KERJA PRAKTEK
Disusun Oleh :
Jimmy Rosandy ( 07.41020.0015 )
SEKOLAH TINGGI
MANAJEMEN INFORMATIKA DAN TEKNIK KOMPUTER
SURABAYA
i
ABSTRAKSI
Di tengah – tengah kemajuan teknologi, elektronik tampaknya memiliki perkembangan yang sangat pesat dan menjadikan kehidupan teknologi benar – benar sebuah dunia sendiri yang terkait dengan dunia nyata dalam kehidupan sehari – hari.
v
1.5 Ruang Lingkup Kerja Praktek ...……… 4
1.6 Metode Penelitian ..……….. 4
1.7 Sistematika Penulisan ...……… 5
BAB II GAMBARAN UMUM PT. CITRA MANDALASAMUDRA 2.1 Sejarah Singkat PT. Citra Mandalasamudra ……….. 7
2.2 Visi, Misi dan Komitmen PT. Citra Mandalasamudra ...……….. 9
BAB III LANDASAN TEORI 3.1 Microcontroller ATMega8 ………. 11
3.1.1 Arsitektur Microcontroller ATMega8 ………18
3.1.2 Fitur ………... 18
vi
BAB IV HASIL KERJA PRAKTEK 4.1 Merancang Rangkaian Remote Control ………. 29
4.1.1 Transmitter ……… 29
4.1.2 Receiver ………. 31
4.2 Merancang Driver Motor ……… 33
4.3 Minimum Sistem ATMega8 ……… 36
4.4 Pembuatan Program ……… 37
4.4.1 Pengenalan CodeVision AVR ……… 38
4.4.2 Cara Pengoperasian Aplikasi ………. 39
4.5 Tahap Penggabungan Antar Hasil Kerja ……… 43
vii
viii
Daftar Gambar
Halaman
Gambar 1.1 Susunan Pin Microcontroller ATMega8 ………. 12
ix
Daftar Lampiran
1 BAB I PENDAHULUAN
1.1 Latar Belakang
Pesatnya kemajuan teknologi informasi yang didukung oleh perangkat computer yang memungkinkan sebuah peralatan yang mudah digunaka yang berfungsi untuk membantu manusia agar mempermudah pekerjaan yang selama ini mungkin sangat memberatkan. Banyak dari sekarang ini ingin mewujudkan sebuah rumah yang berkonsep serba otomatis. Dari sini tercetus ide bagaimana membuat sebuah pagar yang dapat membuka dan menutup secara otomatis agar kita tidak repot untuk membuka dan menutupnya.
Kerja Praktek adalah kesempatan bekerja di dunia nyata untuk memperoleh pengalaman kerja, sehingga dapat mengenal dunia kerja, dan dapat menerapkan dan membandingkan teori yang diperoleh selama kuliah dengan dunia kerja. Selain itu kerja praktek juga merupakan bagian dari kurikulum Sekolah Tinggi Manajemen Informatika dan Sistem Informasi ( STIKOM ) Surabaya sebagai salah satu persyaratan untuk menempuh ujian akhir.
Prosedur kerja praktek telah di atur sesuai dengan pedoman yang telah ditetapkan, yaitu harus mendapatkan persetujuan dari instalasi atau dari perusahaan tempat melaksanakan kerja praktek tersebut.
Dengan adanya program kerja praktek ini dapat diharapkan dapat tercapainya suatu pengembangan dan penerapan kemampuan dan tanggap terhadap kenyataan yang ada dilapangan atau masyarakat. Sasaran kerja praktek ini adalah untuk menerapkan ilmu yang didapat dari bangku kuliah pada perusahaan yang ditempati. Dan bila memungkinkan dapat meningkatkan system yang diterapkan di peruhasaan tersebut.
1.2 Tujuan Kerja Praktek
3
1. Mahasiswa mampu memahami dan melaksanakan berbagai prosedur dalam berkerja di perusahaan, mulai dari proses lamaran, pengerjaan dan akhir dari pelaksanaan kerja praktek.
2. Mahasiswa mampu menerapkan pengetahuan yang diperolehnya dalam kerja
praktek.
3. Mahasiswa mampu bersikap professional dalam berkerja di perusahaan, seperti sikap disiplin, kreatif dan bertanggung jawab.
1.3 Pembatasan Masalah
Untuk membatasi kajian masalah dalam penulisan laporan maupun pelaksanaan praktek kerja ini maka pembahasan masalah mengacu pada beberapa batasan sebagai berikut :
1. Microcontroller yang digunakan adalah ATMega8.
2. Aplikasi yang digunakan untuk implementasi program yang akan penulis load kedalam Microcontroller ATMega8 adalah AVR.
3. Untuk remote otomatis menggunakan Infra Red ( IR ) yang terhubung dengan Ic TC9148 sebagai penerima ( Receiver ) dan Ic TC9149 sebagai pengirim (Transmiter).
