isprsannals II 3 W2 43 2013
Teks penuh
Gambar
Garis besar
Dokumen terkait
(2004) and/or metadata can be used to aid the reconstruction process in architectural photogrammetry when the classical methods fail.. The primary initial values for the bundle
The resulting components should not be interpreted as changes but as areas of potential changes that will be analysed in further steps using homological persistence (Section 2.2)
KEY WORDS: Traffic sign detection, Sliding window, Object Detection, Frequency
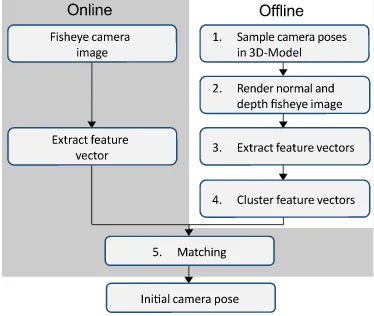
As shown in Figure 1, the framework consists of two stages: (1) determining preliminary position and attitude using built-in sensory data such as velocity and angular rates, and
In this paper two different ways to refine the selection of façade planes are considered: (i) the point cloud is co-registered to an existing city model, which is used
To compare, the separa- ble and non-separable stochastic spatio-temporal model are on average within 14.2% and 13% of the one-year time forward true values at the predicted eight
This proposed framework is composed of two parts: data management and data processing as shown in Figure 1. In the data processing part, the input RS images
The MOD11A1 product comprises the following Science Data Set (SDS) layers for day time and night time observations: LSTs, quality control assessments, observation
