KALKULUS I
TEKNIK ELEKTRO
SEMESTER I
UNIVERSITAS MURIA KUDUS
BAB I
SISTEM BILANGAN
1.1 Pendahuluan
Bilangan pertama yang pernah kita jumpai ialah bilangan cacah yang disebut juga
bilangan asli dan bilangan ini ditulis dengan menggunakan numeral (0,1,2…..9). Pada bab ini memuat materi-materi dasar yang diperlukan dalam mempelajari kalkulus. Beberapa materi yang disampaikan hanyalah merupakan review, namun demikian ada pula beberapa yang relative masih baru.
1.1.1 Deskripsi
Pada bab ini akan membahas sistem bilangan dengan materi dasar sebagai berikut; sistem bilangan real, sifat-sifat bilangan real, sistem bilangan desimal, sistem bilangan biner, sistem bilangan oktal, sistem bilangan hexadesimal, relasi utama, garis bilangan, pertidaksamaan, nilai mutlak, selang/interval.
1.1.2 Manfaat dan Relevansi
Bilangan adalah dasar dari matematika, maka kalau kita belajar kalkulus/ilmu matematika tidak akan lepas dari sistem bilangan, karena semua bentuk operasi matematika menggunakan sistem bilangan, begitu pula untuk mempelajari matematika teknik lanjut.
1.1.3 Standart Kompetensi
Seorang sarjana teknik elektro diharapkan dapat menguasai materi sistem bilangan ini, karena untuk menguasai ilmu teknik elektro tidak lepas dari ilmu matematis sehingga sebagai dasar ilmu matematis ini, yaitu sistem bilangan harus dimengerti dan difahami, dan untuk mempelajari materi matematika lanjut diharuskan menguasai sistem bilangan.
biner, bilangan oktal, bilangan hexadesimal, garis bilangan dan sifat-sifatnya. 2. Mahasiswa dapat mengunakan operasi penjumlahan, pengurangan, dan
perkalian dari macam-macam sistem bilangan. 3. Mahasiswa dapat memahami sistem relasi utama. 4. Mahasiswa dapat menyelesaikan pertidaksamaan.
5. Mahasiswa dapat menggunakan metoda nilai mutlak dan interval/selang.
1.2 Sistem Bilangan Real
Pada bagian ini, pembaca diingatkan kembali pada konsep tentang himpunan.
Himpunan adalah sekumpulan obyek/unsur dengan kriteria/syarat tertentu. Unsur-unsur dalam himpunan S disebut anggota (elemen) S. Himpunan yang tidak memiliki anggota disebut himpunan kosong, ditulis dengan notasi atau { }.
Jika a merupakan anggota himpunan S, maka dituliskan aS dan dibaca “a elemen S”. Jika a bukan anggota himpunan S, maka dituliskan aSdan dibaca “a buka n elemen S”.
Pada umumnya, sembarang himpunan dapat dinyatakan dengan 2 cara. Pertama, dengan mendaftar seluruh anggotanya. Sebagai contoh, himpunan A yang terdiri atas unsur-unsur 1,2,3,4,5,6,7,8,9 dapat dinyatakan sebagai: A{1,2,3,4,5,6,7,8,9}.
Cara yang kedua, yaitu dengan menuliskan syarat keanggotaan yang dimiliki oleh seluruh anggota suatu himpunan tetapi tidak dimiliki oleh unsur-unsur yang bukan anggota himpunan tersebut. Apabila himpunan A di atas dinyatakan dengan cara ini, maka dapat ditulis: A{ xx bilanganbulatpositifkurangdari10}.
Himpunan A disebut himpunan bagian himpunan B, ditulis AB, jika setiap anggota A merupakan anggota B. Kiranya tidaklah sulit untuk dipahami bahwa A
untuk sebarang himpunan A.
Selanjutnya, akan disampaikan beberapa himpunan bilangan yang dipandang cukup penting. Himpunan semua bilangan asli adalah N
1,2,3,...
. Himpunan ini tertutup terhadap operasi penjumlahan dan operasi pergandaan, artinya x yN danN y
bersama-sama dengan bilangan nol dan bilangan-bilangan bulat negatif membentuk
Sistem Bilangan Bulat, ditulis dengan notasi Z,
...,3,2,1,0,1,2,3,...
Z
Bilangan rasional adalah bilangan yang merupakan hasil bagi bilangan bulat dan bilangan asli. Himpunan semua bilangan rasional ditulis dengan notasi Q,
Z N
Q a b
b a
dan :
Dalam kehidupan nyata seringkali dijumpai bilangan-bilangan yang tidak rasional. Bilangan yang tidak rasional disebut bilangan irasional. Contoh-contoh bilangan irasional antara lain adalah 2 dan . Bilangan 2 adalah panjang sisi miring segitiga siku-siku dengan panjang sisi-sisi tegaknya masing-masing adalah 1 (lihat Gambar 1.1).
Sedangkan bilangan merupakan hasil bagi keliling sebarang lingkaran terhadap diameternya (Gambar 1.2).
Himpunan semua bilangan irasional bersama-sama dengan Q membentuk himpunan semua bilangan real R. Seperti telah diketahui, untuk menyatakan sembarang bilangan real seringkali digunakan cara desimal. Sebagai contoh, bilangan-bilangan
66 7 dan , 3 5 , 4 3
1
1 2
Gambar 1.1
d1
l1 l2
d2 2
2
1 1
d l d
l
.... 1060606 ,
0 Dapat ditunjukkan bahwa bentuk desimal bilangan-bilangan rasional adalah salah satu dari 2 tipe berikut:
(i) berhenti ( dst. 8 1 , 2 5 , 4 3
), atau
(ii) berulang beraturan ( ,dst. 66
7 , 3 5
).
Apabila bentuk desimal suatu bilangan tidak termasuk salah satu tipe di atas, maka bilangan tersebut adalah irasional. Sebagai contoh, bilangan-bilangan:
... 14159 , 3 ...
414213 ,
1
2
1.2.1 Sifat-sifat Bilangan Real
Pembaca diingatkan kembali kepada sifat-sifat yang berlaku di dalam R. Untuk sebarang bilangan real a,b,c,dand berlaku sifat-sifat sebagai berikut:
1. Sifat komutatif
(i). abba (ii).a.bb.a
2. Sifat asosiatif
bc ab c abc ac b a c b a c b a
. . . . . . ). ii (
). i (
3. Sifat distributif
) . ( ) . ( )
.(b c ab ac
a
4. (i). .1, b0
b a b a
(ii). , 0, 0
. ) . ( ) . (
b d
d b
c b d a d c b a
(iii). , 0, 0
. .
. b d d
b c a d c b a
5. (i). a.(b)(a).b(a.b) (ii). (a).(b)a.b
(iii). (a)a
6. (i). 0 0
(ii). 0
a
tak terdefinisikan.
(iii). 1 a a
, untuk setiap bilangan a 0.
7. Hukum kanselasi
(i). Jika a.cb.c dan c0 maka a b. (ii). Jika b,c0 maka
b a c b
c a
. .
. 8. Sifat pembagi nol
Jika a.b0 maka a 0 atau b0.
1.3 Sistem Bilangan Desimal
Sistim bilangan desimal untuk membentuk suatu bilangan digunakan simbol yang dinamakan digit. digit tersebut adalah 0,1,2,3,4,5,6,7,8, dan 9. Banyaknya digit dalam suatu system disebut radix atau dasar. Sehingga dasar dari bilangan desimal adalah 10. Sistem bilangan decimal juga melibatkan tanda minus (-) untuk menandai bilangan negative dan tanda koma untuk menandai pecahan.
Tabel 1. Daftar sistem bilangan desimal dan nilai tempat Kedudukan
ke kiri dari koma 4 3 2 1
ke kanan dari koma 1 2 3 4 nilai tempat 1000 100 10 1 0,1 0,01 0,001 0,0001 pangkat dari 10 103 102 101 100 10-1 10-2 10-3 10-4
Contoh.
Tentukan nilai dari 5, 3, dan 1 dari bilangan 543,21. Penyelesaian :
5 adalah digit ketiga dari sebelah kiri tanda koma maka nilainya = 5 x 103-1= 5 x 102 = 500.
3 adalah digit pertama dari sebelah kiri tanda koma maka nilainya = 3 x 101-1 = 3 x 100 = 3.
