trapezoid. Pada bagian metacarpal, terdiri dari tulang
metacarpal untuk empat jari (jari telunjuk, jari tengah, jari manis, dan jari
kelingking) serta tulang metacarpal pollicis yang menghubungkan antara tulang
trapezium pada bagian carpal dengan phalanx distalis pada tulang ibu jari. Pada
bagian jari (jari telunjuk, jari tengah, jari manis, dan jari kelingking), terdapat tiga
tulang kecil yang menyusunnya, yaitu tulang phalanx proximalis, phalanx media,
dan phalanx distalis. Sedangkan pada ibu jari, komponen penyusun tulang jari
terdiri dari phalanx proximalis dan phalanx distalis. Struktur tulang pada tangan
commit to user
II-2
Gambar 2.1 Struktur tulang pada tangan manusia
Sumber: Papaioannaou, 2000
Pergelangan tangan terdiri dari 10 tulang carpal yang kecil tetapi dapat
dibagi berdasarkan fungsi menjadi radiocarpal dan mid-carpal joint. Radiocarpal
joint adalah artikulasi dimana seluruh gerakan tangan terjadi. Radiocarpal joint
meliputi ujung dari tulang radius dan dua tulang carpal (tulang scapoid dan
lunate), serta kontak yang minimal dengan tulang triquetrum. Ellipsoid joint ini
memberikan gerakan pada dua bidang: flexion-extension dan radial-ulnar flexion.
Gambar 2.2 Joint pada tangan manusia
commit to user
II-3
Pada tulang carpal terdapat dua baris utama, yaitu baris proximal dan baris
distal. Baris proximal terdiri dari tiga tulang carpal yang berperan dalam fungsi
joint dari pergelangan tangan (lunate, scaphoid, dan triquetrum) dan tulang
pisiform yang terdapat pada bagian tengah tangan. Pada baris distal, juga terdapat
empat tulang carpal, yaitu trapezium, trapezoid, capitates, dan hamate. Artikulasi
antara dua baris carpal disebut midcarpal joint, dan artikulasi antara sepasang
tulang carpal disebut intercarpal joint. Baris proximal lebih mudah bergerak
daripada baris distal.
Artikulasi carpometacarpal joint (CMC) menghubungkan tulang carpal
dengan masing-masing jari tangan melalui metacarpal. Masing-masing
metacarpal dan phalanx juga disebut sebagai sebuah ray. Terdapat beberapa
jumlah tulang dari ibu jari sampai jari kelingking, dengan ibu jari sebagai ray
pertama dan jari kelingking sebagai ray kelima. Artikulasi CMC adalah sebuah
joint yang memberikan gerakan yang lebih banyak pada ibu jari dan gerakan yang
lebih sedikit pada jari lainnya. CMC joint pada ray yang pertama (ibu jari), adalah
sebuah saddle joint yang terdiri dari artikulasi antara trapezium.
Metacarpophalangeal joint (MCP) adalah joint yang menghubungkan
antara metacarpal dengan tulang phalanges. MCP joint memungkinkan gerakan
pada dua bidang: flexion-extension dan abduction-adduction. Masing-masing jari
memiliki dua interphalangeal joint (IP), yaitu proximal interphalangeal (PIP) dan
distal interphalangeal (DIP). Ibu jari hanya memiliki satu IP joint karena hanya
memiliki dua phalanx, yaitu proximal dan distal phalanx (Hamill, 2009).
2.2PROSTHETIC TANGAN
Prosthetic merupakan alat bantu pengganti bagian tubuh manusia yang
hilang. Bentuk dan fungsi prosthetic disesuaikan dengan bagian tubuh yang
hilang. Penjelasan mengenai prosthetic tangan dapat dilihat pada sub bab, di
bawah ini.
2.2.1 Jenis Prosthetic Tangan
Ada beberapa jenis prosthetic tangan yang telah didesain selama ini.
Beberapa dari desain tangan prosthetic tersebut awalnya hanya berfungsi sebagai
commit to user
II-4
terbatas (Torsberg, 1962). Secara umum ada tiga kategori dalam prosthetic tangan,
yaitu passive prostheses, body powered prostheses, dan externally powered
prostheses/myoelectric devices (Herr, et.al, 2001).
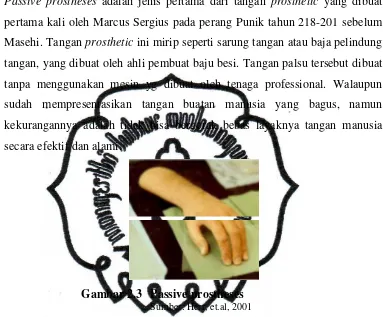
1. Passive prostheses,
Passive prostheses adalah jenis pertama dari tangan prosthetic yang dibuat
pertama kali oleh Marcus Sergius pada perang Punik tahun 218-201 sebelum
Masehi. Tangan prosthetic ini mirip seperti sarung tangan atau baja pelindung
tangan, yang dibuat oleh ahli pembuat baju besi. Tangan palsu tersebut dibuat
tanpa menggunakan mesin yg dibuat oleh tenaga professional. Walaupun
sudah mempresentasikan tangan buatan manusia yang bagus, namun
kekurangannya adalah tidak bisa bergerak bebas layaknya tangan manusia
secara efektif dan alami.