1.4
Waktu dan lama Kerja Praktek
1.5 Ruang Lingkup Kerja Praktek
Sasaran kerja praktek tersebut adalah agar mahasiswa mendapatkan pengalaman belajar melalui pengamatan di bidang elektronika :
a. Instalasi microcontroller
b. Mengload program kedalam microcontroller c. Merangkai rangkaian elektronika remote control
1.6 Metodologi Penelitian
Untuk menyelesaikan permasalahan yang dihadapi oleh penulis, maka penulis mendapatkan bimbingan langsung dari pengajar STIKOM Surabaya yang memiliki kemampuan di dalam elektronika. Dari praktek tersebut penulis mendapat gambaran bahwa desain elektronika yang akan penulis buat, sudah di rancang sedemikian rupa agar mampu mengkasilkan seperti apa yang di inginkan. Teknik dan metode yang kami lakukan adalah sebagai berikut :
1. Perancangan, yaitu membagun rangkaian remote control yang sesuai di harapkan. 2. Penanganan langsung terhadap permasalahan yang terjadi dan mencari solusi
bagaimana cara menanganinya, sehingga system dalam rangkaian remote control bias berjalan sesuai dengan baik.
3. Studi yang akan digunakan adalah literatur atau pustaka melalui membaca buku-buku yang berhubungan dengan elektronika dan pemogramannya.
5
5. Penulis dan penyusun laporan dari pelaksanaan kerja praktek yang telah dilakukan sebagai bentuk tanggung jawab kepada pihak STIKOM Surabaya.
1.7 Sistematis Penulisan
Sistematis dalam penulisan laporan hasil kerja praktek lapangan pada PT. CITRA MANDALASAMUDRA adalah sebagai berikut :
BAB I Pendahuluan
Pada bab ini merupakan tentang latar belakang, rumusan masalah, batasan masalah, tujuan, dan sistematika penulisan laporan.
BAB II Gambaran umum perusahaan
Pada bab ini menguraikan tentang gambaran umum perusahaan diantara riwayat dan institusi perusahaan serta struktur organisasi perusahaan.
BAB III Landasan teori
Pada bab ini menguraikan tentang teori-teori yang mendukung penyelesaian laporan ini diantaranya menguraikan teori-teori elektronika dan pemograman microcontroller.
BAB IV Hasil Kerja Praktek
BAB V Kesimpulan
7 BAB II
GAMBARAN UMUM PT. CITRA MANDALASAMUDRA
2.1 Sejarah Singkat PT. CITRA MANDALASAMUDRA
Di tengah kesibukan derap Pembangunan Nasional, kedudukan teknologi semakin penting. Hasil dari suatu pembangunan sangat penting ditentukan oleh materi perkembngan teknologi yang dimiliki oleh suatu negara. Cepat atau lambatnya laju pembangunan ditentukan pula oleh kecepatan memperoleh ilmu dari perkembangan teknologi itu tersebut. Adanya suatu teknologi yang bersifat elektronik memudahkan kita untuk membuat suatu terobosan-terobosan terbaru untuk mensejahterakan masyarakat luas. Keperluan merancang suatu rangkaian elektronika tidak perna lepas dari kehidupan kita selama. Muncul suatunya inovasi baru memungkinkan kita untuk melangkah lebih maju untuk melakukan produk baru yang berfungsi mensejahterakan masyarakat untuk menggunakannya.
Atas dasar pemikiran inilah, maka PT. CITRA MANDALASAMUDRA di dirikan pada tanggal 23 April 2001 No.C-5562.HT.01.01.2001. Tokoh yang berperan besar atas berdirinya perusahaan tersebut adalah :
1. Sugeng Santoso
2. Hadi Poerwanto
3. Doedit Heroistijanto
4. Dra. Noenis Trilupi Andini
Dengan maksud untuk mencapai suatu tujuan tersebut disinilah PT. CITRA MANDALA SAMUDRA mengelola usaha dengan membangun suatu
komplek perumahan, pertokoan, perkantoran, dan pergudangan, beserta sarana-sarana penunjangnya. Didalam bidang perdagangan umum perusahaan di atas mempunyai sarana usaha yang lain yaitu keagenan, distributor, komisioner, supplier, ekspor/impor dari barang yang dapat diperdagangkan.
9
2.2 Visi, Misi dan Komitmen PT. CITRA MANDALASAMUDRA
A. Visi dan Misi Perusahaan
Visi dan Misi Perusahaan telah kami bangun bersama, dan siap untuk kami operasionalisasikan. Setiap langkah, kami akan selalu menerapkan nilai-nilai yang juga telah kami kembangkan bersama.