1.4 Sistem Bilangan Biner
Sistem bilangan biner hanya mempunyai dua digit, yaitu 0 dan 1. Sehingga dasar bilangan untuk sistem biner adalah 2. Untuk mengubah bilangan desimal bulat ke biner digunakan pembagian berulang oleh dasar sistem bilangan biner (2) hingga pembilangnya nol (0). Sisanya dari masing-masing pembagian merupakan hasilnya yang dibaca dari bawah ke atas.
Latihan.
1. Ubahlah 5410 ke bentuk biner. 2. Ubahlah 0,8437510 ke biner.
3. Ubahlah 11001.0102 ke bilangan desimal.
1.5 Sistem Bilangan oktal
Bilangan ini mempunyai delapan digit, yaitu ; 0,1,2,3,4,5,6, dan 7. Sehingga dasar bilangan oktal adalah 8. Sistem bilangan oktal sering digunakan untuk menunjukkan informasi biner dari komputer.
Langkah untuk merubah bilangan desimal ke oktal :
1. Untuk mengubah bilangan bulat, digunakan pembagian berulang dengan 8 hingga pembilangnya nol.
2. Untuk mengubah bilangan pecahan ke bilangan oktal digunakan perkalian berulang dengan 8 dan kelebihan bilangan bulatnya merupakan hasilnya.
Latihan.
1. Ubahlah 43210 ke oktal. 2. Ubahlah 0,492187510 ke oktal. 3. Ubahlah 701.238 ke desimal.
1.6 Sistem Bilangan Hexadesimal
Sistim bilangan hexadesimal mempunyai enambelas digit, yaitu; 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E, dan F. sehingga dasar dari bilangan hexadecimal adalah
16. Alphabet yang digunakan pada system hexadecimal adalah „A‟ (alpha), „B‟ (bravo), „C‟ (charley), „D‟ (delta), „E‟ (echo), dan „F‟ (fox).
1. Untuk mengubah bilangan bulat, digunakan pembagian berulang dengan 16 hingga pembilangnya nol.
2. Untuk mengubah bilangan pecahan desimal ke bilangan hexadesimal digunakan perkalian berulang dengan 16 dan kelebihan bilangan bulatnya merupakan hasilnya.
Latihan.
1. Ubahlah 242010 ke bentuk hexadesimal. 2. Ubahlah 0,492187510 ke hexadesimal. 3. Ubahlah A3.F216 ke bilangan desimal.
Tabel 2. Daftar perbandingan antara bilangan desimal, biner, oktal dan hexadesimal.
Desimal Biner Oktal Hexadesimal
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0 1 10 11 100 101 110 111 1000 1001 1010 1011 1100 1101 1110 1111
0 1 2 3 4 5 6 7 10 11 12 13 14 15 16 17
0 1 2 3 4 5 6 7 8 9 A B C D E F
Tabel 3. Daftar untuk mengubah bilangan biner ke oktal atau sebaliknya
Oktal 0 1 2 3 4 5 6 7
Biner 000 001 010 011 100 101 110 111
Contoh.
Jawab.
110 . 101 = bilangan biner 6 . 5 = bilangan oktal
2. Ubahlah bilangan 23.468 ke bilangan biner. Jawab.
2 3 . 4 6 = bilangan oktal 010 011 . 100 110 = bilangan biner
Tabel 4. Daftar untuk mengubah bilangan biner ke hexadesimal atau sebaliknya
Hexadesimal 1 2 3 4 5 6 7
Biner 0001 0010 0011 0100 0101 0110 0111
8 9 A B C D E F
1000 1001 1010 1011 1100 1101 1110 1111
Contoh.
1. Ubahlah 101100.10102 ke bilangan hexadesimal. Jawab.
0010 1100 . 1010 = bilangan biner
2 C . A = bilangan hexadesimal 2. Ubahlah F0.CC16 ke bilangan biner.
Jawab.
F 0 . C C = bilangan hexadesimal 1111 0000 . 1100 1100 = bilangan biner
Latihan.
1. Tentukan nilai desimal dari :
a. 1102 c. 1108 e. 11016
b. 10.112 d. 76.28 f. 76.216
2. Ubahlah bilangan desimal berikut ke bilangan biner, oktal, dan hexadesimal.
a. 132,43 b. 85,96
1.7 Operasi Sistem Bilangan
Bilangan Biner
a. Penjumlahan : 0 + 0 = 0 0 + 1 = 1 1 + 1 = 10 b. Pengurangan : 0 – 0 = 0
1 - 1 = 0 1 - 0 = 1 0 - 1 = 1 c. Perkalian : 0 x 0 = 0
0 x 1 = 0 1 x 1 = 1 b. Pembagian : 0 : 0 = 0
0 : 1 = 0 1 : 1 = 1
Contoh.
1. a.
2 2 2
1000010 10101 101101
b.
2 2 2
1000001000 10011011 101101101
2. a.
2 2 2
101110 101101 1011011
b.
2 2 2
101100010 101101011 1011001101
3. a. x
2 2 2
1101001 10101
00000 10101
101 10101
b. x
2 2 2
1011001011 110111
110111 10111
4. a.
1 , 11
0 10 10 10 1 1 10 111
10 b.
11
0 100 100 100 1100 100
Bilangan Oktal
a. Penjumlahan : 1. 8 8 8
11405 2132 7253
2.
8 8 8
12220 4356 5642
b. Pengurangan : 1. 8 8 8
11405 6724 72153
2.
8 8 8
10676 10775 21673
c. Perkalian : x
1261002 10264
20550 24702
245 4132 8 8
d. Pembagian :
375
0 151 151 223
240 77 12301 25
Bilangan Hexadesimal
a. Penjumlahan : 1. 16 16
16
2 9
1 16
59 3
A A B
ED B A
2.
16 16
16
526 19
157 03
A DA
b. Pengurangan : 1. 16 16 16
87 19
5 1
1 36
D A CE
BE
2.
16 16 16
8 3
4 35
ED E
CDF A
Bc E
c. Perkalian : x
C A D BD AE
880676 635 2227
6 282
2 31
16 16
d. Pembagian :
90
0 0 0 15
BD BD
1.8 Relasi Urutan
Himpunan semua bilangan real dapat dibagi menjadi 3 himpunan bagian tak kosong yang saling asing: (i). Himpunan semua bilangan real positif;
(ii). Himpunan dengan bilangan 0 sebagai satu-satunya anggota; (iii). Himpunan semua bilangan real negative.
Untuk sebarang bilangan real a dan b, a dikatakan kurang dari b (ditulis ab) jika ba positif. Bilangan a dikatakan lebih dari b (ditulis a b) jika ba. Sebagai contoh, 25dan 31. Mudah ditunjukkan bahwa:
a. Bilangan a positif jika dan hanya jika a 0. b. Bilangan a negatif jika dan hanya jika a 0.
Jika a kurang dari atau sama dengan b, maka ditulis a b. Jika a lebih dari atau sama dengan b, maka ditulis a b. Sedangkan a bc dimaksudkan sebagai a b dan
c
b . Artinya b antara a dan c. Berikut ini adalah beberapa sifat yang sangat penting untuk diketahui. Untuk sebarang bilangan real a, b, dan c:
1. Jika a b maka acbc untuk setiap bilangan real c. 2. Jika a b danbc maka a c.
3. a. Jika a b dan c0 maka a.cb.c.
4. a. Jika a 0 maka 1 0
a .
b. Jika 0ab maka
a b
1 1
.
5. Untuk sebarang bilangan real a dan b berlaku tepat satu:
b a b
a b
a , , atau
6. Jika a,b0 maka: aba2 b2 a b.
1.9 Garis Bilangan
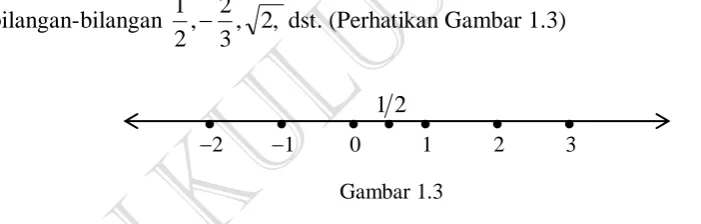
Secara geometris, sistem bilangan real R dapat digambarkan dengan garis lurus. Mula-mula diambil sebarang titik untuk dipasangkan dengan bilangan 0. Titik ini dinamakan titik asal (origin), ditulis dengan O. Pada kedua sisi dari O dibuat skala sama (segmen) dan disepakati arah positif disebelah kanan O sedangkan arah negatif disebelah kiri O. Selanjutnya, bilangan-bilangan bulat positif 1, 2, 3, … dapat dipasangkan dengan masing-masing titik di kanan O dan bilangan-bilangan 1,2,3,... dengan titik-titik di sebelah kiri O. Dengan membagi setiap segmen, maka dapat ditentukan lokasi untuk bilangan-bilangan , 2,
3 2 , 2 1
dst. (Perhatikan Gambar 1.3)
Dengan cara demikian, maka setiap bilangan real menentukan tepat satu titik pada garis lurus dan sebaliknya setiap titik pada garis lurus menentukan tepat satu bilangan real. Oleh sebab itu, garis lurus sering disebut pula Garis Bilangan Real.
