BAB II
LANDASAN TEORI
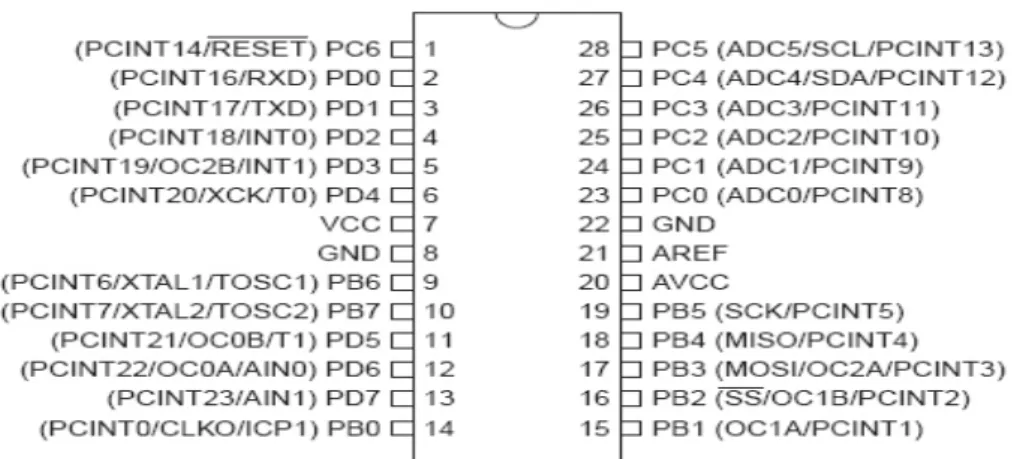
2.1. Mikrokontroller AVR ATmega328
Mikrokontroler adalah suatu terobosan dalam teknologi mikroprosesor dan mikrokomputer. Bedanya, mikrokontroler hanya bisa digunakan untuk menangani suatu aplikasi tertentu. Perbedaan lain terletak pada perbandingan RAM dan ROM. Komputer mempunyai RAM dan ROM yang besar, tetapi pada mikrokontroler sangat terbatas. ROM digunakan oleh mikrokontroller untuk menyimpan program sedangkan RAM digunakan untuk menyimpan data sementara. Mikrokontroller terdiri dari ALU (Arithmetic and Logical Unit), CU (Control Unit), PC (Program Counter), SP (Stack Pointer), register-register, sebuah rangkaian pewaktu dan rangkaian penyela (interrupt). Mikrokontroler juga dilengkapi dengan beberapa piranti pendukung lain seperti ROM (Read Only Memory), RAM (Random Access Memory), dekoder, port komunikasi input/output serial dan pararel, juga beberapa tambahan khusus seperti interrupt handler dan timer/counter.
AVR merupakan seri mikrokontroller CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving. Beberapa diantaranya mempunyai ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
Gambar 2.2 Blok Diagram Mikrokontroller ATmega328
2.2. Arduino Duemilanove
Dalam beberapa tahun terakhir, mikrokontroler telah menjadi lebih murah dan lebih mudah digunakan,hal ini memungkinkan terciptanya alat yang lebih baik. Arduino adalah sebuah trobosan baru dalam dunia elektronika, khususnya mikrokontroller. Kemajuan yang dibuat dengan Arduino membawa alat ini satu langkah lebih dekat bagi pemula, memungkinkan orang untuk memulai sebuah perancangan sistem kontrol dengan lebih mudah menggunakan Arduino. Arduino adalah sebuah kit elektronik yang dirancang khusus untuk memudahkan setiap
orang dalam belajar atau mengembangkan perangkat elektronik yang dapat berinteraksi dengan bermacam-macam sensor dan pengendali. Saat ini Arduino sangat populer di seluruh dunia. Banyak pemula yang belajar mengenal robotika dan elektronika lewat Arduino karena mudah dipelajari. Bahasa yang dipakai dalam Arduino adalah bahasa C yang disederhanakan dengan bantuan library-library Arduino.