Gambar 2.3 Passive prostheses
Sumber: Herr, et.al, 2001
Keuntungan dari passive prostheses adalah memiliki nilai kosmetik yang
tinggi, memiliki berat yang relatif ringan, pemeliharaan yang relatif mudah,
dan harganya yang murah.
2. Body powered prostheses,
Body powered prostheses ditemukan tahun 1812 ketika Peter Baliff, seorang
dokter gigi asal Berlin, menemukan sebuah “terminal device” yang
dioperasikan dengan mengikatkan tangan prosthetic dengan tubuh pasien.
Body powered prostheses dioperasikan dengan mengikatkan tubuh dengan
pundak dan dijalankan dengan biscapula adduction (melingkar di punggung
dan pundak). Tangan prosthetic ini memungkinkan untuk bisa dioperasikan
karena ada alat untuk ‘membalikkan lengan’ atau proprosepsi untuk
mengarahkan dimana alat tersebut diposisikan untuk “bolak balik” dan untuk
commit to user
II-5
Namun masalahnya untuk menjalankan alat ini harus menggunakan tali
pengikat. Untuk mengenakan dan mengangkat peralatan ini agak sulit karena
mengganggu pakaian yg dikenakan. Jadi penggunaan alat ini kurang efektif
karena juga sulit untuk digerakkan.
Gambar 2.4 Body powered prostheses
Sumber: Herr, et.al, 2001
Sistem kabel pada body powered prostheses ada dua macam, yaitu voluntary
open dan voluntary closing (Torsberg, 1962). Pada sistem voluntary open,
kondisi awal jari tangan prosthetic dalam keadaan menutup, kemudian kabel
pada sistem tangan prosthetic ditarik sehingga jari tangan prosthetic
membuka. Sedangkan pada sistem voluntary closing, kondisi awal jari tangan
prosthetic dalam keadaan membuka, kemudian kabel pada sistem tangan
prosthetic ditarik sehingga jari tangan prosthetic menutup.
Keuntungan dari body powered prostheses adalah memiliki tingkat reliabilitas
yang tinggi, bisa digunakan dalam berbagai kondisi lingkungan (basah, kotor,
dan berdebu), dan memiliki berat yang ringan.
3. Myoelectric devices,
Myoelectric devices adalah tangan prosthetic listrik yang ditemukan tahun
1948 oleh Rehold Reiner. Jenis ini menggunakan sensor untuk mendeteksi,
biasanya tangan prosthetic ini menggunakan sistem penerimaan syaraf melalui
elektromiografik untuk mengoperasikan motor elektrik di dalam tangan
prosthetic tersebut. Dan bisa juga untuk mengoperasikan komponen
pergelangan tangan dan siku. Aktifitas Elektromiografik (EMG) sebenarnya
commit to user
II-6
selama proses pergerakan otot. Dengan menggunakan permukaan elektroda,
dapat memungkinkan untuk mengukur perbedaan potensi terhadap kulit
disekitar daerah teramputasi.
Gambar 2.5 Myoelectric devices
Sumber: Herr, et.al, 2001
Keuntungan dari myoelectric devices adalah mampu mengkombinasikan dua
fungsi utama tangan prosthetic (fungsi kosmetik dan alat fungsional), mampu
digunakan dalam berbagai macam posisi, dan mudah dalam pengoperasian.
2.2.2 Perkembangan Prosthetic Tangan
Pada dasarnya perkembangan tangan prosthetic dapat dibagi menjadi tiga,
yaitu perkembangan prosthetic kosmetik, perkembangan prosthetic fungsional,
dan perkembangan prosthetic gabungan dari keduanya. Perkembangan telapak
tangan prosthetic kosmetik terus menerus dilakukan hingga saat ini, untuk
memenuhi tujuan utama prosthtetic, yaitu menyediakan alat pengganti bagian
tubuh yang hilang dan memenuhi kebutuhan pasien beserta fungsinya.
Prosthetic kosmetik pertama kali ditemukan pada tahun 2500 sebelum
masehi dengan penemuan jari kaki palsu. Kemudian pada saat perang Punic di
tahun 218-201 sebelum Masehi, Markus Sergius membuat prosthetic kosmetik
commit to user
II-7
Gambar 2.6 Prosthetic tangan kosmetik
Sumber: Herr, et.al, 2001
Prosthetic fungsional pertama kali dibuat oleh Gotz Von Berlichingen pada
tahun 1508. Bentuk dari prosthetic tangan ini tidak menyerupai tangan manusia,
meskipun dapat menjalankan beberapa fungsi tangan. Contoh prosthetic tangan
fungsional adalah tangan jenis prehensor dan hook.