1.10 Pertidaksamaan
Perubah (variable) adalah lambang (simbol) yang digunakan untuk menyatakan sebarang anggota suatu himpunan. Jika himpunannya R maka perubahnya disebut
perubah real. Selanjutnya, yang dimaksudkan dengan perubah adalah perubah real.
Pertidaksamaan (inequality) adalah pernyataan matematis yang memuat satu
2 1 0 1 2 3
Gambar 1.3
Contoh.
a. 2x7 x1 c. x2 y2 9
b. 1
3 1 2
x
x
d. x2x120
Menyelesaikan suatu pertidaksamaan memiliki arti mencari seluruh bilangan real yang dapat dicapai oleh perubah-perubah yang ada dalam pertidaksamaan tersebut sehingga pertidaksamaan tersebut menjadi benar. Himpunan semua bilangan yang demikian ini disebut penyelesaian. Sifat-sifat dan hukum dalam R sangat membantu dalam mencari penyelesaian suatu pertidaksamaan.
Contoh.
Tentukan penyelesaian pertidaksamaan 2x55x7. Penyelesaian:
4
) 3 1 .( 12 ) 3 1 .( 3
12 3
5 5 7 5 5 5 5 2
7 5 5 2
x x x
x x
x x
x x
Jadi, penyelesaian pertidaksamaan di atas adalah
xR x4
.Pertidaksamaan tipe lain mungkin lebih sulit diselesaikan dibandingkan pertidaksamaan-pertidaksamaan seperti pada contoh di atas. Beberapa contoh diberikan sebagai berikut.
Contoh.
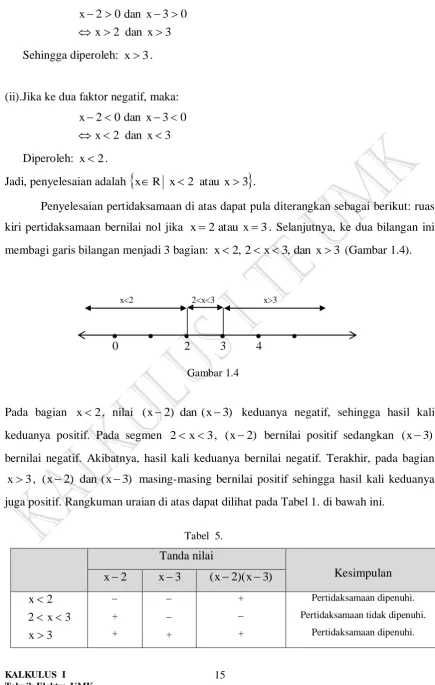
Tentukan penyelesaian pertidaksamaan: x2 5x60 .
Penyelesaian: Dengan memfaktorkan ruas kiri pertidaksamaan, maka diperoleh:
x2
x3 0Telah diketahui bahwa hasil kali 2 bilangan real positif apabila ke dua faktor positif atau ke dua faktor negatif. Oleh karena itu,
3 dan 2
0 3 dan 0 2
x x
x x
Sehingga diperoleh: x3.
(ii).Jika ke dua faktor negatif, maka:
3 dan 2
0 3 dan 0 2
x x
x x
Diperoleh: x2.
Jadi, penyelesaian adalah
xR x2 atau x3
.Penyelesaian pertidaksamaan di atas dapat pula diterangkan sebagai berikut: ruas kiri pertidaksamaan bernilai nol jika x2atau x3. Selanjutnya, ke dua bilangan ini membagi garis bilangan menjadi 3 bagian: x2, 2x3,dan x3 (Gambar 1.4).
Pada bagian x2, nilai (x2) dan (x3) keduanya negatif, sehingga hasil kali keduanya positif. Pada segmen 2 x3, (x2) bernilai positif sedangkan (x3) bernilai negatif. Akibatnya, hasil kali keduanya bernilai negatif. Terakhir, pada bagian
3
x , (x2) dan (x3) masing-masing bernilai positif sehingga hasil kali keduanya juga positif. Rangkuman uraian di atas dapat dilihat pada Tabel 1. di bawah ini.
Tabel 5.
Tanda nilai
Kesimpulan
2
x x3 (x2)(x3)
3 3 2
2
x x
x
+
+
+
+
+
Pertidaksamaan dipenuhi.
Pertidaksamaan tidak dipenuhi.
Pertidaksamaan dipenuhi.
0 2 3 4
x<2 2<x<3 x>3
Jadi, penyelesaian pertidaksamaan adalah
xR x2 atau x3
.Metode penyelesaian seperti pada Contoh di atas dapat pula diterapkan pada bentuk-bentuk pertidaksamaan yang memuat lebih dari 2 faktor maupun bentuk-bentuk pecahan.
Contoh.
Tentukan penyelesaian x32x2 x11.
Penyelesaian: Apabila ke dua ruas pada pertidaksamaan di atas ditambah 1, maka diperoleh:
0 ) 2 )( 1 )( 1 (
0 2 2 2
3
x x x
x x x
Jika (x1)(x1)(x2)0, maka diperoleh: x1, x1,atau x2. Selanjutnya, perhatikan table berikut:
Tabel 6
Tanda nilai/nilai
Kesimpulan
1
x x1 x2 (x1)(x1)(x2)
2 1 1 2
2 1
1 1
1
x x x x
x x
x
+
+
+
0
2
3
+
+
2 0
1
+
3
1 0
+
+
0
0
0
Pertidaksamaan dipenuhi.
Pertidaksamaan tidak dipenuhi.
Pertidaksamaan dipenuhi.
Pertidaksamaan tidak dipenuhi.
Pertidaksamaan dipenuhi.
Pertidaksamaan dipenuhi.
Pertidaksamaan dipenuhi.
Jadi, penyelesaian adalah
xR x1atau 1x2
. ContohSelesaikan 1
2 6 2
x x
x
.
0 2 ) 2 )( 5 ( 0 2 10 3 0 2 2 8 2 0 ) 1 ( 2 8 2 2 2 x x x x x x x x x x x x x
Nilai nol pembilang adalah 2dan 5, sedangkan nilai nol penyebut adalah 2. Sekarang, untuk mendapatkan nilai x sehingga 0
2 ) 2 )( 5 ( x x x
diperhatikan tabel berikut:
Tabel 7
Tanda nilai/nilai
Kesimpulan
2
x x2 x5
2 ) 5 )( 2 ( x x x 5 2 2 5 5 2 2 2 2 x x x x x x x + + + 0 4 7 + + 4 0 3 + 7 3 0 + + 0 tak terdefinisikan 0
Pertidaksamaan tidak dipenuhi.
Pertidaksamaan dipenuhi.
Pertidaksamaan tidak dipenuhi.
Pertidaksamaan dipenuhi.
Pertidaksamaan dipenuhi.
Pertidaksamaan tidak dipenuhi.
Pertidaksamaan dipenuhi.
Jadi, penyelesaian adalah
xR 2 x2 atau x5
.1.11 Nilai Mutlak (Absolute Value)
Nilai mutlak suatu bilangan adalah panjang/jarak bilangan tersebut dari bilangan 0. Jadi, nilai mutlak 5 adalah 5, nilai mutlak 7 adalah 7, nilai mutlak 0 adalah 0, dan seterusnya.
Definisi; Nilai mutlak xR , ditulis dengan notasi x, didefinisikan sebagai: 2
x x .
0 ,
0 ,
x x
x x
x
Sebagai contoh, 8 (8)8,
2 5 2 5
, 3 3, dst. Selanjutnya, sifat-sifat nilai mutlak diterangkan sebagai berikut.