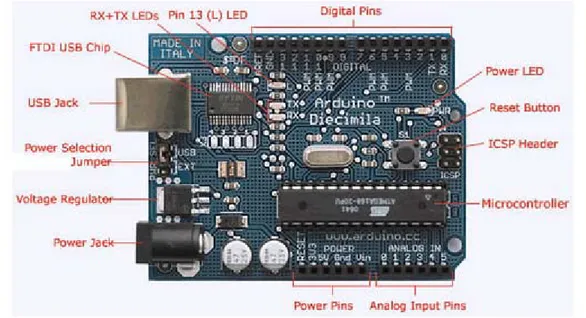
Gambar 2.3 Arduino Duemilanove
Gambar diatas merupakan salah satu gambar dari versi Arduino, yaitu Arduino Duemilanove. Arduino Duemilanove ‘2009’ adalah board berbasis mikrokontroler ATmega168 atau ATmega328. ia memiliki 14 digital input / output pin (dimana 6 dapat digunakan sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack listrik, ICSP header, dan tombol reset. Ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau listrik dengan adaptor AC-DC atau baterai
untuk memulai. Duemilanove dibangun tahun 2009 di Italia dan diberi nama setelah tahun peluncurannya.
2.2.1. Power
Arduino Duemilanove dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Eksternal (non-USB) listrik dapat berasal baik dari AC-DC adaptor atau baterai. Board ini dapat beroperasi pada pasokan eksternal dari 6 sampai 20 volt. Jika diberikan dengan kurang dari 7V, bagaimanapun, pin 5V dapat menyediakan kurang dari lima volt dan board mungkin tidak stabil. Jika menggunakan lebih dari 12V, regulator tegangan dapat terlalu panas dan merusak board. Kisaran yang direkomendasikan adalah 7 sampai 12 volt.
Fungsi dari masing-masing pin power adalah sebagai berikut :
¾ VIN : Tegangan input ke papan Arduino ketika itu menggunakan sumber
daya eksternal (sebagai lawan 5 volt dari koneksi USB atau sumber daya dari luar lainnya).
¾ 5V: Catu daya digunakan untuk daya mikrokontroler dan komponen lain
pada board. Hal ini dapat berasal baik dari VIN melalui on-board regulator, atau diberikan oleh USB atau power suplay 5V lainnya.
¾ 3v3 : Sebuah pasokan 3,3 volt yang dihasilkan oleh chip FTDI on-board. Menarik arus maksimum 50 mA.
2.2.2. Memori
ATmega168 memiliki 16 KB dari memori flash untuk menyimpan kode (2 KB digunakan untuk bootloader), ATmega328 memiliki 32 KB, (juga dengan 2 KB digunakan untuk bootloader). ATmega168 memiliki 1 KB dari SRAM dan 512 byte EEPROM (yang dapat dibaca dan ditulis dengan EEPROM library), ATmega328 memiliki 2 KB SRAM dan 1 KB EEPROM.
2.2.3. Input dan Output
Setiap 14 pin digital pada Duemilanove dapat digunakan sebagai input
atau output, menggunakan fungsi pinMode , digitalWrite , dan digitalRead. Mereka beroperasi di 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor internal pull-up 20-50 kΩ. Selain itu, beberapa pin memiliki fungsi khusus:
¾ Serial: 0 (RX) dan 1 (TX) : Digunakan untuk menerima (RX) dan
mengirimkan (TX) TTL data serial. Pin ini terhubung ke pin yang sesuai dari FTDI USB-to- TTL Serial chip.
¾ Interupsi Eksternal 2 dan 3 : Pin ini dapat dikonfigurasi untuk memicu
interupsi pada nilai yang rendah.
¾ PWM: 3, 5, 6, 9, 10, dan 11 : Menyediakan 8-bit output PWM dengan
fungsi. analogWrite.
¾ SPI: 10 (SS), 11 (mosi), 12 (MISO), 13 (SCK) : Pin ini mendukung
¾ LED: 13 : Disini membangun LED terhubung ke digital pin 13. Ketika pin bernilai TINGGI, LED menyala, ketika pin RENDAH, LED dimatikan.