NILAI-NILAI KAMI adalah :
Jujur, baik kepada diri sendiri maupun kepada orang lain
Adil : merupakan nilai yang mendasari langkah menuju solusi win-win dalam Bermitra
Profesional : yang mengandung unsur-unsur kompetensi, tanggung jawab,
corporateness, dan etika profesi yang saling terkait serta tidak bisa dipisahpisahkan.
Kerja Cerdas melalui pengembangan kompetensi pribadi ( pengetahuan,
ketrampilan dan sikap positif ) dan kemampuan mengembangkan jaringan koneksi bisnis antar perusahaan.
Memiliki kepekaan terhadap lingkungan, dan proaktif memegang peran
sesuai dengan kompetensi Perusahaan.
Mentaati norma-norma agama, kesusilaan, kesopanan, dan hukum.
mendengar, memahami, memberi masukan, dan mengerjakan pekerjaan dengan sungguh-sungguh, sehingga kami dapat memuaskan pelanggan kami. Kepuasan pelanggan sangat penting bagi kami, karena kami berhasrat untuk membangun tim yang berkelanjutan dengan pelanggan kami.
B. Komitmen Perusahaan
11 BAB III LANDASAN TEORI
3.1 Microcontroller ATMega8
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial USART, Programmable Watchdog Timer, dan mode power saving. Beberapa diantaranya mempunyai ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
ATMEGA 8 adalah mikrokontroler CMOS 8-bit daya rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATMEGA 8 mempunyai throughput mendekati 1 MPS per MHz membuat disain dari sistem untuk mengoptimasi konsumsi daya versus kecepatan proses.
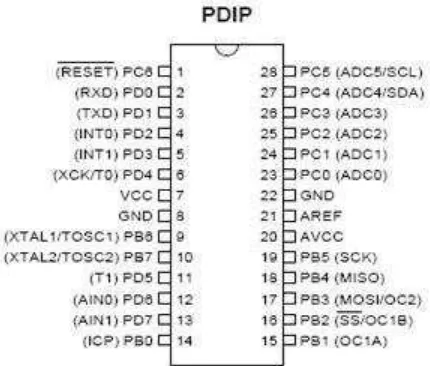
Gambar 1.1 Susunan Pin Microcontroller ATMega8
P e n g g u n a a n r a n g k a i a n m i k r o k o n t r o l e r A T M e g a 8 a d a d u a p i l i h a n , dengan menggunakan board ATMega8 develompment board yang sudah adad i p a a r a n a t a u d e n g a n m e m b u a t s e n d i r i r a n g k l a i a n m i k r o k o n t r o l e r t e r s e b u t . Jika menggunakan rangkaian mikrokonter yang sudah tersedia dipasaran maka akan memepersingkat waktu pembuatan sistem, karena hanya tinggal membeli rangkaian berupa kit dan hanya tinggal menggunakannya.
13
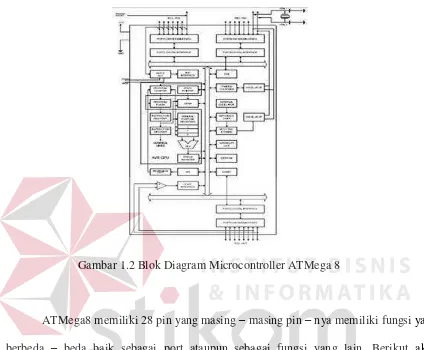
Gambar 1.2 Blok Diagram Microcontroller ATMega 8
ATMega8 memiliki 28 pin yang masing – masing pin – nya memiliki fungsi yang berbeda – beda baik sebagai port ataupun sebagai fungsi yang lain. Berikut akan dijelaskan tentang kegunaan dari masing – masing kaki pada ATMega8.
1. VCC
Merupakan supply tegangan untuk digital 2. GND
Merupakan ground untuk smua komponen yang membutuhkan grounding 3. Port B
8-bit bit-directional I/O port dengan inernal pull-up resistor. Sebagai input, pin – pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Jika ingin menggunakan tambahan kristal, maka cukup untuk menghubungkan kaki dari kristal ke keki pada pin port B. Namun jika tidak digunakan, maka cukup untuk dibiarkan saja. Pengguna kegunaan dari masing – masing kaki ditentukan dari clock fuse setting-nya.
4. Port C
Port C merupakan sebuah 7-bit bi-directional I/O yang di dalam masing – masing pin terdapat pull-up resistor. Jumlah pin-nya hanya 7 buah mulai dari C.0 sampai dengan pin C.6. Sebagai keluaran / output, port C memiliki karakteristik yang sama dalam hal kemampuan menyarap arus ( sink ) ataupun mengeluarkan arus ( source).
