MODEL DINAMIS : AUTOREGRESSIVE DAN
DISTRIBUSI LAG
SKRIPSI
Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta
untuk memenuhi sebagian persyaratan guna memperoleh gelar Sarjana Sains
Oleh:
Natalia Jatiningrum 04305144021
PROGRAM STUDI MATEMATIKA JURUSAN PENDIDIKAN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS NEGERI YOGYAKARTA
ii
PERSETUJUAN
SKRIPSI
MODEL DINAMIS : AUTOREGRESSIVE DAN DISTRIBUSI LAG
Telah disetujui dan disahkan pada tanggal 15 Agustus 2008
Untuk dipertahankan di depan Tim Penguji Skripsi Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Negeri Yogyakarta
Pembimbing I
Endang Listyani, M.S NIP. 131569343
Pembimbing II
Elly Arliani, M.Si NIP. 131993532
iii
PERNYATAAN
Yang bertanda tangan di bawah ini, saya :
Nama : Natalia Jatiningrum
NIM : 04305144021
Jurusan : Pendidikan Matematika Prodi : Matematika
Fakultas : Matematika dan Ilmu Pengetahuan Alam
Judul Skripsi : Model Dinamis : Autoregressive dan Distribusi Lag
Menyatakan bahwa skripsi ini adalah benar-benar hasil pekerjaan saya sendiri, dan sepanjang pengetahuan saya tidak berisi materi yang dipublikasikan atau ditulis orang lain, kecuali pada bagian-bagian tertentu yang saya ambil sebagai bahan acuan. Demikianlah pernyataan ini dibuat dengan sebenar-benarnya, apabila pernyataan ini terdapat kekeliruan sepenuhnya menjadi tanggung jawab saya.
Yogyakarta, 13 Juni 2008 Yang menyatakan,
Natalia Jatiningrum NIM.04305144021
iv
PENGESAHAN SKRIPSI
MODEL DINAMIS : AUTOREGRESSIVE DAN DISTRIBUSI LAG
Disusun oleh: Natalia Jatiningrum
NIM. 04305144021
Telah dipertahankan di depan Tim Penguji Skripsi Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Negeri Yogyakarta pada tanggal 27 Agustus 2008
dan dinyatakan telah memenuhi syarat guna memperoleh gelar Sarjana Sains
Susunan Tim Penguji
Nama Lengkap Tanda Tangan Tanggal
Ketua Penguji : Endang Listyani, M.S
NIP. 131569343 ... ... Sekretaris : Elly Arliani, M.Si
NIP. 131993532 ... ... Penguji
Utama
: Mathilda Susanti, M.Si
NIP. 131808672 ... ... Penguji Pendamping : Kismiantini, M.Si NIP. 132296139 ... ... Yogyakarta, September 2008
Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta
Dekan
Dr. Ariswan NIP. 131791367
v MOTTO
There is no rose without a thorn, there is no royal road to success (Tiada mawar yang tak berduri, tiada jalan enak menuju keberhasilan)
Strike the iron while it is hot
(Tempalah besi selagi panas. Berbuatlah ketika ada kesempatan. Pergunakanlah masa muda sebelum tua)
Education is an ornament in prosperity and a refuge in adversity (Pendidikan adalah perhiasan di waktu senang
dan tempat berlindung di waktu susah) Don’t put off till tomorrow what you can do to day
(Janganlah menunda pekerjaan yang dapat dilakukan disaat sekarang) Mawar takkan sempurna tanpa duri
Mentari takkan sempurna tanpa cahaya Kebahagiaan takkan sempurna tanpa kesengsaraan
Manusiapun takkan sempurna tanpa cinta demikian juga dengan
vi
PERSEMBAHAN
Skripsi ini kupersembahkan untuk : Ayah & Ibu
Kedua adikku Yayan & Bondan
Terima kasih telah memberikan kasih sayang, pengorbanan, perhatian, motivasi dan doa.
Teman-Teman Math’04 :
Anggi, Nely, Ria, Nopek, Mami, , Ana, Henik, Soe_See, Do_Why, Nia, Nufus,Irma, Hendro, Sofyan, Sigit, Fajar Yusfi, Johan
Terima kasih buat kebersamaan kita baik dalam suka maupun duka. Sahabat-sahabatkoe:
Pikachu, Desty, Martina, Sinta, Mbak Lina, Mbak Nia, Juve, Ris, ,Mas Andie, Mas Andri, Mas Kris dll Terima kasih telah memberikan makna indahnya persahabatan.
Temen-temen KKN Magelang 3 : Bona, Rong-Rong, Miss. Pusing, Oet-Oet, Huda, Wahyu, Andri, and Sinta. Terima kasih buat kebersamaan kita selama ini.
Kalian adalah kelurga baruku.
Teman-teman seperjuangan, senasib dan sepenanggungan : Mbak Eko, Mbak Yuni, Mbak Atun,
Mbak Audi, Mbak Isti, Mas Farid dll. Temen-temen Kos Samirono CT VI No. 151
Semua guru dan dosen
Engkau adalah pelita dalam kegelapan dan laksana embun penyejuk dalam kehausan.. Seseorang yang selalu ada dalam suka dan duka
Tiada kata yang pantas terucap selain terima kasih atas motivasi dan semua bantuannya.
vii
MODEL DINAMIS : AUTOREGRESSIVE DAN DISTRIBUSI LAG Oleh :
Natalia Jatiningrum NIM. 04305144021
ABSTRAK
Model Dinamis : Autoregresive dan Distribusi Lag merupakan model regresi linear yang memperhitungkan pengaruh waktu. Tujuan penulisan skripsi ini adalah menentukan persamaan dinamis autoregressive dugaan dan persamaan dinamis distribusi lag dugaan.
Metode yang digunakan dalam menentukan persamaan dinamis distribusi
lag dugaan adalah metode Koyck dan metode Almon. Metode Koyck digunakan jika panjang beda kala (lag) tidak diketahui sedangkan metode Almon digunakan jika panjang beda kala (lag) diketahui. Bedakala adalah waktu yang diperlukan bagi variabel bebas X dalam mempengaruhi variabel tak bebas Y. Langkah pertama dalam metode Almon adalah transformasi Almon hingga didapat persamaan Yˆt =αˆ +αˆ0 Z0t +αˆ1Z1t +αˆ2 Z2t dengan
∑
= − = k i t t X Z 0 1 0 ,∑
= − = k i t t iX Z 0 1 1 ,∑
= − = k i t t i X Z 0 1 22 . Nilai-nilai αˆ,αˆ0,αˆ1,αˆ2 untuk mencari nilai
k β β β β αˆ, ˆ , ˆ , ˆ , , ˆ 2 1
0 K dalam persamaan dinamis distribusi lag dugaan yaitu dengan
rumus βˆk =αˆ0 +kαˆ1+k2αˆ2. Y. Langkah pertama dalam metode Koyck adalah transformasi Koyck hingga didapat persamaan Yˆt =αˆ
( )
1−Cˆ +βˆ0 Xt +C) Yt−1. Nilai αˆ,βˆ0,C) untuk mencari nilai αˆ,βˆ0,βˆ1,βˆ2,K,βˆk dalam persamaan dinamis distribusi lag dugaan yaitu dengan rumus βˆk =βˆ0Cˆk. Metode Koyck juga dapat digunakan untuk menentukan persamaan dinamis autoregressive dugaan, tetapi dilakukan uji lanjutan dengan uji statistik h Durbin-Watson. Uji ini perlu dilakukan sebab dalam persamaan dinamis autoregressive terdapat Yt−1 sebagai salah satu variabel bebas sehingga kemungkinan menyebabkan autokorelasi. Penggunaan program Eviews 5 juga diperlukan untuk mempermudah perhitungan.Hasil akhir persamaan dinamis distribusi lag dugaan yang diperoleh dengan metode Koyck adalah Y∧t =αˆ +βˆ0Xt+βˆ1Xt−1+βˆ2Xt−2 +... sedangkan persamaan dinamis distribusi lag dugaan yang diperoleh dengan menggunakan metode Almon adalah Yt Xt Xt− Xt− kXt−k
∧ + + + + =αˆ βˆ βˆ βˆ ...βˆ 2 2 1 1 0 dengan t
menyatakan waktu sekarang, dan t−1,t−2,K menyatakan periode waktu sebelumnya, k menyatakan panjang beda kala (lag). Hasil akhir persamaan dinamis autoregressive dugaan adalah ˆ ˆ0 ˆ1 −1
∧ + + = t t t X Y Y α β β .
viii
KATA PENGANTAR
Puji syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa yang telah memberikan berkat dan karunia-Nya sehingga penyusunan skripsi yang berjudul “Model Dinamis : Autoregressive dan Distribusi Lag ” dapat terselesaikan.