Sifat 1. Jika x,yR maka:
a. x 0 x 0 x0
b. x.y x.y , asal y0
y x y x
c. x y x y x y (Ketaksamaan segitiga)
y x y x y
x
Secara geometris, nilai mutlak xa dapat diartikan sebagai jarak dari a ke x. Sebagai contoh, jika x3 7 maka artinya x berjarak 7 unit di sebelah kanan atau di sebelah kiri 3 (lihat Gambar 1.5).
Jadi, penyelesaian x3 7 adalah
4,10
.Dengan mengingat Sifat 1. (b), kiranya mudah dipahami sifat berikut:
Sifat 2. Jika a 0, maka: x a xa atau xa. Sebagai contoh,
4 3 10
7 unit 7 unit
3 5 atau 3 5 5 3 atau 5 3 5 3 x x x x x Secara sama, 2 atau 5 4 2 atau 10 2 7 3 2 atau 7 3 2 berarti 7 3 2 x x x x x x x
Sifat 3. Jika a 0, maka: (a). x a a xa.
(b). x a xa atau xa. Contoh.
Selesaikan 2x3 7.
Penyelesaian: Menggunakan Sifat 1.1.9 (b), diperoleh:
5 atau 2 10 2 atau 4 2 7 3 2 atau 7 3 2 7 3 2 x x x x x x xJadi, penyelesaian adalah
xR x2 atau x5
.Contoh .
Tentukan semua nilai x sehingga 3 2 2 x x . Penyelesaian: Berdasarkan Sifat 1.1.9 (a), maka:
2 atau 5 6 0 2 6 5 0 3 2 2 3 2 2 ). i ( x x x x x x x x 6 atau 2 0 2 6 0 3 2 2 3 2 2 ). ii ( x x x x x x x x
maka, diperoleh: atau 6 5 6 x x . Contoh .
Tentukan penyelesaian pertidaksamaan x4 x2. Penyelesaian:
(i). Apabila x20, maka selalu berlaku x4 x2 untuk setiap x. Sehingga diperoleh: x2.
(ii). Jika x20, maka:
3 2 2 , 6 2 2 , 2 4 atau 2 4 2 4 x x x x x x x x x xDari (i) dan (ii), diperoleh x3.
1.12 Selang (Interval)
Diberikan sebarang dua bilangan real a dan b, dengan a b. Berturut-turut didefinisikan:
x x a
a
x x a
Contoh .
Tentukan penyelesaian 3 2 2 x x .
Penyelesaian: Berdasarkan Sifat 1.6 maka diperoleh:
2 , 6 5 6 2 , 0 6 6 5 2 , 0 36 36 5 2 , 4 4 9 4 0 2 , 2 3 2 3 2 2 2 2 2 x x x x x x x x x x x x x x x x xJadi, penyelesaian adalah ,2
2,6 5 6 .1.13 Latihan Soal
Untuk soal 1 – 21 tentukan penyelesaiannya.
1. 4x52 2. 6x39x4 3. 3x52
4. x25x140 5. x23x10 6. x32x10
7. 1
3 1 2 x x
8. 5
2 2
x 9. 1
2 3 x x 10. x x x 3 1 2 4
11. x
x x 5 2 12. 2 1 2 7 3 x x
13.x3 4 14.3x2 5 15.123x 7
16. 1 2
x 17. 3
2
x 18. 2
1 x x 19. 2 1 1 2 x x
20.x2 x3 21.x12x
Untuk soal 22 – 24 tentukan x sehingga masing-masing pernyataan mempunyai arti.
22. 2x2 3x5 23.
8 2
1 2
2
x x x 24. 3 2 3 2 1 x x
26. Jika a b maka tunjukkan bahwa a ab b
2 . Bilangan 2
b a
disebut rata-rata aritmatika dari bilangan a dan b.
27. Jika 0a b maka tunjukkan bahwa a ab b. Bilangan ab disebut rata-rata geometri dari bilangan a dan b. Tunjukkan pula bahwa rata-rata geometri dari bilangan a dan b kurang dari rata-rata aritmatikanya.
28. Tunjukkan bahwa x y xy . 29. Jika a,b0 dan ab maka tunjukkan
b a
1 1
. 30. Jika a b dan c0, tunjukkan acbc.
1.14 Daftar Pustaka
BAB II
SISTEM KOORDINAT
2.1 Pendahuluan
Sistem koordinat adalah suatu cara/metode untuk menentukan letak suatu titik. Ada beberapa macam sistem koordinat: sistem koordinat cartesius, sistem koordinat kutub, sistem koordinat tabung, dan sistem koordinat bola. Pada bagian ini hanya akan dibicarakan sistem koordinat cartesius dan sistem koordinat kutub saja.
2.1.1 Deskripsi
`Pada bab ini akan membahas sistem koordinat dengan materi-materi dasar antara lain; sistem koordinat cartesius, sistem koordinat kutub, hubungan antara sistem koordinat cartesius dan sistem koordinat kutub.
2.1.2 Manfaat dan Relevansi
Dengan materi sistem koordinat ini diharapkan seorang sarjana teknik elektro dapat merancang dan membuat sistem titik koordinat dengan benar. Sehingga dalam perancangan dapat mendekati kebenaran, atau dalam perancangan lebih optimal.
2.1.3 Standart Kompetensi
Setelah mempelajari bab ini seorang mahaisiswa diharapkan dapat menguasai sistem koordinat cartesius dan koordinat kutub sehingga dalam penerapannya pada teknik elektro lebih maximal.
2.1.4 Kompetensi Dasar
1. Mahasiswa dapat mengenali dan menguasai operasi sistem koordinat cartesius dan koordinat kutub
2.2 Sistem Koordinat Cartesius
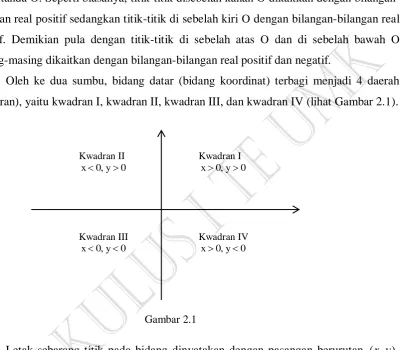
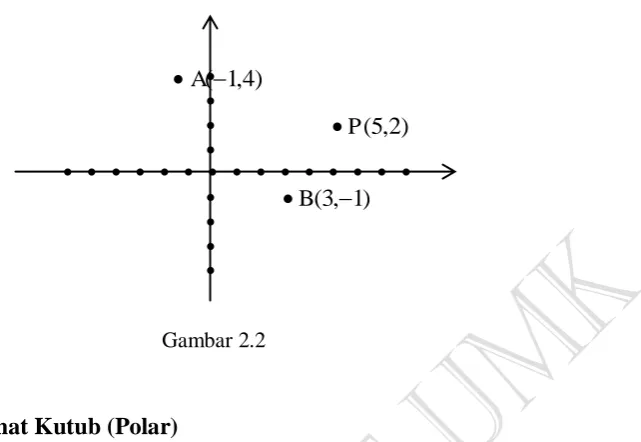
Diperhatikan 2 garis lurus, satu mendatar (horizontal) dan yang lain tegak (vertical). Selanjutnya, garis mendatar ini disebut sumbu-x sedangkan garis yang tegak disebut sumbu-y. Perpotongan kedua sumbu tersebut dinamakan titik asal (origin) dan diberi tanda O. Seperti biasanya, titik-titik disebelah kanan O dikaitkan dengan bilangan-bilangan real positif sedangkan titik-titik di sebelah kiri O dengan bilangan-bilangan real negatif. Demikian pula dengan titik-titik di sebelah atas O dan di sebelah bawah O
masing-masing dikaitkan dengan bilangan-bilangan real positif dan negatif.
Oleh ke dua sumbu, bidang datar (bidang koordinat) terbagi menjadi 4 daerah (kwadran), yaitu kwadran I, kwadran II, kwadran III, dan kwadran IV (lihat Gambar 2.1).
Letak sebarang titik pada bidang dinyatakan dengan pasangan berurutan (x,y). Titik P(x,y) mempunyai arti bahwa jarak titik P ke sumbu-x dan sumbu-y masing-masing adalah y dan x . Apabila x0 (atau y0) maka titik P berada di sebelah kiri (atau sebelah bawah) titik asal O dan apabila x0 (atau y0) maka titik P terletak di sebelah kanan (atau sebelah atas) titik asal O. Dalam hal ini, x disebut absis titik P
sedangkan y disebut ordinat titik P.