Duemilanove memiliki 6 input analog, masing-masing yang menyediakan 10 bit dari resolusi (yaitu 1024 nilai yang berbeda). Secara default mereka mengukur dari tanah sampai 5 volt, meskipun adalah mungkin untuk mengubah batas atas dari jangkauan mereka menggunakan pin Aref dan fungsi analogReference. Ada beberapa pin lainnya didalam board ini :
¾ Aref : Tegangan referensi untuk input analog. Digunakan dengan
analogReference.
¾ Reset : Bawa baris ini RENDAH untuk me-reset mikrokontroler. Biasanya
digunakan untuk menambahkan tombol reset untuk perisai yang menahan salah satu pada board.
2.2.4. Komunikasi
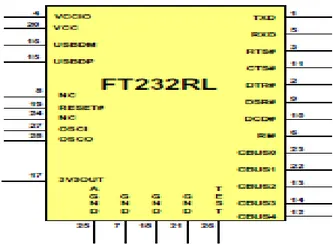
Arduino Duemilanove memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. Pada ATmega328 menyediakan (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah FTDI FT232RL pada saluran komunikasi serial board ini melalui USB dan driver FTDI (disertakan dengan perangkat lunak Arduino) menyediakan port com virtual untuk perangkat lunak pada komputer. Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data tekstual sederhana yang harus dikirim ke dan dari board Arduino. RX dan TX LED pada board arduino akan
berkedip ketika data sedang dikirim melalui chip FTDI dan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah perpustakaan Software Serial memungkinkan untuk komunikasi serial pada setiap pin digital Duemilanove itu. ATmega168 dan ATmega328 juga mendukung I2C (TWI) dan SPI komunikasi.
Gambar 2.4 Konfigurasi pin FTDI FT232RL
I2C (Inter Intergrated Circuit) adalah teknik transfer data antar IC procecor dengan IC pendukungnya yang dikembangkan oleh Philips. I2C termasuk jenis komunikasi serial dengan tipe protokol Synchronous, dimana setiap bit data masuk atau data keluar seirama atau sinkron dengan perubahan clock. Hal ini sangat beda dengan RS-232 dan tipe potrocol asynchronous yang lain yang tidak mempunyai clock, akan tetapi pada tipe asynchronous data masuk dan data keluar berdasarkan pada kecepatan tertentu yang konstan.
I2C versi 1.0 dikenalkan oleh Philips pada tahun 1992, direvisi menjadi versi 2.0 pada tahun 1998, setahun kemudian direvisi lagi menjadi versi 2.1
Komunikaasi data secaara I2C dilaakukan melaalui dua saluuran, masinng-masing aadalah • saaluran data ssecara seri ((SDA) = Seerial Data
• saaluran clockk (SCL) = Serial Clock
kedua salu IC I2C un (master) d I2C yang Yang bert mengenda
uran ini dik ntuk berbaga dan anak bu g memulai tindak sebag alikan I2C B kenal sebaga ai macam k uah (slave) transfer gai master Bus. ai I2C Bus keperluan. I ), yang dim data dan adalah Mik yang dipak C-IC I2C it maksud deng yang mem krokontroler kai menghu tu dibedaka gan induk mbangkitkan r / Kompute ubungkan ba an menjadi i adalah pera n clock (S er yang ber anyak induk alatan SCK). rtugas Co menghubu microcont ontoh kone ungkan 2 IC troller yang G eksi I2C C AT24C02 berfungsi s Gambar 2.5 Bus pad dan 1 IC P sebagai mas Skematik I da Gamba PCF8574, I2 ster. I2C ar diatas 2C bus ini d dipakai u dikendalikan untuk n oleh
2.2.5. Pemrograman
Duemilanove Arduino dapat diprogram dengan perangkat lunak Arduino (download). Pilih "Arduino Diecimila atau Duemilanove w atau ATmega168" atau "Arduino Duemilanove w atau ATmega328" dari Tools> menu board sesuai dengan mikrokontroler pada board sesuai tipe arduino yang dipakai. ATmega168 atau ATmega328 pada Duemilanove Arduino dilengkapi dengan bootloader yang memungkinkan Anda untuk meng-upload kode baru tanpa menggunakan programmer hardware eksternal. Ini berkomunikasi menggunakan protokol STK500 asli.