Skripsi ini disusun untuk memenuhi salah satu persyaratan guna memperoleh gelar Sarjana Sains Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta.
Penulis menyadari sepenuhnya bahwa selama penyusunan skripsi ini telah banyak menerima bantuan dari berbagai pihak. Oleh karena itu, pada kesempatan ini penulis bermaksud menyampaikan ucapan terima kasih kepada:
1. Bapak Dr. Ariswan selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta yang telah memberikan izin dan kesempatan kepada penulis dalam menyelesaikan studi.
2. Bapak Dr. Hartono selaku Ketua Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta sekaligus Penasehat Akademik yang telah memberikan kemudahan dan kelancaran pelayanan dalam urusan akademik. selama penulisan skripsi.
3. Ibu Atmini Dhoruri, M.S. selaku Ketua Program Studi Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta yang telah memberikan kemudahan dan kelancaran pelayanan dalam urusan akademik.
4. Ibu Endang Listyani, M.S selaku Dosen Pembimbing Utama yang berkenan memberikan waktu bimbingan serta dengan penuh kesabaran memberi pengarahan dalam menyusun skripsi.
5. Ibu Elly Arliani, M.Si selaku Dosen Pembimbing Pendamping yang berkenan memberikan waktu bimbingan serta dengan penuh kesabaran memberi pengarahan dalam menyusun skripsi.
6. Ibu Mathilda Susanti, M.Si selaku Dosen Penguji Utama yang telah memberikan saran dan kritik untuk perbaikan skripsi ini.
ix
7. Ibu Kismiantini, M.Si selaku Dosen Penguji Pendamping yang telah memberikan saran dan kritik untuk perbaikan skripsi ini.
8. Seluruh dosen Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta yang telah mengajarkan ilmu selama kuliah.
9. Pihak-pihak yang telah membantu penyusunan skripsi yang tidak dapat disebutkan satu persatu.
Penulis menyadari sepenuhnya bahwa skripsi ini masih jauh dari kesempurnaan. Seperti peribahasa mengatakan “Akal Tak Sekali Datang Runding Tak Sekali Tiba” yang berarti bahwa segala sesuatu tidak akan datang dengan kesempurnaan, harus berangsur-angsur. Namun, penulis berharap semoga skripsi ini dapat bermanfaat.
Yogyakarta, 13 Juni 2008 Penulis
x
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... ii
HALAMAN PERNYATAAN ... iii
HALAMAN PENGESAHAN... iv
MOTTO ... v
PERSEMBAHAN ... vi
ABSTRAK ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR SIMBOL ... xiii
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xv
DAFTAR LAMPIRAN... xvi
BAB I PENDAHULUAN A. Latar Belakang ... 1
B. Rumusan Masalah ... 5
C. Tujuan Penulisan... 6
xi BAB II LANDASAN TEORI
A. Data ... 7
1. Data Berkala (Time Series) ... 7
2. Data Seleksi Silang (Cross Section) ... 7
B. Variansi ... 7 C. Matriks ... 8 1. Definisi Matriks ... 8 2. Transpose Matriks... 8 3. Invers Matriks ... 9 4. Operasi Matriks... 9 D. Regresi Linier... 11
1. Regresi Linear Sederhana ... 11
2. Regresi Linear Berganda... 12
E. Korelasi ... 13
1. Koefisien Determinasi... 13
2. Koefisien Korelasi... 14
F. Metode Kuadrat Terkecil (Least Square Method) ... 15
G. Kesalahan Standar Estimasi ... 21
H. Asumsi Klasik ... 22
xii BAB III PEMBAHASAN
A. Metode-Metode dalam Menentukan Persamaan Dinamis Distribusi
Lag Dugaan ... 26
1. Metode Koyck... 26
2. Metode Almon ... 29
B. Metode-Metode dalam Menentukan Persamaan Dinamis Autoregressive Dugaan ... 33 C. Aplikasi ... 39 BAB IV PENUTUP A. Kesimpulan ... 56 B. Saran ... 60 DAFTAR PUSTAKA ... 60 LAMPIRAN ... 63
xiii
DAFTAR SIMBOL
2
σ : variansi populasi
µ : rata-rata hitung untuk populasi
N : banyaknya data pengamatan
Y : variabel tak bebas
X : variabel bebas
α : intersep
β : koefisien regresi / slope
ε : kesalahan pengganggu n : ukuran populasi 2 r : koefisien determinasi r : koefisen korelasi i
e : taksiran dari faktor gangguan εi X' : transpose dari matriks X
βˆ : penaksir koefisien regresi
e
S : kesalahan standar estimasi (standar error of estimate)
C : rata-rata tingkat penurunan dari distribusi lag
C −
xiv
DAFTAR GAMBAR
Gambar 2.1 Metode Kuadrat Terkecil ... 15
Gambar 3.1 Penurunan Koefisien β dalam model Koyck ... 27
Gambar 3.2 Perubahan Koefisien β ... 29
Gambar 3.3 Perubahan Koefisien β ... 29
Gambar 3.4 Perubahan Koefisien β ... 29
Gambar 3.5 Perubahan Koefisien β ... 29
xv
DAFTAR TABEL
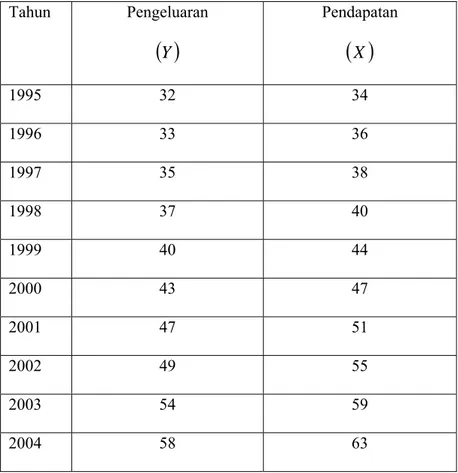
Tabel 3.1 Pengeluaran dan Pendapatan... 41
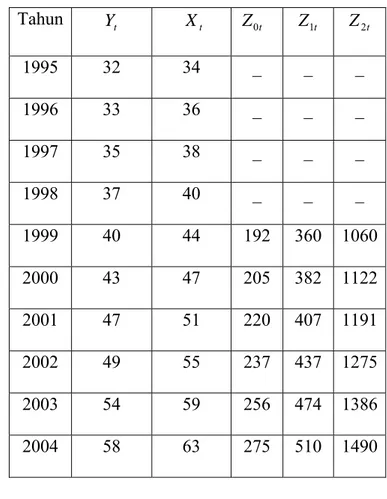
Tabel 3.2 Nilai Z Data Pengeluaran dan Pendapatan... 43
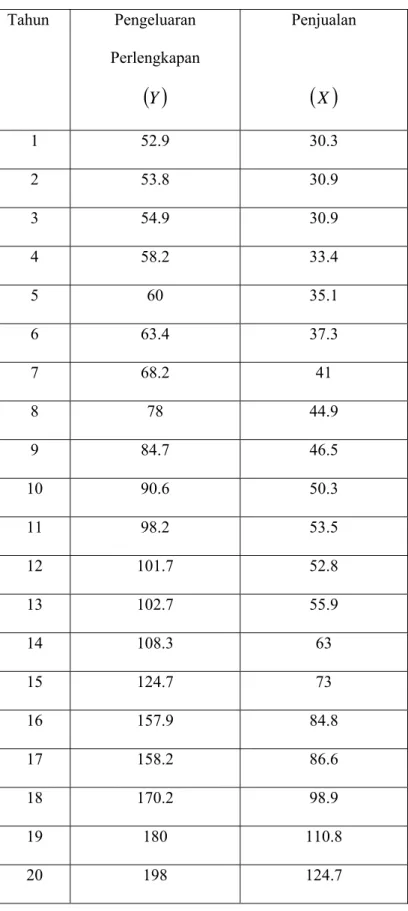
Tabel 3.3 Pembelian Perlengkapan dan Penjualan... 48
Tabel 3.4 Pembelian Perlengkapan dan Penjualan Setelah
