PEMROGRAMAN ALAT PENGERING KOPI OTOMATIS
BERBASIS MIKROKONTROLER ATMEGA 8
TUGAS AKHIR
ANDRYUS MANIK 122408003
PROGRAM STUDI D-3 FISIKA DEPATERMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PEMROGRAMAN ALAT PENGERING KOPI OTOMATIS
BERBASIS MIKROKONTROLER ATMEGA 8
TUGAS AKHIR
DiajukanUntukMelengkapiTugas Dan MemenuhiSyaratMemperolehGelarAhliMadya
ANDRYUS MANIK 122408003
PROGRAM STUDI D-3 FISIKA DEPATERMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
i
LEMBAR PERSETUJUAN
Judul :Pemrograman Alat Pengering Kopi Otomatis
Berbasis Mikrokontroler ATMega 8
Kategori : Tugas Akhir
Nama / NIM : ANDRYUS MANIK / 122408003
Program Studi : D-3 Fisika
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam
Universitas Sumatra Utara
Disetujui di Medan, 28 Juli 2015
Disetujui Oleh
Ketua Program Studi D-3 Fisika Pembimbing,
Dr. Susilawati, M.Si Dr. Mester Sitepu, M.Sc.M.Phill
ii
LEMBAR PERNYATAAN
PEMROGRAMAN ALAT PENGERING KOPI OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 8
TUGAS AKHIR
Saya mengakui bahwaTugas Akhir ini adalah hasilkarya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebut kansumbernya.
Medan, Juli 2015
iii
PENGHARGAAN
Puji syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa, berkat rahmat dan karuniaNya penulis dapat menyelesaikan Tugas Akhir ini. Tugas akhir ini guna salah satu syarat untuk menyelesaikan program dipoloma 3, program studi D3 Fisika Instrumentasi Univeresitas Sumatera Utara (USU) Medan.Adapun judul Tugas Akhir ini berjudul “PEMROGRAMAN ALAT PENGERING KOPI
OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 8”. meskipun dalam
proses penulisan banyak menemui hambatan dan rintangan namun dengan usaha maksimal yang dilakukan penulis serta bantuan dari berbagai pihak, akhirnya laporan Tugas Akhir ini dapat selesai. Atas bantuan dan motivasi yang diberikan, maka penulis mengucapkan banyak terimakasih kepada Bapak Dr. Mester Sitepu, M.Sc, M.Phill, selaku pembimbing, Ibu Dr. Susilawaty, S.Si M.si, selaku ketua jurusan D-3 Fisika, Bapak Dr. Sutarman, M.Sc, selaku dekan FMIPA USU. Seluruh dosen yang telah memberikan ilmu pengetahuan selama perkuliahan, yang membuka cakrawala berfikir serta pegawai tata usaha yang ikut mensukseskan proses belajar mengajar. Teristimewa penulis mengucapkan terimakasih kepada Ayahanda W. Manik dan Ibunda R. Siboro yang telah memberikan didikan terbaik moril maupin material bagi penulis. Serta seluruh keluarga Putra Jaya Manik,Alvindo Manik dan adik termanis Lusya Manik .Yang selalu mendoakan dan memotivasi penulis. Rekan-rekan di D-3 Fisika Regular 2012, terimak asih atas kerja sama selama perkuliahan. Serta tak lupa juga dengan TTB, Sadarma Epredi Manik , Alfredo Nababan, Iwan Primus Gultom, Sardo Haryson P.Siboro, Junus Marasi Nainggolan, Ferdinand Malau, Yusuf Dominggo Manurung, Wahyu Sitorus, Bangun GJK Sihombing dan Susanto Tumagger. Yang selama ini melewati rintangan , kebersamaan, pahit , manis yang di jalani bersama selama perkuliahan D-3 Fisika jaya selalu bangkit dan sukses untuk kedepan , Buat bang Beny Serigih Munthe ,ST. dan Andika Siregar, S.Si terimakasih atas bing-bingan yang di berikan.Tuhanlah yang membalas semua kebaikan abang. Tugas Akhir ini penulis dedikasikan untuk mereka sebagai ungkapan penghargaan atas keikhlasan, kesabaran, dan kasih sayang yang tak terhingga. Hanya Tuhan Yang Maha Esa yang dapat membalas semua jasa dan kebaikan yang penulis terima dari berbagai pihak yang Telah membantu dalam penyelesaian Tugas Akhir ini. Penulis menyadari dalam penyusunan Tugas Akhir ini masih terdapat kekurangan dan masih jauh dari kesempurnaan. Oleh karena itu, penulis sangat terbuka terhadap saran maupun kritikan dalam sebuah diskusi yang membangun dari pembaca.
Akhir kata penulis mengharapkan semoga Tugas Akhir ini dapat bermanfaat bagi pembaca.
iv
PEMROGRAMAN ALAT PENGERING KOPI OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 8
ABSTRAK
Alat pengering otomatis merupakan hal yang sangat penting dalam dunia industri maupun kehidupan sehari-hari.Banyak peralatan-peralatan berbasis mikrokontroller yang dibuat dengan tujuan mengembangkan alat pengering yang sudah ada selama ini, supaya pengeringan dapat dikerjakan dengan lebih mudah dan praktis. Dengan pengembangan tersebut mikrokontroller mampu mengendalikan suatu program untuk pengeringan dengan menggunakan software BASIC COMPLIER-AVR. Kajian ini bertujuan untuk membuat suatu alat pengering menggunakan mikrokontroller ATMega8 sebagai pengolah data. Pengolahan data tersebut bertujuan untuk mengendalikan sistem dalam pengukuran dengan menanamkan bahasa pemrograman BASIC COMPLIER-AVR yang ada pada mikrokontroller tersebut dan menampilkannya di LCD. Bahasa pemrograman BASIC COMPLIER-AVR merupakan bahasa pemrograman dasar complie, bahasa ini merupakan bahasa pemrograman tingkat tinggi yang mudah dimengerti oleh manusia. Pembuatan atau perancangan alat ini bertujuan untuk memberikan otomatisasi yang dapat membantu kemudahan dalam proses pengeringan. Sistem ini terdiri dari perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras (hardware) terdiri dari sensor LDR (Light Dependent Resistor), sensor hujan, mikrokontroler Atmega 8, motor DC, LCD dan Lampu pijar .Sedangkan perangkat lunak (software) pada sistem ini menggunakan bahasa (BASCOM-AVR) yang diimplementasikan pada mikrokontroler. Sistem ini bekerja berdasarkan intensitas cahaya yang mengenai sensor LDR (Light Dependent Resistor) dan air yang mengenai sensor hujan, input inilah yang digunakan mikrokontroler untuk membuka dan menutup garasi secara otomatis.
