DAFTAR PUSTAKA
[1] Zuhal, “Dasar Teknik Tenaga Listrik dan Elektronika Daya”, Penerbit ITB,
Bandung, 1988
[2] NEMA Standard Publications No. MGI-1993. Motors and Generators, Published by National Electrical Manufactures Ascociation. Washington (1993), Part 21 PP. 9-10 and Part 30 PP. 1-2
[3] Pane, Zulkarnain,”Diktat Kuliah Instalasi Listrik”, Medan 2007.
[4] Theraja, B.L. & Theraja, A.K., “A Text Book of Electrical Technology”, New
Delhi, S.Chand and Company Ltd., 2001.
[5] Chapman Stephen J, “Electric Machinery Fundamentals”,Third Edition Mc Graw Hill Companies, New York, 1999.
BAB III
METODE PENELITIAN
4.1Tempat dan Waktu
Penelitian ini akan dilakukan dilaboratorium konversi energi listrik Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara. Penelitian akan dilaksanakan setelah proposal diseminarkan dan disetujui. Lama penelitian direcanakan selama 2 (dua) bulan.
4.2Bahan & Peralatan
Bahan yang digunakan untuk melakukan penelitian ini adalah : 1. Motor induksi tiga phasa
Tipe : rotor belitan Spesifikasi :
- AEG Typ C AM 112MU 4RI - Δ / Υ 220/ 380 V ; 10,7/ 6,2 A - 2,2 Kw, cos ϕ 0,67
- Kelas Isolasi : B 2. Mesin DC
3. Amperemeter 4. Voltmeter 5. Tahanan Geser
6. Power Suplai ( AC dan DC ) 7. Tachometer
4.3 Variabel yang diamati
Variabel yang diamati dalam penelitian ini adalah: - Persentasi jatuh tegangan yang mencatu motor - Lamanya waktu operasi motor
- Perubahan nilai resistansi motor yang diukur dengan percobaan DC test pada saat perubahan persentasi jatuh tegangan yang dipikul motor
- Perubahan yang terukur oleh thermometer infrared untuk setiap perubahan persentasi jatuh tegangan yang dipikul motor
4.4 Prosedur Penelitian
Adapun prosedur pengambilan data dalam penelitian ini adalah sebagai berikut:
1. Merangkai rangkaian percobaan
Sebelum melakukan percobaan terlebih dahulu merangkai rangkaian percobaan sesuai dengan percobaan yang dilakukan. Adapun rangkaian percobaan yang akan digunakan seperti gambar yang berikut:
M
A
V
T
A
B
C S2
S1
R
S
T
Gambar 3.1 Rangakaian percobaan pengereman motor induksi tiga phasa dengan
rangkaian kontrol
1.2 Rangkaian percobaan pengukuran suhu motor induksi tiga phasa dengan mengukur tahanan resistansi
Gambar 3.3 Rangakaian kontrol kendali motor induksi tiga phasa
2. Pengambilan data
Prosedur percobaan yang dilakukan yaitu sebagai berikut: - Pengukuran suhu menggunakan thermometer infrared
1. Motor induksi tiga phasa dikopel dengan generator DC, kemudian rangkaian pengukuran disusun seperti gambar 3.1
2. Seluruh switch dalam keadaan terbuka dan pengatur tegangan dalam posisi minimum.
3. Switch S1 (MCCB) ditutup, kemudian PT AC dinaikkan sampai tegangan nominal (untuk kondisi normal) dan jatuh tegangan (untuk kondisi tidak normal).
5. Catat nilai I, nr pada motor induksi kemudian jalankan motor induksi selama 30 menit. Setiap kenaikan 5 menit dilakukan pengereman dan dilakukan pencatatan suhu dengan thermometer infrared.
6. Pengereman dilakukan dengan menekan tombol reverse dan ketika putaran medekati nol tekan tombol stop.
7. Percobaan selesai
- Pengukuran suhu menggunakan metode pengukuran resistansi
1. Motor induksi tiga phasa dikopel dengan motor DC, kemudian rangkaian pengukuran disusun seperti gambar 3.3.
2. Seluruh switch dalam keadaan terbuka dan pengatur tegangan dalam posisi minimum.
3. Kemudian tutup S3, masukkan arus DC pada stator 6,24 A untuk In hubungan Y.
5. Setelah itu catat nilai tegangan yang di dapat ketika nilai arus 6,24A.
6. Percobaan tes DC dilakukan setelah pengereman dalam waktu selang 5 menit selama 30 menit percobaan mesin beroperasi.
7. Lakukan perhitungan untuk mencari nilai Rdc untuk hubungan Y. 8. Setelah di dapat nilai R maka masukkan kedalam persamaan 2.29. 9. Percobaan selesai.
- Temperatur yang tercatat pada thermometer infrared saat pengereman dalam kondisi tegangan nominal maupun jatuh tegangan.
- Resistansi motor setiap kenaikan waktu tertentu baik dalam keadaan normal maupun jatuh tegangan.
3.5Pelaksanaan Penelitian
3.5.1 Proses Pengumpulan Data
Adapun diagram alur dari proses pengambilan data terlihat pada gambar 3.5
Gambar 3.4 Diagram alur proses pengambilan data
MULAI
MEMPERSIAPKAN PERALATAN PERCOBAAN
MERAINGKAI RANGKAIAN PERCOBAAN
MELAKUKAN PERCOBAAN
PENGAMBILAN DATA
APAKAH SESUAI PERCOBAAN DENGAN PERHITUNGAN
MENAMPAMPILKAN HASIL PENGUKURAN
DAN PERHITUNGAN
BERHENTI YA
3.5.2 Melakukan analisa data terhadap data yang telah diperoleh
BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
4.1 Umum
Motor induksi adalah merupakan motor arus bolak balik yang paling sering digunakan dalam dunia industri maupun rumah tangga. Hal ini dikarenakan motor induksi sangat mudah dalam pengoperasiannya maupun dalam penghentiannya.
Didalam penghentian motor induksi ada beberapa cara, salah satunya dengan pengereman menggunakan metode plugging. Permasalahan jatuh tegangan yang disuplai motor induksi tiga phasa merupakan salah satu masalah dalam penghentian/ pengereman motor induksi tiga phasa. Jatuh tegangan dapat disebabkan karena berbagai macam gangguan tahanan penghantar maupun pada sistem tenaga sehingga tegangan di sisi penerima lebih kecil (Vr) dari sisi pengirim (Vs).
Dalam bab ini akan dibahas pengaruh jatuh tegangan terhadap temperatur motor induksi tiga phasa saat pengereman. Adapun metode pengukuran temperatur motor induksi tiga phasa tersebut menggunakan thermometer infrared dan menggunakan metode pengukuran resistansi.