Gambar 2.7 Prosthetic tangan fungsional jenis prehensor dan hook
Sumber: Herr, et.al, 2001
Prosthetic tangan kosmetik dan fungsional memiliki bentuk yang sudah
menyerupai tangan manusia dan mampu menjalankan enam dasar gerakan
pemegangan meliputi gerakan spherical, cylindrical, hook, tip, lateral, dan
palmar. Perkembangan prosthetic tangan kosmetik dan fungsional di luar negeri
jauh lebih maju dibandingkan prosthetic tangan buatan Indonesia saat ini. Jerman
telah mengembangkan prosthetic tangan yang dikombinasikan dengan teknologi
robot (humanoid) sejak tahun1980-an hingga saat ini.
Gambar 2.8 Prosthetic tangan kosmetik dan fungsional
commit to user
II-8 2.3KONSEP DASAR PROTOTYPE
Kajian mengenai pengembangan suatu produk memerlukan konsep dasar
yang berkaitan dengan prototype. Berikut ini dijelaskan lebih jauh mengenai
pengertian dari prototype, kegunaan prototype, dan prinsip dasar prototype.
2.3.1 Esensi Dasar dan Tipe Prototype
Definisi prototype adalah sebuah penaksiran produk melalui satu atau lebih
dimensi yang menjadi perhatian (Ulrich and Epinger, 2001). Meskipun kamus
mendefinisikan prototype hanya sebagai sebuah kata benda, dalam praktek
pengembangan produk, kata tersebut digunakan sebagai kata benda, kata kerja,
dan kata sifat. Berdasarkan definisi tersebut, setiap wujud yang memperlihatkan
sedikitnya satu aspek produk yang menarik bagi tim pengembangan produk dapat
ditampilkan sebagai sebuah prototype.
Prototype dapat diklasifikasikan menjadi dua dimensi. Dimensi pertama
membagi prototype menjadi dua yaitu prototype fisik dan prototype analitik.
Prototype fisik merupakan benda nyata yang dibuat untuk memperkirakan produk.
Aspek-aspek dari produk yang diminati oleh tim pengembangan secara nyata
dibuat menjadi suatu benda untuk pengujian dan percobaan. Prototype analitik
adalah lawan dari prototype fisik yang hanya menampilkan produk yang tidak
nyata, biasanya dalam bentuk matematis. Contoh prototype analitik meliputi
simulasi komputer, model komputer, geometrik tiga dimensi atau dua dimensi,
dan sistem persamaan penulisan pada kertas komputer.
Dimensi kedua juga mengklasifikasikan prototype menjadi dua, yaitu
prototype menyeluruh dan prototype terfokus. Prototype menyeluruh
mengimplementasikan sebagian besar atau semua atribut dari produk. Prototype
menyeluruh diberikan kepada pelanggan untuk mengidentifikasi dari desain
sebelum memutuskan diproduksi. Berlawanan dengan prototype menyeluruh,
prototype terfokus hanya mengimplementasikan satu atau sedikit sekali atribut
produk. Perlu dicatat bahwa prototype terfokus merupakan prototype fisik
maupun analitik, namun untuk produk fisik, prototype menyeluruh pada
commit to user
II-9 2.3.2 Kegunaan Prototype
Terkait proyek pengembangan produk, prototype digunakan untuk tiga
tujuan (Ulrich and Epinger, 2001), yaitu:
1. Pembelajaran, yang mana prototype sering digunakan untuk menjawab dua
tipe pertanyaan “Akankah dapat bekerja ?” dan “Sejauh mana dapat
memenuhi kebutuhan pelanggan?”. Pada saat harus menjawab pertanyaan
tersebut, prototype diperlakukan sebagai alat pembelajaran.
2. Komunikasi, yaitu prototype memperkaya komunikasi dengan manajemen
puncak, penjual, mitra, pelanggan dan investor. Hal ini benar karena sebuah
gambaran, alat, tampilan tiga dimensi dari produk lebih mudah dimengerti
daripada sebuah penggambaran verbal, bahkan sebuah sketsa produk
sekalipun.
3. Penggabungan, yang mana prototype digunakan untuk memastikan bahwa
komponen-komponen dan subsistem-subsistem dari produk bekerja bersamaan
seperti yang diharapkan. Prototype fisik menyeluruh paling efektif sebagai
alat penggabung dalam proyek pengembangan produk karena prototype ini
membutuhkan perakitan dan keberhubungan fisik dari seluruh bagian dan
yang membentuk sebuah produk.