Kwadran I
0 , 0
y x
Kwadran II
0 , 0
y x
Kwadran III
0 , 0
y x
Kwadran IV
0 , 0
y x
Sistem Koordinat Kutub (Polar)
Pada sistem koordinat Cartesius, letak titik pada bidang dinyatakan dengan pasangan (x,y), dengan x dan y masing-masing menyatakan jarak berarah ke sumbu-y
dan ke sumbu-x. Pada sistem koordinat kutub, letak sebarang titik P pada bidang dinyatakan dengan pasangan bilangan real
r, , dengan r menyatakan jarak titik P ke titik O (disebut kutub) sedangkan adalah sudut antara sinar yang memancar dari titik Omelewati titik P dengan sumbu-x positif (disebut sumbu kutub) (lihat Gambar 2.3).
Berbeda dengan sistem koordinat Cartesius, dalam koordinat kutub letak suatu titik dapat dinyatakan dalam tak hingga banyak koordinat. Sebagai contoh, letak titik
) 3 , 3 (
P dapat digambarkan dengan cara terlebih dulu melukiskan sinar yang memancar dari titik asal O dengan sudut sebesar
3
radian terhadap sumbu mendatar arah positif.
Kemudian titik P terletak pada sinar tadi dan berjarak 3 satuan dari titik asal O (lihat Gambar 2.4 (a)). Titik P dapat pula dinyatakan dalam koordinat
3, 32k
, dengan kGambar 2.2
P(5,2)
A(1,4)
B(3,1)
Gambar 2.3
r
) , (r P
bilangan bulat (lihat Gambar 2.4 (b)). Mudah ditunjukkan pula bahwa koordinat
3,4 3
pun juga menggambarkan titik P (lihat Gambar 2.4 (c)). Pada koordinat yang terakhir, jarak bertanda negatif. Hal ini dikarenakan titik P terletak pada bayangan sinarP O .
Secara umum, jika
r, menyatakan koordinat kutub suatu titik maka koordinat titik tersebut dapat pula dinyatakan sebagai berikut:
r,2k
atau
r,(2k1)
dengan k bilangan bulat. Kutub mempunyai koordinat (0,) dengan sebarang bilangan.2.3 Hubungan Antara Sistem Koordinat Cartesius dan Sistem Koordinat Kutub
Suatu titik P berkoordinat (x,y) dalam sistem koordinat Cartesius dan (r,) 3
) 3 , 3 (
P
3
(b) 3
) 2 3 , 3
( k
P
32k
(a)
(c) 3
) 3 4 , 3 (
P
3 4
3
P
O
sumbu kutub dan sumbu-x positif juga diimpitkan, maka kedudukan titik dapat digambarkan sebagai berikut:
Dari rumus segitiga diperoleh hubungan sebagai berikut: (1.1) xrcos yrsin
atau:
(1.2)
r x r
y y
x
r 2 2 arcsin arccos
Contoh.
Nyatakan ke dalam system koordinat Cartesius.
a.
3 2 , 4
A b.
4 , 5
B c.
6 5 ,
3
C
Penyelesaian: Dengan menggunakan persamaan (1.1):
a. 2 3
3 2 sin 4 2
3 2 cos
4
y
x .
Jadi, A
2,2 3
.b. 2
2 5 4 sin 5 2
2 5 4 cos
5
y
x .
Jadi, dalam system koordinat Cartesius
2
2 5 , 2 2 5
B .
) , ( ) ,
(x y r
P
r y
x
O x
y
c.
2 3 6 5 sin 3 3
2 3 6 5 cos
3
y
x .
Jadi,
2 3 , 2 2 3
C .
Apabila x0 maka persamaan (1.2) dapat dinyatakan sebagai:
(1.3) 2 2 2 arctan , 0
x
x y y
x
r
Hati-hati apabila menggunakan persamaan (1.3), karena
x y arctan
akan memberikan 2 nilai yang berbeda, 0 2 . Untuk menentukan nilai yang benar perlu diperhatikan letak titik P, apakah di kwadran I atau II, ataukah dikwadran II atau IV. Apabila dipilih nilai yang lain, maka r x2 y2.
Contoh.
Nyatakan ke dalam sistem koordinat kutub: a. P
4,4 b. Q(4,4)Penyelesaian: Dari persamaan (1.3), diperoleh: a. r 42(4)2 4 2
4 7 atau 4 3 4 4
arctan
Selanjutnya, karena letak titik P di kwadran IV, maka:
4 7 dengan
2
4
r , atau
4 3 dengan
2
4
r .
Jadi,
4 7 , 2
4
P atau
4 3 , 2
4
P .
b. r (4)2 42 4 2
7 3
4
Selanjutnya, karena letak titik Q di kwadran II, maka:
4 3 dengan 2
4
r , atau
4 7 dengan
2
4
r .
Jadi,
4 3 , 2
4
Q atau
4 7 , 2
4
Q .
Contoh.
Nyatakan persamaan r 2asin ke dalam sistem koordinat Cartesius.
Penyelesaian: Jika ke dua ruas persamaan di atas dikalikan dengan r maka diperoleh: )
sin ( 2
2
r a r
Selanjutnya, karena r2 x2 y2 dan rsin y maka:
, 0 2
2 2 2
2 2
ay y
x
ay y
x
yaitu persamaan lingkaran dengan pusat (0,a) dan jari-jari a .
Contoh.
Nyatakan x2 4y2 16 ke dalam system koordinat kutub.
Penyelesaian: Dengan substitusi xrcos dan yrsin maka diperoleh: 16
sin 4
cos2 2 2
2 r r
. 16 ) sin 3 1
( 2
2
r
2.5 Latihan Soal
Untuk soal 1 – 8, nyatakan masing-masing dengan dua koordinat yang lain, satu dengan
0
r dan yang lain dengan r 0.
9.
6,2 3
10.
4, 8
11.
5, 4
12.
6,7 4
13.
2,5 2
14.
7,5 6
15.
6,7 3
16.
4,7 8
Untuk soal 17 – 23, ubahlah ke dalam sistem koordinat kutub.17.
3,3
18.
2,2 19.
2,2 3
20.
3,121.
0,11
22.
3 3,3
23.
2 3, 6 3
Untuk soal 24 – 29, nyatakan masing-masing persamaan ke dalam sistem koordinat Cartesius.
24. r 3cos 25. r2 1sin 26.
cos 1
4 r
27. r 4 28.
4 7
29. r2
Nyatakan persamaan pada soal 30 – 32 ke dalam sistem koordinat kutub. 30. xy0 31. y2 14x 32. xy1 33. Tunjukkan bahwa jarak titik P(r,) dan Q(R,) adalah:
) cos( 2
2
2
r R rR
d
2.6 Daftar Pustaka
BAB III
MATRIKS
3.1 Pendahuluan
Bahwa matrik merupakan induk materi dari determinan. Banyak penjelasan memasukan materi determinan didalam matrik. Karena cakupan materi terlalu luas dikaji, maka dipisahkan kajiannya dalam dua pokok bahasan.
Matrik adalah himpunan bilangan real atau bilangan komplek yang tersusun berdasarkan baris dan kolom. Baris adalah bagian yang horizontal, kolom meruapakan bagian yang vertikal. Matrik dinamakan juga dengan array atau larik. Matrik disusun berdasarkan jumlah kolom dan baris lebih sering disebut dengan ordo (mxn). m merupakan jumlah baris dan n adalah jumlah kolom.
3.1.1 Deskripsi
Pada bab ini akan mempelajari matriks dengan materi dasar antara lain; dasar matriks, macam-macam matriks, peningkatan matriks, aljabar matriks, transformasi elementer, invers matriks, metode invers matriks.
3.1.2 Manfaat dan Relevansi
Dalam mempelajari matriks sangat erat hubungannya dengan teknik elektro, khususnya untuk penyelesaian dalam rangkaian listrik. Untuk itu harus betul-betul materi ini difahami dan dimengerti agar dalam penyelesaiannya pada teknik elektro dapat menghasilkan sistem yang baik..
3.1.3 Standart Kompetensi
Mahasiswa diharapkan dapat memahami dan menguasai materi matriks mulai dari dasar matriks sampai pengoperasiannya, sehingga dalam penerapannya pada teknik elektro dapat menghasilkan sistem yang baik, khususnya pada rangkaian listrik.