4.2 Data Percobaan
4.2.1 Pengereman Motor induksi tiga phasa dengan suplai tegangan nominal
Dari percobaan yang dilakukan di Laboratorium Konversi Energi Listrik FT USU untuk pengereman motor induksi 3 phasa dengan suplai tegangan nominal (normal) dengan pengukuran suhu menggunakan thermometer infrared dan metode pengukuran resistansi didapatkan data sebagai berikut :
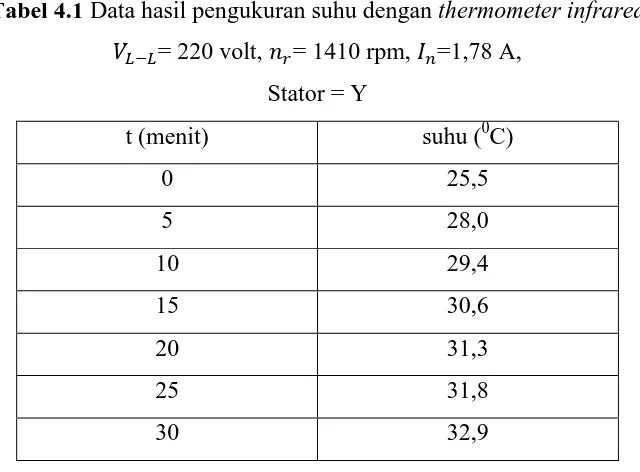
Tabel 4.1 Data hasil pengukuran suhu dengan thermometer infrared
= 220 volt, = 1410 rpm, =1,78 A,
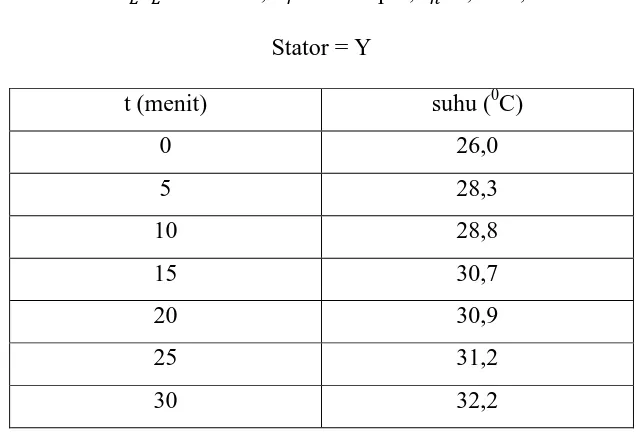
Tabel 4.2 Data hasil percobaan DC test pada motor induksi tiga phasa
t (menit) Vdc (volt) Idc (amp)
4.2.1 Pengereman Motor induksi tiga phasa saat Jatuh Tegangan
pengukuran suhu menggunakan thermometer infrared dan metode pengukuran resistansi didapatkan data sebagai berikut :
Tabel 4.3 Data hasil pengukuran suhu saat pengereman dengan jatuh tegangan
4% menggunakan thermometer infrared
Tabel 4.4 Data hasil pengukuran suhu saat pengereman dengan jatuh tegangan
Tabel 4.5 Data hasil pengukuran DC test dengan jatuh tegangan 4%
t (menit) Vdc (volt) Idc (amp)
0 18,60 6,24
5 18,88 6,24
10 18,97 6,24
15 19,06 6,24
20 19,12 6,24
25 18,20 6,24
30 19,29 6,24
Tabel 4.6 Data hasil pengukuran DC test dengan jatuh tegangan 9%
t (menit) Vdc (volt) Idc (amp)
0 18,61 6,24
5 18,98 6,24
10 19,03 6,24
15 19,18 6,24
20 19,25 6,24
25 19,31 6,24
30 19,42 6,24
4.3 Analisa Data
4.3.1 Motor induksi tiga phasa saat pengereman dengan tegangan nominal
(normal)
Dari table 4.1 dapat diketahui bahwa kenaikan rata-rata temperature motor induksi tiga phasa saat pengereman dengan tegangan nominal (normal) dengan pengukuran menggunakan thermometer infrared sebagai berikut :
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature motor induksi tiga phasa saat pengereman dengan tegangan nominal (normal) pengukuran suhu menggunakan thermometer infrared yaitu setiap kenaikan waktu satu menit terjadi kenaikan suhu sebesar 0.23 0C/m.
Sedangkan dari table 4.2 dapat ditentukan besar resistansi tahanan stator motor induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
Dari hasil perhitungan resistansi diatas dapat ditentukan temperature motor induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
Dari perhitungan diatas dapat dibuat table sebagai berikut :
Table 4.7 Data hasil perhitungan suhu motor induksi tiga phasa saat pengereman
dengan tegangan normal menggunakan metode pengukuran resistansi
= 220 volt, = 1410 rpm, =1,78 A,
Dari table 4.3 dapat diketahui bahwa kenaikan rata-rata temperature motor induksi tiga phasa saat pengereman dengan suplai tegangan normal dengan pengukuran menggunakan metode pengukuran resistansi sebagai berikut :
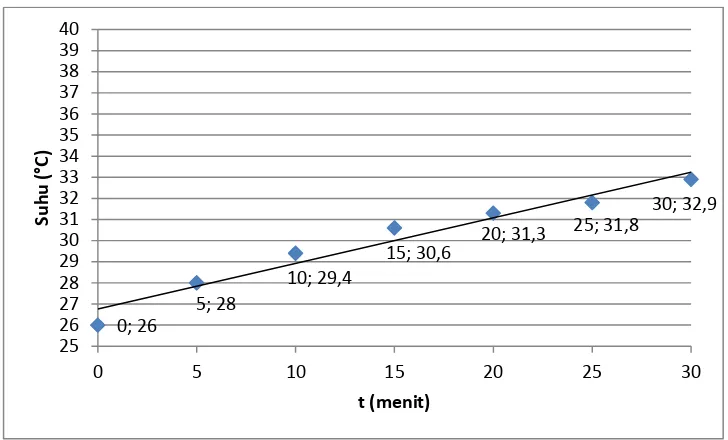
Adapun grafik dari analisa data diatas dapat dibuat sebagai berikut :
Gambar 4.1 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
suplai tegangan nominal (normal) pengukuran suhu menggunakan thermometer infrared
Gambar 4.2 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
4.3.2 Motor induksi tiga phasa saat pengereman dengan jatuh tegangan
Persentasi jatuh tegangan berdasarkan defenisi NEMA standart MGI. 1993 dan IEEE yaitu : temperature motor induksi tiga phasa saat pengereman dengan jatuh tegangan 4% dan 9% dengan pengukuran menggunakan thermometer infrared sebagai berikut :
- Jatuh tegangan 9%
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature motor induksi tiga phasa saat pengereman dengan jatuh tegangan 4% dan 9% pengukuran suhu menggunakan thermometer infrared yaitu setiap kenaikan waktu satu menit terjadi kenaikan suhu sebesar 0,207 dan 0,253 0C/m.
Dari hasil perhitungan resistansi diatas dapat ditentukan temperature motor induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
Dari table 4.6 dapat ditentukan besar resistansi tahanan stator motor induksi tiga phasa saat pengereman dengan jatuh tegangan 9% sebagai berikut :
Dari hasil perhitungan resistansi diatas dapat ditentukan temperature motor induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
Dari perhitungan diatas dapat dibuat table sebagai berikut :
Table 4.8 Data hasil perhitungan suhu motor induksi tiga phasa saat pengereman
dengan jatuh tegangan 4% menggunakan metode pengukuran resistansi
t (menit) Vdc (volt) Idc (amp) Rdc (ohm) suhu (0C)
0 18,60 6,24 1,4904 26
5 18,88 6,24 1,5128 29,919
10 18,97 6,24 1,5200 31,179
15 19,06 6,24 1,5272 32,440
20 19,12 6,24 1,5321 33,280
25 19,20 6,24 1,5385 34,4
30 19,29 6,24 1,5457 35,661
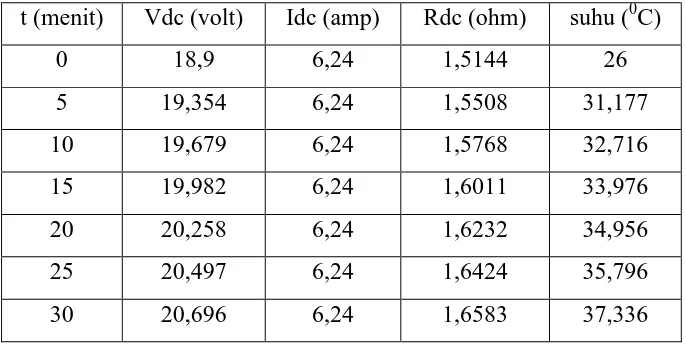
Table 4.9 Data hasil perhitungan suhu motor induksi tiga phasa saat pengereman
dengan jatuh tegangan 9% menggunakan metode pengukuran resistansi
t (menit) Vdc (volt) Idc (amp) Rdc (ohm) suhu (0C)
0 18,9 6,24 1,5144 26
5 19,354 6,24 1,5508 31,177
10 19,679 6,24 1,5768 32,716
15 19,982 6,24 1,6011 33,976
20 20,258 6,24 1,6232 34,956
25 20,497 6,24 1,6424 35,796
30 20,696 6,24 1,6583 37,336
- Jatuh tegangan 4%
0
C/m
- Jatuh tegangan 9%
0
C/m
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature motor induksi tiga phasa saat pengereman dengan jatuh tegangan 4% dan 9% pengukuran suhu menggunakan metode pengukuran resistansi yaitu setiap kenaikan waktu satu menit terjadi kenaikan suhu sebesar 0,322 dan 0,378 0C/m.