Dimasukkan Variabel Lag... 49
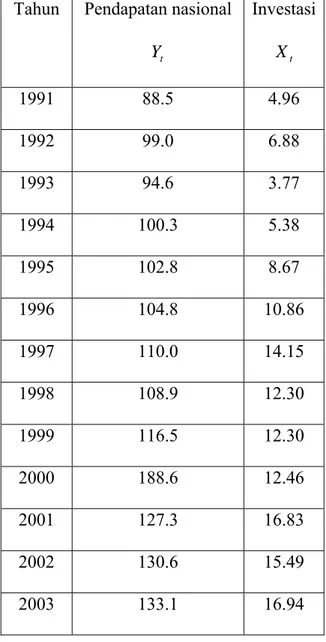
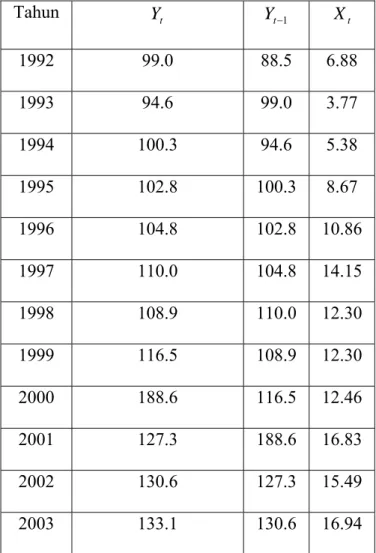
Tabel 3.5 Pendapatan Nasional dan Investasi ... 52
Tabel 3.6 Pendapatan Nasional dan Investasi ... 53
xvi
DAFTAR LAMPIRAN
Lampiran 1 Output Eviews metode Koyck ... 63
Lampiran 2 Output Eviews metode Almon ... 64
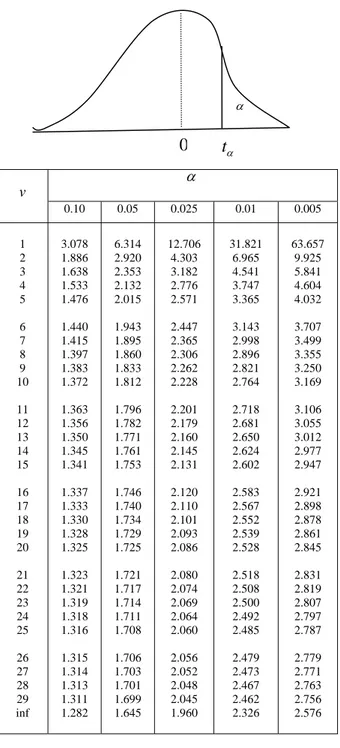
Lampiran 3 Tabel Nilai Kritik Sebaran t ... 65
1 BAB I PENDAHULUAN
A. Latar Belakang
Kehidupan manusia sehari-hari tidak pernah lepas dari pengamatan. Ketika
seseorang melihat atau mengamati suatu kejadian dalam suatu waktu sering
timbul pertanyaan apa yang akan terjadi pada waktu yang akan datang dan
bagaimana kejadian pada waktu sebelumnya. Begitu pula saat melihat suatu
kejadian di suatu tempat, muncul pertanyaan apa yang terjadi di daerah sekitarnya.
Pertanyaan menyangkut waktu tersebut mendasari munculnya suatu kajian runtun
waktu (time series analysis).
Runtun waktu merupakan serangkaian pengamatan terhadap suatu
peristiwa, kejadian, yang diambil dari waktu ke waktu, serta dicatat secara teliti
berdasarkan urutan waktu, kemudian disusun sebagai data statistik (Sutrisno,
1998: 353). Analisis runtun waktu merupakan analisis sekumpulan data dalam
suatu periode waktu yang lampau yang berguna untuk mengetahui atau
meramalkan kondisi masa mendatang. Hal ini didasarkan bahwa perilaku manusia
banyak dipengaruhi kondisi atau waktu sebelumnya sehingga dalam hal ini faktor
waktu sangat penting peranannya (Gujarati, 1995: 5).
Penganalisaan runtun waktu dahulu menjadi pertentangan antara dua
kelompok ahli yaitu para ahli ekonometrika dan para ahli runtun waktu. Para ahli
ekonometrika menganalisis data runtun waktu dengan metode yang berbeda
2
menformulasikan model regresi klasik untuk menganalisis perilaku data runtun
waktu, menganalisis tentang masalah simultanitas, dan kesalahan autokorelasi.
Sebaliknya, ahli runtun waktu membuat model perilaku runtun waktu dengan
mekanisme sendiri serta tidak begitu memperhatikan peranan variabel bebas X
dan variabel tak bebas Y. Perbedaan pendapat ini membuat para ahli
ekonometrika mengkaji ulang pendekatannya terutama dalam menganalisis runtun
waktu.
Ekonometrika merupakan suatu ilmu yang menganalisis fenomena
ekonomi dengan menggunakan teori ekonomi, matematika, dan statistika, yang
berarti teori ekonomi tersebut dirumuskan melalui hubungan matematika
kemudian diterapkan pada suatu data untuk dianalisis menggunakan metode
statistika (Awat, 1995: 3). Hal yang banyak mendapat perhatian dalam
ekonometrika adalah kesalahan pengganggu terutama dalam membuat perkiraan
atau estimasi. Model ekonometrika yang digunakan untuk mengukur hubungan
antara variabel-variabel dapat dinyatakan dalam bentuk model regresi linear.
Model regresi linear merupakan salah satu model ekonometrika yang hubungan
antar variabelnya satu arah, yang berarti variabel tak bebas ditentukan oleh
variabel bebas (Sumodiningrat, 1995: 135). Hubungan antara satu variabel bebas
X dengan variabel tak bebas Y dapat dimodelkan dengan Y =α+β X +ε atau beberapa variabel bebas X terhadap variabel tak bebas Y dapat dimodelkan
dengan : i in n i i i X X X X Y=β0+β1 1+β2 2+β3 3+K+β +ε .
3
Pada skripsi ini akan dibahas tentang model regresi linear yang
memperhitungkan pengaruh waktu, karena kebanyakan dari model regresi linear
kurang memperhatikan waktu. Data yang digunakan adalah data runtun waktu
(time series). Model regresi dengan menggunakan data runtun waktu tidak hanya
menggunakan pengaruh perubahan variabel bebas terhadap variabel tak bebas
dalam kurun waktu yang sama dan selama periode pengamatan yang sama, tetapi
juga menggunakan periode waktu sebelumnya. Waktu yang diperlukan bagi
variabel bebas X dalam mempengaruhi variabel tak bebas Y disebut bedakala
atau lag (Supranto, 1995: 188).
Model regresi yang memuat variabel tak bebas yang dipengaruhi oleh
variabel bebas pada waktu t, serta dipengaruhi juga oleh variabel bebas pada
waktu t−1, t−2 dan seterusnya disebut model dinamis distribusi lag, sebab pengaruh dari suatu atau beberapa variabel bebas X terhadap variabel tak bebas
Y menyebar (spread or distributed) ke beberapa periode waktu dengan
t t
t t
t X X X
Y =α +β0 +β1 −1+β2 −2 +K+ε . Model regresi yang memuat variabel tak bebas yang dipengaruhi oleh variabel bebas pada waktu t, serta dipengaruhi
juga oleh variabel tak bebas itu sendiri pada waktu t−1 disebut model
autoregressive dengan Yt =α +β0 Xt +β1Yt−1 +εt (Awat, 1995: 410).