3.1.4 Kompetensi Dasar
perkalian matriks.
3. Mahasiswa dapat merubah persamaan linier menjadi persamaan matriks. 4. Mahasiswa dapat menyelesaikan metoda invers.
5. Mahasiswa dapat menggunakan metoda eleminasi gauss.
3.2 Dasar Matriks
Matriks adalah sekumpulan bilangan riil (atau elemen) atau kompleks yang disusun menurut baris dan kolom sehingga membentuk jajaran (array), persegi panjang. Bentuk umumnya:
2 3 7
5 1 6
4 2
x ber or de matr iks
adalah
Dengan kata lain suatu larikan bilangan-bilangan yang berbentuk empat persegi panjang.
A =
mn 3
m 2 m 1 m
n 2 23
22 21
n 1 13
12 11
a
a
a
a
a
a
a
a
a
a
a
a
A adalah notasi matriks sedang amn adalah elemen matriks. Deretan horisontal elemen-elemen disebut baris dan deretan vertikal disebut kolom. Indeks m menunjukkan nomor baris elemen berada, indeks n menunjukkan nomor kolom elemen berada, misal a23 artinya elemen a berada pada baris 2 dan kolom 3.
Matriks diatas memiliki m baris dan n kolom, dan disebut juga dimensi m kali n
(mn).
Matriks dengan dimensi baris m = 1, seperti:
B = [ b1 b2 bn],
C =
m 3 2 1
c c c c
Matriks yang semua unsurnya bernilai 0, seperti:
A =
0 0 0
0 0 0
0 0 0
disebut dengan matriks nol.
3.3 Macam-Macam Matriks
a) Matriks bujur sangkar (MBS) adalah sebuah matriks dimana m = n, misal matriks 33, adalah:
A =
33 32 31
23 22 21
13 12 11
a
a
a
a
a
a
a
a
a
Diagonal yang terdiri dari a11, a22, dan a33 adalah diagonal utama matriks.
MBS banyak digunakan pada penyelesaian sistem persamaan linier, dalam
sistem ini jumlah persamaan (baris) dan jumlah bilangan tak diketahui (kolom) harus sama untuk mendapatkan penyelesaian tunggal.
b) Matriks diagonal adalah matrik bujur sangkar dimana semua elemen kecuali
diagonal utama adalah 0, dan berbentuk:
A =
44 33 22 11
0
0
0
0
0
0
0
0
0
0
0
0
a a a a
c) Matriks saklar, adalah matriks diagonal yang unsur-unsurnya sama besar
d) Matriks identitas, adalah matriks diagonal yang semua elemen pada diagonal
utama bernilai 1 atau dapat juga disebut matriks satuan, seperti bentuk berikut ini:
I =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
e) Matriks segitiga atas (MSA), adalah matriks yang semua elemen dibawah
diagonal bernilai 0, bentuknya sebagai berikut:
A =
44 34 33
24 23 22
14 13 12 11
0
0
0
0
0
0
a
a
a
a
a
a
a
a
a
a
f) Matriks segitiga bawah (MSB), adalah matriks yang semua elemen diatas
diagonal bernilai 0, bentuknya sebagai berikut:
A =
44 43 42 41
33 32 31
22 21 11
0 0 0
0 0 0
a a a a
a a a
a a a
g) Matriks simetris, bila aij = aji, misalnya matriks simetris 33:
A =
8 7 2
7 3 1
2 1 5
h) Matriks simetris diagonal nol, bila aij = -aji, misalnya matriks simetris 33 yang semua unsur diagonalnya aji = 0.
i) Matriks pita, adalah matriks yang mempunyai elemen sama dengan 0,
kecuali pada satu jalur yang berpusat pada diagonal utama, bentuknya sebagai berikut:
A =
44 43 34 33 32 23 22 21 12 11 0 0 0 0 0 0 a a a a a a a a a a
, disebut juga dengan matriks tridiagonal.
j) Matriks transpose, adalah matriks yang terbentuk dengan mengganti baris
menjadi kolom dan kolom menjadi baris (notasinya AT).
Untuk matriks: A =
mn 3 m 2 m 1 m n 2 23 22 21 n 1 13 12 11 a a a a a a a a a a a a
,maka transposenya (AT) adalah AT =
mn n 3 n 2 n 1 2 m 32 22 12 1 m 31 21 11 a a a a a a a a a a a a
k) Matriks ortogonal adalah matrik bujur sangkar yang memenuhi aturan: [A]T . [A] = [A] [A]T = [I]
3.4 Peningkatan matriks
Matriks dapat ditingkatkan dengan menambahkan kolom (kolom-kolom) pada matriks asli, misalnya suatu matriks koefisien berdimensi 33,
A =
bila matriks ini akan ditingkatkan dengan menambahkan matriks identitas sehingga menjadi matriks 36, yang mempunyai bentuk sebagai berikut:
1
0
0
|
0
1
0
|
0
0
1
|
33 32 31
23 22 21
13 12 11
a a a
a a a
a a a
bentuk ini lebih menguntungkan bila dilakukan operasi pada dua matriks, dengan demikian operasi tidak dilakukan untuk dua matriks, tetapi hanya pada satu matriks yang ditingkatkan.
3.5 Aljabar Matriks
MBS dapat dikenakan suatu operator matematika seperti penjumlahan, pengalian, dan pengurangan.
a) Kesamaan dua matriks
Dua matriks A dan B dikatakan sama bila elemen-elemen matriks A sama dengan elemen-elemen matriks B dan ukuran keduanya adalah sama, aij = bji untuk semua nilai i dan j.
Notasi dan kesamaan matriks
Untuk menyatakan matriks (m x n) akan kita gunakan huruf besar tebal, misalnya A. Untuk matriks baris atau kolom kita gunakan huruf kecil tebal, misalnya;
32 31
22 21
12 11
a a
a a
a a
A
Menurut definisinya dua matriks dikatakan sama jika semua elemen yang bersesuaian letak sama, dan kedua matriks tersebut harus berorde sama.
32 31
22 21
12 11
a a
a a
a a
Jika 4; 2; 1, .
2 2
5 1
2 4
2 1 1 2
1 1 a a dst
a
ma ka
b) Penjumlahan dan pengurangan matriks
Bila A = [aij] dan B = [bij] merupakan dua matriks dengan dimensi mn, maka untuk operasi penjumlahan atau pengurangan (A B) dari kedua matriks tersebut, adalah sama dengan matriks C = [cij] dengan dimensi mn, dimana setiap elemen matriks C adalah jumlah (selisih) dari elemen-elemen yang berkaitan dari A dan B.
Agar dua matriks dapat dijumlahkan atau dikurangkan, maka orde keduanya haruslah sama. Selanjutnya jumlah atau selisihnya diperoleh dengan menambahkan atau mengurangkan elemen-elemennya yang bersesuaian.
C = AB = [aijbij] = [cij] Contoh soal:
Jika A =
4 1 0 3 2 1
dan B =
1 2 5 0 3 2
Maka:
A + B =
5 4 2 1 ) 1 ( 0 0 3 3 2 2 1 =
1 3 9 3 5 3
AB =
( 1) 12 45 0 0 3 3 2 2 1 = 1 1 1 3 1 1
A + A + A =
4 1 0 3 2 1 + 4 1 0 3 2 1 + 4 1 0 3 2 1 = 12 3 0 9 6 3
c) Perkalian matriks
Perkalian matriks A dengan skalar g didapat dengan mengalikan semua elemen dari A dengan skalar g, jika gA = C, maka cij = gaij.
(2). Perkalian dua buah matriks : dua buah matriks dapat dikalikan satu terhadap yang lain hanya jika banyaknya kolom dalam matriks yang pertama sama dengan banyaknya baris dalam matriks yang kedua.
81 55 36 35 24 42 15 6 14 35 12 12 12 3 4 28 4 . 6 6 . 7 3 . 5 1 . 6 2 . 7 7 . 5 4 . 3 6 . 2 3 . 4 1 . 3 2 . 2 7 . 4 4 1 6 2 3 7 6 7 5 3 2 4 x Contoh soal: Jika A =
3 4 2 2
dan g = 5, maka C = gA = 5
3 4 2 2 = 15 20 10 10
Perkalian dua matriks A dan B dapat dilakukan bila cacah kolom A sama dengan cacah baris B, dan kedua matriks disebut dengan conformable.
