PENDAHULUAN
Rumusan Masalah
Tujuan Penelitian
Batasan Masalah
Manfaat Penelitian
Sistematika Penulisan
DASAR TEORI
Gaya
Torsi
Berdasarkan aturan tangan kiri Fleming, rumus di atas dapat dikembangkan lebih lanjut untuk menghitung torsi motor dengan jumlah belitan jangkar sebagai berikut. Menurut Zumain (dalam Kuswardana, 2016) dari persamaan diatas terlihat bahwa semakin besar nilai gaya atau jari-jari maka semakin besar pula torsinya.
Kecepatan
Kecepatan Pada Objek Berputar
Percepatan
Motor Listrik
- Konsep Dasar Motor Listrik
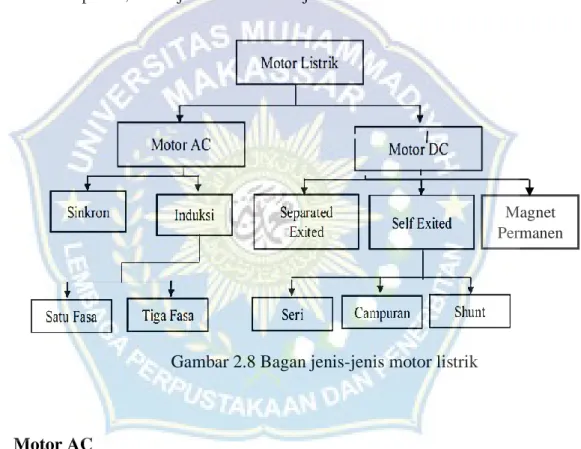
- Jenis-Jenis Motor Listrik
- Motor DC
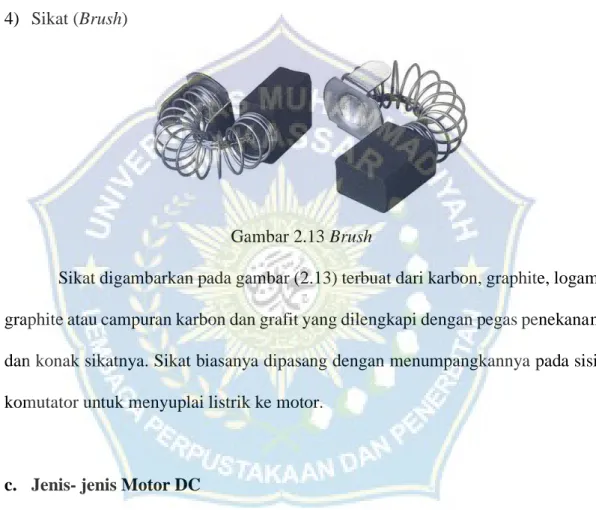
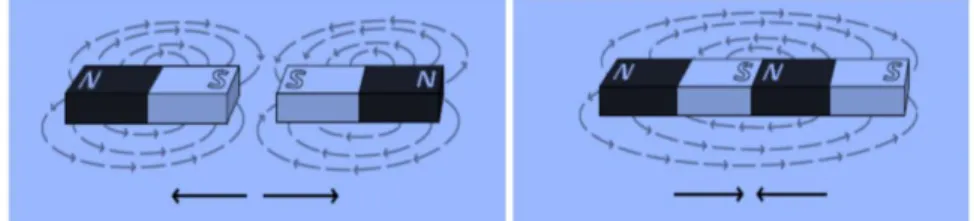
Percobaan yang dilakukan oleh Faraday adalah seutas kawat yang digantung bebas dicelupkan ke dalam wadah air raksa, kemudian magnet permanen juga ditempatkan pada wadah air raksa tersebut. Menurut Saleh dan Bahariawan (2018), terdapat berbagai jenis dan tipe motor listrik yang tersedia saat ini. Stator adalah bagian motor listrik yang diam dan rotor adalah bagian motor yang bergerak (berputar).