2.3.3 Prinsip Prototype
Beberapa prinsip berguna sebagai pemandu keputusan tentang prototype
selama pengembangan produk. Prinsip-prinsip ini menunjukkan tentang
keputusan-keputusan terhadap tipe prototype mana yang harus dibuat (Ulrich and
Epinger, 2001). Penjelasan mengenai prinsip pengembangan prototype, yaitu:
1. Prototype analitik umumnya lebih fleksibel dibandingkan prototype fisik.
Prototype analitik merupakan perkiraan matematis dari produk, maka secara
umum akan mengandung beberapa parameter yang bervariasi untuk
menampilkan rancangan alternatif. Mengubah parameter dalam prototype
analitik lebih mudah dibandingkan mengubah sebuah atribut prototype fisik,
selain itu prototype analitik mengijinkan perubahan yang besar. Untuk alasan
commit to user
II-10
2. Prototype fisik dibutuhkan untuk menemukan fenomena yang tidak diduga.
Seringkali prototype fisik tidak relevan pada produk akhir dan muncul
pengganggu selama pengujian prototype fisik, namun dari beberapa hal yang
ditemukan secara kebetulan juga tampak pada produk akhir. Pada kasus ini,
prototype fisik dapat dimanfaatkan sebagai alat untuk mendeteksi fenomena
yang mengganggu dan tidak dapat diduga yang mungkin timbul pada produk
akhir. Sebaliknya, pada rototype analitik tidak pernah dapat mengungkapkan
fenomena yang bukan merupakan bagian model analitik pokok dari prototype.
Untuk alasan ini setidaknya satu prototype fisik hampir selalu dibuat dalam
usaha pengembangan produk.
Sebuah prototype dapat mengurangi resiko iterasi yang merugikan.
Keuntungan yang dapat diperkirakan dari prototype dalam mengurangi resiko
harus ditimbang dengan waktu dan uang yang dibutuhkan untuk membuat dan
mengevaluasi prototype. Produk-produk dengan resiko tinggi atau yang tidak
pasti, produk dengan biaya kegagalan tinggi, teknologi baru, atau produk yang
bersifat revolusioner, akan diuntungkan dengan adanya prototype. Sebaliknya,
produk dengan biaya kegagalan rendah dan dengan teknologi yang sudah ada
hanya memperoleh keuntungan pengurangan resiko yang kecil dari pembuatan
prototype ini.
2.4GAYA
Eksperimen pada tangan prosthetic memerlukan konsep dasar mengenai
gaya. Gaya (force) dinyatakan dalam percepatan yang dialami oleh suatu benda
standar bila diletakkan dalam lingkungan tertentu yang sesuai (Physics, 1999).
Gaya dapat menyebabkan suatu benda bergerak dengan arah dan percepatan
tertentu. Hukum Newton berhubungan erat dengan adanya gaya pada suatu benda.
a. Hukum Newton pertama,
Hukum Newton pertama muncul sebagai hasil jawaban pemikiran Galileo
mengenai masalah gerak dan penyebabnya. Bunyi dari pernyataan hukum
Newton pertama adalah “setiap benda akan tetap berada dalam keadaan diam
atau bergerak lurus beraturan kecuali jika ia dipaksa untuk mengubah
commit to user
II-11
hukum Newton pertama ini memberikan pernyataan tentang kerangka acuan
pada suatu benda.
b. Hukum Newton kedua,
Hukum Newton kedua berhubungan dengan gaya dan percepatan suatu benda.
Suatu gaya total yang bekerja pada sebuah benda dapat membuat kelajuan
benda tersebut bertambah, atau jika gaya total berlawanan arah dengan gerak,
maka gaya itu akan mengurangi kelajuan. Bunyi dari pernyataan hukum
Newton yang kedua adalah “percepatan sebuah benda berbanding lurus
dengan gaya total yang bekerja padanya dan berbanding terbalik dengan
massanya. Arah percepatan searah dengan gaya total yang diberikan”.
Pernyataan tersebut dapat disimbolkan sebagai:
m F
a=
å
………persamaan 2.1dimana a menyatakan percepatan, m untuk massa dan ΣF untuk gaya total. F
menyatakan gaya, sehingga ΣF bermakna jumlah vektor dari semua gaya yang
bekerja pada benda.
c. Hukum Newton ketiga,
Pernyataan hukum Newton ketiga dikembangkan dari hukum Newton kedua,
yaitu berdasarkan pengamatan bahwa suatu gaya yang diterapkan pada setiap
benda adalah gaya yang diberikan oleh benda lain. Bunyi dari pernyataan
hukum Newton yang ketiga adalah “kapanpun sebuah benda melakukan gaya
pada benda kedua, benda yang kedua melakukan sebuah gaya yang sama dan
berlawanan pada yang pertama”. Hukum ini kadang-kadang berbunyi sebagai
“terhadap setiap aksi ada suatu reaksi yang sama dan berlawanan”. Hal
tersebut berlaku secara sempurna, tapi untuk menghindari kesalahan akan
sangat penting untuk mengingat bahwa gaya aksi dan gaya reaksi bekerja pada
benda yang berbeda.
2.5DESAIN EKSPERIMEN
Desain eksperimen merupakan langkah-langkah lengkap yang perlu diambil
commit to user
II-12
dapat diperoleh sehingga akan membawa kepada analisis objektif dan kesimpulan
yang berlaku untuk persoalan yang sedang dibahas. (Sudjana, 1995).