Gambar 4.3 Grafik Suhu vs menit untuk motor induksi suplai tegangan saat
pengereman denga jatuh tegangan 4% pengukuran suhu menggunakan thermometer infrared
Gambar 4.4 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
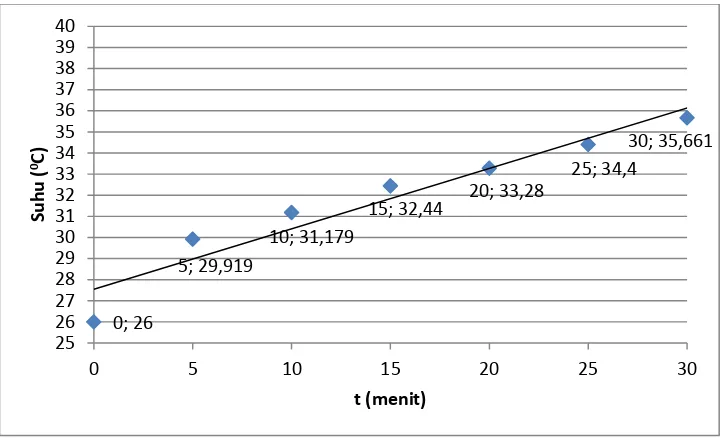
Gambar 4.5 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
jatuh tegangan 4% pengukuran suhu menggunakan metode pengukuran resistansi
Gambar 4.6 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
4.3.3 Perbandingan hasil pengukuran suhu motor induksi tiga phasa saat
pengereman dengan tegangan normal dan jatuh tegangan
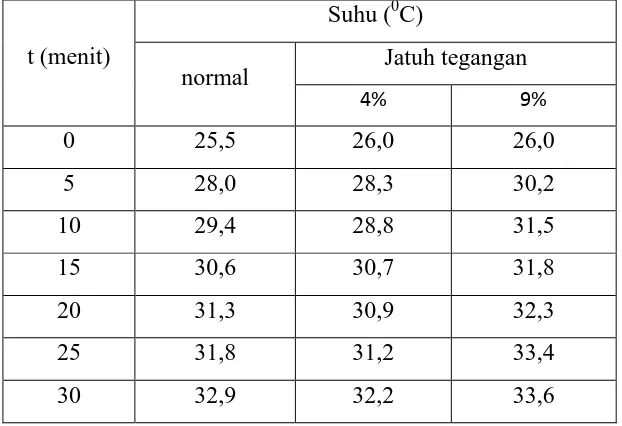
Dari table data 4.1, 4.3 , dan 4.4 dapat diketahui perbandingan suhu motor induksi tiga saat pengereman dengan tegangan normal dan dengan jatuh tegangan 4% dan 9% pengukuran suhu menggunakan thermometer infrared yaitu sebagai berikut :
Table 4.10 Perbandingan kenaikan suhu saat pengereman tegangan normal dan
jatuh tegangan 4% dan 9% menggunakan thermometer infared
t (menit)
Suhu (0C)
normal Jatuh tegangan
4% 9%
0 25,5 26,0 26,0
5 28,0 28,3 30,2
10 29,4 28,8 31,5
15 30,6 30,7 31,8
20 31,3 30,9 32,3
25 31,8 31,2 33,4
30 32,9 32,2 33,6
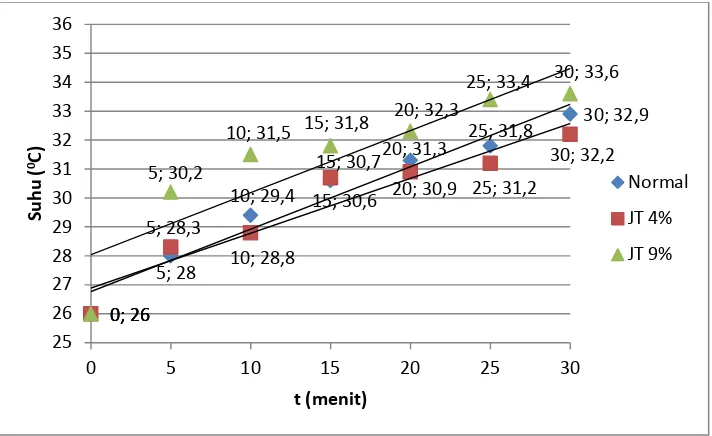
Gambar 4.7 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
tegangan normal dan jatuh tegangan 4% dan 9% pengukuran suhu menggunakan thermometer infrared
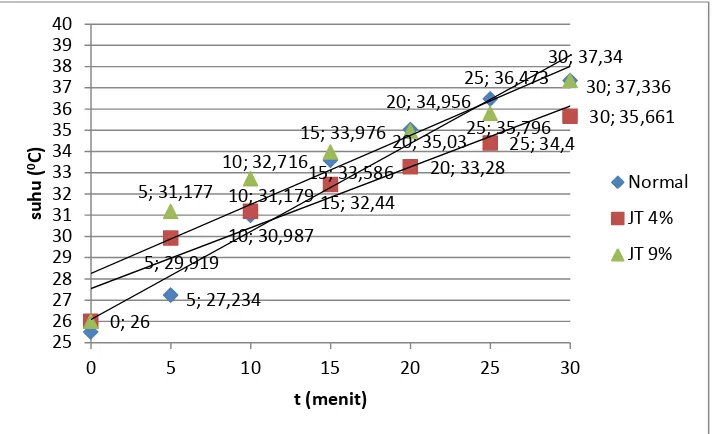
Sedangkan dari table 4.7, 4.8, dan 4.9 dapat diketahui perbandingan suhu motor induksi tiga saat pengereman dengan tegangan normal dan jatuh tegangan 4% dan 9% pengukuran suhu menggunakan metode pengukuran resistansi yaitu sebagai berikut :
Table 4.11 Perbandingan kenaikan suhu saat pengereman dengan tegangan
20 35,030 33,280 34,956
25 36,473 34,4 35,796
30 37,340 35,661 37,336
Dari table 4.8 diatas dapat dilihat bahwa terjadi kenaikan suhu motor saat pengereman ketika dengan jatuh tegangan 4% maupun 9%. Untuk lebih jelas dapat dibuat grafik sebagai berikut:
Gambar 4.8 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian dan pembahasan yang dilakukan, diperoleh kesimpulan sebagai berikut :
1. Motor induksi tiga phasa saat pengereman terjadi kenaikan temperatur dengan tegangan nominal (normal) yaitu 0.230C/menit untuk tegangan normal, 0.207 0C/menit untuk jatuh tegangan 4%% dan 0,253 0C/menit untuk jatuh tegangan 9% pengukuran menggunakan thermometer infrared. Sedangkan pengukuran menggunakan pengukuran resistansi
yaitu 0,395 0C/menit untuk tegangan nominal (normal), 0,322 0C/menit untuk jatuh tegangan 4% dan 0,378 0C/menit untuk jatuh tegangan 9%. 2. Pengukuran suhu menggunakan thermometer infrared dan dengan
5.2 Saran
Adapun saran dari penulis sebagai pengembangan dari tugas akhir ini adalah sebagai berikut :
1. Melakukan penelitian pengaruh temperatur terhadap pengereman regeneratif, dinamis maupun mekanis.
BAB II
TINJAUAN PUSTAKA
2.1 Umum
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator [1].
