isprs annals III 1 209 2016
Teks penuh
Gambar
Garis besar
Dokumen terkait
Speckle noise present in radar imagery caused by interaction of out –of-phase waves with a target, the objective of this paper is attempt to test
This in turn is depending on the quality of the image matching ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume III-5, 2016.. XXIII
In Figure 5a systematic errors in the surface model derived from dense image matching became apparent, under the assumption that the TLS data serves as reference.. That these
This paper exploits the potential of dense multi-image 3d reconstruction of destroyed cultural heritage monuments by either using public domain touristic imagery only or
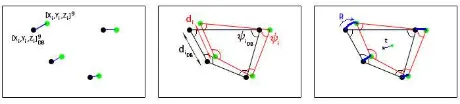
A local maximum detection algorithm with different footprint sizes and threshold values is applied to produce multiple object detection results for each of the feature maps.. For
With the rapid development of high resolution remote sensing for earth observation technology, satellite imagery is widely used in the fields of resource investigation,
Textureless and geometric discontinuities are major problems in state-of-the-art dense image matching methods, as they can cause visually significant noise and the loss
In this section the rectification of the image triplets, dense matching with SG optimisation, subsequent sub-pixel interpolation and the calculation of 3D point clouds will be