5. Reset / PC6
15
6. Port D
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port – port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
7. AVCC
Pada pin ini memiliki fungsi sebagai power supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkanjika ACD pada AVR tidak digunakan, tetap saja disarankan untuk menghubungkan secara terpisah dengan VCC. Cara menghubungkan AVCC adalah melewati low-pass filter setelah itu dihubungkan dengan VCC.
8. AREF
Dalam hal ini untuk beberapa kasus dapat membuang kebutuhan penggunaan instruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal iini harus dilakukan melalui software.
9. Bit 7 (1)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang secara individual maupun yang secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi dengan instruksi SEI dan CLI.
10. Bit 6 (T)
17
11. Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD 12. Bit 4 (S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif di antara Negative Flag (N) dan Two’s Complement Overflow Flag (V).
13. Bit 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
14. Bit 2 (N)
Merupakan bit Negative Flag. Bit ini menyediakan sebuah hasil negative di dalam sebuah fugnsi logika atau aritmatika.
15. Bit 1 (Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “ 0 ”
dalam sebuah fungsi aritmatika atau logika. 16. Bit 0 (C)
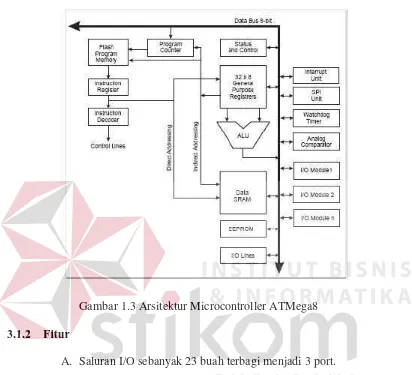
3.1.1 Arsitektur Microcontroller ATMega 8
Gambar 1.3 Arsitektur Microcontroller ATMega8 3.1.2 Fitur
A. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
B. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit. C. Tiga buah timer counter, dua diantaranya memiliki fasilitas pembanding. D. CPU dengan 32 buah register
E. Watchdog timer dan oscillator internal. F. SRAM sebesar 1K byte.
G. Memori flash sebesar 8K Bytes system Self-programable Flash H. Unit interupsi internal dan eksternal.
19
J. EEPROM sebesar 512 byte.
K. Port USART ( Universal Syncronous and Asycronous Serial Receiver and
Transmitter ) untuk komunikasi serial.
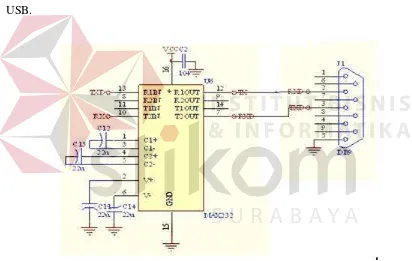
3.1.3 RS 232
RS 232 sebagai pengirim data interface ke laptop, melalaui converter RS 232 ke USB.
Gambar 1.4 Converter Rs 232 ke USB
besar perangkat elektronik masih menggunakan port RS232 media komunikasinya dengan PC. Untuk menjembatani permasalahan tersebut maka banyak diluncurkan produk USB to RS232 yang membuat perangkat elektronik tersebut tetap terdeteksi sebagai COM (Port RS232) pada PC ataupun notebook. Software lama yang sebelumnya masih menggunakan COM pun tidak perlu diubah lagi karena perangkat tersebut masih dianggap berkomunikasi dengan COM (Port RS232) Namun sebagian besar produk USB to RS232 yang ada di pasaran masih menggunakan level +/-12 Volt pada bagian RS232nya sedangkan mikrokontroler hanya dapat menggunakan level TTL 0/+5 Volt saja sehingga dibutuhkan IC MAX232 lagi untuk berkomunikasi dengan modul ini. Modul DU-232, USB to RS232 Converter produksi Delta Electronic memiliki level TTL 0/+5 volt pada bagian RS232nya sehingga dapat dihubungkan langsung pada sistem mikrokontroler tanpa menggunakan MAX232.
3.2 Limit Switch
21
Gambar 2.1 Limit Switch
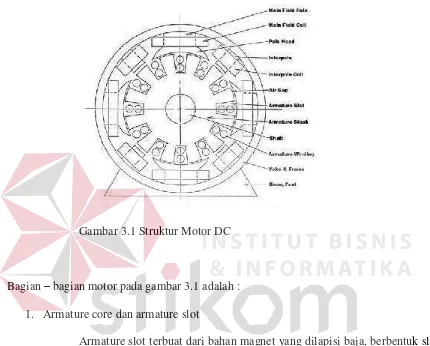
3.3 Motor DC
Motor DC merupakan alat yang berfungsi untuk merubah energy listrik menjadi energy gerak. Prinsip kerjanya adalah bila energy listrik dilewatkan pada sebuah konduktor maka arus akan mengalir pada konduktor tersebut dan akan dihasilkan sebuah medan magnet yang selanjutnya akan menghasilkan energy gerak. Besarnya gaya gerak yang dihasilkan bergantung pada 3 hal yaitu :