2.2.6. Perangkat Lunak (Software Reset)
Duemilanove Arduino dirancang dengan cara yang memungkinkan untuk diatur ulang oleh perangkat lunak yang berjalan pada komputer yang terhubung. Salah satu perangkat keras flow kontrol (DTR) dari FT232RL terhubung ke line reset dari ATmega168 atau ATmega328 melalui kapasitor 100 nanofarad. Perangkat lunak Arduino memungkinkan kita untuk meng-upload kode dengan hanya menekan tombol upload pada menu promt pada programmer Arduino. Ini berarti bahwa bootloader dapat memiliki waktu lebih pendek, seperti penurunan DTR dapat terkoordinasi dengan baik dengan dimulainya upload.
Pengaturan ini memiliki implikasi lain. Ketika Duemilanove terhubung ke salah satu komputer yang menjalankan Mac OS X atau Linux, setiap kali me-reset sambungan dibuat untuk perangkat lunak ini (melalui USB). Untuk ini setengah detik atau lebih, bootloader berjalan pada Duemilanove tersebut. Sementara itu
diprogram untuk mengabaikan data, itu akan mencegah beberapa byte pertama dari data yang dikirim ke board arduino.
2.2.7. Perlindungan USB
Duemilanove Arduino memiliki polyfuse reset yang melindungi port USB komputer Anda dari hubung singkat dan arus lebih. Meskipun kebanyakan komputer memberikan perlindungan internal mereka sendiri, sekering memberikan perlindungan tambahan. Jika lebih dari 500 mA diterapkan ke port USB, sekering otomatis akan memutus sambungan sampai hubung singkat atau arus lebih ditiadakan.
2.2.8. Karakteristik Fisik
Panjang maksimum dan lebar PCB Duemilanove adalah 2,7 dan 2,1 inci masing-masing dengan konektor USB dan jack power. Tiga lubang sekrup memungkinkan board terpasang ke permukaan atau alas dengan kuat. jarak antara pin digital 7 dan 8 adalah 160 mil (0,16 "), bukan kelipatan genap dari jarak mil 100 dari pin lain.
2.3 Teori Motor DC
2.3.1 Prinsip Kerja Motor DC
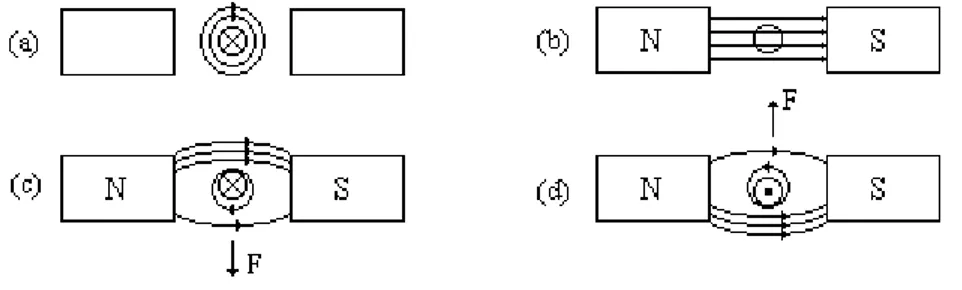
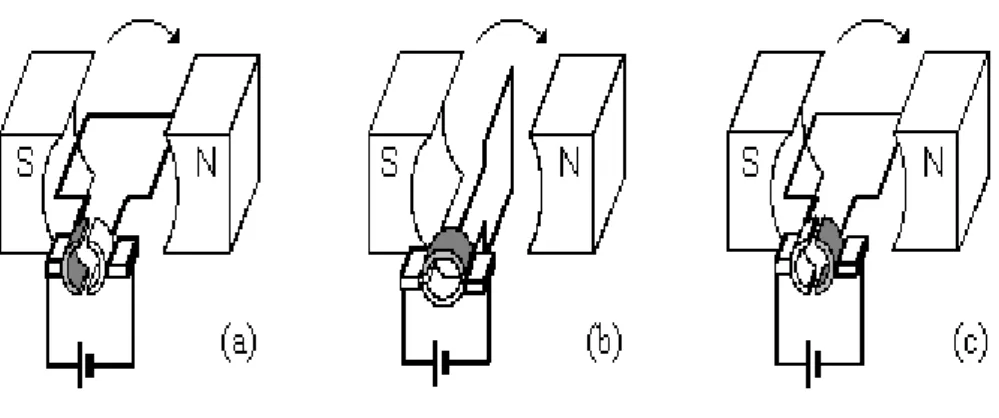
Gaya listrik dapat menimbulkan medan magnet. Konversi energi listrik menjadi energi mekanik secara sederhana dapat dilihat pada gambar berikut ini.