Motor induksi memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat keadaan normal dan tidak membutuhkan perawatan yang banyak. Namun, motor induksi memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan tidak bisa dilakukan tanpa merubah efisensi.
2.2 Konstruksi Motor Induksi Tiga Fasa
Secara umum konstruksi motor induksi tiga fasa terdiri dari stator dan rotor. Stator merupakan bagian dari mesin yang tidak berputar dan terletak pada bagian luar. Sedangkan rotor merupakan bagian dari mesin yang berputar dan letaknya pada bagian dalam.
Belitan stator yang dihubungkan dengan suatu sumber tegangan tiga fasa akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron (
). Medan putar pada stator tersebut akan memotong konduktor – konduktor pada rotor, sehingga terinduksi arus dan sesuai dengan hukum Lentz, rotor pun akan turut berputar mengikuti medan putar stator. Perbedaan putaran relatif antara stator dan rotor disebut slip. Bertambahnya beban akan memperbesar kopel motor yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah maka putaran rotor cenderung menurun. Dikenal dua tipe motor induksi (lihat gambar 2.1) yaitu motor induksi dengan rotor belitan dan motor induksi dengan rotor sangkar.
(a)Kumparan stator (b) Rotor belitan (c) Rotor sangkar
Gambar 2.1 : Kontruksi motor induksi tiga phasa
2.3 Prinsip Kerja Medan Putar
Disini akan dijelaskan bagaimana terjadinya medan putar itu, perhatikan gambar 2.2.
Gambar 2.2 : proses terjadinya medan putar
Misalkan kumparan a-a, b-b, c-c dihubungkan tiga phasa, dengan beda phasa masing – masing 120° (gambar 2.2) dan dialiri arus sinusoid. Distribusi , , sebagai fungsi waktu adalah seperti gambar 2.2. Pada keadaan , , dan fluks resultan yang ditimbulkan oleh kumparan tersebut masing masing adalah seperti gambar 2.2 c, d, e dan f. Pada fluks resultan mempunyai arah sama dengan arah fluks dihasilkan oleh kumparan b-b. Untuk , fluks resultannya berlawanan arah dengan fluks resultan yang dihasilhan pada saat .
1) Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar sesuai dengan perputaran sekrup (gambar 2.3.a ).
2) Kebesaran fluks yang ditimbulkan ini sebanding dengan arus yang mengalir.
Gambar 2.3: Arah gaya (F) yang ditimbulkan fluks
Notasi yang dipakai untuk menyatakan positif atau negatifnya arus yang mengalir pada kumparan a – a, b – b, dan c – c pada Gambar 2.3 yaitu: harga positif, apabila tanda silang (x) terletak pada pangkal konduktor tersebut ( titik a, b, c ), sedangkan negatif apabila tanda titik ( . ) terletak pada pangkal konduktor tersebut. Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4, dapat dilihat pada Gambar 2.4.
2.4 Prinsip Kerja Motor Induksi Tiga Fasa
Untuk memperjelas prinsip kerja motor induksi tiga phasa, Ada beberapa prinsip kerja motor induksi tiga phasa:
Gambar 2.5: prinsip kerja motor induksi 3 phasa
1. Pada keadaan beban nol ketiga phasa stator yang terhubung dengan sumber tegangan tiga phasa yang setimbang akan menghasilkan arus pada tiap belitan phasa arus pada tiap phasa menghasilkan fluksi bolak – balik yang berubah -ubah.
2. akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya :
3. Resultan dari ketiga fluksi bolak – balik tersebut menghasilkan medan putar yang bergerak dengan kecepatan sinkron ns yang besarnya ditentukan oleh
jumlah kutub p dan frekuensi stator f yang dirumuskan :
besarnya :
Dimana:
E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam (volt)
N2 = jumlah lilitan rotor Φm= fluksi maksimum (Wb)
5. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan arus I2
6. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
7. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah dengan medan putar stator.
8. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan putar stator ( ) dengan kecepatan rotor ( ) disebut slip (s) dan dinyatakan dengan :
9. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya :
dimana :
= tegangan induksi rotor dalam keadaan berputar (volt)
keadaan berputar )
10.Bila = , tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, sehingga tidak akan dihasilkan kopel. Kopel akan dihasilkan jika < .
2.5Rangkaian Ekivalen Motor Induksi
Untuk mempermudah analisis motor induksi, digunakan metoda rangkaian ekivalen per – fasa. Motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat digambarkan sebagai berikut :
Gambar 2.6: Rangkaian ekivalen stator dimana :
= arus eksitasi (Amper)
= tegangan terminal stator ( Volt )
= ggl lawan yang dihasilkan oleh fluks celah udara resultan ( Volt ) = arus stator ( Ampere )
= tahanan efektif stator ( Ohm ) = reaktansi bocor stator ( Ohm )
tambahan yang diperlukan untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi ggm .
Komponen arus penguat terbagi atas komponen rugi – rugi inti yang
sefasa dengan dan komponen magnetisasi yang tertinggal 90° dari . Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya ( rotor )
dan tegangan yang diinduksikan pada rotor ekivalen ( ) adalah :
atau
=
dimana adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya kali jumlah lilitan rotor.
Bila rotor – rotor diganti secara magnetik, lilitan – ampere masing – masing harus sama, dan hubungan antara arus rotor sebenarnya I rotor dan arus
pada rotor ekivalen adalah :
=
sehingga hubungan antara impedansi bocor frekuensi slip dari rotor ekivalen dan impedansi bocor frekuensi slip dari rotor sebenarnya adalah :
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang referensinya ke stator. Selanjutnya persamaan dapat dituliskan :
dimana :
R2 = tahanan efektif referensi ( Ohm )
sX2 = reaktansi bocor pada X2 ( Ohm ).
Reaktansi yang didapat pada persamaan dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron. Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi slip sebesar dan ggl lawan stator . Bila bukan karena efek kecepatan, tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator dan rotor adalah:
= =
Dari persamaan diatas dapat disubsitusikan untuk menyamakan E1 dan E2s
dengan membagi E2s dengan slip.
Gambar 2.7: Rangkaian ekivalen motor induksi
Gambar 2.8: Penyederhanaan rangkaian ekivalen motor induksi 2.6Desain Motor Induksi Tiga Phasa
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam empat kelas yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat dilihat pada gambar 2.9.
.Gambar 2.9 Karakteristik torsi kecepatan motor induksi pada berbagai desain 1. Kelas A
Motor Induksi 3 fasa kelas A memiliki karakteristik sebagai berikut
Arus awal relatif tinggi dan Slip rendah ( 0.0015 < Slip < 0.005 ) Tahanan rotor kecil sehinga efisiensi tinggi
Baik digunakan untuk torsi beban kecil saat start dan cepat mencapai putaran penuhnya.
contoh : pompa dan fan 2. Kelas B
Motor Induksi 3 fasa kelas B memiliki karakteristik sebagai berikut Torsi awal normal hampir sama seperti kelas A
Arus awal rendah ( lebih rendah 75% dari kelas A ) dan Slip rendah (slip < 0.005)
Arus awal dapat diturunkan karena rotor mempunyai reaktansi tinggi Rotor terbuat dari plat atau saklar ganda
Efisiensi dan faktor dayanya pada saat berbeban penuh tinggi. Contoh : fan, blower, dan motor generator set
3. Kelas C
Motor Induksi 3 fasa kelas C memiliki karakteristik sebagai berikut Torsi awal lebih tinggi (200 % dari nilai ratingnya)
Arus awal rendah dan Slip rendah (slip < 0.005) Reaktansi rotor lebih tinggi dari kelas B
Rotor menggunakan sankar rendah
Saat beban penuh slip cukup tinggi sehingga efisiensinya rendah (lebih rendah dari kelas A dan Kelas B).