Metode-metode yang digunakan dalam menentukan persamaan distribusi
lag dugaan antara lain metode Koyck, metode Almon, metode Jorgenson dan
metode Pascal. Pada skripsi ini hanya akan dibahas metode Koyck dan metode
Almon sebab kedua metode ini lebih mudah diterapkan dalam membuat
4
menentukan persamaan dinamis distribusi lag dugaan yang panjang beda kala
(lag) diketahui. Langkah pertama yang dilakukan adalah membuat persamaan
Almon yaitu : t t t t Z Z Z Yˆ =αˆ +αˆ0 0 +αˆ1 1 +αˆ2 2 dengan
∑
= − = k i t t X Z 0 1 0 ,∑
= − = k i t t iX Z 0 1 1 ,∑
= − = k i t t i X Z 0 1 2 2Selanjutnya, nilai-nilai αˆ,αˆ0 ,αˆ1,αˆ2 pada Yˆt =αˆ +αˆ0 Z0t +αˆ1Z1t +αˆ2 Z2t digunakan untuk mencari αˆ,βˆ0,βˆ1,βˆ2,K,βˆk dalam persamaan dinamis distribusi
lag dugaan dengan panjang beda kala (lag) sebesar k. Metode Koyck digunakan
untuk menentukan persamaan dinamis distribusi lag dugaan yang panjang beda
kala (lag) tidak diketahui. Langkah pertama yang dilakukan adalah membuat
persamaan Koyck yaitu :
( )
1 ˆ ˆ0 1 ˆ ˆ − + + − = t t t C X C Y Y α β )Selanjutnya, nilai-nilai αˆ,βˆ0,C) digunakan untuk mencari nilai k β β β β αˆ, ˆ , ˆ , ˆ , , ˆ 2 1
0 K dalam persamaan dinamis distribusi lag dugaan yang panjang
beda kala (lag) tidak diketahui.
Pada persamaan Koyck terdapat Yt−1 sebagai variabel bebas maka bersifat
autoregressive sehingga metode Koyck juga dapat digunakan untuk menentukan
persamaan dinamis autoregressive dugaan sedangkan persamaan hasil
transformasi Almon tidak bersifat autoregressive. Namun, setelah menggunakan
metode Koyck perlu dilakukan uji lanjutan dengan menggunakan uji statistik h
5
autoregressive. Uji statistik h Durbin-Watson perlu dilakukan karena adanya Yt−1
sebagai variabel bebas dalam model dinamis autoregressive kemungkinan
menyebabkan autokorelasi.
Keistimewaan dari model dinamis autoregressive dan model dinamis
distribusi lag adalah model tersebut telah membuat teori statis menjadi dinamis
karena model regresi yang biasanya mengabaikan pengaruh waktu, melalui model
autoregressive dan model dinamis distribusi lag waktu ikut diperhitungkan
(Supranto, 1995: 200). Oleh karena itu, model autoregressive dan model dinamis
distribusi lag sering disebut satu rangkaian dengan nama “Model Dinamis :
Autoregressive dan Distribusi Lag”.
B. Rumusan Masalah
Berdasarkan latar belakang, penulis dapat mengemukakan rumusan masalah
sebagai berikut :
1. Bagaimana menentukan persamaan dinamis distribusi lag dugaan dengan
metode Koyck dan metode Almon?
2. Bagaimana menentukan persamaan dinamis autoregressive dugaan dan
mendeteksi autokorelasi dengan statistik h Durbin-Watson?
6
C. Tujuan Penulisan
Tujuan penulisan skripsi ini adalah :
1. Menjelaskan tentang metode Koyck, metode Almon, dan uji statistik h
Durbin-Watson dalam menentukan persamaan dinamis : autoregressive dan
distribusi lag dugaan.
2. Menjelaskan tentang aplikasi model dinamis autoregressive dan distribusi lag.
D. Manfaat Penulisan
Berdasarkan rumusan masalah dan tujuan penulisan yang telah dikemukakan,
maka manfaat penulisan skripsi ini adalah :
1. Bagi Penulis
Dengan mengetahui cara menentukan persamaan dinamis : autoregressive dan
distribusi lag, diharapkan dapat menambah pengetahuan tentang analisis
regresi beserta aplikasinya.
2. Bagi Ilmu Pengetahuan
Penulisan ini dapat dijadikan salah satu referensi bagi pihak yang
7 BAB II
LANDASAN TEORI
A. DATA
Data merupakan bentuk jamak dari datum. Data merupakan kumpulan informasi yang diperoleh melalui pengamatan (Hasan, 2005: 12). Berdasarkan waktu pengambilannya data dibedakan menjadi 2 yaitu :
1. Data berkala (time series data)
Data berkala (time series data) adalah data yang terkumpul dari waktu ke
waktu untuk memberikan gambaran perkembangan suatu hal.
Contoh : Data perkembangan harga 9 bahan pokok selama 10 bulan terakhir yang dikumpulkan tiap bulan.
2. Data seleksi silang (cross section data)
Data seleksi silang (cross section data) merupakan data yang terkumpul dari
suatu waktu tertentu untuk memberikan gambaran keadaan atau kegiatan pada waktu itu.
Contoh : Sensus penduduk 1990.
B. Variansi Populasi
Variansi populasi adalah jumlah kuadrat selisih nilai data pengamatan dengan rata-rata hitung dibagi dengan banyaknya data pengamatan.
(
)
2 1 2 1∑
= − = N i i X N µ σ (2.1)8
Akar dari variansi populasi adalah simpangan baku populasi (σ) (Walpole, 1995: 33).
C. Matriks
Pada pembahasan berikut ini akan dikaji tentang matriks, transpose matriks, invers matriks dan operasi matriks.
1. Definisi 2.1 Matriks (Anton, 1987: 22)
Sebuah matriks adalah susunan segi empat siku-siku dari bilangan-bilangan. Suatu matriks A berukuran m×n adalah susunan mn bilangan real di dalam tanda kurung siku dan disusun dalam m baris dan n kolom sebagai berikut :
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = mn m m n n a a a a a a a a a K M M M L L 2 1 2 22 21 1 12 11 A
2. Definisi 2.2Transpose Matriks (Anton, 1987: 27).
Jika ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = mn m m n n ij a a a a a a a a a a K M M M L L 2 1 2 22 21 1 12 11 ] [
A adalah matriks berukuran m×n maka
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = mn n n m m T ij T a a a a a a a a a a K M M M L L 2 1 2 22 12 1 21 11 ] [ A dimana ji T ij a a = , 1≤i≤m, 1≤ j≤n.