Gambar 2.6 Interaksi garis gaya magnetik dengan arus listrik.
Pada gambar (a) terlihat adanya medan magnet yang timbul searah jarum jam di sekitar penghantar yang dialiri arus listrik ke arah menjauhi pembaca. Pada gambar (b) garis gaya magnet ‘mengalir’ dari arah kutub utara ke kutub selatan. Gambar (c) menunjukkan bila penghantar diberi arus listrik menjauhi pembaca dan berada pada medan magnet permanen dengan arah kiri ke kanan pembaca, maka resultan gaya yang terjadi arahnya ke bawah. Gambar(d) menunjukkan bila penghantar diberi arus listrik menuju pembaca dan berada pada medan magnet permanen dengan arah kiri ke kanan pembaca, maka resultan gaya yang terjadi arahnya ke atas.
Pada dasarnya motor DC merupakan tranduser torsi yang mengubah energi listrik ke energi mekanik. Prinsip kerja motor DC berdasarkan pada penghantar yang membawa arus listrik yang ditempatkan dalam suatu medan magnet akibatnya penghantar tersebut akan mengalami gaya.
Gambar 2.7. Prinsip kerja motor DC
Gaya menimbulkan torsi yang akan menghasilkan rotasi mekanik, sehingga rotor akan berputar. Ringkasnya prinsip kerja dari motor membutuhkan:
• Adanya garis-garis gaya medan magnet (fluks), antara kutub yang berada
distator.
• Penghantar yang dialiri arus listrik ditempatkan pada jangkar yang berada dalam medan magnet tadi.
• Pada penghantar timbul gaya yang menghasilkan torsi.
2.3.2 Kecepatan Motor DC
Secara umum motor DC berlaku persamaan GGL lawan, yang ada hubungannya dengan kecepatan sebagai berikut,
Eb = Km .φ. ω (2.1)
(2.2)
Eb = GGL lawan yang dibangkitkan oleh jangkar (volt)
φ = fluks perkutub (weber)
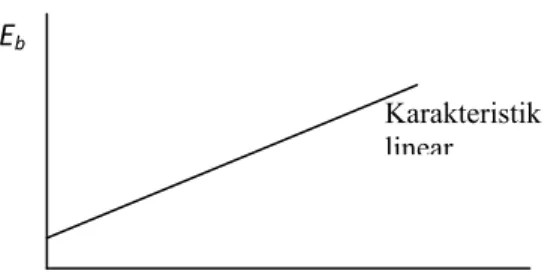
Motor DC magnet permanen mempunyai medan magnet yang konstan (φ)
sehingga kecepatan motor dipengaruhi dan berbanding lurus dengan tegangan belitan jangkar.
Kurva tegangan-kecepatan dari suatu motor DC ada saat beban nol terlihat pada Gambar.
Gambar 2.8 Karakteristik linear motor DC
Motor DC mempunyai dua bagian dasar yaitu :
1. Bagian diam/tetap (stasioner) yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektromagnetik) atau magnet permanen. Bagian stator terdiri dari bodi motor yang memiliki magnet yang melekat padanya. Untuk motor kecil, magnet tersebut adalah magnet permanen sedangkan untuk motor besar menggunakan elektromagnetik. Kumparan yang dililitkan pada lempeng-lempeng magnet disebut kumparan medan.