Beberapa istilah atau pengertian yang perlu diketahui dalam desain
eksperimen (Sudjana, 1985 ; Montgomery, 1997):
a. Experimental unit (unit eksperimen)
Objek eksperimen dimana nilai-nilai variabel respon diukur.
b. Variabel respon(effect)
Disebut juga dependent variable atau ukuran performansi, yaitu output yang
ingin diukur dalam eksperimen.
c. Faktor
Disebut juga independent variable atau variabel bebas, yaitu input yang
nilainya akan diubah-ubah dalam eksperimen.
d. Level (taraf)
Merupakan nilai-nilai atau klasifikasi-klasifikasi dari sebuah faktor. Taraf
(levels) faktor dinyatakan dengan bilangan 1, 2, 3 dan seterusnya. Misalkan
dalam sebuah penelitian terdapat faktor-faktor :
a = jenis kelamin
b = cara mengajar
Selanjutnya taraf untuk faktor a adalah 1 menyatakan laki-laki, 2 menyatakan
perempuan (a1 , a2). Bila cara mengajar ada tiga, maka dituliskan dengan b1,
b2, dan b3.
e. Treatment (perlakuan)
Sekumpulan kondisi eksperimen yang akan digunakan terhadap unit
eksperimen dalam ruang lingkup desain yang dipilih. Perlakuan merupakan
kombinasi level-level dari seluruh faktor yang ingin diuji dalam eksperimen.
f. Replikasi
Pengulangan eksperimen dasar yang bertujuan untuk menghasilkan taksiran
yang lebih akurat terhadap efek rata-rata suatu faktor ataupun terhadap
kekeliruan eksperimen.
g. Faktor Pembatas/ Blok (Restrictions)
Sering disebut juga sebagai variabel kontrol (dalam Statistik Multivariat).
commit to user
II-13
tidak ingin diuji pengaruhnya oleh eksperimenter karena tidak termasuk ke
dalam tujuan studi.
h. Randomisasi
Yaitu cara mengacak unit-unit eksperimen untuk dialokasikan pada
eksperimen. Metode randomisasi yang dipakai dan cara mengkombinasikan
level-level dari fakor yan berbeda menentukan jenis disain eksperimen yang
akan terbentuk.
i. Kekeliruan eksperimen
Merupakan kegagalan daripada dua unit eksperimen identik yang dikenai
perlakuan untuk memberi hasil yang sama.
Langkah-langkah dalam setiap proyek eksperimen secara garis besar terdiri
atas tiga tahapan, yaitu planning phase, design phase dan analysis phase. (Hicks,
1993).
1. Planning Phase
Tahapan dalam planning phase adalah :
a. Membuat problem statement sejelas-jelasnya.
b. Menentukan variabel bebas (dependent variables), yaitu efek yang ingin
diukur, sering disebut sebagai kriteria atau ukuran performansi.
c. Menentukan independent variables.
d. Menentukan level-level yang akan diuji, tentukan sifatnya, yaitu : · Kualitatif atau kuantitatif ?
· Fixed atau random ?
e. Tentukan cara bagaimana level-level dari beberapa faktor akan
dikombinasikan (khusus untuk eksperimen dua faktor atau lebih).
2. Design Phase
Tahapan dalam design phase adalah :
a. Menentukan jumlah observasi yang diambil.
b. Menentukan urutan eksperimen (urutan pengambilan data).
c. Menentukan metode randomisasi.
d. Menentukan model matematik yang menjelaskan variabel respon.
commit to user
II-14 3. Analysis Phase
Tahapan dalam analysis phase adalah :
a. Pengumpulan dan pemrosesan data.
b. Menghitung nilai statistik-statistik uji yang dipakai.
c. Menginterpretasikan hasil eksperimen.
2.5.1 Factorial Experiment
Eksperimen faktorial digunakan bilamana jumlah faktor yang akan diuji
lebih dari satu. Eksperimen faktorial adalah eksperimen dimana semua (hampir
semua) taraf (levels) sebuah faktor tertentu dikombinasikan dengan semua
(hampir semua) taraf (levels) faktor lainnya yang terdapat dalam eksperimen.
(Sudjana, 1985).
Di dalam eksperimen faktorial, bisa terjadi hasilnya dipengaruhi oleh lebih
dari satu faktor, atau dikatakan terjadi interaksi antar faktor. Secara umum
interaksi didefinisikan sebagai ‘perubahan dalam sebuah faktor mengakibatkan
perubahan nilai respon, yang berbeda pada tiap taraf untuk faktor lainnya, maka
antara kedua faktor itu terdapat interaksi’ (Sudjana, 1985).
Skema umum data sampel untuk desain eksperimen dapat dilihat pada Tabel
commit to user
II-15
Tabel 2.1 Skema umum data sampel eksperimen faktorial menggunakan 3 faktor dan dengan n observasi tiap sel
Faktor C Faktor B Faktor A Jumlah
Adapun model matematik yang digunakan untuk pengujian data eksperimen
yang menggunakan dua faktor dan satu blok adalah sebagai berikut :
Yijkm = m + Ai + Bj + ABij + Ck+ ACik +BCjk + ABCijk+ em(ijk) ……..2.2
dengan;
Yijkm : variabel respon
Ai : faktor desain tangan prosthetic
commit to user
Berdasarkan model persamaan (2.1), maka untuk keperluan Anova dihitung
harga-harga (Hicks, 1993) sebagai berikut :
· Jumlah kuadrat total (SStotal) :
· Jumlah kuadrat nilai pengamatan yang terdapat dalam interaksi taraf ke-ij
commit to user
dengan nilai-nilai perhitungan dalam bentuk diatas adalah sebagaimana tabel 2.3.