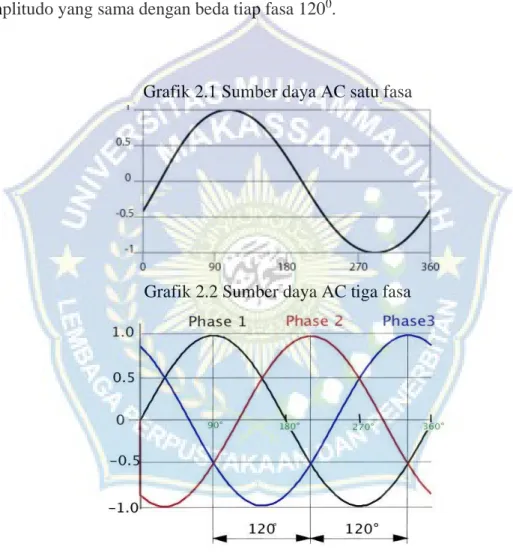
Menurut Saleh dan Bahariawan (2018), motor listrik arus bolak-balik adalah jenis motor listrik yang bekerja dengan sumber tegangan arus bolak-balik (AC, Alternating Current). Pasokan listrik arus bolak-balik (AC) ditujukan untuk menyuplai kebutuhan listrik pada berbagai industri komersial atau pelanggan tetap. Kebanyakan instalasi komersial ringan hanya menggunakan sumber listrik satu fasa yang disalurkan melalui dua kabel konduktor dan satu kabel ground dengan bentuk gelombang daya seperti pada gambar di bawah ini.
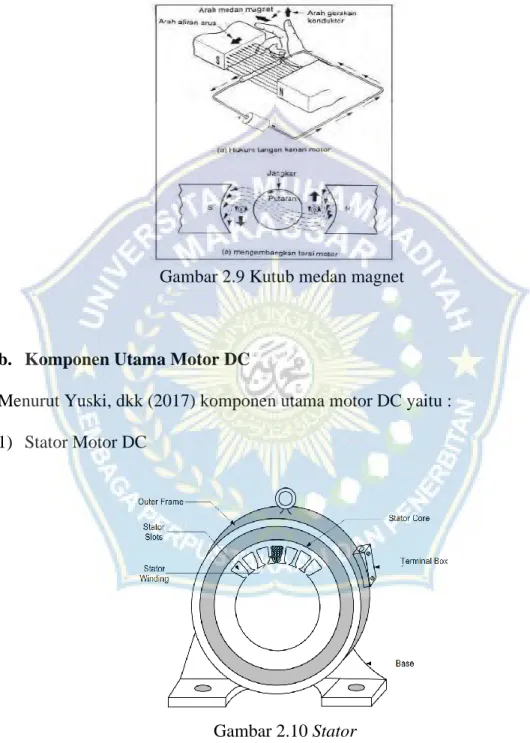
Menurut Saleh dan Bahariawan (2018), motor arus searah atau sering disebut motor arus searah sesuai dengan namanya, menggunakan arus searah searah yang lebih sering digunakan untuk pengatur kecepatan dibandingkan dengan motor arus bolak-balik. Bentuk motor yang paling sederhana mempunyai kumparan tunggal yang dapat berputar bebas di antara kutub-kutub magnet permanen. Menurut Aditya, dkk (2019), motor DC memiliki jangkar dengan satu atau lebih kumparan terpisah.
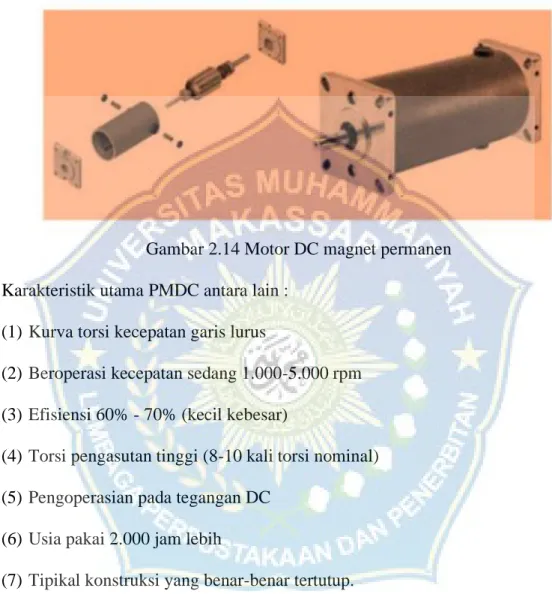
Dalam perkembangannya banyak cara untuk melakukan penyetelan motor DC, diantaranya adalah penyetelan motor DC dengan menggunakan mesin, kegunaan unit tersebut untuk memudahkan operator dalam menggunakan motor DC agar dapat bekerja sesuai keinginan. Menurut pendapat Zumain (2009) mengatakan bahwa berdasarkan prinsip kemagnetan, motor DC menggunakan prinsip kemagnetan di atas. Kuas pada gambar (2.13) terbuat dari karbon, grafit, logam grafit atau campuran karbon dan grafit, yang dilengkapi dengan pegas kompresi dan kontak sikat.