2. Bagian berputar (rotor). Rotor ini berupa sebuah koil dimana arus listrik mengalir. Suatu kumparan motor akan berfungsi apabila mempunyai :
Karakteristik linear
Eb
• Kumparan medan,berfungsi sebagai pengahsil medan magnet.
• Kumparan jangkar, berfungsi sebagai pengimbas GGL pada konduktor
yang terletak pada laur-alur jangkar.
• Celah udara yang memungkinkan berputarnya jangkar dalam medan
magnet.
2.3.3 Torsi
Torsi adalah putaran dari suatu gaya terhadap suatu poros. Hal ini dapat diukur dengan hasil kali gaya itu dengan jari-jari lingkaran, dimana gaya itu bekerja. Pada suatu pulley dengan jari-jari r meterbekerja suatu gaya F Newton yang menyebabkan pulley berputar dengankecepatan n putaran per detik.
Torsi (T) = F x r Newton meter (N-m) (2.3)
Usaha yang dilakukan oleh gaya tersebut pada suatu putaran adalah : Usaha = gaya x jarak
= F x 2Πr (2.4)
Daya yang dibangkitkan adalah :
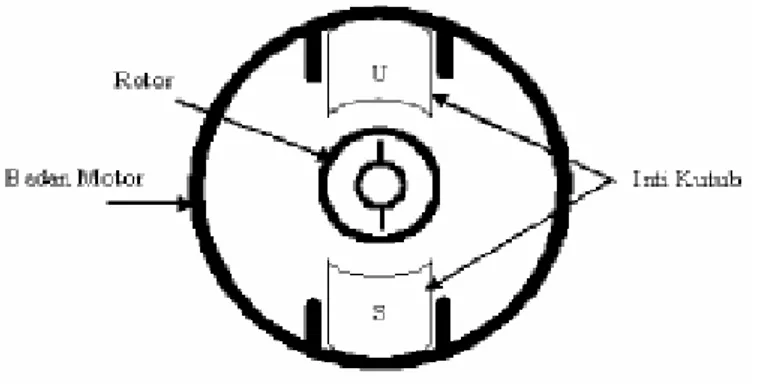
2.3.4 Konstruksi Motor DC
Konstruksi dari sebuah motor DC ditunjukkan seperti pada gambar 2.36 di bawah ini. Pada motor arus searah rotornya mempunyai kumparan tidak hanya satu, terdiri kumparan dan komulator yang banyak untuk mendapatkan torsi yang terus menerus. Rotor terdiri dari jangkar yang intinya terbuat dari lempengan-lempengan yang ditakik.Susunan lempengan-lempengan membentuk celah-celah tersebut dimasuki konduktor kumparan jangkar. Ujung tiap-tiap kumparan dihubungkan pada satu segment komutator. Tiap segmen merupakan pertemuan dua ujung kumparan yang terhubung.
Gambar 2.9 Bagian-Bagian Motor DC
Kumparan penguat dihubungkan seri, jangkar merupakan bagian bergerak yang terbuat dari besi berlaminasi untuk mengurangi rugi-rugi arus Eddy. Kumparan jangkar diletakkan pada slot besi di sebelah luar permukaan jangkar. Pada jangkar terdapat komulator yang berbentuk silinder masing-masing diisolasi. Sisi kumparan dihubungkan dengan segmen komulator pada beberapa bagian yang berbeda, tergantung dari tipe lilitan yang diperlukan.
2.4 LDR (Light Dependent Resistor)
LDR singkatan dari Light Dependent Resistor adalah resistor yang nilai resistansinya berubah-ubah karena adanya intensitas cahaya yang diserap. LDR juga merupakan resistor yang mempunyai koefisien temperature negative, dimana resistansinya dipengaruhi oleh intrensitas cahaya. LDR dibentuk dari cadium Sulfied (CDS) yang mana CDS dihasilkan dari serbuk keramik. Secara umum, CDS disebut juga peralatan photo conductive, selama konduktivitas atau resistansi dari CDS bervariasi terhadap intensitas cahaya. Jika intensitas cahaya yang diterima tinggi maka hambatan akan berkurang yang mengakibatkan tegangan yang keluar (signal output) akan naik begitu juga sebaliknya disinilah mekanisme proses perubahan cahaya menjadi listrik terjadi.