4. Kelas D
Motor Induksi 3 fasa kelas D memiliki karakteristik sebagai berikut Torsi awal yang paling tinggi dari kelas lainnya
Arus awal rendah dan Slip tinggi
motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan kecepatan secara mendadak pada motor
Ketika torsi maksimum slip mencapai harga 0.5 atau lebih, sedangkan ketika beban penuh slip antara 8% hingga 15% sehingga efisiensinya rendah.
contoh : elevator, crane, dan ekstraktor. 2.7 Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan, dan pengukuran tahanan dc lilitan stator.
2.7.1 Pengujian Tanpa Beban ( No Load Test )
Pengujian tanpa beban pada motor induksi akan memberikan keterangan berupa besarnya arus magnetisasi dan rugi – rugi tanpa beban. Biasanya pengujian tersebut dilakukan pada frekuensi yang diizinkan dan dengan tegangan tiga phasa dalam keadaan setimbang yang diberikan pada terminal stator. Pembacaan diambil pada tegangan yang diizinkan setelah motor bekerja cukup lama, agar bagian – bagian yang bergerak mengalami pelumasan sebagaimanamestinya. Rugi
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil dan hanya diperlukan untuk menghasilkan torsi yang cukup untuk mengatasi gesekan. Karenanya rugi – rugi I2R tanpa beban cukup kecil dan dapat diabaikan. Pada transformator rugi – rugi I2R primernya tanpa beban dapat diabaikan, akan tetapi rugi – rugi stator tanpa beban motor induksi besarnya cukup berarti karena arus magnetisasinya lebih besar. Besarnya rugi – rugi rotasional PR pada keadaan
kerja normal adalah :
Dimana :
P1 = daya input tiga phasa
I0 = arus tanpa beban tiap phasa ( A )
R0 = tahanan stator tiap phasa ( ohm )
Karena slip pada keadaaan tanpa beban sangat kecil, maka akan mengakibatkan tahanan rotor R2/s sangat besar. Sehingga cabang paralel rotor dan
cabang magnetisasi menjadi jXm di shunt dengan suatu tahanan yang sangat
besar, dan besarnya reaktansi cabang paralel karenanya sangat mendekati Xm.
Sehingga besar reaktansi yang tampak X0 yang diukur pada terminal stator pada
keadaan tanpa beban sangat mendekati X1 + Xm, yang merupakan reaktansi
sendiri dari stator, sehingga :
Di mana V0 merupakan tegangan line, pada pengujian tanpa beban.
Besarnya tahanan pada pengujian tanpa beban Rnl adalah :
P0 merupakan suplai daya tiga phasa pada keadaan tanpa beban, maka
besar reaktansi tanpa beban
sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi seperti gambar 2.10 berikut :
Gambar 2.10 Rangkaian ekivalen motor induksi pada percobaan beban nol
2.6.2 Pengujian Tahanan Stator ( DC Test )
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test DC.
Pada dasarnya tegangan DC diberikan pada belitan stator motor induksi. Karena arus yang disuplai adalah arus DC, maka tidak terdapat tegangan yang diinduksikan pada rangkaian rotor sehingga tidak ada arus yang mengalir pada rotor. Dalam keadaan demikian, reaktansi dari motor juga bernilai nol, oleh karena itu, yang membatasi arus pada motor hanya tahanan stator.
rated, yang mana hal ini bertujuan untuk memanaskan belitan stator pada temperatur yang sama selama operasi normal. Apabila tahanan stator dihubung Y, maka besar tahanan stator/ phasa adalah :
Bila stator dihubung delta, maka besar tahanan stator.
Dengan diketahuinya nilai dari R1, rugi – rugi tembaga stator pada beban
nol dapat ditentukan, dan rugi – rugi rotasional dapat ditentukan sebagai selisih dari daya input pada beban nol dan rugi – rugi tembaga stator. Gambar 2.11 menunjukkan salah satu bentuk pengujian DC pada stator motor induksi yang terhubung Y.
Gambar 2.11 Rangkaian pengukuran untuk DC test
2.6.3 Pengujian Rotor Tertahan ( Block Rotor Test )
Pengujian ini bertujuan untuk menentukan parameter – parameter motor induksi, dan biasa juga disebut dengan locked rotor test. Pada pengujian ini rotor dikunci/ ditahan sehingga tidak berputar.
Rangkaian ekivalen untuk pengujian ini ada pada gambar 2.12
Gambar 2.12 Rangkaian ekivalen motor induksi pada percobaan block rotor test
Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2. Karena
nilai R2 dan X2 begitu kecil, maka arus input akan seluruhnya mengalir melalui
tahanan dan reaktansi tersebut. Oleh karena itu, kondisi sirkit pada saat ini terlihat seperti kombinasi seri X1, R1, X2, dan R2. Sesudah tegangan dan frekuensi diatur,
arus yang mengalir pada motor diatur dengan cepat, sehingga tidak timbul kenaikan temperatur pada rotor dengan cepat. Daya input yang diberikan kepada motor adalah :
Dimana :
Vl-l = tegangan line pada saat pengujian berlansung
Il-l = arus line pada saat pengujian berlangsung
Dimana :Zsc = impedansi hubung singkat
Tahanan block rotor :
Sedangkan reaktansi block rotor X’sc = X1’ + X2’
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi pengujian
Nilai dari R1 ditentukan dari test DC. Karena reaktansi berbanding
langsung dengan frekuensi, maka reaktansi ekivalen total ( Xsc ) pada saat
frekuensi operasi normal
Untuk memisahkan harga X1 dan X2, maka dapat digunakan tabel 1.
Tabel 2. 1 Distribusi reaktansi X1 dan X2 pada berbagai desain motor induksi
Desain Kelas X1 X2
A 0.5 Xsc 0.5 Xsc
B 0.4 Xsc 0.6 Xsc
C 0.3 Xsc 0.7 Xsc
D 0.5 Xsc 0.5 Xsc
2.8 Pengereman pada motor induksi 3 fasa
Ada 4 macam metode pengereman pada motor induksi 3 phasa, yaitu: a. Regeneratif
Pengereman jenis regeneratif motor AC adalah sebuah sistem pengoperasian pengereman, motor induksi digerakkan oleh beban diatas kecepatan sinkron. Pada saat motor digerakkan diatas kecepatan sinkron, maka motor listrik berfungsi seperti sebuah generator induksi dan menghasilkan torsi pengereman. Energi yang dibentuk motor dialirkan kembali menuju saluran suplai.
b. Pengereman mekanik
Pengereman mekanik adalah cara memberhentikan motor listrik dengan memberlakukan gesekan atau friksi motor. Friksi tersebut diterapkan dengan cara yang sama seperti halnya block rem mobil.