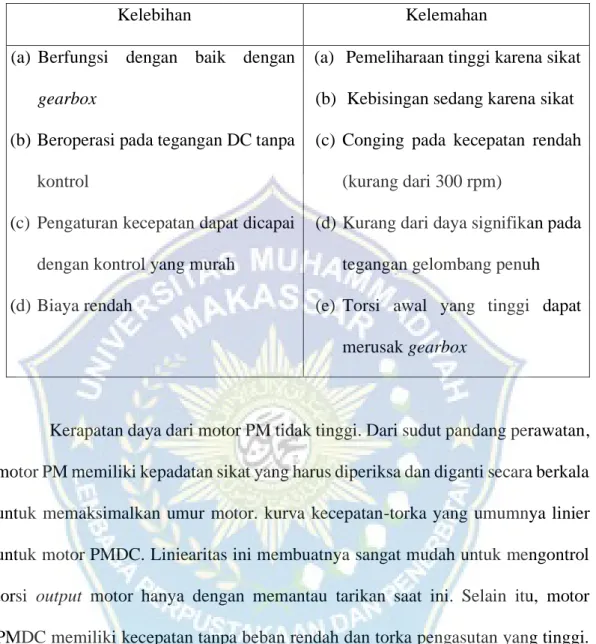
Menurut Yudha (2020), motor DC memerlukan suplai tegangan searah dengan kumparan medan untuk diubah menjadi energi mekanik. Disebut motor DC magnet permanen karena terdapat dua magnet permanen pada stator atau bagian motor yang tidak berputar, dan terdapat belitan yang dihubungkan ke komutator mekanis melalui sikat karbon pada rotor atau bagian motor yang berputar.
Baterai
- Konstruksi Baterai
- Cara Kerja Accu
- Kapasitas Baterai
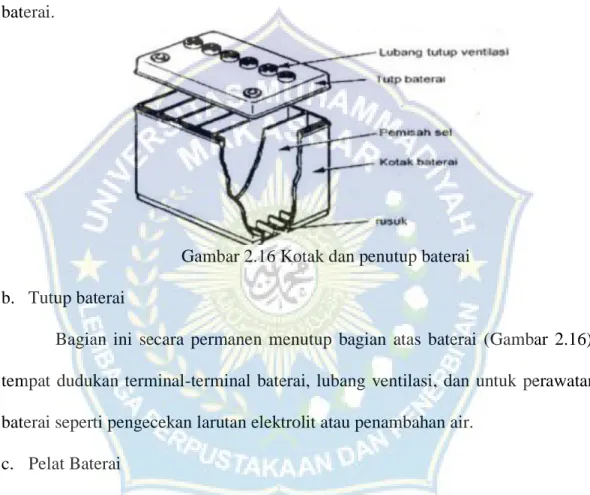
Bahan pembuat kotak baterai biasanya transparan, sehingga memudahkan untuk memeriksa kadar larutan elektrolit pada baterai. Bagian ini secara permanen menutupi bagian atas baterai (Gambar 2.16), terminal baterai, lubang ventilasi dan untuk perawatan baterai seperti memeriksa larutan elektrolit atau menambahkan air. Pelat positif terbuat dari bahan antimon yang dilapisi lapisan aktif timbal oksida (timbal dioksida, PbO2) berwarna coklat, dan pelat negatif terbuat dari timbal sepon (Pb) berwarna abu-abu.
Pemisah disisipkan di antara pelat positif dan negatif untuk mencegah terjadinya hubungan pendek antara kedua pelat. Permukaan separator yang berpori menghadap pelat positif untuk melindungi karat terhadap pelat positif agar tidak berhamburan. Satu kesatuan pelat positif dan negatif dibatasi oleh pembagian antara dua pelat positif dan negatif, yang disebut sel atau unsur.
Sel-sel baterai dihubungkan secara seri, sehingga jumlah sel baterai menentukan besarnya tegangan baterai yang dihasilkan. Untuk setiap sel terdapat dua pelat sambungan (lihat gambar sel baterai), yaitu pelat positif dan pelat negatif. Kutub pada aki terdapat dua, yaitu kutub positif dan kutub negatif pada bagian atas aki.
Ketika baterai habis, hampir semua asam menempel pada pelat elektroda baterai, sehingga konsentrasi elektrolit sangat rendah, hampir terdiri dari air (H2O), sehingga massa jenis cairan turun menjadi sekitar 1,1 kg/dm3 , ini mendekati berat jenis air, yaitu 1 kg/dm3. Melalui perubahan berat jenis ini, Anda dapat mengetahui apakah kapasitas baterai masih terisi penuh atau hidrometernya rendah. Arus pengambilan baterai mengacu pada baterai yang disetrum/diisi, yaitu baterai diisi dengan arus searah, elektroda positif baterai dihubungkan dengan arus pengisian positif, dan elektroda negatif dihubungkan dengan arus pengisian negatif.