Perkalian suatu matriks 1m, yaitu A = [ a11 a12 a1m] dengan matriks
m1 yaitu:
B =
1 m 31 21 11 b b b b
adalah sebuah matriks C berukuran 11, yang berbentuk:
C = [a11b11 + a12b21 + + a1mbm1] atau
[a11 a12 a1m]
1 m 31 21 11 b b b b
Operasi perkalian adalah baris dengan kolom, tiap elemen dari baris dikalikan dengan elemen dari kolom dan kemudian dijumlahkan.
Contoh soal:
[2 3 4] 3 2 1
= [2(1) + 3(2) + 4(3)] = [2 + (6) + 12] = [8]
Perkalian antara matriks mp, yaitu A = [aij] dan matriks pn, yaitu B = [bij] adalah matriks mn, yaitu C = [cij] dengan nilai cij = ai1b1j + ai2b2j + … + aipbpj =
p
1 k
aikbkj.
Dimana untuk i= 1, 2, …, m dan j= 1, 2, …, n
Contoh soal:
A =
1 3 2 4 1 2
, B =
1 4 3 1 2 1
dan X =
3 2 1x
x
x
AB =
) 1 ( 2 ) 3 ( 3 ) 2 ( 1 ) 4 ( 2 ) 1 ( 3 ) 1 ( 1 ) 1 ( 4 ) 3 ( 1 ) 2 ( 2 ) 4 ( 4 ) 1 ( 1 ) 1 ( 2 = 5 4 3 17
BA =
2 ) 1 ( ) 4 ( 4 ) 3 )( 1 ( ) 1 ( 4 ) 1 )( 1 ( ) 2 ( 4 ) 2 ( 3 ) 4 ( 1 ) 3 ( 3 ) 1 ( 1 ) 1 ( 3 ) 2 ( 1 ) 2 ( 2 ) 4 ( 1 ) 3 ( 2 ) 1 ( 1 ) 1 ( 2 ) 2 ( 1 = 14 1 9 2 8 5 8 7 0
AX =
1 3 2 4 1 2
3 2 1x
x
x
=
3 2 1 3 2 12
3
4
2
x
x
x
x
x
x
3.6 Transformasi Elementer
Transformasi elementer pada sebuah matrik tidak mengubah baik orde maupun bentuk matriks.
a) Pertukaran tempat baris ke-i dengan baris ke-j diberi simbol Hij, pertukaran tempat kolom ke-i dengan kolom ke-j diberi simbol Kij.
Contoh: [A] =
9 8 7 6 5 4 3 2 1
H32→ [A] =
6 5 4 9 8 7 3 2 1
K31 → [A] =
7 8 9 4 5 6 1 2 3
b) Perkalian setiap unsur baris ke-i dengan bilangan skalar k (k ≠ 0) diberi simbol Hi(k) perkalian setiap unsur kolom ke-i dengan bilangan skalar k (k ≠ 0) diberi simbol Ki(k)
Contoh soal: [A] =
9 8 7 6 5 4 3 2 1
H2 (2) → [A] =
9 8 7 12 10 8 3 2 1
setiap baris ke-2 dikalikan dengan 2
K3 (-2) → [A] =
18 8 7 12 5 4 6 2 1
setiap kolom ke-3 dikalikan dengan -2
c) Penambahan pada setiap unsur baris ke-i dengan k kali (k skalar) unsur yang sesuai dari baris ke-j diberi simbol Hij(k).
Penambahan unsur yang sesuai dari kolom j pada setiap unsur kolom ke-i dengan k kali (k skalar) diberi simbol Kij(k).
Contoh soal: [A] =
9 8 7 6 5 4 3 2 1
H32 (-1) → [A] =
3 3 3 6 5 4 3 2 1
baris ke-2 dikalikan (-1) lalu dijumlahkan baris ke 3.
K31 (1) →[A] =
16 8 7 10 5 4 4 2 1
TUGAS:
Selesaikan dengan menggunakan metode transformasi elementer berdasarkan baris
(H) menjadi Matriks Segitiga Bawah (MSB) : [A] =
4 2 6 8 4 2 1 2 1 → 33 32 31 22 21 11 a a a 0 a a 0 0 a
3.7 Invers Matriks
Pada aljabar biasa bila terdapat hubungan antara dua besaran a dan x ialah kebalikan.
Contoh soal:
1) Menggunakan determinan, hitung [A]-1 bila [A]=
2 1 2 1 1 4 6 2 3 Penyelesaian:
Nilai determinan A = |A| = –17.
Dengan algoritma [A]-1 = A
1
adj [A]
A11 (baris 1 dan kolom 1 ditutup) = (+1)
2 1 1 1
= –3
A12 = (–1)
2 2
1 4
= 10, A13 = (+1) 1 2
1 4
= 2, A21 = (–1)
2 1 6 2 = 2
A22 = (+1)
2 2 6 3
= –18, A23 = (–1)
1 2 2 3
= –7, A31 = (+1)
1 1 6 2
= – 8
A32 = (–1) 1 4
6 3
= 21, A33 = (+1) 1 4 2 3 = 11 [A] = 33 32 31 23 22 21 13 12 11 A A A A A A A A A
→ [A] =
11 21 8 7 18 2 2 10 3
→ [A]T =
[A]-1 = A
1
adj [A] → → [A]-1 = 17 1 11 7 2 21 18 10 8 2 3 → = 17 11 17 7 17 1 17 21 17 18 17 10 17 8 17 2 17 3
2) Menggunakan transformasi elementer, hitung [A]-1 bila [A]=
3 2 1 2
A : I
~
I : X
Penyelesaian: 1 0 : 3 2 0 1 : 1 2 ~ x x x x : 1 0 : 0 1 1 0 : 3 2 0 1 : 1 2 =
1 1 :
2 0
0 :
1 12 12
= 2 1 2 1 2 1 2 1 : 1 0 0 : 1 = 2 1 2 1 4 1 4 3 : 1 0 : 0 1 Tugas:
Hitung [A]-1 bila [A]=
2 4 4 2 1 2 4 2 1 , dengan:
a) Menggunakan determinan, dengan algoritma [A]-1 = A
1
adj [A]
b) Menggunakan transformasi elementer, dengan algoritma
A : I
~
I : X
3.8 Metode Invers Matriks
Persamaan umum:
a11 x1 + a12 x2 + + a1n xn = b1
a21 x1+ a22 x2 + + a2n xn = b2 :
:
an1 x1 + an2 x2 + + ann xn = bn H1
12~ H21 (-1)
H2
12 ~
n 2 1 n 2 1 nn 2 n 1 n n 2 22 21 n 1 12 11 b b b x x x a a a a a a a a a
atau AX = B
dengan: A adalah matriks koefisien nn.
X adalah kolom vektor n1 dari bilangan tak diketahui.
B adalah kolom vektor n1 dari konstanta.
Nilai pada vektor kolom X dapat dicari dengan cara mengalikan kedua ruas persamaan dengan matriks inversi, yaitu A1AX = A1B, karena A1A = I, maka nilai-nilai dari elemen X = A1B,
Contoh soal:
Diketahui suatu persamaan, yaitu: 2x + y = 4 2x + 3y = 8
Maka persamaan diatas dapat ditulis =
3 2 1 2 + y x = 8 4
→ A + X = B → X =
A B
A X B
Untuk nilai A =
3 2 1 2
→ [A]-1 =
A 1
adj [A] =
4 1 2 2 1 3 = 2 1 2 1 4 1 4 3 Sehingga nilai y x
dapat dicari yaitu:
2 1 2 1 4 1 4 3 8 4 = 2 1 ,
Jadi nilai x = 1 dan y = 2.
Definisi:
Untuk membentuk invers dari matriks bujur sangkar, langkah-langkah yang harus dilakukan antara lain :
c. Tuliskan transpose matriks C, yaitu CT
d. Bagilah masing-masing elemen CT dengan hasil determinan. e. Matriks terakhir yang diperoleh adalah matriks invers (A-1).
Contoh.
Tentukan invers matriks
2
0
6
5
1
4
3
2
1
B
a. Hitung determinan dari suatu matrik bujur sangkar.