1. Arus yang melewati konduktor. 2. Panjang konduktor.
3. Kuat medan magnet.
Dari ketiga factor tersebut dapat dirumuskan :
F = B
XI
XL
Dimana :
F = Gaya gerak ( newton ) B = Kuat medan magnet ( tesla )
Gambar 3.1 Struktur Motor DC
Bagian – bagian motor pada gambar 3.1 adalah : 1. Armature core dan armature slot
Armature slot terbuat dari bahan magnet yang dilapisi baja, berbentuk slot yang dilas bersama dengan armature core.
2. Armature winding
Merupakan belitan pada armature slot yang terhubung dengan komulator dan pada umumnya terbuat dari tembaga.
3. Field poles
23
4. Yoke
Berbentuk lingkaran yang terbuat dari baja yang menyediakan keperluad kutub magnet bagi pole
5. Brushes dan Brush holders
Brush holders memiliki pegas yang berfungsi untuk menjaga brush agar tetap terhubung dengan komulator. Brush pada umumnya terdiri atas tembaga yang fleksibel.
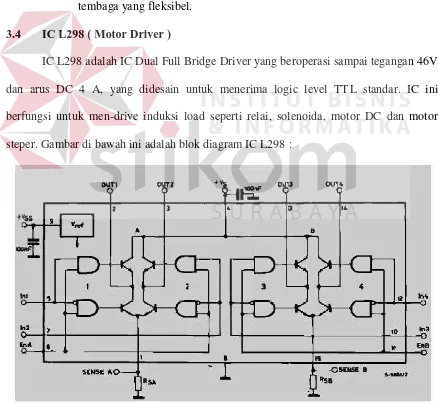
3.4 IC L298 ( Motor Driver )
IC L298 adalah IC Dual Full Bridge Driver yang beroperasi sampai tegangan 46V dan arus DC 4 A, yang didesain untuk menerima logic level TTL standar. IC ini berfungsi untuk men-drive induksi load seperti relai, solenoida, motor DC dan motor steper. Gambar di bawah ini adalah blok diagram IC L298 :
L298 mempunyai 2 output power stage yaitu A dan B pada gambar 4.1. Output power stage adalah sebuah konfigurasi bridge, dimana output-nya dapat men-drive sebuah induktif load secara mode umum atau diffensial tergantung pada input state-nya. Arus yang mengalir keluar dari rangkaian bridge keluar melalui pin output sense, dimana sense output dihubungkan dengan resistor external RsA dan RsB. Dengan adanya resistor RsA dan RsB dapat diketahui intensitas arusnya.
Setiap bridge di drive oleh AND gate yang masing – masing input-nya adalah In1, In2, EnA dan In3, In4, EnB. Input-an In akan men-set bridge bila input-an En high, sebaliknya bila input-an En low maka bridge tidak aktif.
3.5 Remote Control
25
3.5.1 Komponen Remote Control
Komponen-komponen remote control yang dijelaskan adalah jenis remote control yang sering dijumpai di peralatan-peralatan elektronika rumah, menggunakan gelombang infra merah sebagai pembawa sinyal. Sebuah sistem remote control terdiri dari beberapa bagian :
1. Transmitter(pengirim sinyal)
Alat ini berfungsi untuk mengirimkan instruksi ke peralatan elektronika. Alat ini adalah sebuah LED(light emitting Diode) sinar infra merah yang berada di pesawat remote control.
2. Panel Remote control.
Panel ini berisi sejumlah tombol di pesawat remote control. Setiap tombol memiliki fungsi yang berbeda-beda.Bentuk panel ini tergantung dari jenis alat yang dikendalikannya.
3. Papan rangkaian elektronik
Di dalam setiap pesawat remote control terdapat sebuah papan rangkaian elektronik, dalam bentuk sirkuit terintegrasi(integrated circuit). Fungsi komponen ini adalah membaca tombol yang ditekan pengguna kemudian membangkitkan transmitter untuk mengirimkan sinyal dengan pola sesuai tombol yang ditekan 4. Receiver(penerima sinyal)
ini berperan dalam mendeteksi pola sinyal infra merah yang dikirimkan remote control.