Hal ini dapat ditemukan di toko aki yang terdapat beberapa aki yang dihubungkan secara seri dan semuanya disetrum secara bersamaan. Besarnya Ah yang akan disuplai pada saat proses pengisian sudah pasti lebih besar dibandingkan dengan Ah yang disuplai oleh baterai. Sebaliknya jika arus pengosongannya besar maka energi yang tersimpan di baterai akan cepat habis.
Device Kontrol Motor
- Relai
- Jenis Relai Berdasarkan Cara Kerja
- Jenis Relai Berdasarkan Jumlah Pole dan Throw
- Kontaktor
Relai paling sederhana adalah relai elektromekanis, yang memberikan gerakan mekanis saat menerima listrik. Ada juga relay yang melindungi motor atau komponen lainnya dari tegangan lebih atau korsleting. Jenis relai yang dapat menangani daya besar yang diperlukan untuk mengendalikan motor listrik atau beban lain secara langsung disebut kontaktor.
Relay biasanya digunakan untuk mengendalikan arus/tegangan yang besar (misalnya peralatan listrik 4 amp AC 220V) dengan menggunakan arus/tegangan yang kecil (misalnya 0,1 amps 12V DC). Ketika relai menerima sumber tegangan melalui elektromagnet, ia mengubah tiga posisi pada sakelar atau kontaktor. Perubahan Posisi (CO) yaitu keadaan jangkar saklar relai yang berubah dari NC ke NO atau sebaliknya dari NO ke NC.
Di antara aplikasi relai yang dapat ditemukan adalah: Relai untuk pengendalian ON/OFF beban dengan sumber tegangan berbeda. Relai ini mempunyai empat terminal yaitu dua terminal kumparan dan dua terminal saklar (A dan B) yang dapat diputus dan dihubungkan. Relai ini mempunyai lima terminal yaitu dua terminal kumparan dan tiga terminal saklar (A, B dan C) yang dapat dihubungkan dan diputuskan dengan satu terminal pusat.
Relai ini mempunyai enam terminal yaitu dua terminal kumparan dan empat terminal yaitu dua pasang saklar yang dapat dihubungkan dan diputuskan (A1 dan B1 serta A2 dan B2). Relay ini mempunyai delapan terminal yaitu dua terminal kumparan, keenam terminal tersebut merupakan dua rangkaian saklar yang dapat diputus dan dihubungkan (A1, B1, C1 dan A2, B2, C2). Dari konstruksi relai elektromekanis pada gambar 2.27 dapat digambarkan sistem kerja atau proses kerja relai.
Pada saat elektromagnet menerima sumber tegangan maka terdapat medan magnet yang menarik jangkar, sehingga saklar relay dihubungkan dengan terminal NO (Normally Open) seperti terlihat pada Gambar 2.28. Kontak bantu NO (biasanya terbuka) akan menutup dan kontak bantu NC (biasanya tertutup) akan terbuka. Jika kumparan utama diberi energi, maka akan tercipta medan magnet pada inti besi, yang akan menarik inti besi kumparan hubung singkat yang terhubung ke kontak utama dan kontak bantu kontaktor.

Potensiometer
Dengan kata lain, resistansi antara terminal luar untuk potensiometer 10 Kohm, akan selalu menjadi 10 Kohm, tidak peduli bagaimana kita memutar elemen kontrol. Hambatan antara lengan pemindah dan salah satu terminal luar dapat divariasikan dari nilai minimum nol ohm hingga nilai maksimum yang sama dengan nilai penuh potensiometer. Besarnya hambatan antara shift arm dan masing-masing terminal luar harus sama dengan hambatan penuh potensiometer.
Apabila rintangan antara lengan gelongsor dan salah satu kenalan luaran meningkat, rintangan antara lengan gelongsor dan salah satu kenalan luaran yang lain berkurangan.