Pada kolom terakhir tabel 2.3, untuk menghitung harga F yang digunakan sebagai
alat pengujian statistik, maka perlu diketahui model mana yang diambil. Model
yang dimaksud ditentukan oleh sifat tiap faktor, apakah tetap atau acak. Model
tetap menunjukkan di dalam eksperimen terdapat hanya m buah perlakuan,
sedangkan model acak menunjukkan bahwa dilakukan pengambilan m buah
commit to user
II-18
Tabel 2.2 Anova eksperimen faktorial 3 faktor desain acak sempurna
Sumber
Randomize block design yaitu pemisahan himpunan-himpunan satuan
percobaan yang agak homogen dan kemudian secara acak dikenakan perlakuan
pada satuan-satuan tersebut. Randomize block design digunakan untuk
memperkecil galat percobaan, karena satuan-satuan dalam suatu blok mempunyai
sifat-sifat yang lebih bersamaan daripada diblok yang berlainan. (Walpole dan
Myers, 1995).
Skema umum data sampel untuk desain eksperimen dapat dilihat pada Tabel
2.3 di bawah ini.
Tabel 2.3 Susunan k x b untuk randomize blok design
commit to user
II-19 dengan;
ŷi : rataan pengamatan untuk perlakuan ke i
ŷ.j : rataan pengamatan untuk perlakuan ke j ŷ.. : rataan keseluruhan bk pengamatan
Ti : jumlah pengamatan untuk perlakuan ke i
T..j : jumlah pengamatan dalam blok ke j
T.. : jumlah keseluruhan bk pengamatan
Berdasarkan model, maka untuk keperluan Anova dihitung harga-harga
(Walpole dan Myers, 1995) sebagai berikut :
1) FK (Faktor Koreksi) :
3) Jumlah kuadrat faktor pembebanan (SSA) :
å
Jumla hKuadrat FK ...……... persamaan 2.13
4) Jumlah kuadrat faktor desain prosthetic jari tangan (SSB) :
å
Jumla hKuadrat FK ...……... persamaan 2.14
5) Jumlah kuadrat interaksi antara faktor A dan B (SSAxB) :
FK
Jumla h ...persamaan 2.15
6) Jumlah kuadrat error (SSE) :
commit to user
II-20
Tabel 2.4 Anova randomize block design
Sumber
Apabila menggunakan analisis variansi sebagai alat analisa data eksperimen,
maka seharusnya sebelum data diolah, terlebih dahulu dilakukan uji
asumsi-asumsi Anova berupa uji homogenitas variansi, dan independensi, terhadap data
hasil eksperimen.
1. Uji Normalitas
Untuk memeriksa apakah populasi berdistribusi normal atau tidak, dapat
ditempuh uji normalitas dengan menggunakan metode lilliefors
(kolmogorov-smirnov yang dimodifikasi), atau dengan normalprobability –plot.
Pemilihan uji lilliefors sebagai alat uji normalitas didasarkan oleh :
a. Uji lilliefors adalah uji kolmogorov-smirnov yang telah dimodifikasi dan
secara khusus berguna untuk melakukan uji normalitas bilamana mean dan
variansi tidak diketahui, tetapi merupakan estimasi dari data (sampel). Uji
kolmogorov-smirnov masih bersifat umum karena berguna untuk
membandingkan fungsi distribusi kumulatif data observasi dari sebuah
variabel dengan sebuah distribusi teoritis, yang mungkin bersifat normal,
seragam, poisson, atau exponential.
b. Uji lilliefors sangat tepat digunakan untuk data kontinu, jumlahnya kurang
dari 50 data, dan data tidak disusun dalam bentuk interval (bentuk frekuensi).
Apabila data tidak bersifat seperti di atas maka uji yang tepat untuk digunakan
commit to user
II-21
c. Uji lilliefors terdapat di software SPSS yang akan membantu mempermudah
proses pengujian data sekaligus bisa mengecek hasil perhitungan secara
manual.
Langkah-langkah perhitungan uji lilliefors (Wijaya, 2000) sebagai berikut:
a. Urutkan data dari yang terkecil sampai terbesar.
b. Hitung rata-rata (x) dan standar deviasi (s) data tersebut.
c. Transformasikan data tersebut menjadi nilai baku (z).