Gelombang infra red adalah salah satu nama untuk lebar frekuensi pada spektrum gelombang elektromagnetik. Pada spektrum gelombang electromagnet, panjang gelombang infra red lebih panjang dari cahaya tampak dan lebih pendek dari gelombang radio. Panjang gelombang infra red berada antara 750 nm(nano meter) hingga 1 mm(mili meter). Prinsip cara kerja remote control sendiri sebetulnya cukup sederhana, sinyal sinar infra merah dipancarkan dari pemancar remote control membentuk pola sinyal tertentu. Selanjutnya pola sinyal tersebut akan diterima oleh peralatan elektronik, lalu pola sinyal tersebut akan
diterjemahkan menjadi instruksi tertentu.
3.5.2 Cara Kerja Remote Control
Cara kerja seperti ini mirip dengan cara kerja sandi morse yang dikirim melalui mesin telegraf. Seorang operator pengirim mengirimkan pesan teks singkat kepada operator penerima yang berada pada jarak tertentu. Namun pesan tersebut dikirimkan dalam bentuk pola kode-kode morse yang melambangkan huruf-hururf dalam pesan yang dikirimkannya. Mesin telegraf menggunakan kode tertentu karena tidak dapat
27
akan menerima suara dari bel dalam pola-pola tertentu yang apabila dirangkai akan dapat diterjemahkan sebagai pesan singkat.
Remote control menggunakan LED(Light Emitting Diode) infra merah yang berfungsi sebagai pengirim(transmitter) pola sinar infra merah. LED infra merah adalah sejenis lampu kecil yang memiliki dioda yang akan memancarkan cahaya infra merah apabila diberi arus.
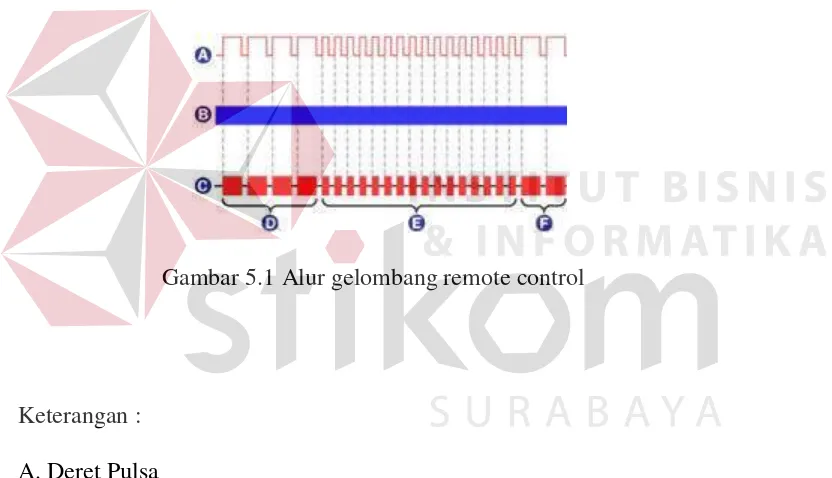
Gambar 5.1 Alur gelombang remote control
Keterangan : A. Deret Pulsa B. Sinyal 27.9 MHz C. Sinyal Transmisi
Sinyal infra merah yang dikirimkan tidak akan dapat dilihat oleh mata kita, karena sinar infra merah tidak termasuk gelombang elektromagnetik pada spectrum cahaya tampak. Namun sinar tersebut dapat terbaca oleh receiver yang ada pada peralatan elektronik yang menerima sinyal tersebut. Receiver yang digunakan adalah sebuah foto transistor infra merah. Jika pola sinyal infra Red yang diterima bersesuaian dengan salah satu instruksi, seperti instruksi menaikkan volume suara pada pesawat televisi, maka volume suara pesawat televisi tersebut akan dinaikkan. Jika pola sinar infra merah yang dibaca tidak dapat dikenali maka pesawat televisi akan mengabaikannya. Hal ini mungkin saja terjadi jika sebuah pesawat remote control untuk peralatan lain yang berada tidak jauh dari pesawat televise tersebut sedang digunakan. Bentuk kode sinyal tersebut untuk masing-masing tombol tergantung kepada perusahaan produsen peralatan elektronika. Pada dasarnya setiap perusahaan bebas menentukan kode sinyal untuk setiap tombol pada pesawat remote control.
29
BAB IV
HASIL KERJA PRAKTEK
4.1 Merancang Rangkaian Remote Control
Sesuai namanya remote control adalah alat pengendali jarak jauh yang berfungsi untuk mengendalikan sebuah benda (biasanya memiliki komponen elektronik). Benda yang dikendalikan tersebut kemudian akan memberikan respon sesuai jenis instruksi yang diberikannya. Instruksi diberikan dengan cara menekan tombol yang sesuai pada remote control. Sejarah mencatat bahwa pada masa awal pengembangannya penerapan remote control sempat digunakan oleh pasukan Jerman untuk menggerakan kapal-kapal lautnya dari jarak jauh untuk ditabrakan ke kapal perang pasukan sekutu pada Perang Dunia I. Saat ini remote control digunakan untuk berbagai keperluan dari untuk mengubah temperatur AC hingga mengatur gerak robot.