vi
vii
DAFTAR TABEL
iv
PEMROGRAMAN ALAT PENGERING KOPI OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 8
ABSTRAK
Alat pengering otomatis merupakan hal yang sangat penting dalam dunia industri maupun kehidupan sehari-hari.Banyak peralatan-peralatan berbasis mikrokontroller yang dibuat dengan tujuan mengembangkan alat pengering yang sudah ada selama ini, supaya pengeringan dapat dikerjakan dengan lebih mudah dan praktis. Dengan pengembangan tersebut mikrokontroller mampu mengendalikan suatu program untuk pengeringan dengan menggunakan software BASIC COMPLIER-AVR. Kajian ini bertujuan untuk membuat suatu alat pengering menggunakan mikrokontroller ATMega8 sebagai pengolah data. Pengolahan data tersebut bertujuan untuk mengendalikan sistem dalam pengukuran dengan menanamkan bahasa pemrograman BASIC COMPLIER-AVR yang ada pada mikrokontroller tersebut dan menampilkannya di LCD. Bahasa pemrograman BASIC COMPLIER-AVR merupakan bahasa pemrograman dasar complie, bahasa ini merupakan bahasa pemrograman tingkat tinggi yang mudah dimengerti oleh manusia. Pembuatan atau perancangan alat ini bertujuan untuk memberikan otomatisasi yang dapat membantu kemudahan dalam proses pengeringan. Sistem ini terdiri dari perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras (hardware) terdiri dari sensor LDR (Light Dependent Resistor), sensor hujan, mikrokontroler Atmega 8, motor DC, LCD dan Lampu pijar .Sedangkan perangkat lunak (software) pada sistem ini menggunakan bahasa (BASCOM-AVR) yang diimplementasikan pada mikrokontroler. Sistem ini bekerja berdasarkan intensitas cahaya yang mengenai sensor LDR (Light Dependent Resistor) dan air yang mengenai sensor hujan, input inilah yang digunakan mikrokontroler untuk membuka dan menutup garasi secara otomatis.
BAB 1 PENDAHULUAN
1.1Latar Belakang Masalah
dihapus kemudian diisi kembali dengan program lain sesuai dengan kebutuhan. Berdasarkan uraian tersebut maka penulis ingin merancang menggunakan mikrokontroller, yang diprogram dengan menggunakan software BASCOM-AVR yang mampu menggerakkan alat pengering kopi otomatis dengan menggunakan kendali program tersebut .Untuk itulah penulis mencoba untuk membuat suatualat dan Penulisan TugasAkhir dengan judul “Pemrograman Alat Pengering Kopi Otomatis Berbasis Mikrokontroler ATMega 8.”
1.2.RumusanMasalah
Berdasarkan latar belakang masalah di atas, permasalahan yang inginditeliti dalam tugas akhir iniadalah sebagai berikut:
1. Bagaimana membuat alat pengering kopi otomatis dengan memanfaatkan mikrokontroller ATMega 8.
2. Bagaimana merancang program yang ditanamkan di mikrokontroller
tersebut untuk mengendalikan rangkaian alat tersebut.
1.3.Tujuan Penulisan
Adapun Tujuan dari penulisan tugas akhir ini sebagai berikut :
1. Memenuhi syarat untuk menyelesaikan masa studi sebagai mahasiswi program Fisika D3
2. Sebagai langkah awal untuk mengaplikasikan ilmu pengetahuan yang di dapat semasa perkuliahan.
1.4.Batasan Masalah
Mengingat pembahasan dalam perancangan alat yang dibuat ini dapat meluas, maka tulisan ini mempunyai batasan masalah sebagai berikut:
1. Perancangan alat ini menggunakan prinsip kerja mikrokontroller
ATMega8.
2. Bahasa pemrograman yang mengendalikan rangkaian ini adalah bahasa pemrograman BASCOM-AVR.
3. Hanya membahas program yang dirancang pada mikrokontroller dan menampilkan settingan manual dan otomatis pada LCD.
1.6 .Manfaat Penulisan
Alat ini dapat dipergunakan untuk pengeringan/penjemuran 1.7.SistematikaPenulisan
Untuk mempermudah pembahasan dan pemahaman, maka penulis membuat sistematika penulisan laporan ini sebagai berikut:
BAB 1 PENDAHULUAN
Meliputi latar belakang masalah, rumusan masalah, tujuan penulisan, batasan masalah, manfaat penulisan, dan sistematika penulisan.
BAB 2 LANDASAN TEORI
BAB 3 PERANCANGAN ALAT DAN PROGRAM
Meliputi tentang perancangan rangkaian dan program yang digunakan.
BAB 4 PENGUJIAN DAN ANALISA
Meliputi pengujian alat dan analisanya.
BAB 5 KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
Dalam Bab ini penulis akan membahas tentang program yang digunakan untuk mengendalikan sistem pada mikrokontroler untuk menggerakkan seluruh komponen yang digunakan pada alat tersebut.Mikrokontroller merupakan alat pengolahan data digital dan analog (fitur ADC padaseri AVR) dalam level tegangan maksimum 5V. Keunggulan mikrokontroller dibanding microprocessor yaitu lebih murah dan didukung dengan software compileryang sangat beragam seperti software compailer C/C++, basic, pascal, bahkan assembler. Sehingga penggunaan dapat memilih program yang sesuai dengan kemampuannya. Dalam hal penggunaan, mikrokontroller dapat dibedakan jenis dan tipenya, seperti mikrokontroller atmega 8, atmega 8535, atmega 16 dan lain-lain.
2.1.Bahasa Pemograman BASCOM-AVR
pemograman berlevel tinggi relatif mudah digunakan, karena ditulis dengan bahasa manusia yang lebih mudah dimengerti dan tidak tergantung pada mesin.
Penulisan program dalam bahasa BASCOM-AVR ini tidak mengenal aturan penulisan dikolam tertentu. Jadi bisa dimulai dari kolom manapun. Namun demikian, untuk mempermudah dalam pembacaan program dan untuk keperluan dokumentasi, sebaiknya penulisan program dalam bahasa BASCOM-AVR ini diatur sedemikian rupa sehingga mudah dibaca.
2.2. Mikrokontroler ATMega8
Mikrokontroller merupakan alat pengolahan data digital dan analog (fitur ADC pada seri AVR) dalam level tegangan maksimum 5V. Keunggulan mikrokontroller dibanding microprocessor yaitu lebih murah dan didukung dengan software compiler yang sangat beragam seperti software compailer C/C++, basic, pascal, bahkan assembler. Sehingga penggunaan dapat memilih program yang sesuai dengan kemampuannya. Dalam hal penggunaan, mikrokontroller dapat dibedakan jenis dan tipenya, seperti mikrokontroller atmega 8, atmega 8535, atmega 16 dan lain-lain.