Rem tersebut bekerja setelah daya hilang, yaitu block rem mengunci motor dengan gaya kerja pegas. Pada saat daya dihubungkan, solenoid diberi energi untuk menjaga agar armature tetap tertutup. Jika armature tertutup, maka pegas tertahan balik sehingga tetap mengerem motor. Rem mekanik dipakai pada sistem pengereman jika yang ada tidak cukup untuk membuat motor sehingga benar – benar berhenti.
c. Pengereman dinamik
Cara yang dipergunakan sebagai pengereman adalah menghilangkan suplay daya AC dari motor dan memberikan arus searah DC pada satu fasa stator. Pada pengereman dinamik, motor diberi reaksi seperti generator yang dibebani dan membangkitkan torsi sehingga memperlambat putaran motor serta dengan cepat menghentikan putaran motor. Pengereman dinamik menggunakan rangkaian dioda untuk megubah arus bolak balik (AC) menjadi arus searah (DC). Pengereman secara dinamik dapat menghentikan putaran tanpa terjadi sisa putaran pada motor karena pemberian arus DC pada belitan stator.
d. Pengereman plugging
Plug breaking merupakan pengereman motor dengan cara membalikkan arah motor sehingga motor dapat menghasilkan daya torsi penyeimbang dan membentuk daya perlambatan. Pada pengereman plungging sumber tegangan yang bekerja pada sirkuit jangkar adalah ( stator + rotor) yang disebut counter ggl stator. Hal ini akan menyebabkan kenaikan arus pada stator yang mencapai 50 kali arus mula. Sehingga semakin besar arus pada kumparan stator maka nilai hambatan akan semakin kecil, hal ini mempengaruhi terhadap suhu pada motor induksi tiga phasa.
= perubahan hambatan terhadap T = hambatan awal
= koefisien suhu = perubahan suhu
Sekamin besar hambatan R maka arus yang mengalir akan semakin kecil. Grafik hubungan hambatan dengan suhu adalah sebagai berikut:
Gambar 2.13 : hubungan R (hambatan) dengan T (suhu)
Kita bisa menghentikan motor bahkan lebih cepat dengan menggunakan metode yang disebut plugging. Ini terdiri dari tiba-tiba membalikkan arus medan dengan membalik terminal sumber, seperti ditunjukan pada gambar 2.14 dibawah.
Gambar 2.14: Kurva Kecepatan Pengereman
2 To. Di sisi lain, jika pengereman dinamis digunakan, kecepatan masih 25 persen dari nilai aslinya pada saat ini.
Pada pengereman plugging dilakukan balik putaran pada motor induksi tiga phasa tanpa menekan tombol stop pada rangkaian kontrol. Untuk membalik arah putaran motor induksi 3 fasa adalah dengan membalik salah satu polaritas tegangan yang masuk ke motor. coba perhatikan gambar dibawah ini.
Gambar 2.15: Rangkaian membalikkan putaran
Pada gambar diatas terlihat kalau motor akan berputar ke kanan (forward) jika terminal belitan/winding motor menerima tegangan RST dengan R terhubung dengan U, S terhubung dengan V dan T terhubung dengan W. Dan motor akan berputar ke arah sebaliknya (reverse) jika terminal winding motor menerima tegangan RST dengan R terhubung dengan U, S terhubung dengan W dan T terhubung dengan V. Dengan kata lain tegangan RST dibalik menjadi RTS. Membalik dengan polaritas yang lain juga bisa, seperti R dengan S, atau R dengan T.
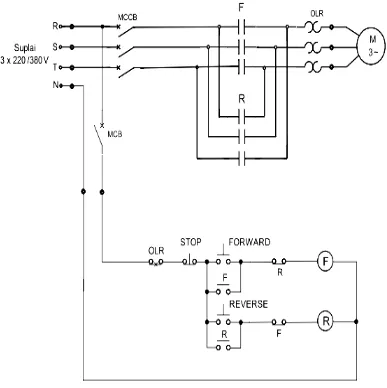
kontaktor. Dan sebagai pengaman motor dipasang juga pelindung motor (thermal overload). Perhatikan gambar diagram utama/daya forward reverse berikut ini.
Gambar 2.16: Rangkaian forward dan reverse pada motor induksi tiga phasa Gambar 2.16 menunjukkan bahwa motor akan berputar ke kanan(forward), jika K1 bekerja. Saat kontaktor 1 bekerja, tegangan RST akan masuk ke motor secara berurutan. Dan gambar diatas juga menjelaskan kalau motor akan berputar ke kiri(reverse), jika K2(kontaktor 2) bekerja. Saat K2 bekerja maka polaritas tegangan RST yang masuk kemotor akan dibalik menjadi TSR.(lihat gambar diatas).dan yang terjadi adalah motor akan berputar ke kiri.
Gambar 2.17: Rangkaian kendali forward dan reverse motor induksi tiga phasa
dengan membalik putaran (reverse) sehingga K1 off dan tombol ON2 sekarang bisa ditekan untuk mengaktifkan koil K2. Sehingga motor bisa berputar ke kiri (reverse) ketika putaran mendekati nol maka di tekan tombol OFF.
2.9Metode Pengukuran Temperatur
Berikut ini adalah metode dalam menentukan temperatur motor induksi [4] yaitu :
a. Menggunakan thermometer Infrared
Metode ini adalah penentuan suhu dengan sensor suhu, atau dengan termokopel, dengan metode ini instrumen diterapkan pada bagian terpanas dari mesin yang dapat diakses .
b. Mengukur Temperatur Lilitan motor
Penentuan temperature dengan metode ini yaitu dengan membandingkan tahanan lilitan motor pada temperature yang ingin ditentukan dengan tahanan yang sudah diketahui temperaturnya. Temperature tahanan yang ingin ditentukan dapat dihitung dengan persamaaan :
Dimana : Tt : Temperatur total lilitan (oC)
Tb : Temperatur pada saat motor dingin (oC)
Rt : Tahanan pada saat motor panas (ohm)
Rb : Tahanan pada saat motor dingin (ohm)
225 ( konstanta untuk bahan aluminium ) (oC)
c. Menggunakan Pendeteksi Temperatur Lokal
Denga pendeteksi temperature lokal berbagai panas bagian mesin dapat ditentukan dengan menggunakan detektor ini.detektor ini ditempatkan di dekat dengan bagian mana suhu lokal akan diukur . Contoh detektor suhu local, sensor inframerah, termokopel, termometer resistensi kecil, dan termistor. Detector ini sering dipasang sebagai bagian permanen dari mesin .
2.10 Jatuh Tegangan (Voltage Drop)
Jatuh tegangan merupakan besarnya tegangan yang hilang pada suatu penghantar. Jatuh tegangan atau jatuh tegangan pada saluran tenaga listrik secara umum berbanding lurus dengan panjang saluran dan beban serta berbanding terbalik dengan luas penampang penghantar [2].
Besarnya jatuh tegangan dinyatakan baik dalam % atau dalam besaran volt. Besarnya batas atas dan batas bawah ditentukan oleh kebijaksanaan perusahaan kelistrikan. Perhitungan jatuh tegangan praktis pada batas – batas tertentudengan hanya menghitung besarnya tahanan masih dapat dipertimbangkan, namun pada sistem jaringan khususnya pada sistem tegangan menengah masalah induktansi dan kapasitansinya diperhitungkan karena nilainya cukup berarti.
1. Aliran arus melalui penghantar - semakin tinggi arus, semakin besar tegangan drop
2. Impedansi konduktor - semakin besar impedansi, semakin besar tegangan drop
Untuk sistem suplay tegangan AC , metode menghitung jatuh tegangan (voltage drop) adalah dengan berdasarkan faktor beban dengan mempertimbangkan arus beban penuh pada suatu sistim. Tetapi jika beban memiliki arus startup tinggi (misalnya motor) , maka tegangan drop dihitung dengan berdasarkan pada arus start up motor tersebut serta faktor daya .
Dimana :
∆V = jatuh tegangan pada kawat (volt)
k = 2 untuk sistem satu fasa (1φ)
k = untuk sistem tiga fase (3φ) = arus beban (A)
L = panjang penghantar (km)
n = jumlah penghantar paralel perfasa
R = tahanan satu kabel (Ω /km)
X = reaktansi satu kabel (Ω /km)
Atau dapat juga ditulis alam bentuk persentase :
Dimana :
∆ V = jatuh tegangan (volt)
Vs = tegangan di sisi pengirim (volt) Vr = tegangan di sisi penerima (volt)
∆V (%) = rugi tegangan dalam persen
BAB I
PENDAHULUAN
1.1Latar Belakang
Motor induksi merupakan motor yang paling umum digunakan pada berbagai peralatan industri. Kelebihannya adalah yang sederhana, murah dan mudah didapat serta dapat langsung disambungkan kesumber AC tiga fasa. Dalam aplikasinya motor induksi dituntut memiliki kinerja yang tinggi. Tetapi hal itu tidak dapat sepenuhnya tercapai mengingat adanya gangguan berupa jatuh tegangan.