9
3. Definisi 2.3Invers Matriks (Anton, 1987: 34).
Jika terdapat matriks A yang berukuran n×n dan matriks B yang berukuran n
n× sedemikian sehingga AB=BA=I maka matriks B disebut inversA. 4. Operasi Matriks
a. Penjumlahan Dua Matriks
Jika A=[aij] dan B=[bij] adalah matriks-matriks berukuran m×n maka B
A+ adalah matriks C=[cij] berukuran m×n, dengan cij =aij +bij,
m i≤ ≤ 1 , 1≤ j≤n. Diketahui matriks ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = mn m m n n a a a a a a a a a K M M M L L 2 1 2 22 21 1 12 11 A dan matriks ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = mn m m n n b b b b b b b b b K M M M L L 2 1 2 22 21 1 12 11 B sehingga ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + + + + = + = mn mn m m m m n n n n b a b a b a b a b a b a b a b a b a K M M M K K 2 2 1 1 2 2 22 22 21 21 1 1 12 12 11 11 B A C
10
b. Selisih Dua Matriks
Jika A=[aij] dan B=[bij] adalah matriks-matriks berukuran m×n maka Selisih antara A dan B adalah matriks D=[dij] dengan dij =aij −bij,
m i≤ ≤ 1 , 1≤ j≤n. Diketahui matriks ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = mn m m n n a a a a a a a a a K M M M L L 2 1 2 22 21 1 12 11 Α dan ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = mn m m n n b b b b b b b b b K M M M L L 2 1 2 22 21 1 12 11 B sehingga ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − − − − = − = mn mn m m m m n n n n b a b a b a b a b a b a b a b a b a K M M M K K 2 2 1 1 2 2 22 22 21 21 1 1 12 12 11 11 B A D c. Perkalian Matriks
Jika ]A=[aij adalah matriks berukuran m×p dan B=[bij] adalah matriks berukuran p×n dengan1≤i≤m 1≤ j≤n maka perkalian A
dan B adalah matriks C=[cij] yang berukuran m×n dengan
∑
= = + + + = p k kj ik pj ip i i j i ij a b a b a b a b c 1 2 2 1 1 K , 1≤i≤m, 1≤ j≤n11 Diketahui matriks ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = mp m m p p a a a a a a a a a K M M M L L 2 1 2 22 21 1 12 11 A dan matriks ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = pn p p n n b b b b b b b b b K M M M L L 2 1 2 22 21 1 12 11 B sehingga ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + + + + + + + = × = pn mp n m n m p mp m m pn p n n p p pn p n n p p b a b a b a b a b a b a b a b a b a b a b a b a b a b a b a b a b a b a K K K M M K L K K L K 2 2 1 1 1 21 2 11 1 1 2 12 1 21 1 2 21 22 21 21 1 2 12 1 11 1 1 21 12 11 11 B A C D. Regresi Linear
Regresi linear adalah regresi yang variabel bebasnya (variabelX )
berpangkat paling tinggi 1. Regresi linear dibedakan menjadi 2 yaitu : 1. Regresi Linear Sederhana
Regresi linear sederhana adalah regresi linear yang hanya melibatkan dua variabel yaitu variabel bebas X dan variabel tak bebas Y (Hasan, 2005:
250). Model regresi linear sederhana dari Y terhadapX ditulis dalam bentuk :
ε β α+ + = X Y dengan
Y : variabel tak bebas X : variabel bebas
α : intersep
β : koefisien regresi / slope
ε : kesalahan penggangu yang berarti nilai-nilai variabel lain tidak dimasukkan dalam persamaan, dengan ε ~
(
0;σ2)
N ) 2 . 2 (
12
2. Regresi Linear Berganda
Regresi linear berganda adalah regresi yang variabel tak bebasnya
( )
Y dihubungkan lebih dari satu variabel bebas(
X1, X2,X3,K,Xn)
(Hasan, 2005: 269).
Bentuk umum model regresi linear berganda : i in n i i i i X X X X Y =β0 +β1 1 +β2 2 +β3 3 +K+β +ε
( )
2.3 dengan iY : variabel tak bebas
0 β : intersep n β β β β1, 2, 3K, : koefisien regresi ik i i i X X X X 1, 2, 3K, : variabel bebas i
ε : kesalahan penggangu yang berarti nilai-nilai variabel lain tidak dimasukkan dalam persamaan, dengan ε ~
(
0;σ2)
N
i .
i : pengamatan ke-i
(
i=1,2,K,n)
n : ukuran sampel
( )
2.3 dapat diuraikan menjadi :n nn n n n n n n n n n X X X X Y X X X X Y X X X X Y ε β β β β β ε β β β β β ε β β β β β + + + + + + = + + + + + + = + + + + + + = K M K K 3 3 2 2 1 1 0 2 2 23 3 22 2 21 1 0 2 1 1 13 3 12 2 11 1 0 1
Apabila dituliskan dalam bentuk matriks menjadi :
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ n n nn n n n n n n X X X X X X X X X X X X Y Y Y ε ε ε β β β β β β M M M M M M M M 2 1 2 1 3 2 1 2 23 22 21 1 13 12 11 0 0 0 2 1
13
Secara ringkas dapat dituliskan : ε
B X
Y= + .
( )
2.4E. Analisis Korelasi
Analisis Korelasi adalah analisis yang dilakukan untuk mengetahui derajat hubungan linear antara suatu variabel dengan variabel yang lain (Algifari, 2000: 45). Ukuran statistik yang dapat menggambarkan hubungan antara suatu variabel dengan variabel yang lain adalah :
1. Koefisien Determinasi
Koefisien determinasi digunakan untuk mengetahui ada tidaknya hubungan antara dua variabel (Algifari, 2000: 45). Besarnya koefisien determinasi dapat dihitung dengan rumus :
( )
2 __ 2 2 1 ˆ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − − = Y Y Y Y r( )
2.5 dengan 2 r : koefisien determinasi Y : variabel tak bebas__
Y : rata-rata hitung dari nilai Y Yˆ : Y dugaan dengan Yˆ =αˆ+βˆX
Rumus
( )
2.5 digunakan untuk menghitung besarnya koefisien determinasi pada regresi linear sederhana.14
2. Koefisien Korelasi
Menurut Algifari (2000: 51) koefisien korelasi
( )
r dapat digunakan untuk :a. Mengetahui keeratan hubungan antara dua variabel.
Besarnya koefisien korelasi antara dua variabel adalah −1≤r ≤1. Jika dua variabel mempunyai nilai r =0 berarti antara dua variabel tidak ada hubungan tetapi jika dua variabel mempunyai r =+1atau 1r =− maka
dua variabel tersebut mempunyai hubungan sempurna. b. Menentukan arah hubungan antara dua variabel.
Tanda (+) dan (-) yang terdapat pada koefisien korelasi menunjukkan arah hubungan antara dua variabel.
Tanda (+) pada r menunjukkan hubungan yang searah atau positif.
Tanda (-) pada r menunjukkan adanya hubungan berlawanan arah atau
negatif.
Besarnya koefisien korelasi dapat ditentukan dengan rumus :
(
)
2 2( )
2 2 Y Y n X X n Y X XY n r ∑ − ∑ − ∑ − ∑ ∑ ∑ − ∑ =( )
2.6 denganr : besarnya koefisien korelasi X : variabel bebas
Y : variabel tak bebas
15
F. Metode Kuadrat Terkecil (Least Square Method)
Berikut ini adalah gambar persamaan regresi yang sebenarnya dan persamaan regresi taksiran.
Keterangan :
Persamaan regresi sebenarnya dinyatakan dengan Yi =α+β Xi Persamaan regresi dugaan dinyatakan dengan Yˆi =αˆ +βˆXi AA’ adalah garis regresi sebenarnya
BB’ adalah garis regresi dugaan
Titik P merupakan salah satu titik dari pengamatan data sampel i
e taksiran dari faktor gangguan εi
Metode kuadrat terkecil adalah metode yang digunakan untuk menaksir
β. Prinsip dasar metode kuadrat terkecil adalah meminimumkan jumlah kuadrat galat yaitu meminimumkan ∑ei2 (Suryanto, 1998: 140).
Untuk mendapatkan penaksir-penaksir bagi β, ditentukan dua vektor βˆ dan e
sebagai berikut : ei i ε i Yˆ B A A’ i i X Y =α +β Yi B’ Y P i
X
X i i X Yˆ =αˆ +βˆ16 k 1 0 β β β β ˆ ˆ ˆ ˆ M = dan n 2 1 e e e e M =
Persamaan hasil estimasi dapat ditulis : e β X Y= ˆ + β X Y e = − ˆ
( )
2.7 sehingga(
)(
)
(
)(
)
(
)(
)
β X X' ' β Y X' ' β ' β X' Y' Y Y' β X Y X' ' β Y' β X Y ' β X' Y' β X Y β X Y e e' ' ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ + − − = − − = − − = − − = β X X' ' β Y X' ' β 2 Y Y' e' e = − ˆ +ˆ ˆ( )
2.8Untuk meminimumkan e'e, dapat diperoleh dengan menurunkan secara parsial terhadap βˆ serta menyamakan turunan dengan 0.