2.2.1. Arsitektur mikrokontroller ATMega 8
Gambar 2.1.Arsitektur ATMega8
mikrokontroller ATMega8 ada dua pilihan ,dengan menggunakan board ATMega8 develompment board yang sudah ada diparaan atau dengan membuat rangkaian sendiri. Jika menggunakan rangkaian mikrokonter yang sudah tersedia dipasaran maka akan memepersingkat waktu pembuatan sistem, karena hanya tinggal membeli rangkaian berupa kit dan hanya tinggal menggunakannya. Chip yang dijelaskan di sini menggunakan kemasan PDIP, untuk kemasan yang lain ( TQPF, QFN / MLF ) tidak jauh berbeda. Untuk lebih jelasnya silahkan merujuk ke data sheet. Nama nama pin di atas usahakan lebih sering dikenal, hal ini berguna untuk penggunaan pheripheral internal.
2.2.2. Fitur ATMega8
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega8 : A. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
B. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit. C. Tiga buah timer counter, dua diantaranya memiliki fasilitas pembanding. D. CPU dengan 32 buah register
E. Watchdog timer dan oscillator internal. F. SRAM sebesar 1K byte.
G. Memori flash sebesar 8K Bytes system Self-programable Flash H. Unit interupsi internal dan eksternal.
I. Port antarmuka
J. EEPROM sebesar 512 byte.
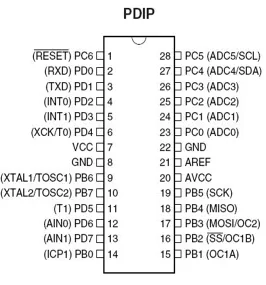
2.2.3 Konfigurasi Pin ATMega8
ATMega8 memiliki 28 pin yang masing-masing pin-nya memiliki fungsi yang berbeda-beda baik sebagai port ataupun sebagai fungsi yang lain. Berikut akan dijelaskan tentang kegunaan dari masing-masing kaki pada ATMega8.
Gambar 2.2.Pin Konfigurasi pada ATMega 8
2.2.4. Deskripsi pin-pin pada mikrokontroler ATMega8 1. VCC
Merupakan supply tegangan untuk digital. 2. GND
3. Port B
Adalah 8 buah pin mulai dari pin B.0 sampai dengan pin B.7. Tiap pin dapat digunakan sebagai input dan juga output. Port B merupakan sebuah 8-bit bit directional I/O port dengan inernal pull-up resistor. Sebagai input, pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Jika ingin menggunakan tambahan kristal, maka cukup untuk menghubungkan kaki dari kristal ke keki pada pin port B. Namun jika tidak digunakan, maka cukup untuk dibiarkan saja. Pengguna kegunaan dari masing-masing kaki ditentukan dari clock fuse setting-nya.
4. Port C
Port C merupakan sebuah 7-bit bi-directional I/O yang di dalam masing-masing pin terdapat pull-up resistor. Jumlah pin-nya hanya 7 buah mulai dari C.0 sampai dengan pin C.6. Sebagai keluaran / output, port C memiliki karakteristik yang sama dalam hal kemampuan menyarap arus ( sink ) ataupun mengeluarkan arus ( source).
5. Reset / PC6
6. Port D
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
7. AVCC
Pada pin ini memiliki fungsi sebagai power supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkanjika ACD pada AVR tidak digunakan, tetap saja disarankan untuk menghubungkan secara terpisah dengan VCC. Cara menghubungkan AVCC adalah melewati low-pass filter setelah itu dihubungkan dengan VCC.
8. AREF
sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal iini harus dilakukan melalui software.
9. Bit 7 (1)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang secara individual maupun yang secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi dengan instruksi SEI dan CLI.
10. Bit 6 (T)
Merupakan bit Copy Storage. Instruksi bit Copy Instruction BLD ( Bit LoaD ) dan BST ( Bit Store ) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dan Register File dapat disalin ke dalam bit ini dengan menggunakan intruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam sebuah bit di register pada Register File dengan menggunakan perintah BLD.
11. Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD.
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif di antara Negative Flag (N) dan Two’s Complement Overflow Flag (V).
13. Bit 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
14. Bit 2 (N)
Merupakan bit Negative Flag. Bit ini menyediakan sebuah hasil negative di dalam sebuah fugnsi logika atau aritmatika.
15. Bit 1 (Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “ 0 ” dalam sebuah fungsi aritmatika atau logika.
16. Bit 0 (C)
Meruapakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah fugnsi aritmatika atau logika.
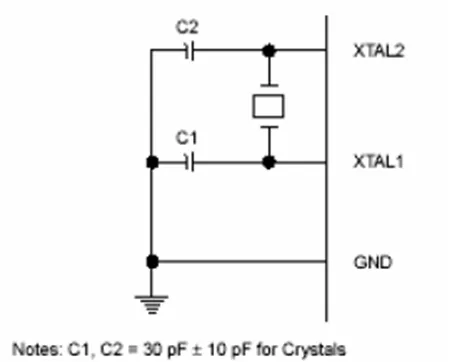
2.2.5. Sistem Clock pada Mikrokontroller ATMega 8
Gambar 2.3.Sistem Clock pada ATMega8
2.2.6.Peta Memori
ATmega8memilikidua ruang memori utama, yaitu memori data dan memori program.Selain dua memori utama, ATmega8 juga memiliki fitur EEPROM yang dapat digunakan sebagai penyimpan data.
2.2.6.1 Flash Memory
2.2.6.2 SRAM
ATmega8 memiliki 608 alamat memori data yang terbagi menjadi 3 bagian, yaitu 32 buah register file, 64 buah IO register dan 512 byte internal SRAM. Peta Memori ATmega8 memiliki dua ruang memori utama, yaitu memori data dan memori program. Selain dua memori utama, ATmega8 juga memiliki fitur EEPROM yang dapat digunakan sebagai penyimpan data.
2.2.6.3 EEPROM
ATmega8 juga memiliki memori data berupa EEPROM 8 bit sebesar 512 byte ($000-$1FF).
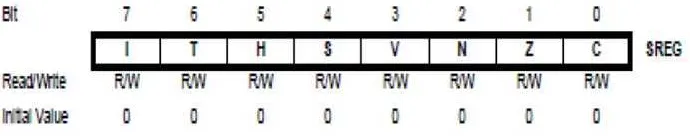
2.2.6.4 Status Register (SREG)
Register SREG digunakan untuk menyimpan informasi dari hasil operasi aritmatika yang terakhir. Informasi-informasi dari register SREG dapat digunakan untuk mengubah alur program yang sedang dijalankan dengan menggunakan instruksi percabangan. Data SREG akan selalu akan berubah setiap instruksi atau operasi pada ALU dan datanya tidak otomatis tersimpan apabila terjadi instruksi percabangan baik karena interupsi maupun lompatan.
2.1.6.1Status Register
Gambar 2.4.Status Register ATMega8
Status Register ATMega8 : a. Bit 7 (I)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian lain. Jika bit ini di-set, maka semua perintah interupsi baik yang individual maupun secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi dengan instruksi SEI dan CLI.
b. BIT 6 (T)
c. BIT 5 (H)
Merupakan bit Half Cary Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD.
d. BIT 4 (S)
Merupakan Signbit. Bit ini selalu merupakan sebuah eksklusif diantara Negative
Flag (N) dan Two’s Complement OverflowFlag (V). e. BIT 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi- fungsi aritmatika dua komplemen.
f. BIT 2 (N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negatif di dalam sebuah fungsi logika atau aritmatika.
g. BIT 1 (Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “0” dalam sebuah fungsi arimatika atau logika.
h. BIT 0 (C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah carry atau sisa dalam sebuah fungsi aritmatika atau logika.