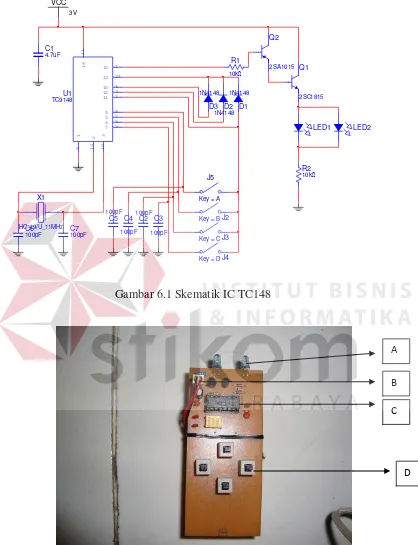
4.1.1 Transmitter
C1
Gambar 6.1 Skematik IC TC148
Gambar 6.2 Remote Control Setelah Jadi
A
B
C
31
Penjelasan Remot Control Transmitter :
1. A = Infra Merah
2. B = Power Suppley 3V
3. C = IC TC9148 ( Transmitter )
4. D = Tombol 4 Arah
4.1.2 Receiver
Pada bagian penerima, untuk menerima sinyal inframerah digunakan phototransistor tipe TSOP34838 phototransistor ini dioperasikan pada panjang gelombang terima pada 950nm yang cocok dengan pemancar TLN105. Pada receiver menggunakan IC TC9149 yang merupakan pasangan dari TC9148. IC ini memiliki 18 buah output yang berbeda untuk setiap fungsi yang dipancarkan dari transmitter yang menggunakan IC TC9148.
33
Gambar 6.5 Receiver Setelah Jadi
Penjelasan Remote Control Receiver :
A = Power Suppley 5V – 24V
B = Phototransistor tipe TSOP34838
C = Pengendali Remote Tombol Atas dan Bawah
D = IC TC9149
E = Pengendali Remote Kanan dan Kiri
4.2 Merancang Driver Motor DC
Modul yang menggunakan IC driver L298 yang memiliki kemampuan menggerakkan motor DC sampai arus 4A dan tegangan maksimum 46 VoltDC untuk satu kanalnya. Rangkaian driver motor DC dengan IC L298 diperlihatkan pada gambar 6.6. Pin Enable A dan B untuk mengendalikan jalan atau kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran. Pin Enable diberi VCC 5 Volt untuk kecepatan penuh dan PWM (Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya. Ilustrasinya ditunjukkan pada gambar 2.
Gambar 7.1 Rangkaian Driver motor DC dengan L298
35
Rangkaian ini sangat berguna dan efesien sekali jika kita ingin membangun suatu mobile robot seperti yang dipergunakan dalam kontes robot indonesia (KRI) dan kontes robot cerdas indonesia (KRCI), paling tidak rangkaian ini sudah penulis buktikan pada tugas kuliah penulis dan berhasil dengan baik.
IC H Bridge driver motor DC L298 memiliki dua buah rangkaian H-Bridge di dalamnya, sehingga dapat digunakan untuk men-drive dua buah motor DC. H Bridge driver motor DC L298 masing – masing dapat mengantarkan arus 2A. Namun, dalam penggunaannya, H Bridge driver motor DC L298 dapat digunakan secara pararel. Sehingga kemampuan menghantarkan dari H Bridge driver motor DC L298 arusnya menjadi 4A. Konsekuensi dari pemasangan H Bridge driver motor DC L298 dengan mode pararel maka, penulis perlu 2 buah H bridge driver motor DC L298 untuk mengendalikan 2 motor DC menggunakan H Bridge driver motor DC pada mode pararel.
Dengan ini pin dari IC H Bridge motor DC l298 yang terhubung dalam modus operasi pararel adalah sebagai berikut :
1. OUT1 dihubungkan dengan OUT4
2. OUT2 dihubungkan dengan OUT#
Gambar 7.3 Mode Pararel H Bridge Driver Motor DC L298
4.3 Minimum Sistem ATMega8
Rangkaian minimum sistem adalah rangkaian minimal dimana chip microcontroller dapat berkerja ( running ). Chip AVR ATMega dilengkapi dengan osilator internal sehingga, untuk menghemat biaya, tidak perlu menggunakan Kristal / resonator eksternal untuk sumber clock CPU.
Sistem minimum AVR sangat sederhana dimana hanya menghubungkan VCC dan AVCC ke +5V dan GND dan AGND ke ground tanpa memakai kristal, dan pin reset diambangkan ( tidak dihubungkan apa-apa ) chip sudah siap berkerja normal.