( )
Y' X' β X' X' β X' X' Y' X' e' e β β = = + − = ∂ ∂ = ∂ ∂∑
∑
= = ˆ 0 ˆ 2 2 0 ˆ 0 ˆ 1 1 2 n i n i i e17
Selanjutnya kalikan kedua ruas dengan
(
X'X)
−1 diperoleh(
)
(
)
(
X'X)
X' β I Y X' X X' β X X' X X' Y X' β X X' 1 1 1 − − − = = = ˆ ˆ ˆ(
X'X)
X'Y βˆ = −1( )
9 . 2 denganX' : transpose dari matrik X
βˆ : penaksir koefisien regresi
Menurut (Sumodiningrat, 1995: 188) untuk menguji sifat-sifat taksiran parameter digunakan asumsi sebagai berikut :
1. E
( )
ε =0 2. E[
ε ε']
=σ
2 I Bukti : n ε ε ε ε M 2 1 = dan ε'= ε1 ε2 K εn 2 2 1 2 2 2 1 2 1 2 1 2 1 n n n n n ε ε ε ε ε ε ε ε ε ε ε ε ε ε ε ε' ε K M M M K K =18
[ ]
[ ]
[
]
[
]
[
]
[ ]
[
]
[
] [
]
[ ]
2 2 2 0 0 0 0 0 0 σ σ σ K M M M K K K M M M K K = = 2 n 2 n 1 n n 2 2 2 1 2 n 1 2 1 2 1 ε ε ε ε ε ε ε ε ε ε ε ε ε ε ε ε' ε E E E E E E E E E E[ ]
2 =σ2 i ε E dan E[ ]
εiεj =0(
i≠ j)
[ ]
I E 2 2 1 0 0 0 1 0 0 0 1 ' =σ = =σ K M M M K K ε εApabila asumsi-asumsi sudah dipenuhi maka estimasi yang diperoleh dengan metode kuadrat terkecil akan bersifat linear, tak bias, dan variansinya minimum yang dikenal dengan sifat Best, Linear, Unbiased estimator (BLUE). Sifat-sifat penaksir (estimator) dalam metode kuadrat terkecil adalah :
1. Linear (Linearity)
(
)
(
)
(
)
(
)
(
)
(
)
(
X'X)
Xε β Xε X X' Iβ Xε X X' Xβ X' X X' ε Xβ X' X X' Y X' X X' β 1 1 1 1 1 1 − − − − − − + = + = + = + = = ˆ19
2. Tak bias (Unbiasedness)
Sifat tak bias berarti nilai harapan dari estimator yaitu E[βˆ]=β.
(
)
[ ]
[
(
)
]
(
X'X)
X'[ ]
ε β ε X' X X' β ε] X' X X' [β β 1 1 1 E E E E E − − − + = + = + = ] ˆ [ Karena E[ ]
ε =0 maka E[βˆ]=βˆJadi, βˆ merupakan penaksir tak bias. 3. Variansi minimum
Estimator variansi minimum adalah estimator dengan variansi terkecil di antara semua estimator untuk koefisien yang sama. Menurut Sudjana (1996 : 199) jika βˆ1 dan βˆ merupakan dua estimator untuk 2 β dengan
( )
βˆ1 Var( )
βˆ2Var < maka βˆ1 merupakan estimator bervariansi minimum.
( )
βˆ1Var dapat dicari sebagai berikut :
( ) (
)
(
)(
)
(
)
{
}
{
(
)
}
[
]
(
)
[ ]
(
)
(
)
(
)
(
)
(
)
(
)
1 1 1 1 1 1 1 1 1 X X' X X' X X' X X' X X' X I X' X X' X X' X ε ε X' X X' ε X' X X' ε X' X X' β β β β β β β − − − − − − − − − = = = = = ⎥⎦ ⎤ ⎢⎣ ⎡ − − = ⎥⎦ ⎤ ⎢⎣ ⎡ − = 2 2 2 ' 1 1 2 1 1 ' ' ˆ ˆ ˆ ˆ ε ε ε σ σ σ E E E E Var20
Misalkan βˆ2 =
[
(
X'X)
−1 +B]
Y dengan2
βˆ : penaksir alternatif yang linear dan tak bias bagiβ B : matriks konstanta yang diketahui
(
)
[
]
(
)
[
]
(
)
(
)
(
)
(
)
[ ]
[
(
)
(
)
(
)
]
(
)
(
)
[
]
( )
0 ˆ ˆ = + = + + + = + + + = + + + = + + = + = − − − − − − ε B X B β ε B Xβ B ε X' X X' Xβ X' X X' ε Xβ B ε Xβ X' X X' β ε Xβ B ε Xβ X' X X' ε Xβ B X' X X' Y B X' X X' β 1 1 1 2 1 1 1 2 E karena E E EOleh karena diasumsikan βˆ merupakan estimator tak bias untuk 2 β maka
[ ]
βˆ2 =βE atau dengan kata lain BXB merupakan matriks 0.
Variansi dari penaksir alternatif tersebut dapat dicari sebagai berikut :
( )
(
)
(
)(
)
(
)
[
]
{
}
{
[
(
)
]
}
[
]
(
)
[
]
(
)
{
}
{
[
(
)
]
(
)
}
[
]
(
)
(
)
{
}
[
(
)
(
)
{
}
]
(
)
{
}
{
(
)
}
[
]
(
)
{
}
{
(
)
}
[
]
(
)
{
}
{
(
)
}
[
]
(
)
{
}
[ ]
{
(
)
}
(
)
{
}
{
(
)
}
(
)
(
)
(
)
(
)
{
}
(
)
{
}
karena 0 0 karena ' ˆ ˆ ˆ ˆ 2 2 2 ' ' ' = + = + + + = + + = + + = + + = + + = = + + = − + + + − + + + = − + + − + + = − + − + = − − = ⎥⎦ ⎤ ⎢⎣ ⎡ − = − − − − − − − − − − − − − − − − − − − − − − − X B B' B X X' B' B B' X' X X' X X' X B X X' X X' X X' B' X X X' B X' X X' I B' X X X' ε' ε E B X' X X' B' X X X' ε' ε B X' X X' B' ε' X X X' ε' ε B ε X' X X' X B ε B ε X' X X' ε B ε X' X X' β Bε β X B ε X' X X' β X X' X X' β Bε β X B ε X' X X' β X X' X X' β ε β X B X' X X' β ε β X B X' X X' β Y B X' X X' β Y B X' X X' β β β β β β β 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 ' 1 1 1 1 2 2 2 2 2 ε ε ε σ σ σ E E E E E E E E Var21
( )
βˆ2 = 2(
X'X)
−1 +σε2BB'ε
σ
Var
Jadi, Var
( )
βˆ1 ≤Var( )
βˆ2 sehingga terbukti memiliki variansi minimum.G. Kesalahan Standar Estimasi (Standar Error Of Estimate)
Proses selanjutnya dalam analisis regresi adalah menentukan ketepatan persamaan yang dihasilkan untuk mengestimasi nilai variabel tak bebas dengan metode kuadrat terkecil. Kesalahan standar estimasi (standar error of estimate)
yang dinotasikan dengan Se. Besarnya kesalahan standar estimasi menunjukkan
ketepatan persamaan estimasi untuk menjelaskan nilai variabel tak bebas yang sesungguhnya. Semakin kecil nilai kesalahan standar estimasi makin tinggi ketepatan persamaan estimasi, sebaliknya jika semakin besar nilai kesalahan standar estimasi makin rendah ketepatan persamaan estimasi (Sugiarto, 1993: 20). Cara mengetahui ketepatan persamaan estimasi dapat digunakan kesalahan standar estimasi (standar error of estimate) ditentukan dengan rumus :
2 2 − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ∧ n Y Y Se
(
2.10)
Rumus alternatif yang dapat digunakan untuk menentukan kesalahan standar estimasi (standar error of estimate) adalah sebagai berikut :
2 ˆ ˆ 2 − ∑ − ∑ − ∑ = n XY Y Y Se α β
(
2.11)
Rumus
(
2.10)
dan(
2.11)
digunakan untuk menghitung besarnya kesalahan standar estimasi (standar error of estimate) pada model regresi linear sederhana22
yaitu : Y =α +β X +ε. Nilai 2 dalam n−2 menunjukkan banyaknya parameter dalam model regresi linear sederhana yaitu α dan β sehingga dalam rumus
(
2.10)
dan(
2.11)
dibagi dengan n−2. H. Asumsi KlasikModel regresi yang diperoleh dari metode kuadrat terkecil merupakan model regresi yang menghasilkan estimator linear tak bias yang terbaik (BLUE). Menurut Supranto (1987: 281), kondisi BLUE ini akan terjadi jika dipenuhi beberapa asumsi klasik sebagai berikut :
1. Non-Multikolinearitas
Non-Multikolineritas berarti antara variabel bebas yang satu dengan variabel bebas yang lain dalam model regresi tidak saling berhubungan secara sempurna atau mendekati sempurna.