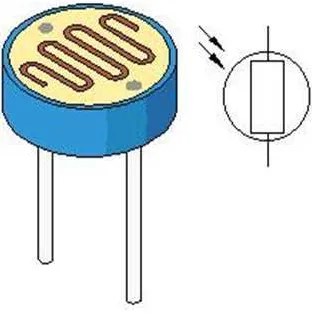
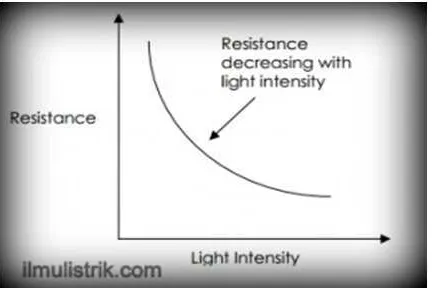
2.3 Light Dependent Resistor (LDR)
perubahan penerimaan cahaya. Besarnya nilai hambatan pada Sensor Cahaya LDR (Light Dependent Resistor) tergantung pada besar kecilnya cahaya yang diterima oleh LDR itu sendiri. LDR sering disebut dengan alat atau sensor yang berupa resistor yang peka terhadap cahaya. Biasanya LDR terbuat dari cadmium sulfida yaitu merupakan bahan semikonduktor yang resistansnya berupah-ubah menurut banyaknya cahaya (sinar) yang mengenainya.
Sebuah light dependent resistor (LDR) terdiri dari sebuah piringan bahan semikonduktor dengan dua buah elektroda pada permukaannya. Dalam gelap atau di bawah cahaya yang redup, bahan piringan hanya mengandung elektron bebas dalam jumlah yang relatif sangat kecil. Hanya tersedia sedikit elektron bebas untuk mengalirkan muatan listrik. Dengan kata lain, nilai hambatan bahan sangat tinggi.
Gambar 2.5. Light Dependent Resistor
2.3.1 Karakteristik Sensor Cahaya LDR (Light Dependent Resistor) Sensor Cahaya LDR (Light Dependent Resistor) adalah suatu bentuk komponen yang mempunyai perubahan resistansi yang besarnya tergantung pada cahaya. Karakteristik LDR terdiri dari dua macam yaitu Laju Recovery dan Respon Spektral sebagai berikut :
2. Respon Spektral Sensor Cahaya LDR (Light Dependent Resistor) Sensor Cahaya LDR (Light Dependent Resistor) tidak mempunyai sensitivitas yang sama untuk setiap panjang gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan sebagai penghantar arus listrik yaitu tembaga, aluminium, baja, emas dan perak. Dari kelima bahan tersebut tembaga merupakan penghantar yang paling banyak, digunakan karena mempunyai daya hantaryang baik.
2.3.2 Prinsip Kerja Sensor Cahaya LDR (Light Dependent Resistor) Resistansi Sensor Cahaya LDR (Light Dependent Resistor) akan berubah seiring den-gan perubahan intensitas cahaya yang mengenainya atau yang ada disekitarnya. Dalam keadaan gelap resistansi LDR seki-tar 10MΩ dan dalam keadaan terang sebe-sar 1KΩ atau kurang. LDR terbuat dari ba-han semikonduktor seperti kadmium sul-fida. Dengan bahan ini energi dari cahaya yang jatuh menyebabkan lebih banyak mua-tan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan telah men-galami penurunan.
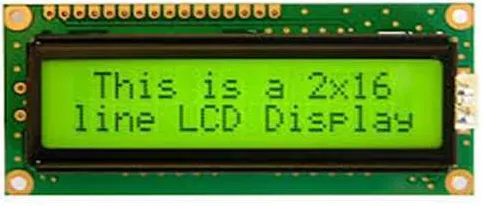
2.4. LCD ( Liquid Crystal Display )
LCD ( Liquid Crystal Dispalay ) sering diartikan dalam bahasa indonesia sebagai tampilan kristal cair merupakan suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama.
satu buah kristal cair sebagai sebuah titik cahaya. Walau disebut sebagai titik cahaya namun kristal cair ini tidak memancarkan cahaya sendiri. Sumber cahaya didalam sebuah perangkat LCD adalah lampu neon berwarna putih dibagian belakang susunan kristal cair tadi. Titik cahaya yang jumlahnya puluhan ribu bahkan jutaan inilah yang membentuk tampilan citra. Kutub kristal cair yang dilewati arus listrik akan berubah karena pengaruh polarisasi medan magnetik yang timbul dan oleh karenanya akan hanya membiarkan beberapa warna diteruskan sedangkan warna lainnya tersaring.
Gambar 2.7.LCD 16 x 2
Modul LCD memiliki karakteristik sebagai berikut:
1. Terdapat 16 x 2 karakter huruf yang bisa ditampilkan. 2. Setiap terdiri dari 5 x 7 dot-matrix cursor.
3. Terdapat 192 macam karakter.
4. Terdapat 80 x 8 bit display RAM ( maksimal 80 karakter ).
5. Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit. 6. Dibangun oleh osilator lokal.
7. Satu sumber tegangan 5 Volt.
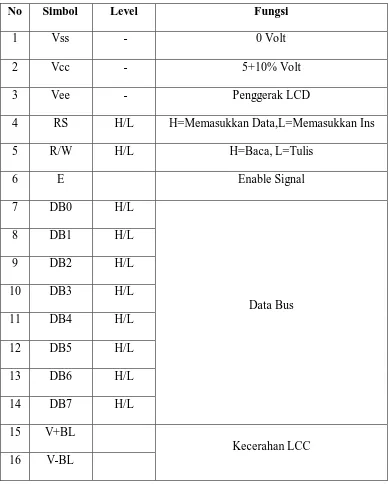
2.4.1. Konfigurasi Pin LCD
4 RS H/L H=Memasukkan Data,L=Memasukkan Ins
2.5Motor DC
Berdasarkan pengertiannya motor dc adalah motor listrik yang dialiri sumber arus searah pada kumparan medan untuk menjadikannya energi mekanik.Hampir sama dengan motor AC, kumpara nmedan yang bergerak disebut stator dan untuk kumparan jangkar disebut juga rotor.
Gambar 2.8.Motor DC
Motor DC memiliki 3 bagian utama untuk berputar antara lain:
• Current elektromagnet atau biasa disebut dinamo. Dinamo silinder terhubung
ke as untuk menggerakkan beban. Untuk kasus motor DC kecil kutub utara dan selatan berganti lokasi saat dinamo berputar.
• Kutub medan. Terbagi menjadi dua yaitu kutub utara dan kutub selatan.