28
)
6
0
(
3
)
30
8
(
2
)
0
2
(
1
2
0
6
5
1
4
3
2
1
B
b. Bentuk matriks kofaktor C
A11 = +(2-0)=2; A12 = -(8-30)=22; A13 = +(0-6)=-6; A21 = -(4-0)=-4; A22 = +(2-18)=-16; A23 = -(0-12)=12; A31 = +(10-3)=7; A32 = -(5-12)=7; A33 = +(1-8)=-7;
7
7
7
12
16
4
6
22
2
C
c. Tuliskan transpose matriks C, yaitu CT
7
12
6
7
16
22
7
4
2
TC
B
adj
d. Bagilah masing-masing elemen CT dengan hasil determinan.
e. Matriks terakhir yang diperoleh adalah matriks invers (B-1).
7
12
6
7
16
22
7
4
2
28
1
1B
3.9 Latihan soal
1. Jika
6
1
9
2
5
3
3
5
1
4
0
6
B
dan
A
Tentukanlah : (a). A + B (b). B – A
2.
7
4
0
8
9
2
3
5
1
4
0
6
B
dan
A
Tentukanlah : (a). A x B (b). 3 . A
3. Jika
0
7
1
5
2
6
3
4
1
A
Tentukanlah : (a).
A
(b). adj. A.4. Tentukan invers matriks
6
0
2
1
5
3
4
1
2
A
5. Nyatakanlah sistem persamaan berikut dalam bentuk matriks.
3.10 Daftar Pustaka
BAB IV
LIMIT FUNGSI
4.1 Pendahuluan
Apabila nilai suatu fungsi digunakan pada variabel dan konstanta dalam suatu pernyataan (expression), maka pernyataan itu sendiri memiliki nilai numerik yang diperoleh dengan mengikuti aturan prioritas dengan nilai limit dari suatu fungsi itu sendiri.
4.1.1 Deskripsi
Pada bab ini akan membahas limit fungsi yang dapat digunakan pada teknik elektro dengan pembahasan sebagai berikut; limit fungsi aljabar dengan beberapa nilai variabel, limit fungsi trigonometri dengan beberapa nilai variabel.
4.1.2 Manfaat dan Relevansi
Dengan mempelajari limit fungsi ini harapannya kita dapat menentukan nilai pendekatan dari suatu sistem yang kita buat sehingga dalam suatu perancangan rangkaian teknik elektro apabila ada satu fungsi yang tidak ada nilainya maka kita dapat mencari nilai pendekatannya dari fungsi tersebut.
4.1.3 Standart Kompetensi
Mahasiswa diharapkan dapat memahami dan menguasai dari materi limit fungsi, sehingga dalam penerapannya pada teknik elektro khususnya dalam merancang dan membuat sistem dapat menghasilkan suatu rangkaian yang lebih baik.
4.1.4 Kompetensi Dasar
1. Mahasiswa dapat mengenali dan memahami dasar limit fungsi aljabar. 2. Mahasiswa dapat mengenali dan memahami dasar limit fungsi trigonometri. 3. Mahasiswa dapat mengunakan operasi limit fungsi aljabar dan trigonometri
4.2 Limit Fungsi Aljabar
Jika variabelnya mendekati bilangan riil maka;
a. Langsung disubtitusikan asalkan hasilnya tidak bilangan tak tentu (
0 0
, ,
~, -~ ).
b. jika disubtitusikan menghasilkan bilangan tak tentu maka langkah-langkahnya : - difaktorkan
- disederhanakan - disubtitusikan.
Contoh. 1. limit
2 3
4 4 2 2
x
x x
x→2
Penyelesaian :
5 4 20 2
2 2 . 3
4 2 . 4 2 . 2 2
3
4 4
2 2 2
x
x x x Limit
2. limit
1 5 4 2
x x x
x→1
Penyelesaian :
0 0 1
1 1
5 1 . 4 1 1
5
4 2
2
x
x x x Limit
Karena hasilnya
0 0
6 5 1 5 1 ) 1 ( ) 1 )( 5 ( 1 5 4 2 x x x x x x x x Limit
3. limit
5 3 4 2 2 x x x→2 Penyelesaian : 0 0 2 5 2 3 2 4 5 3 4 2 2 2 2 x x x Limit Karena hasilnya 0 0
maka harus disederhanakan atau difaktorkan.
6 5 2 3 5 3 ) 4 ( 5 3 )( 4 ( 5 9 5 3 )( 4 ( 2 5 3 5 3 . 5 3 4 5 3 4 2 2 2 2 2 2 2 2 2 2 2 2 2 2 x x x x x x x x x x x x x x Limit
Jika variabelnya mendekati ~
Untuk menyelesaikan limit fungsi aljabar yang variabelnya mendekati ~ maka caranya adalah pembilang dan penyebut dibagi dengan variable pangkat tertinggi.
Contoh. 1. limit
Penyelesaian :
2 1
0 0 4
0 0 2
7 5 4
4 4 2
7 5 4
4 4 2
7 5 4
4 4 2 7
5 4
4 4 2
2 2 2 2
2 2 2
2
2 2 2
2
2 2
x x
x x x
x x
x x
x
x x
x x
x x
x x x Limit
4.3 Limit Fungsi Trigonometri
Jika variabelnya mendekati sudut tertentu maka ;
a. Langsung disubtitusikan asalkan hasilnya tidak bilangan tak tentu (
0 0
,
, ~, -~
).
b. jika disubtitusikan menghasilkan bilangan tak tentu maka langkah-langkahnya : - difaktorkan
- disederhanakan - disubtitusikan.
Contoh. 1. limit
) 4 cos( 3
sin
x
x
Penyelesaian : 3 1 180 cos 3 1 90 ) 180 90 . 4 cos( 3 90 sin ) 4 cos( 3 sin 0 0 0 0 0 x x x Limit
2. limit
x tgn x x 1 cos sin x→ 4 Penyelesaian : 0 0 1 1 2 2 1 2 2 1 4 4 1 4 cos 4 sin 1 cos sin x tgn x tgn x x Limit Karena hasilnya 0 0
maka harus disederhanakan atau difaktorkan.
Jika variabelnya mendekati 0
Rumus-rumusnya adalah : a. limit sin 1
x x
b. limit 1 sinx
x
x→0 x→0
c. limit 1
x x tgn
d. limit 1
x tgn
x
x→0 x→0
Beberapa dalil trigonometri yang mendukung penyelesaian limit adalah : a.
sin
2x
cos
2x
1
b. - cos2x2cos2 x1
-
cos
2
x
1
2
sin
2 x-
cos
2
x
cos
2x
sin
2x
c. sin2x2sinxcosxContoh. 1. limit
x x
5 sin x→0
Penyelesaian :
5 1 . 5
5 5 sin 5 0
5 5 . 5 sin 5
sin
x x x
x x x
x Limit
2. limit
x tgn
x
3 x→0
Penyelesaian :
3 1
1 . 3 1
3 3
3 0
3 3 . 3 3
x tgn
x x
x tgn
x x
tgn x Limit
3. limit 1 cos2 2
x x x→0
Penyelesaian :
2 1 . 1 . 2
sin . sin . 2
sin 2 0
) sin 2 1 ( 1 2
cos 1
2 2
2 2
2
x x x
x x
x x
x x x
x Limit
4.4 Latihan Soal
Kerjakan soal no 1 – 5 menggunakan fungsi trigonometri dan soal no. 6 – 10 dengan menggunakan fungsi aljabar.
1. limit
x x
sin 2 sin x→0 2. limit
x x
x
sin cos 1 2 x→0
3. limit 2 2 cos 1
x x x→~
x→a 5. limit
x ax sin
x→0 6. limit
3 27 3
x x
y→3 7. limit
4 3
1 2
2
x x
x
x→0 8. limit
3 4
5 2
3 2
x
x x
x→~ 9. limit
2 2 3 2 2
x x
x x
x→1 10. limit
4 3
1 2
x x
x→5
4.5 Daftar Pustaka
DAFTAR RIWAYAT HIDUP PENELITI
Nama Lengkap dan Gelar : Moh. Dahlan, ST.,MT. Tempat dan Tanggal Lahir : Rembang, 01-07-1969 Jenis Kelamin : Laki-laki
Fakultas/Jurusan : Teknik/Teknik Elektro
Pangkat/Golongan/NIY : Penata Tk. I/III D/0610701000001141 Bidang Keahlian : Teknik Elektro
Alamat Kantor/Telepon/Faks. : Fakultas Teknik UMK PO.BOX. 53 Gondang Manis BAE Kudus/443844/(0291)437198 Alamat Rumah/Tele