METODE PENELITIAN
- Peralatan dan Bahan
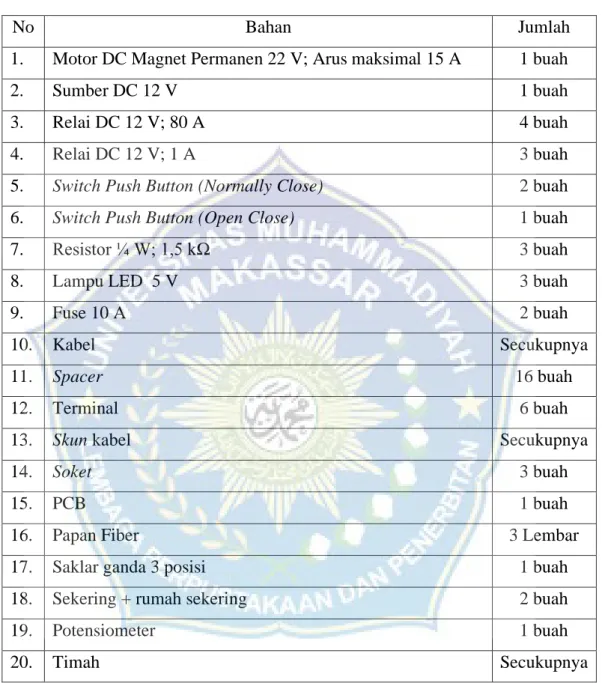
- Pelaratan
- Bahan
- Diagram Blok Sistem
- Langkah Penelitian
- Jadwal Penelitian
Untuk melakukan pengukuran pada alat mekanik diperlukan alat ukur yang disesuaikan dengan parameter (besaran) yang diukur. Untuk melakukan pengukuran pada sistem ini diperlukan alat ukur yang disesuaikan dengan parameter (kuantitas) yang diukur. Hasil pengukuran tegangan keluaran baterai adalah putaran ke depan. Berikut adalah grafik rata-rata pengukuran tegangan keluaran baterai.
Nilai R1 menghasilkan rata-rata pengukuran tegangan keluaran baterai lebih tinggi dibandingkan nilai resistansi lainnya yaitu 11,96 V. Hasil pengukuran tegangan keluaran baterai dengan putaran terbalik Berikut ini adalah rata-rata pengukuran tegangan keluaran baterai. Nilai R1 menghasilkan rata-rata pengukuran tegangan keluaran baterai lebih tinggi dibandingkan percepatan lainnya yaitu 11,96V.
Pengukuran tegangan sistem kendali arah dilakukan untuk mengetahui besarnya tegangan yang masuk pada input relai pada arah maju, netral, dan. Pengukuran tegangan motor dilakukan untuk mengetahui besarnya tegangan yang masuk ke input motor pada kondisi maju dan mundur, yang dilakukan sebanyak tiga kali dengan hasil yang dirata-ratakan. Hasil pengukuran tegangan masukan motor putaran maju Berikut rata-rata pengukuran tegangan masukan motor.
Secara keseluruhan, rata-rata hasil pengukuran tegangan input motor meningkat seiring dengan nilai resistansinya. Nilai R1 menghasilkan rata-rata pengukuran tegangan masukan motor lebih rendah dibandingkan yang lain yaitu 0,47 V. Hasil Pengukuran Tegangan Masukan Motor Putaran Terbalik Berikut ini adalah rata-rata pengukuran tegangan masukan motor.
Nilai R1 menghasilkan rata-rata pembacaan tegangan masukan motor lebih rendah dibandingkan dengan yang lain yaitu sebesar 0,42 V. Tegangan masukan ke motor pada posisi maju dan mundur mempengaruhi nilai resistansi potensiometer pada sistem pengatur kecepatan.
HASIL DAN PEMBAHASAN
Wiring Diagram
Dengan menekan tombol hijau ke depan (tekan dari bawah), maka daya akan tersambung ke sistem lock relay yaitu relay C yang ditandai dengan lampu LED biru dan lampu pilot, kemudian dihubungkan ke sistem kendali kemudi. yaitu relay A1 dan A2 (memberi energi) agar motor berputar maju. Dengan menekan tombol tekan bawah berwarna hijau, arus akan dihubungkan ke sistem lock relay yaitu relay D yang ditandai dengan berkedipnya lampu LED dan lampu pilot berwarna merah, kemudian dihubungkan dengan sistem kendali kemudi, yaitu relay B1 dan B2. (memberi energi) sehingga motor mundur.
Pengukuran Alat
- Pengukuran Pada Output Baterai
- Pengukurana Tegangan Sistem Pengendali Arah
- Pengukuran Pada Input Motor
- Pengukuran Kecepatan Pada Putaran Motor
Dari hasil pengukuran rancangan sistem ED yang dibuat maka diperoleh kinerja sistem ED yaitu. Sumber tegangan keluaran pada posisi maju dan mundur mempengaruhi nilai resistansi potensiometer. Semakin besar nilai resistansi potensiometer maka tegangan keluaran sumber tegangan akan turun kurang lebih 0,001 V.

PENUTUP
Saran
Kami menyadari bahwa sistem kendali arah putaran yang kami buat belum sempurna, oleh karena itu pengembangan dan penelitian dapat terus dilanjutkan untuk menciptakan sistem yang lebih baik, lebih kompleks dan mempunyai kemampuan lebih.