• Commutator. Fungsi komponen ini untuk mentransmisikan arus antara dinamo
dan sumber daya.
• Mengubah tegangan dinamo. Bila dinaikan maka akan menigkatkan kecepatan
sedangkan bila diturunkan maka akan menurunkan kecepatan.
• Mengubah arus medan. Kenaikan arus medan sebanding dengan kenaikan
kecepatan.
Hubungan kecepatan,flux medan dan tegangan dinamo:
• Persamaan gaya elektromagnetik: E = K Φ N
• Persamaan Torque: T= K Φ Ia
Keterangan:
• E : gaya elektormagnetik yang dikembangkan pada terminal dinamo
• Φ : flux medan berbanding lurus dengan arus medan.
• N : kecepatan dalam RPM.
• T : torque elektromagnetik.
• Ia : arus dinamo
• K : konstanta
Berdasarkan jenis sumber dayanya dibagi menjadi 2 yaitu:
• Motor DC dengan sumber daya terpisah.
• Motor DC sumber daya sendiri.
Untuk Motor DC sumber daya sendiri terbagi menjadi 3 yaitu:
• Motor DC tipe Seri
• Motor DC tipe gabungan.
• Motor DC tipe Shunt.
2.5.1 Prinsip Mesin DC
Menggunakan prinsip hukum Faraday dan gaya Lorentz.
1. Beroperasi sebagai motor.
Beban mekanik dihubungkan dengan batang bergerak.Kemudian batang melambat perlahan dan menghasilkan pengurangan Tegangan terindukasi. Arus searah jarum jam sirkuit menghasilkan gaya induksi magnetic ke kanan. Sistem teresbut bergerak dalam kecepatan konstan.
2. Beroperasi sebagai generator.
Asumsikan batang dalam kecepatan konstan dan arus nol. Kemudian,gaya teraplikasi menarik batang lebih cepat ke kanan, kecepatan batang meningkat,tegangan yang terinduksi melampaui sumber tegangan, dan arus bersirkulasi melawan arah jarum jam.Karena arus memiliki arus terbalik, gaya terinduksi batang di medan berkebalikan dan berada di kiri. Kecepatan batang menstabilkan dengan menarik gaya sama dengan gaya terinduksi. Kemudian,tegangan terinduksi mengirimkan daya sebagian ke resistansi dan sisanya ke baterai. Lalu, energy mekanik berubah menjadi energy listrik dan muncul sebagai loss di resistansi atau energy kimia tersimpan dalam baterai.
2.6 Sensor Air Hujan
membuat jemuran, yang mana pada jemuran tersebut akan secara otomatis menutup pada saat hujan turun.Berikut ini akan dijelaskan prinsip kerja dari pada sensor hujan di atas.Pada rankaian panel sensor yang ditandai dengan sensor. panel sensor hujan ini akan dipasang di area terbuka, dimana air hujan akan mengenai board panel tersebut. panel ini terbuat dari board PCB biasa yang dibuat menjadi sebuah rangkaian seperti yang ada di atas. Untuk menghindari karat karena air hujan sebaiknya tembaga dilapisi oleh timah.
Prinsip kerja dari rangkaian ini adalah, dimana pada saat air hujan mengenai panel sensor, maka akan terjadi proses elektrolisasi oleh air hujan tersebut karena air hujan termasuk kedalam cairan elektrolit yaitu cairan yang dapat menghantarkan arus listrik,meskipun sangat kecil dan proses ini akan menyebabkan keadaan aktif yang akan mengaktifkan relay . Dimana pada saat relay aktif motor akan menarik penutup dan setelah penutup ditarik ke pangkal ujung maka motor akan berhenti secara otomatis. Hal ini terjadi karena pada saat penutup berada di pangkal ujung magnet akan mengenai sensor magnet yang ada di pangkal ujung mengalir ke motor akan terhenti dapat dilihat pada panel sensor pada Gambar 2.9.
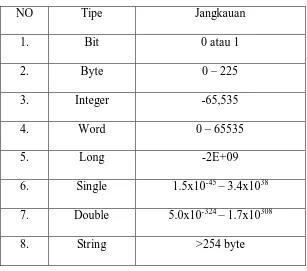
2.6. 1 Tipe Data
Tipe data merupakan bagian program yang penting karena tipe data mempengaruhi setiap instruksi yang akan dilaksanakan komputer. Pemilihan tipe data yang tepat akan membuat operasi data menjadi lebih efesien dan efektif.
Tabel 2.2. Tipe-Tipe Data Dalam BASCOM-AVR
NO Tipe Jangkauan
1. Bit 0 atau 1
2. Byte 0 – 225
3. Integer -65,535
4. Word 0 – 65535
5. Long -2E+09
6. Single 1.5x10-45 – 3.4x1038
7. Double 5.0x10-324 – 1.7x10308 8. String >254 byte
2.6.2. Variabel
• Terdiri dari gabungan huruf dan angka dengan karakter pertama harus
berupa huruf.
• Tidak boleh mengandung karakter spasi.
• Tidak boleh mengandung symbol-symbol khusus, kecuali garis bawah
(underscore). Yang termasuk symbol khusus yang tidak boleh digunakan
adalah $ ? % # ! & * , ( ) - + = @.
• Panjang sebuaah nama variabel hanya 32 karakter.
Untuk dapat menggunakan variabel, maka variabel tersebut harus dideklarasikan terlebih dahulu pada program yang dibuat. Berikut ini merupakan cara mendeklarasikan variabel pada BASCOM-AVR.
2.6. 3 Operasi – Operasi dalam BASCOM - AVR
Bahasa pemograman BASCOM – AVR ini dapat digunakan untuk menggabungkan, membandingkan, atau mendapatkan informasi tentang sebuah pernyataan dengan menggunakan operator-operator yang tersedia di BASCOM-AVR.
• Operator aritmatika
Operator ini adalah operator yang digunakan dalam perhitungan operator aritmatika meliputi + (tambah), - (kurang), / (bagi), dan * (kali).
• Operator Relasi
Tabel 2.3.Tabel Operasi Relasi
Opertor Relasi Pernyataan
= Sama Dengan X = Y
<> Tidak Sama Dengan X <> Y
< Lebih Kecil Dari X < Y
> Lebih Besar Dari X > Y
<= Lebih Kecil Sama Dengan X <= Y
>= Lebih Besar Sama Dengan X >= Y
• Operator Logika
Operator logika digunakan untuk menguji sebuah kondisi atau memanipulasi bit dan bolean. Dalam BASCOM-AVR ada 4 buah operator logika, yaitu AND, OR, NOT, dan XOR.
• Operator fungsi
2.7. Komponen Elektronika 2.7.1. Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian. Sesuai dengan namanya resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Tipe resistor yang umum berbentuk tabung porselen kecil dengan dua kaki tembaga dikiri dan kanan. Pada badannya terdapat lingkaran membentuk gelang kode warna untuk memudahkan pemakai mengenali besar resistansi tanpa mengukur besarnya dengan ohm meter. Kode warna tersebut adalah standar menufaktur yangdikeluarkan oleh ELA (Electronic Industries Association) pada Gambar 2.10.