Turunnya tegangan yang disuplai ke motor akan menyebabkan kinerja motor induksi berkurang. Begitu juga sebaliknya, saat motor induksi melakukan pengereman diharapkan tegangan pada motor induksi stabil. Tetapi hal itu tidak sepenuhnya dapat tercapai karena adanya gangguan berupa jatuh tegangan. Turunnya tegangan pada motor induksi saat melakukkan pengereman berpengaruh terhadap temperatur dan kinerja motor induksi itu sendiri.
Jatuh tegangan saat pengereman pada motor induksi tiga phasa akan mengakibatkan pemanasan yang berlebih pada motor induksi tersebut. Hal ini dikarenakan adanya arus yang berlebih saat pengereman dilakukan sehingga terjadi pemanasan pada kumparan. Kenaikan temperatur motor induksi dapat diukur dengan menggunakan alat thermometer infrared ataupun dengan metode mengukur resistansi pada motor induksi.
mempengaruhi kenaikan temperatur saat pengereman pada motor induksi, serta membandingkan temperatur motor induksi hasil pengukuran yang didapat dengan menggunakan thermometer infrared dan dengan mengukur resistansi motor induksi tersebut.
1.2Perumusan Masalah
Adapun rumusan masalah dari tugas akhir ini adalah sebagai berikut:
1. Bagaimana kondisi panas motor induksi tiga phasa dalam kondisi tegangan normal dan jatuh tegangan pada saat pengereman metode plugging dengan menggunakan thermometer infrared dan pengukuran resistansi, serta membandingkan panas yang didapat.
1.3Tujuan Penelitian
Adapun tujuan dari penulisan ini adalah sebagai berikut:
1. Mengetahui panas motor induksi tiga phasa dalam kondisi tegangan normal dan jatuh tegangan pada saat pengereman dengan metode plugging.
1.4Batasan Masalah
Adapun batasan masalah dari penulisan tugas akhir ini adalah sebagai berikut:
1. Tidak menganalisa gangguan dan harmonisa tegangan yang terjadi pada sistem tenaga.
3. Hanya membandingkan metode pengukuran menggunakan thermometer infrared dan metode pengukuran resistansi.
4. Analisa data berdasarkan peralatan yang tersedia di laboratorium Konversi Energi Listrik FT. USU.
1.5Manfaat Penelitian
Adapun manfaat penelitian dari penulisan tugas akhir ini adalah sebagai berikut:
1. Untuk memprediksi panas motor induksi tiga phasa dalam keadaan jatuh tegangan saat pengereman, sehingga dapat menentukan setting alat proteksi.
ABSTRAK
Motor induksi merupakan motor arus bolak balik yang paling sering digunakan dalam dunia industri maupun rumah tangga. Permasalahan pengaruh jatuh tegangan saat pengereman pada motor induksi tiga phasa merupakan salah satu masalah dalam pengoprasian motor induksi tiga phasa.
Oleh karena itu perlu dilakukan suatu kajian baik berupa analisis maupun penelitian di labratorium untuk melihat bagaimana jatuh tegangan saat pengereman mempengaruhi kenaikan temperatur pada motor induksi, serta membandingkan temperature motor induksi hasil pengukuran yang didapat dengan menggunakan thermometer infrared dan dengan metode mengukur resistansi motor induksi tersebut.
TUGAS AKHIR
ANALISIS PENGARUH JATUH TEGANGAN PADA
SAAT PENGEREMAN TERHADAP TEMPERATUR
MOTOR INDUKSI TIGA PHASA
(Aplikasi pada Laboratorium Konversi Energi Listrik)
Diajukan Untuk Memenuhi Persyaratan Menyelesaikan Pendidikan Sarjana (S-1) pada
Departemen Teknik Elektro Sub Konsentrasi Teknik Energi Listrik OLEH:
ASPAR NASUTION NIM: 110402028
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor induksi merupakan motor arus bolak balik yang paling sering digunakan dalam dunia industri maupun rumah tangga. Permasalahan pengaruh jatuh tegangan saat pengereman pada motor induksi tiga phasa merupakan salah satu masalah dalam pengoprasian motor induksi tiga phasa.
Oleh karena itu perlu dilakukan suatu kajian baik berupa analisis maupun penelitian di labratorium untuk melihat bagaimana jatuh tegangan saat pengereman mempengaruhi kenaikan temperatur pada motor induksi, serta membandingkan temperature motor induksi hasil pengukuran yang didapat dengan menggunakan thermometer infrared dan dengan metode mengukur resistansi motor induksi tersebut.
KATA PENGANTAR
Segala puji dan syukur penulis panjatkan kehadirat Allah S.W.T, karena atas berkat rahmat dan ridho-Nya Tugas Akhir ini dapat diselesaikan. Tidak lupa juga shalawat beriring salam penulis haturkan kepada junjungan Nabi Besar Muhammad S.A.W.
Tugas akhir ini merupakan bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan dalam menyelesaikan pendidikan Sarjana Strata Satu (S-1) di Departemen Teknik Elektro, Universitas Sumatera Utara. Adapun judul Tugas Akhir ini adalah :
“ANALISIS PENGARUH JATUH TEGANGAN PADA SAAT PENGEREMAN
TERHADAP TEMPERATUR MOTOR INDUKSI TIGA PHASA ”
Tugas Akhir ini penulis persembahkan kepada yang teristimewa yaitu Ayahanda (M.Suleman Nst), Ibunda (Yusniati Hsb) serta saudara saya (Ahmad Alwi, Ade Candra, Devi Puspa, dan Anisyah) yang selalu memberikan semangat dan mendoakan penulis selama masa studi hingga menyelesaikan Tugas Akhir ini.
Selama masa kuliah hingga penyelesaian tugas akhir ini, penulis juga banyak mendapatkan dukungan maupun bantuan dari berbagai pihak. Untuk itu penulis ingin menyampaikan rasa terima kasih yang mendalam kepada :
memberikan bantuan, bimbingan, dan pengarahan kepada penulis selama perkuliahan hingga penyusunan Tugas Akhir ini.
2. Bapak Ir. Syamsul Amin M.S selaku dosen Penguji Tugas Akhir serta selaku kepala Laboratorium Konversi Energi Listrik Departemen Teknik Elektro FT USU yang telah banyak memberikan masukan demi perbaikan Tugas Akhir ini dan telah banyak motivasi selama masa perkuliahan.
3. Bapak Ir. Eddy Warman M.T selaku Dosen Penguji Tugas Akhir dan telah banyak memberikan masukan demi perbaikan Tugas Akhir ini serta senantiasa memberikan bimbingan selama perkuliahan.
4. Seluruh Bapak dan Ibu dosen yang telah mendidik serta memberikan pengalaman hidup yang berharga selama masa perkuliahan kepada penulis.
5. Om Isroy Tanjung, ST (Om roy) selaku pegawai Lab. Koversi Energi Listrik FT-USU yang banyak membantu penulis selama proses pengambilan data maupun dalam keseharian di kampus.
6. Seluruh staf pegawai Departemen Teknik Elektro FT USU yang telah membantu penulis dalam pengurusan administrasi saat perkuliahan serta selama penyusunan tugas akhir.