CDS tidak mempunyai sensitivitas yang sama pada tiap panjang gelombang dari ultraviolet sampai dengan infra merah. Hal tersebut dinamakan karakteristik respon spectrum dan diberikan oleh pabrik. CDS banyak digunakan dalam perencanaan rangkaian bolak-balik (AC) dibandingkan dengan photo transistor dan photo dioda.
Gambar 2.11 a. Karakteristik LDR b. Simbol LDR
Gambar 2.12 Skematik LDR
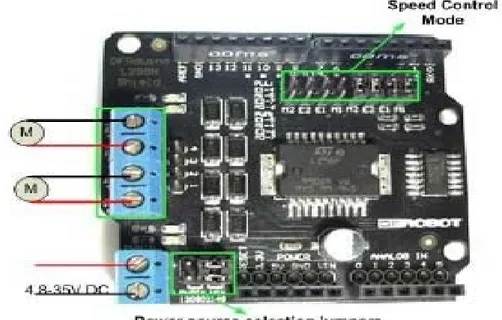
2.5 Arduino Motorshield (L298)
DFRobot L298 driver motor dc menggunakan LG’ high power H-bridge driver Chip L298P yang cocok digunakan untuk mengendalikan Motor DC dengan arus maksimum masing-masing motor 2A. Output motor menggunakan
delapan high-speed Schottky dioda untuk pengamannya. Pengkanelan modul Arduino motorshield ini diatur dengan baik dan di desain menumpuk langsung ke Modul arduino duemilanove atau Arduino mega. Hal itu dimaksudkan untuk mengurangi penggunaan kabel sehingga terlihat lebih ringkas dan rapih
Arduino Motor Shield dapat merubah antara mode pengontrolan kecepatan menggunakan PWM dan mode phase-locked loop (PLL) melalui pengaturan jumperan yang tepat. Power supply dapat diambil melalui input VIN Arduino atau input PWRIN melalui pengaturan jumperan yang tepat. Pengaturan kecepatan dengan menggunakan PWM dapat diperoleh dari output PWM Arduino pin 5 dan pin 6. Fungsi aktif atau tidak aktif pengontrolan motor didapat dari arduino pin 4 dan poin 7.
Motorshield akan mendapat power dari Arduino atau dari sumber power external. Untuk lebih kuat sangat dianjurkan menggunakan sumber power dari luar untuk power Motorshield tersebut. Karakteristik Arduino MotorShield :
• Sumber power langsung dari arduino : 5V
• Sumber power external : 4.8 – 35V
• Penyedia arus logika : ≤36mA
• Arus motor maksimal : 2A
• Penggunaan power maksimum : 25W(T=75Ԩ)
• Mode pengaturan kecepatan dapat menggunakan PWM dan PLL
Gambar 2.13 Arduino Motorshield 2A
Gambar 2.14 IC driver L293 / L298
2.6 Sensor Air
Sensor air adalah komponen elaktronika yang berfungsi untuk signal ada air hujan / tidak. Pada dasarnya prisip kerja alat ini sama dengan saklar. Namun bedanya yang menghubungkan sirkuit pada alat ini bukan push button atau sejenisnya, melainkan air atau konduktor lainnya.
Gambar 2.14 Skematik sensor air
2.7 IDE ( Integrated Development Enviroment )
Ketika kita membuka program Arduino IDE ( Integrated Development Enviroment ), akan terlihat serupa dengan tampilan gambar 2.5 dibawah ini. Jika kita menggunakan Windows atau Linux, akan terlihat perbedaan, tetapi pada dasarnya IDE ( Integrated Development Enviroment ) akan sama tidak perduli Operasi Sistemnya apa yang digunakan.