Gambar 2.10. Resistor Karbon 2.7.2. Kapasitor
menuju ujung kutup negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutup positif karena terpisah oleh bahan elektrik yang non-konduktif.Muatan elektrik ini “tersimpan” selama tidak ada konduktif pada ujung- ujung kakinya.
Kapasitor merupakan komponen pasif elektronika yang sering dipakai didalam merancang suatu sistem yang berfungsi untuk mengeblok arus DC, Filter, dan penyimpan energi listrik. Didalamnya 2 buah pelat elektroda yang saling berhadapan dan dipisahkan oleh sebuah insulator. Sedangkan bahan yang digunakan sebagai insulator dinamakan dielektrik. Ketika kapasitor diberikan tegangan DC maka energy listrik disimpan pada tiap elektrodanya. Selama kapasitor melakukan pengisian, arus mengalir. Aliran arus tersebut akan berhenti bila kapasitor telah penuh. Yang membedakan tiap - tiap kapasitor adalah dielektriknya. Berikut ini adalah jenis– jenis kapasitor yang dipergunakan dalam perancangan ini.
2.7.3 Elektrolik Kapasitor (ELCO)
Misalnya kapasitor akan diberikan catu daya dengan tegangan 5 Volt, berarti kapasitor yang dipilih harus memiliki tegangan kerja minimum 2 x 5 = 10 Volt .
Gambar 2.11.Elektrolik Kapasitor
2.7.4 IC Regulator 7805
IC 7805 (kadang-kadang L78xx, LM78xx, MC78xx ...) adalah keluarga IC regulator tegangan . Keluarga 7805 umumnya digunakan dalam sirkuit elektronik yang membutuhkan power supply yang diatur karena kemudahan penggunaan dan biaya rendah. Untuk IC ini, xx diganti dengan dua digit, yang menunjukkan output tegangan (misalnya, 7805 memiliki output 5 volt, sedangkan 7812 memproduksi 12 volt). 78xx adalah kode regulator yang bekerja pada tegangan positif: artinya mereka menghasilkan tegangan out put positif. Sedangkan Lawannya adalah 79XX yang menghasilkan Out put negatif. 78xx dan IC 79XX dapat digunakan dalam kombinasi untuk menyediakan pasokan tegangan positif dan negatif di sirkuit yang sama.
positif untuk seri 79xx, dan kaki ketiga sebagai outputnya. IC ini mendukung tegangan input berapa saja di atas tegangan output yang diinginkan, sampai maksimum 35 sampai 40 volt tergantung pada merek, dan biasanya outputnya 1 atau 1,5 ampere (meskipun paket yang lebih kecil atau lebih besar mungkin memiliki Peringkat yang lebih rendah atau lebih tinggi saat ini).
Gambar 2.12. Bentuk umum IC 7805
Keuntungan
1. 7805 tidak memerlukan komponen tambahan untuk bekerja, sumber diatur bebas, membuat mereka mudah digunakan, serta penggunaan ekonomis dan efisiensi ruang.
2. Regulator tegangan lainnya mungkin memerlukan komponen tambahan untuk mengatur tingkat tegangan keluaran, atau untuk membantu dalam proses regulasi.
3. Beberapa desain lain (seperti power supply switched-mode ) mungkin
perlu keahlian teknik substansial untuk bekerja.
5. Dalam beberapa kasus, fitur pembatas arus dari perangkat 7805 dapat memberikan perlindungan tidak hanya untuk 7805 itu sendiri, tetapi juga untuk bagian lain dari sirkuit.
Kekurangan
1. Tegangan input harus selalu lebih tinggi dari tegangan output dengan beberapa jumlah minimum (biasanya 2 volt). Hal ini dapat membuat perangkat ini cocok untuk menyalakan beberapa perangkat dari beberapa jenis sumber daya (misalnya, menyalakan sebuah sirkuit yang membutuhkan 5 volt dengan sumber 6-volt baterai maka tidak akan bekerja menggunakan 7805).
2. Ketika mereka didasarkan pada regulator linier desain, arus masukan yang dibutuhkan adalah selalu sama dengan arus keluaran. Sebagai tegangan input harus selalu lebih tinggi dari tegangan output, ini berarti bahwa daya total (tegangan dikalikan dengan arus) masuk ke 78xx akan lebih dari daya keluaran yang disediakan. Input daya tambahan hilang sebagai panas. Ini berarti baik untuk beberapa aplikasi yang memadai, heatsink harus disediakan, dan juga bahwa sebagian dari daya input terbuang selama proses, membuat mereka kurang efisien daripada beberapa power supply jenis lainnya.
3. Ketika tegangan input secara signifikan lebih tinggi dari tegangan
2.7.5. Relay
Relay adalah sebuah alat elektromagnetik yang dapat mengubah kontak-kontak saklar sewaktu alat ini menerima sinyal listrik. Sebuah relay terdiri dari satu kumparan dan inti, yang mana bila dialiri arus kumparan tersebut akan menjadi magnet dan menutup atau membuka kontak-kontak. Kontak-kontaknya ada dua macam, yaitu NO (Normally Open) dan NC (Normally Close).Normally Close adalah kontak relay yang terhubung saat belum ada arus. Sewaktu ada arus yang melewati kumparan relay, inti besi lunak akan dimagnetisasi, dan menarik kontak sehingga kontak yang open kini terhubung. Keuntungan dari relay ini adalah dapat menghubungkan daya yang besar dengan memberi daya yang kecil pada kumparannya.
Gambar 2.13 Relay
2.7.6. Diode
menggunakan dua lempeng bahan semikonduktor tipe P dan tipe N. Simbol dan salah satu bentuk fisik dioda dapat dilihat pada gambar berikut.
Gambar 2.14. Diode
Dioda memiliki 2 kaki yaitu kaki Anoda dan Kaki Katoda, pada prinsipnya dioda akan mengalirkan arus DC dari Anoda ke Katoda. Pada aplikasi lain dioda dapat berfungsi sebagai penyearah gelombang AC.
2.7.6 Saklar
Saklar adalah komponen elektronika yang bekerja sebagai pemutus atau pemilih sinyal secara mekanik. Saklar memiliki dua bagian utama yaitu kontaktor dan tuas saklar.Salah satu bentuk dan simbol saklar dapat dilihat pada gambarberikut.
Gambar 2.15. Saklar
BAB 3
PEMBUATAN DAN PERANCANGAN 3.1. Gambar Rangkaian Lengkap
Adapun gambar rangkaian lengkap dari dari perancangan alat yang dibuat adalah sebagai berikut.