8. Rekan- rekan satu angkatan 2011 Teknik Elektro Endrawan, Zein, Angga, Yoga, Fikri, Rais, Hasan, Ikhyar, Putra, Rido, Fandi, Faisal, Syahlan, Dhani, Ferdi dll yang tidak bisa namanya disebutkan satu persatu yang selalu saling memberi semangat, bantuan, cerita, selama perkuliahan.
9. Rekan – rekan We Can Do It brother Yusfil, Asnawir, Ray, Chai, Yusuf, Anas, Ammar, Ramlan, Roma, Alwi, Izal, Rozi, Zaid, Dwi, Liya, Tome, Ratih, Lita, Novita, Julek, Serta kawan – kawan Fc Pioneer Bang Dai, bang Bagus, bang Aprial, Yudi, Fahmi, Irwan, Asrin, Yasir, Wildan, Bibi, Nadir, Yusnan, Batar, dan lainnya.
10. Semua pihak yang tidak dapat penulis tuliskan satu persatu.
Penulis menyadari bahwa dalam penulis Tugas Akhir ini masih belum sempurna karena masih terdapat banyak kekurangan baik dari segi isi maupun susunan bahasanya. Saran dan kritik dari pembaca dengan tujuan menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis harapkan. Akhir kata, penulis berharap semoga penulisan Tugas Akhir ini dapat berguna bagi kita semua.
Medan, Februari 2016 Penulis
Aspar Nasution
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... x
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 2
1.3. Tujuan Penelitian ... 2
1.4. Batasan Masalah ... 2
1.5. Manfaat Penelitian ... 3
BAB II TINJAUAN PUSTAKA 2.1. Umum ... 4
2.2. Konstruksi Motor Induksi ... 4
2.3. Prinsip Kerja Medan Putar ... 5
2.4. Prinsip Kerja Motor Induksi ... 8
2.5. Rangkaian Ekivalen Motor Induksi ... 10
2.6 Desain Motor Induksi Tiga Phasa. ... 13
2.7 Penentuan Parameter Motor Induksi ... 15
2.7.1 Pengujian Tanpa Beban (No Load Test) ... 16
2.7.2 Pengujian Tahanan Stator (DC Test) ... 17
2.8 Metode Pengereman Plugging Motor Induksi ... 21
2.9 Metode Pengukuran Temperatur ... 27
2.10 Jatuh Tegangan (Voltage Drop)... 28
BAB III METODE PENELITIAN 3.1. Tempat dan Waktu ... 31
3.2. Peralatan yang Digunakan ... 31
3.3. Variabel yang Diamati ... 32
3.4 Prosedur Penelitian ... 32
3.5 Pelaksanakan Penelitian ... 36
3.5.1 Proses Pengumpulan Data ... 36
3.5.2 Melakukan Analisa Data ... 37
BAB IV HASIL PENELITIAN DAN PEMBAHASAN 4.1. Umum ... 38
4.2. Data Percobaan ... 38
4.2.1 Pengereman Motor Induksi Tiga Phasa dengan Suplai Tegangan Nominal ... 39
4.2.2 Pengereman Motor Induksi Tiga Phasa saat Jatuh Tegangan .. 39
4.3 Analisa Data... 41
4.3.1 Motor Induksi Tiga Phasa saat Pengereman dengan Tegangan Nominal (Normal) ... 42
4.3.3 Perbandingan Hasil Pengukuran Suu Motor Induksi Tiga Phasa saat Pengereman dengan Tegangan Normal dan Jatuh Tegangan 54
BAB V KESIMPULAN DAN SARAN
DAFTAR GAMBAR
Gambar 2. 1 Konstruksi motor induksi tiga phasa ... 5
Gambar 2. 2 Proses terjadinya medan putar... 6
Gambar 2. 3 Arah gaya (F) yang ditimbulkan fluks ... 7
Gambar 2. 4 Vektor resultan F pada keadaan t ... 7
Gambar 2. 5 Prinsip kerja motor induksi 3 phasa ... 8
Gambar 2. 6 Rangkaian ekivalen stator ... 10
Gambar 2. 7 Rangkaian ekivalen motor induksi ... 12
Gambar 2. 8 penyederhanaan rangkaian ekivalen motor induksi ... 13
Gambar 2. 9 Karakteristik torsi kecepatan motor induksi pada berbagai desain ... 13
Gambar 2. 10 Rangkaian ekivalen motor induksi pada percobaan beban nol ... 17
Gambar 2. 11 Rangkaian pengukuran untuk DC test ... 18
Gambar 2. 12 Rangkaian ekivalen motor induksi pada percobaan block rotor test... 19
Gambar 2. 13 Hubungan R (tahanan) dengan T (suhu)... 23
Gambar 2.14 Kurva kecepatan pengereman... 23
Gambar 2.15 Rangkaian membalik putaran . ... 24
Gambar 2.16 Rangkaian forward dan reverse pada motor induksi tiga phasa. ... 25
Gambar 2.17 Rangkaian kendali forward dan reverse motor induksi tiga phasa.. 26
Gambar 3. 1 Rangakaian percobaan pengereman motor induksi tiga phasa dengan rangkaian kontrol ... 33
Gambar 3. 4 Diagram alur proses pengambilan data ... 36 Gambar 4. 1 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan suplai tegangan nominal (normal) pengukuran suhu menggunakan thermometer infrared.. ... 45
Gambar 4. 2 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan suplai tegangan nominal (normal) pengukuran suhu menggunakan metode pengukuran resistansi... .... 45
Gambar 4. 3 Grafik Suhu vs menit untuk motor induksi suplai tegangan saat pengereman denga jatuh tegangan 4% pengukuran suhu menggunakan thermometer infrared ... 52 Gambar 4. 4 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan jatuh tegangan 9% pengukuran suhu thermometer infrared . ... 52 Gambar 4.5 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
jatuh tegangan 4% pengukuran suhu menggunakan metode
pengukuran resistansi ... 51
Gambar 4. 6 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan jatuh tegangan 9% pengukuran suhu menggunakan metode
pengukuran resistansi ... 51
Gambar 4. 8 Grafik Suhu vs menit untuk motor induksi saat pengereman dengan
DAFTAR TABEL
Tabel 2. 1 Distribusi reaktansi X1 dan X2 pada berbagai desain motor induksi . .. 20
Tabel 4. 1 Data hasil pengukuran suhu dengan thermometer infrared. ... 39 Tabel 4. 2 Data hasil percobaan DC test pada motor induksi tiga phasa ... 39 Tabel 4. 3 Data hasil pengukuran suhu saat pengereman dengan jatuh tegangan
4% menggunakan thermometer infrared ... 40 Tabel 4. 4 Data hasil pengukuran suhu saat pengereman dengan jatuh tegangan
9% menggunakan thermometer infrared. ... 40 Tabel 4. 5 Data hasil pengukuran DC test dengan jatuh tegangan 4% ... 41 Tabel 4. 6 Data hasil pengukuran DC test dengan jatuh tegangan 9%. ... 41 Tabel 4. 7 Data hasil perhitungan suhu motor induksi tiga phasa saat
pengereman dengan tegangan normal menggunakan metode pengukuran resistansi ... 43 Tabel 4. 8 Data hasil perhitungan suhu motor induksi tiga phasa saat
pengereman dengan jatuh tegangan 4% menggunakan metode pengukuran resistansi ... 50 Tabel 4. 9 Data hasil perhitungan suhu motor induksi tiga phasa saat pengereman
dengan jatuh tegangan 9% metode pengukuran resistansi. ... 50
Tabel 4. 10 Perbandingan kenaikan suhu saat pengereman tegangan normal dan jatuh tegangan 4% dan 9% menggunakan thermometer infared. ... 54
Tabel 4. 11 Perbandingan kenaikan suhu saat pengereman dengan tegangan
normal dan jatuh tegangan 4% dan 9% menggunakan metode