Gambar 2.15 Tampilan program IDE ( Integrated Development Enviroment )
IDE terpisah dari toolbar, the code ada ditengah dan The Serial Output ada dibawah terdiri dari tujuh tombol diantaranya :
1. Verify / Compile
Digunakan untuk mengecek atau memeriksa apakah kode sudah benar sebelum di kirim kepapan Arduino
2. Stop
Berfungsi untuk memberhentikan Serial Monitor dari pengoperasian.
3. New
Berfungsi untuk membuat tampilan lembar kerja atau sketh baru untuk memasukan kode
4. Open
Menampilkan list lembar kerja atau sketch. 5. Save
Menyimpan lembar kerja kedalam papan Arduino
6. Upload
Mengirim lembar kerja kedalam papan Arduino. 7. Serial Monitor
Menampilkan hasil data – data yang telah dikirim dari Arduino.
Gambar 2.16 Tampilan toolbar program IDE
Untuk memulai serial monitor , tekan tombol Serial Monitor dan untuk menghentikan tekan tombol Stop. Pada Linux, Arduino akan me-reset sendiri ketika meng-klik tombol Serial Monitor. Untuk mengoperasikan atau menggabungkan Arduino pada PC ( Personal Computer ), kita dapat menggunakan program – program seperti Processing, Flash, MaxMSP, Visual Basic, dan lain – lain.
2.7.1 Menu IDE
Kita dapat melihat beberapa menu untuk mengakses diantaranya adalah :
1. Menu Help
Pada menu ini dapat membantu kita menemukan informasi lebih lagi tentang IDE ( Integrated Development Enviroment ).
• Find in reference
• About Arduino
• Visit Arduino
• Frequently Asked Question • Troubleshooting
• Reference 2. Menu Tools
Pada menu ini terdapat peralatan untuk mengisi lembar kerja dari mulai mengedit kode - kode agar terlihat lebih rapih, memilih tipe papan Arduino, memilih serial port dan lain – lain diantaranya :
• Auto Format
• Archive Sketch
• Fix Encoding dan
Reload • Serial Monitor • Burn Bootloader • Serial Port • Board 3. Menu Sketch
Pada menu ini kita dapat menambah file kerja, mengeksekusi program yang kita buat, mengimport Library didalam menu ini antara lain :
• Verify / Compile • Add File
• Stop
• Import Library
• Slow Sketch Folder
4. Menu Edit
Pada menu ini kita dapat melakukan pengeditan pada lembar kerja, menu Edit ini berisi diantaranya :
• Undo addition
• Cut
• Copy
• Copy as HTML • Find nex • Find • Decrease Indent • Comment • Uncomment 5. Menu File
Pada menu ini kita dapat mengakses atau membuat lembar kerja baru menyimpan atau mengirim program ke papan Arduino didalam menu file terdapat : • New • Open • Sketch book • Example • Close • Save • Quit • Preference • Print • Page Setup
• Upload to I/O Board
• Save as
2.7.2 Referensi Bahasa Program IDE
Bahasa program Arduino dapat dibedakan menjadi tiga bagian : Struktur, Values/nilai dan fungsi.
1. Structure setup loop 2. Control Structure if if…else for switch case
while do…while break continue return goto 3. Boolean Operators && ( and ) ││ ( or ) ! (not)
4. Pointer Access Operators * Dereference operator & reference operator 5. Bitwise Operators
& ( bitwise and ) | ( bitwise or ) ^ (bitwise xor) ~ (bitwise not) << (bitshift left) >> (bitshift right) 6. Compound Operators ++ (increment) --_- (decrement) += (compound addition) -=(compound subtraction) *=(compound multiplication) /= (compound division) &= (compound bitwise and) |= (compound bitwise or) 7. Constants
high | low input | output true | false
integer constants floating point constants
8. Data Types void boolean char unsigned char byte int unsigned int float double
string – char array string – object array 9. Conversion char byte int word long float 10. Digital I/O pinMode digitalWrite digitalRead 11. Analog I/O analogReference analogRead analogWrite – PWM 12. Time millis micros delay delayMicrosecond 13. Communication serial