3.1.1. Diagram Blok Rangkaian
Adapun gambar diagram blok dari dari perancangan alat yang dibuat adalah sebagai berikut
3.1.2. Fungsi Tiap Blok
1. Blok mikrokontroller : Mengkonversi data dari sensor LDR dan Hujan
2. Blok LDR : Sebagai Inputan / Pendeteksi Cahaya 3. Blok Sensor Hujan :Sebagi Inputan adanya air 4. Blok LCD : Sebagai output tampilan
5. Blok Lampu Pijar : Sebagai pemanas/pengering dalam Boks 6. Motor DC :Sebagai Pengerak Otomatisasi
7. Blok power supply : Sebagai penyedia tegangan ke system dan
Sensor
3.2. Rancangan Perangkat Keras 3.2.1. Rangkaian Catu Daya
Gambar 3.3. Rangkaian Catu Daya
pada rangkaian tersebut sumber tegangan yang digunakan adalah dari tegangan PLN, sehingga digunakan sebuah transformator untuk menurunkan tegangan dari 220V menjadi 9V. Setelah tegangan diturunkan, tegangan tersebut kemudian disearahkan oleh sebuah dioda. Kapasitor berfungsi sebagai filter sehingga tegangan DC yang dihasilkan dioda mempunyai ripple tegangan yang kecil. Tegangan tersbut kemudian di regulasi oleh regulator LM7805 sehingga tegangan output dari rangkaian ini akan stabil pada 5V. Tegangan inilah yang digunakan untuk mensupply rangkaian pada alat yang dirancang.
3.2.2.Rangkaian Sensor LDR
Gambar 3.4.Rangkaian Sensor LDR
3.2.4.Rangkaian Mikrokontroler ATMega8
Gambar 3.5.Rangkaian Mikrokontroler ATMega8
3.2.5.Rangkaian LCD Karakter 16x2
Berikut ini merupakan rangkaian yang digunakan untuk mengoperasikan LCD karakter 16x2.
Gambar 3.6.Rangkaian LCD Karakter 16x2
3.2.6.Rangkaian Tombol / Tactile Switch
Gambar 3.7.Rangkaian Tombol / Tactile Switch
Rangkaian ini merupakan sarana input logika digital bagi mikrokontroler. Dari rangkaian dapat dilihat bahwa ketika sakelar tidak tekan, semua pin pada SL1 akan tetap bertegangan 5V (logika 1). Ketika salah satu sakelar ditekan, maka outputnya menjadi 0V (berlogika 0).
3.2.6.Rangkaian Driver Motor DC L293D
Gambar 3.8.Rangkaian Driver Motor DC L293D
3.2.7.Rangkaian Sensor Air
3.2.8.Rangkaian Relay
Gambar 3.10. Rangkaian Relay
3.3.Flowchart Alat Pengering kopi otomatis
Bahasa pemrograman yang digunakan pada perancangan alat ini adalah bahasa pemrograman BASCOM-AVR. Pada Gambar 3.13 ini adalah listing program yang di isi pada mikrokontroler Atmega 8 pada Tugas Akhir ini.
BAB 4
PROGRAM DAN PEMBAHASAN SISTEM
4.1. Program Pada Rangkaian Mikrokontroler ATMega8
Gambar 4.2. Rangkaian Mikrokontroler ATMega8
mikrokontroler terdiri dari beberapa modul yang di gunakan sebagai input dan output, sebagai pengendali utama atau proses yang akan digunakan untuk mengendalikan alat.Pengujian pada rangkaian ini dilakukan dengan cara
mengisikan program sederhana kedalam mikrokontrolernya. Kemudian, diamati apakah rangkaian dapat beerja sesuai dengan perintah program yang diisikan kedalam mikrokontroler tadi.
Pada alat ini, rangkaian mikrokontroler diuji dengan cara memasukkan program sederhana yang bila diaktifkan akan membuat LED yang terhubung ke mikrokontroler akan berkedip. Berikut listing programnya:
$regfile = "m8pdef.dat" terhubung pada mikrokontroler akan tampak berkedip terus menerus dengan jeda waktu tertentu.
program yang digunakan untuk menjalankan sensor yang menghubungkan sensor dengan mikrokontroller adalah sebagai berikut:
Auto:
Modealat = 1
Dataadc = Getadc(5)
If Dataadc > Dataset And Sensor_air = 1 Then 'Cuaca Cerah
Gosub Buka
End If
If Dataadc <= Dataset And Sensor_air = 0 Then 'Mendung Hujan
Gosub Tutup
End If
If Dataadc <= Dataset And Sensor_air = 1 Then 'Mendung tidak hujan
Gosub Tutup
End If
If Dataadc > Dataset And Sensor_air = 0 Then 'Cerah hujan
Gosub Tutup
End If
Gosub Update
4.3.Program Pada Rangkaian Relay
Gambar 4.4. Rangkaian Relay
Adapun Program yang digunakan untuk menghubungkan mikrokontroler dengan relay untuk menggerakkan motor dan garasi adalah sebagai berikut:
Disable Int0
Disable Interrupts
Modealat = 0
Do
If Tbl1 = 0 Then
Toggle Com_pintu
Waitms 20
End If
If Tbl3 = 0 Then
Toggle Com_relay
Waitms 20
End If
If Com_pintu = 1 Then
Gosub Buka
Else
Gosub Tutup
If Com_relay = 1 Then
Set Lampu
Else
Reset Lampu
End If
Gosub Update
Waitms 100
Loop Until Tbl2 = 0
Waitms 150
Enable Int0
Enable Interrupts
Return
Rangkaian LCD diuji dengan cara menghubungkannya dengan mikrokontroler seperti pada gambar diatas. Kemudian pada mikrokontroler diinputkan program sebagai berikut:
$regfile = "m8pdef.dat"
$crystal = 11059200
Config Lcdpin = Pin , Db4 = Portb.0 , Db5 = Portd.7 ,
Db6 = Portd.6 , Db7 = Portd.5 , Rs = Portb.2 , E =
Portb.1
Config Lcd = 16 * 2
Cursor Off
Cls
Do
Lcd "Test "
Loop
4.5. Program Pada Rangkaian Sensor Air Hujan yang Terhubung dengan Mikrokontroler ATMega 8.
Rangkaian sensor air ini diuji dengan cara mengukur tergangan pada titik-titik test point sesuai dengan gambar berikut ini:
Gambar 4.7. Rangkaian Sensor Air Hujan
Adapun program yang digunakan untuk menghubungkan sensor air hujan dengan mikrokontroler untuk menjalankan motor dan garasi dan ditampilkan pada LCD adalah:
Update:
Dataadc = Getadc(5)
Locate 1 , 6
Lcd " "
Locate 1 , 7
If Modealat = 1 Then
Lcd "A"
Else
Lcd "M"
End If
Locate 1 , 16
Lcd " "
Locate 1 , 16
If Posisi = 1 Then
Lcd "O"
Else
Lcd "C"
End If
Locate 2 , 6
Locate 2 , 6
Lcd Dataadc
Locate 2 , 16
Lcd " "
Locate 2 , 16
Lcd Sensor_air
Return
Tampilan:
Locate 1 , 1
Lcd " "
Locate 1 , 1
Lcd "Mode: Door: "
Locate 2 , 1
Lcd " "
Locate 2 , 1
Lcd "ADC : Air : "