2. Homoskedasitisitas Homoskedasitisitas berarti
( )
ε =( )
ε =σ2 j i E Var . 3. Non-AutokorelasiNon-Autokorelasi berarti model tidak dipengaruhi waktu yang berarti
(
)
i jCov εi,εj =0, ≠ . Menurut model asumsi klasik, nilai suatu variabel saat ini tidak akan berpengaruh terhadap nilai variabel lain pada masa yang akan datang.
4. Nilai rata-rata kesalahan pengganggu (error) populasi adalah 0 atau E
( )
εi =0 untuk i = 1, 2, ..., n.23
5. Variabel bebas adalah non-stokastik yang berarti tetap dari sampel ke sampel atau tidak berkorelasi dengan kesalahan pengganggu εt.
6. Distribusi kesalahan (error) adalah normal ε ~
(
0;σ2)
N
i atau kesalahan pengganggu mengikuti distribusi normal dengan rata-rata 0 dan variansi σ2.
I. Penyimpangan Asumsi Klasik
Penyimpangan terhadap asumsi-asumsi dasar tersebut dalam regresi akan menimbulkan beberapa masalah seperti kesalahan standar estimasi untuk masing-masing koefisien kemungkinan akan sangat besar, pengaruh masing-masing-masing-masing variabel bebas tidak dapat dideteksi atau variansinya tidak minimum lagi. Akibatnya, estimasi koefisiennya kurang akurat lagi yang akhirnya dapat menimbulkan kesimpulan yang salah. Penyimpangan dari asumsi dasar tersebut meliputi :
1. Multikolinearitas
Definisi 2.4 ( Supranto, 1989: 293 )
Multikolinearitas berarti bahwa antar variabel bebas yang terdapat dalam model regresi memiliki hubungan sempurna atau mendekati sempurna atau dengan kata lain koefisien korelasinya tinggi bahkan mendekati 1.
2. Heteroskedastisitas
Definisi 2.5 ( Supranto, 1989: 281 )
Heteroskedastisitas berarti variansi variabel Y dalam model tidak sama untuk
24
3. Autokorelasi
Definisi 2.6 ( Supranto, 1989: 285 )
Autokorelasi berarti terdapatnya korelasi antaranggota sampel Y atau data
pengamatan diurutkan berdasarkan waktu. Autokorelasi biasanya muncul pada regresi yang menggunakan data berkala (time series) karena dalam data
berkala (time series), data masa sekarang dipengaruhi oleh data pada
25 BAB III PEMBAHASAN
Model regresi linear yang sering ditemui biasanya tidak memperhatikan pengaruh waktu karena pada umumnya model regresi linear cenderung mengasumsikan bahwa pengaruh variabel bebas terhadap variabel tak bebas terjadi dalam kurun waktu yang sama. Namun, dalam model regresi linear juga terdapat model regresi yang memperhatikan pengaruh waktu. Waktu yang diperlukan bagi variabel bebas X dalam mempengaruhi variabel tak bebas Y
disebut bedakala atau “a lag” atau “a time lag” (Supranto, 1995: 188). Ada 2
macam model regresi linear yang memperhatikan pengaruh waktu yaitu : 1. Model Dinamis Distribusi Lag
Suatu variabel tak bebas apabila dipengaruhi oleh variabel bebas pada waktu t, serta dipengaruhi juga oleh variabel bebas pada waktu t−1, t−2 dan seterusnya disebut model dinamis distribusi lag. Model dinamis distribusi lag ada 2 jenis yaitu :
a. Model InfiniteLag
Model : Yt =α +β0 Xt +β1 Xt−1+β2 Xt−2 +K+εt
( )
3.1Model
( )
3.1 disebut model infinite lag sebab panjang beda kalanya tidak26
b. Model FiniteLag
Model : Yt =α+β0 Xt+β1Xt−1+β2 Xt−2 +K+βk Xt−k +εt
( )
3.2Model
( )
3.2 disebut model finite lag sebab panjang beda kalanyadiketahui yaitu sebesar k. 2. Model Dinamis Autoregressive
Apabila variabel tak bebas dipengaruhi oleh variabel bebas pada waktu
t, serta dipengaruhi juga oleh variabel tak bebas itu sendiri pada waktu t−1 maka model tersebut disebut autoregressive dengan
t t t
t X Y
Y =α+β0 +β1 −1+ε .
A. Metode-Metode dalam Menentukan Persamaan Dinamis Distribusi Lag Dugaan
Dua metode yang dapat digunakan untuk menentukan persamaan dinamis distribusi lag dugaan adalah :
1. Metode Koyck
Metode Koyck didasarkan asumsi bahwa semakin jauh jarak lag variabel
bebas dari periode sekarang maka semakin kecil pengaruh variabel lag terhadap
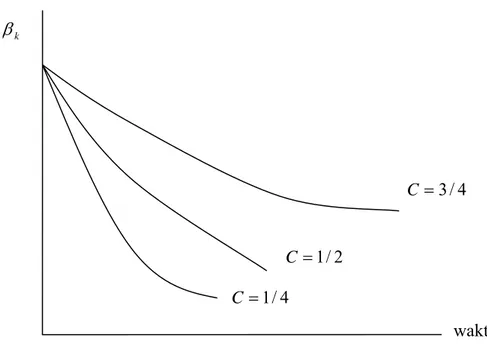
variabel tak bebas. Koyck mengusulkan suatu metode untuk memperkirakan model dinamis distribusi lag dengan mengasumsikan bahwa semua koefisien β
mempunyai tanda sama. Koyck menganggap bahwa koefisien menurun secara geometris sebagai berikut :
k k β0C
27
dengan :
C : rata-rata tingkat penurunan dari distribusi lag dengan nilai 0<C <1 C
−
1 : kecepatan penyesuaian.
( )
3.3 mempunyai arti bahwa nilai setiap koefisien β lebih kecil dengan nilai sebelumnya atau yang mendahuluinya(
0<C <1)
. Secara grafis, dapat dilihat pada gambar sebagai berikut :Gambar 3.1 Penurunan Koefisien β dalam model Koyck
( )
3.3 apabila diuraikan akan menjadi :M 3 0 3 2 0 2 0 1 0 0 C C C β β β β β β β β = = = =
( )
3.4Dalam prakteknya Koyck menggunakan model
( )
3.1 .Sebagai akibat dari
( )
3.4 model( )
3.1 dapat dituliskan menjadi : t t t t t X CX C X Y =α +β0 +β0 −1 +β0 2 −2+K+ε .( )
3.5 4 / 1 = C 2 / 1 = C 4 / 3 = C k β waktu28
Model
( )
3.5 sukar digunakan untuk memperkirakan koefisien-koefisien yang banyak sekali dan juga parameter C yang masuk ke dalam model dalam bentuk yang tidak linear. Akhirnya Koyck mencari jalan keluar dengan mengambil beda kala 1 periode berdasarkan( )
3.5 yaitu :1 3 2 0 2 0 1 0 1 − − − − − = + t + t + t + + t t X CX C X Y α β β β K ε .
( )
3.6( )
3.6 dikalikan dengan C diperoleh :1 3 3 0 2 2 0 1 0 1 − − − − − = + t + t + t + + t t C C X C X C X C Y C α β β β K ε .
( )
3.7( )
3.5 dikurangi( )
3.7 menjadi :(
)
0(
1)
1 1 − − = − + + − − t t t t t CY C X C Y α β ε ε .( )
3.8Secara umum
( )
3.8 dapat dituliskan menjadi :(
)
t t tt C X C Y V
Y =α 1− +β0 + −1+
( )
3.9dengan Vt =εt−Cεt−1.