(
x x)
szi = i- / ...persamaan 2.19
dimana xi = nilai pengamatan ke-i
x = rata-rata
s = standar deviasi
d. Dari nilai baku (z), tentukan nilai probabilitasnya P(z) berdasarkan sebaran
normal baku, sebagai probabilitas pengamatan. Gunakan tabel standar luas
wilayah di bawah kurva normal, atau dengan bantuan Ms. Excel dengan
f. Tentukan nilai maksimum dari selisih absolut P(z) dan P(x) yaitu
maks | P(z) - P(x)| , sebagai nilai L hitung.
g. Tentukan nilai maksimum dari selisih absolut P(xi-1) dan P(z) yaitu
maks | P(xi-1) - P(z) |
Tahap berikutnya adalah menganalisis apakah data observasi dalam
beberapa kali replikasi berdistribusi normal. Hipotesis yang diajukan adalah :
H0 : data observasi berasal dari populasi yang berdistribusi normal
commit to user
II-22
Taraf nyata yang dipilih a = 0.05, dengan wilayah kritik Lhitung > La(k-1) .
Apabila nilai Lhitung < Ltabel , maka terima H0 dan simpulkan bahwa data
observasi berasal dari populasi yang berdistribusi normal.
2. Uji homogenitas
Uji homogenitas bertujuan menguji apakah variansi error dari tiap level atau
perlakuan bernilai sama. Alat uji yang sering dipakai adalah uji bartlett. Namun
uji bartlett dapat dilakukan setelah uji normalitas terlampaui. Untuk menghindari
adanya kesulitan dalam urutan proses pengolahan, maka alat uji yang dipilih
adalah uji levene test. Uji levene dilakukan dengan menggunakan analisis ragam
terhadap selisih absolut dari setiap nilai pengamatan dalam sampel dengan
rata-rata sampel yang bersangkutan.
Prosedur uji homogenitas levene (Wijaya, 2000) sebagai berikut :
a. Kelompokkan data berdasarkan faktor yang akan diuji.
b. Hitung selisih absolut nilai pengamatan terhadap rata-ratanya pada tiap level.
c. Hitung nilai-nilai berikut ini :
· Faktor Koreksi (FK) =
(
xi)
nNilai-nilai hasil perhitungan di atas dapat dirangkum dalam sebuah daftar
commit to user
II-23
Tabel 2.5 Skema umum daftar analisis ragam uji homogenitas
Sumber
Keragaman Db JK KT F
Faktor f JK(Faktor) JK(Faktor) / db
) (
) (
error KT
faktor KT
Error n-1-f JKE JKE / db
Total n-1 JKT
Sumber : Sudjana, 1985
d. Hipotesis yang diajukan adalah :
H0 : s12 =s22 =s32 =s42 =s52 =s62
H1 : Ragam seluruh level faktor tidak semuanya sama
e. Taraf nyata yang dipilih adalah α = 0.01
f. Wilayah kritik : F > F α (v1 ; v2) atau F > F0.01 (5 ; 168)
3. Uji independensi
Salah satu upaya mencapai sifat independen adalah dengan melakukan
pengacakan terhadap observasi. Namun demikian, jika masalah acak ini diragukan
maka dapat dilakukan pengujian dengan cara memplot residual versus urutan
pengambilan observasinya. Hasil plot tersebut akan memperlihatkan ada tidaknya
pola tertentu. Jika ada pola tertentu, berarti ada korelasi antar residual atau error
tidak independen. Apabila hal tersebut terjadi, berarti pengacakan urutan
eksperimen tidak benar (eksperimen tidak terurut secara acak).
2.6PENELITIAN SEBELUMNYA
Penelitian mengenai pengembangan prosthetic tangan didukung oleh
beberapa penelitian sebelumnya, baik yang dicapai oleh peneliti dalam negeri
maupun penelitian yang dicapai dari luar negeri untuk penelitian dengan kajian
yang sama. Penelitian yang dilakukan ini lebih mengutamakan pada bagaimana
prosthetic tangan kosmetik dapat memenuhi syarat fungsional secara baik dalam
melakukan aktivitas enam model gerakan tangan.
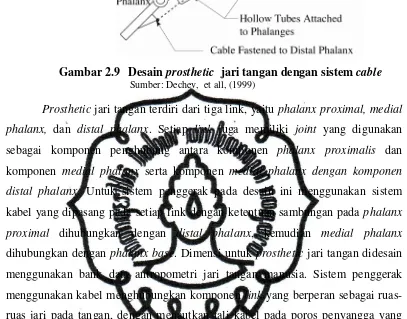
Penelitian desain prosthetic jari tangan (sistem cable) dilakukan Dechev,
et all, (1999). Hasil desain prosthetic jari tangan dapat dilihat pada gambar 2.9
commit to user
II-24
Gambar 2.9 Desain prosthetic jari tangan dengan sistem cable
Sumber: Dechev, et all, (1999)
Prosthetic jari tangan terdiri dari tiga link, yaitu phalanx proximal, medial
phalanx, dan distal phalanx. Setiap link juga memiliki joint yang digunakan
sebagai komponen penghubung antara komponen phalanx proximalis dan
komponen medial phalanx serta komponen medial phalanx dengan komponen
distal phalanx. Untuk sistem penggerak pada desain ini menggunakan sistem
kabel yang dipasang pada setiap link dengan ketentuan sambungan pada phalanx
proximal dihubungkan dengan distal phalanx, kemudian medial phalanx
dihubungkan dengan phalanx base. Dimensi untuk prosthetic jari tangan didesain
menggunakan bank data antropometri jari tangan manusia. Sistem penggerak
menggunakan kabel menghubungkan komponen link yang berperan sebagai
ruas-ruas jari pada tangan, dengan menautkan tali kabel pada poros penyangga yang
terdapat pada setiap ruas jari yang seluruh rangkaian kabelnya terpusat pada tuas
penarik, sehingga pada saat terjadi penarikan kabel pada ujung tuas penarik, maka
kabel yang menghubungkan antara komponen tuas penarik dengan jari akan
menegang dan jari akan membuka atau menutup.