4.6. Program Lengkap Perancangan Prototype Alat Pengering Kopi Otomatis Berbasis ATMega 8.
Progam BASCOM AVR:
$regfile = "m8def.dat"
$crystal = 16000000
Config Lcd = 16x2
Config Lcdpin = Pin , Db4 = Portc.2 , Db5 = Portc.1 , Db6 = Portc.0 , Db7 = Portb.2
, E = Portc.3 , Rs = Portc.4
Cursor Off
Config Adc = Free , Prescaler = Auto , Reference = Avcc
Start Adc
Tbl1 Alias Pind.0
Tbl2 Alias Pind.1
Tbl3 Alias Pind.2
Sensor_air Alias Pind.3
Limbuka Alias Pind.4
M1 Alias Portd.6
M2 Alias Portd.7
V Alias Portd.5
Lampu Alias Portb.0
Dim Dataadc As Word
Dim Dataset As Word
Dim Modealat As Bit
Dim Posisi As Bit
Dim Air As Bit
Dim Com_pintu As Bit
Dim Com_relay As Bit
Enable Int0
Enable Interrupts
On Int0 Setting_mode
Dataset = 500
Set Com_pintu
Gosub Buka
Awal:
Cls
Gosub Tampilan
Do
Gosub Auto
If Tbl2 = 0 Then
Waitms 150
Gosub Manual
End If
Waitus 20
Loop
Auto:
Modealat = 1
Dataadc = Getadc(5)
If Dataadc > Dataset And Sensor_air = 1 Then 'Cuaca Cerah
Gosub Buka
If Dataadc <= Dataset And Sensor_air = 0 Then 'Mendung Hujan
Gosub Tutup
End If
If Dataadc <= Dataset And Sensor_air = 1 Then 'Mendung tidak hujan
Gosub Tutup
End If
If Dataadc > Dataset And Sensor_air = 0 Then 'Cerah hujan
Gosub Tutup
End If
Gosub Update
Return
Update:
Air = Sensor_air
Dataadc = Getadc(5)
Locate 1 , 6
Lcd " "
Locate 1 , 7
If Modealat = 1 Then
Lcd "A"
Lcd "M"
End If
Locate 1 , 16
Lcd " "
Locate 1 , 16
If Posisi = 1 Then
Lcd "O"
Else
Lcd "C"
End If
Locate 2 , 6
Lcd " "
Locate 2 , 6
Lcd Dataadc
Locate 2 , 16
Lcd " "
Locate 2 , 16
Return
Tampilan:
Locate 1 , 1
Lcd " "
Locate 1 , 1
Lcd "Mode: Door: "
Locate 2 , 1
Lcd " "
Locate 2 , 1
Lcd "ADC : Air : "
Return
Buka:
Posisi = 1
If Limbuka = 1 Then
Do
Gosub Update
Set M1
Reset M2
Waitms 50
Loop Until Limbuka = 0
End If
Reset Lampu
Reset M1
Reset M2
Reset V
Return
Tutup:
Posisi = 0
If Limtutup = 1 Then
Do
Gosub Update
Reset M1
Set M2
Toggle V
Waitms 50
Loop Until Limtutup = 0
End If
Reset M1
Reset M2
Reset V
Return
Setting_mode:
Disable Int0
Disable Interrupts
Waitms 150
Cls
Locate 1 , 1
Lcd " Setting Data "
Waitms 500
Cls
Locate 1 , 1
Lcd "ADC: "
Locate 2 , 1
Do
Dataadc = Getadc(5)
If Tbl1 = 0 Then
Incr Dataset
Waitms 80
End If
If Tbl2 = 0 Then
Decr Dataset
Waitms 80
End If
Locate 1 , 5
Lcd " "
Locate 1 , 5
Lcd Dataadc
Locate 2 , 5
Lcd " "
Locate 2 , 5
Lcd Dataset
Waitms 80
Waitms 150
Enable Int0
Enable Interrupts
Goto Awal
Return
Manual:
Disable Int0
Disable Interrupts
Modealat = 0
Do
If Tbl1 = 0 Then
Toggle Com_pintu
Waitms 20
End If
If Tbl3 = 0 Then
Toggle Com_relay
Waitms 20
If Com_pintu = 1 Then
Gosub Buka
Else
Gosub Tutup
End If
If Com_relay = 1 Then
Set Lampu
Else
Reset Lampu
End If
Gosub Update
Waitms 100
Loop Until Tbl2 = 0
Waitms 150
Enable Int0
Enable Interrupts
BAB 5
KESIMPULAN DAN SARAN
5.1. KESIMPULAN
Setelah melakukan tahap perancangan dan pembuatan sistem yang kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut :
1. Mikrokontroller merupakan pengolah data program yang diinputkan ke seluruh rangkaian dengan perintah yang sudah di setting masing-masing pada rangkaian..
2. Program yang dimasukkan ke dalam mikrokontroler ATMega 8 akan menjalankan sistem dan program yang telah dimasukkan bekerja dengan baik sesuai dengan kinerja alat tersebut.
3. Program yang diinputkan ke dalam mikrokontroler akan menjalankan perintah pada setiap rangkaian sehingga seluruh rangkaian dapat mengoperasikan alat dan menampilkan pada LCD.
5.2. SARAN
1. Diperlukan ketelitian dalam menginputkan program pada mikrokontroller, supaya alat benar-benar bisa di fungsikan.
2. Software yang digunakan adalah software BASIC COMPILER-AVR,berbeda dengan software lainnya.
DAFTAR PUSTAKA
Pitawarno, Endra. 2005. Mikroprosesor dan Interfacing. Erlangga : Jakarta Agfianto . 2002 . Teknik Antarmuka Komputer . Erlangga : Jakarta.
Daryanto, Drs. 2008. Pengetahuan Teknik Elektronika. Jakarta : Bumi aksara Setiawan,Afrie.2006. 20 aplikasi mikrokontroller ATMEGA8535 &
ATMEGA 16 menggunakan BASCOM -AVR . Yogyakarta: ANDI. Putra eko afgianto.2002.Teknik Antar Muka Komputer: Konsep dan Aplikasi
Yogyakarta: Graha ilmu.
Bejo, A. 2008. C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega8535, Edisi I. Yogyakarta : Graha Ilmu
Catur Edi Widodo & Retna Prasetia. 2004. Teori dan Praktek Interfacing Port Serial Komputer dengan VisualBasic 6.0. Yogyakarta: Andi.
https://kampungmultimedia.wordpress.com/2013/05/06/pengertian-code-vision-avr/
diakses bulan maret 2015
https://teundiksha.files.wordpress.com/2010/04/sekilas20codevisionavr.pdf
diakses bulan maret 2015
http://xcontohmakalah.blogspot.com/2014/02/pengertian-codevisionavr.html