Prosedur sampai ditemukannya model
( )
3.9 dikenal dengan nama Transformasi Koyck. Model( )
3.9 inilah yang disebut dengan model Koyck.Pada model
( )
3.1 parameter α dan β yang diperkirakan banyaknya tak terhingga, sedangkan pada model( )
3.9 lebih sederhana karena hanya memperkirakan tiga parameter yaitu α , β, dan C. Nilai α , β, dan C selanjutnya digunakan untuk menetukan koefisien distribusi lag dugaan yaitudengan rumus : k k β0C
β = . Namun, ada hal yang harus diperhatikan dalam transformasi Koyck yaitu adanya Yt−1 yang diikutsertakan sebagai salah satu
29
2. Metode Almon
Metode Koyck memang banyak digunakan dalam distribusi lag.
Penerapan dengan metode Koyck berdasarkan asumsi bahwa koefisien β menurun secara geometris sepanjang beda kala (lag). Namun, apabila diagram
pencar antara β dengan lag itu naik kemudian menurun maka metode Koyck
tidak dapat diterapkan. Gambar berikut ini akan menunjukkan perubahan koefisien β.
Gambar 3.2 Perubahan Koefisien β Gambar 3.3 Perubahan Koefisien β
30
Model yang digunakan dalam metode Almon adalah model finite lag sebagai
berikut : t k t k t t t t X X X X Y =α +β0 +β1 −1+β2 −2 +K+β − +ε
(
3.10)
atau t k i i t i t X Y =α +∑
β +ε =0 − .(
3.11)
Berdasarkan teori matematik yang dikenal dengan nama Weir-Strass’s Theorem, Almon berasumsi bahwa βi dapat didekati oleh suatu polinomial dalam
i yang memiliki derajat, dengan i merupakan panjangnya beda kala (lag).
Polinomial tersebut bisa berderajat 0, 1, 2, … dst. Apabila scatter diagram digambarkan seperti gambar 3.2 maka model bisa dituliskan sebagai berikut :
2 2 1 0 i i i α α α β = + + .
(
3.12)
(
3.12)
merupakan polinomial dalam i yang kuadratik atau berpangkat dua(second-degree polynomial in i).
Namun, apabila koefisien β mengikuti gambar 3.4 maka model bisa dituliskan sebagai berikut : 3 3 2 2 1 0 i i i i α α α α β = + + + .
(
3.13)
(
3.13)
merupakan polinomial dalam i yang berpangkat tiga (third-degree polynomial in i).Secara umum, model dituliskan sebagai berikut : m m i α α i α i α i β = + + 2 +K+ 2 1 0 .
(
3.14)
31
(
3.14)
merupakan polinomial dalam i yang berpangkat m (m-degree polynomial in i) dengan m<k (panjang beda kala maksimum).Almon mengasumsikan bahwa polinomial berpangkat dua adalah yang paling tepat digunakan.
Apabila
(
3.12)
disubstitusikan ke(
3.11)
maka diperoleh :(
)
∑
= − + + + + = k i t t t i i X Y 0 1 2 2 1 0 α α ε α α∑
∑
∑
= − = − = − + + + + = k i t k i t k i t t iX i X X 0 0 1 2 0 1 1 1 0 α ε α α(
3.15)
Apabila didefinisikan :∑
= − = k i t t X Z 0 1 0∑
= − = k i t t iX Z 0 1 1(
3.16)
∑
= − = k i t t i X Z 0 1 2 2 maka(
3.15)
menjadi : t t t t t Z Z Z Y =α +α0 0 +α1 1 +α2 2 +ε(
3.17)
Apabila dituliskan dengan persamaan regresi dugaan menjadi : t
t t
t Z Z Z Yˆ =αˆ+αˆ0 0 +αˆ1 1 +αˆ2 2 .
Model
(
3.17)
dapat diperkirakan koefisiennya dengan metode kuadrat terkecil. Perkiraan α) dan αi yang diperoleh akan mempunyai sifat-sifat yang diinginkan asalkan kesalahan pengganggu εt memenuhi asumsi dari model linear yang32
klasik. Setelah semua αi diperkirakan dari
(
3.17)
, koefisien βˆ dapat dihitung berdasarkan rumus(
3.14)
sebagai berikut :0 0 ˆ ˆ α β = 2 1 0 1 ˆ ˆ ˆ ˆ α α α β = + + 2 1 0 2 ˆ 2ˆ 4ˆ ˆ α α α β = + + 2 1 0 3 ˆ 3ˆ 9ˆ ˆ α α α β = + + M 2 2 1 0 ˆ ˆ ˆ ˆ α α α βk = +k +k
(
3.18)
dengan 0 ˆ β merupakan perkiraan β0 i βˆ merupakan perkiraan i β k i=1,2,K,Sebelum menerapkan metode Almon, harus melakukan langkah-langkah sebagai berikut :
1. Menentukan panjang maksimum dari beda kala (k).
Hal ini merupakan kelemahan terbesar dalam teknik Almon. harus memutuskan panjangnya beda kala maksimum (k) dengan tepat berdasarkan
anggapan, pengalaman, maupun dasar teori yang sudah memperhitungkan kondisi dan situasi.
2. Menentukan nilai m.
Setelah menentukan nilai k, m juga harus ditentukan, m merupakan derajat atau pangkat polinomial (degree of the polynomial). Derajat atau
33
pangkat polinomial harus paling sedikit lebih besar satu dibandingkan dengan banyaknya titik belok dalam kurva yang menghubungkan βi dengan i.
Misalkan gambar
( )
3.2 dan( )
3.3 hanya ada satu titik belok, sehingga polinomial yang cocok digunakan adalah polinomial berpangkat dua. Namun, prakteknya banyaknya titik belok seringkali tidak diketahui sehingga m biasanya ditentukan secara subjektif yaitu dengan menggunakan asumsi umum2 2 1
0 i i
i α α α
β = + + seperti yang dilakukan Almon. Kelebihan metode Almon :
1. Almon memberikan metode yang fleksibel yaitu mempersatukan berbagai struktur beda kala, yang berarti bahwa koefisien β bisa naik dan bisa turun sedangkan dalam metode Koyck sangat kaku karena koefisien β harus menurun secara geometris.
2. Metode Almon tidak perlu mengkhawatirkan tentang adanya variabel tak bebas beda kala sebagai suatu variabel bebas baik dalam model maupun persoalan yang timbul dalam estimasi.
B. Metode dalam Menentukan Persamaan Dinamis Autoregressive Dugaan Pada pembahasan model dinamis distribusi lag dikenal model Koyck yaitu :
(
1−)
+ 0 + −1+(
− −1)
= t t t t
t C X CY C
Y α β ε ε
(
3.19)
Model
(
3.19)
mempunyai bentuk sama dengan model dinamis autoregressive :t t t
t X Y V
Y =α0 +α1 +α2 −1 +
(
3.20)
34
Namun, metode kuadrat terkecil tidak dapat digunakan dalam persamaan dinamis
autoregressive dugaan karena :
1. Adanya variabel-variabel bebas yang stokastik. 2. Adanya autokorelasi.
Oleh karena itu, untuk mengetahui adanya autokorelasi dalam model dinamis
autoregressive perlu mengenali sifat-sifat Vt terlebih dahulu.
Asumsikan bahwa εt atau kesalahan pengganggu asli memenuhi asumsi klasik antara lain :
1. Homoskedastisitas
( )
ε =( )
=σ2 j i E eVarian , sama untuk semua kesalahan penggangu. 2. Non-Autokorelasi
(
)
i j Cov εi,εj =0, ≠Berdasarkan asumsi tentang εt, jika Vt adalah autokorelasi maka harus
dibuktikan bahwa :
(
)
2 1 Cσ V V E t t− =−(
3.21)
Bukti :Misalnya dalam model Koyck ada kesalahan penggangu Vt =
(
εt −Cεt−1)
. Adanya E(
VtVt−1)
maka ada Yt−1 muncul dalam model Koyck sebagai variabel bebas, sehingga Yt−1 tersebut akan berkorelasi dengan kesalahan pengganggut