Tabel 2.6 menerangkan mengenai fitur desain prosthetic jari tangan sistem
commit to user
II-25
Tabel 2.6 Fitur desain prosthetic jari tangan sistem cable hasil penelitian Dechev, et all, (1999)
FITUR DESAIN KETERANGAN
Terdiri dari 3 Phalanx: Proximal Phalanx, Medial Phalanx, dan Distal Phalanx
Terdapat komponen joint sebagai penghubung antar Phalanx
Menggunakan pipa silinder aluminium sebagai tempat sistem cable
Penambahan komponen basesebagai pengganti fungsi telapak tangan Menggunakan tali atau cableuntuk sistem penggeraknya
Menerapkan pola 1 jalur lintasan cable untuk gerakan flexi
Komponen Phalanx menggunakan material bahan aluminium Komponen joint menggunakan material bahan aluminium Komponen pipa silinder menggunakan material bahan aluminium Komponen base menggunakan material bahan aluminium Sistem penggerak menggunakan material bahan berupa tali nylon Atribut Desain Dapat melakukan gerakan flexi
Material Bahan Desain Link
Sistem Penggerak
Kelebihan dari sistem ini adalah, dapat menghasilkan gerakan link yang
maksimal pada saat melakukan gerakan pemegangan, hal ini disebabkan karena
kabel yang digunakan bersifat fleksible sehingga tidak ada pembatasan gerak yang
kaku terhadap link. Keterbatasan sistem ini terdapat pada komponen jari yang
tidak stabil dalam menahan kekuatan untuk melakukan gerakan pemegangan, hal
ini dipengaruhi oleh kelenturan kabel yang digunakan, sehingga saat kabel mulai
mengendur, maka regangan pada tali akan menurun.
Penelitian desain prosthetic jari tangan (sistem bar) dilakukan Dechev, et
all, (1999). Hasil desain prosthetic jari tangan dapat dilihat pada gambar 2.10
dibawah ini.
Gambar 2.10 Desain prosthetic jari tangan dengan sistem bar
Sumber: Dechev, et all, (1999)
Prosthetic jari tangan terdiri dari enam link, yaitu untuk link 1, 2, dan 3
adalah phalanx proximal, medial phalanx, dan distal phalanx, sedangkan untuk
commit to user
II-26
sebagai sistem penggerak. Setiap link juga memiliki revolute joint yang
digunakan sebagai komponen penghubung antar link. Dimensi untuk prosthetic
jari tangan didesain menggunakan bank data antropometri jari tangan manusia.
Tabel 2.7 menerangkan mengenai fitur desain prosthetic jari tangan sistem bar
hasil penelitian Dechev, et al, 1999.
Tabel 2.7 Fitur desain prosthetic jari tangan sistem cable hasil penelitian Dechev, et al, 1999
FITUR DESAIN KETERANGAN
Terdiri dari 6 rigid link saling terhubung hingga membentuk suatu rangkaian
Terdapat komponen joint sebagai penghubung antar rigid link
Sistem Penggerak Memanfaatkan rangkaian rigid link untuk mendapatkan gerakan menarik atau mendorong
Komponen rigid link menggunakan material bahan aluminium Komponen joint menggunakan material bahan aluminium Atribut Desain Dapat melakukan gerakan flexi dan extensi
Material Bahan Desain Link
Desain ini banyak digunakan karena dirasa lebih menyerupai desain
tangan manusia normal, yaitu dengan tiga phalanx utama seperti phalanx
proximal, phalanx medial, serta phalanx distal yang mekanismenya sama seperti
ruas-ruas jari tangan pada umunya. Selain itu, dengan sifat kekakuan yang
dimiliki oleh bar tersebut, gerakan yang terjadi cenderung lebih stabil. Namun
desain ini memiliki keterbatasan, dimana pergerakan link yang kaku
mengakibatkan tidak sempurnanya gerakan pemegangan. Selain itu, dari sudut
pandang kosmetik, desain ini kurang mampu mencerminkan bentuk tangan
manusia normal.
Pada tahun 2007, Saliba dan Axiax dari University of Malta, melakukan
penelitian tentang desain prosthetic jari tangan dengan menggunakan mekanisme
sistem penggerak cross cable. Sistem penggerak cross cable terdiri dari dua jalur
cable yang terpasang bersilangan, sistem tersebut berfungsi untuk mendapatkan