37
Gambar 8.1 Skematik Minimum Sistem ATMega8
4.4 Pembuatan Program
Program komputer (juga disebut sebagai software atau hanya program) adalah serangkaian instruksi berurutan yang ditulis untuk melakukan serangkaian tugas untuk komputer. Komputer tak memiliki kemampuan untuk menyelesaikan masalahnya sendiri. Komputer hanyalah berupa alat yang digunakan untuk melakukan perhitungan-perhitungan dan serangkaian tugas yang dibebankan kepadanya. Pembuat program disebut sebagai programmer.
pemrograman sebagai alat untuk mengungkapkan ide sang programmer agar dapat dijalankan oleh komputer. Setelah ditulis dalam bahasa pemprograman, tidak serta merta apa yang kita tulis tersebut dapat dilaksanakan oleh komputer. Komputer hanya mengerti bilangan biner dan instruksi-instruksi menggunakan bahasa mesin. Untuk membuat komputer mengerti maksud dan tujuan kita, diperlukanlah sebuah kompiler yang dapat menerjemahkan bahasa pemprograman ke bahasa mesin. Namun ada juga komputer program yang tidak berupa kode bahasa mesin, namun berupa kode-kode khusus dan terkadang juga berupa kode-kode bahasa pemprograman. Program model ini memerlukan bantuan interpreter untuk menerjemahkan bahasa tersebut ke bahasa mesin sehingga dimengerti oleh perangkat keras.
Source code ditulis oleh seorang programmer dan ditulis dengan salah satu bahasa pemprograman menggunakan dua paradigma utama yaitu pemprograman imperatif atau pemprograman deklaratif.
Disini Penulis menggunakan CodeVision AVR sebagai aplikasi untuk memprogram microcontroller ATMega8.
4.4.1 Pengenalan CodeVision AVR
39
digunakan sekarang ini adalah CodeVision AVR yang menggunakan bahasa pemrograman C.
CodeVision AVR mempunyai suatu keunggulan dari compiler lain, yaitu adanya codewizard, fasilitas ini memudahkan kita dalam inisialisasi mikrokontroler yang akan kita gunakan, codevision telah menyediakan konfigurasi yang bisa diatur pada masing-masing chip mikrokontroler yang akan kita gunakan, sehingga kita tidak perlu melihat datasheet untuk sekedar mengonfigurasi mikrokontroler. Berikut ini langkah-langkah menggunakan codevision.
4.4.2 Cara Pengoperasian Aplikasi
1. Buka aplikasi CodeVision AVR
3. Pilih Create a New File or Project
4. Setelah itu muncul dialog box untuk memilih tipe file yang akan dibuat. Pilih file project, kemudian tekan OK.
5. Ketika dikonfirmasi apakah ingin menggunakan CodeWizard?pilih Yes. Ini merupakan fasilitas yang dapat memudahkan pemrogram melakukan konfigurasi mikrokontroler.
41
7. Tab Chip merupakan konfigurasi tipe mikrokontroler yang akan digunakan dan frekuensi yang akan diterapkan pada mikrokontroler. Jika kita skrol pada pilihan Chip, kita dapat memilih berbagai tipe mikrokontroler yang dapat digunakan.
8. Jika kita memilih Atmega8535, kita dapat menggunakan frekuensi sebesar 12MHz untuk mendapatkan kinerja optimal.
10. Pada gambar diatas ditunjukkan bahwa Port A seluruhnya digunakan sebagai input. Jika kita ingin mengganti beberapa pin sebagai output, maka klik tombol disebelah
tulisan Bit ‘x’. Seperti dicontohkan pada gambar berikut :
11. Perlakuan yang sama dapat diterapkan untuk Port B, Port C, dan Port D.
12. Kemudian Pilih File -> Generate, Save, and Exit, setelah itu tampil dialog box untuk menyimpan File source (*.c), file project (*.prj), dan file CodeVisionAVR project (*.cwp). Simpan dengan nama yang sama untuk memudahkan pengelompokan file. 13. Setelah itu muncul source code dengan konfigurasi mikro yang sesuai dengan
43
Setelah pembuatan program selesai, maka wajib untuk meng-load ke dalam microcontroller yang sudah terbuhung dengan minimum sistem yang dapat membantu untuk memasukkan program dalam chip microcontroller tersebut.
4.5 Tahap Penggabungan Antar Rangkaian Hasil Kerja
Setelah kita membuat seluruh rangkaian yang diperlukan seperti pada tahapan perancangan rangkaian elektronika di atas, maka sekarang adalah tahapan untuk menggabungkan seluruh elemen yang penulis buat untuk di gabungkan menjadi satu rangkaian.
Tahapan yang perlu untuk digabungkan adalah sebagai berikut : 1. Rangkaian remote control transmitter dan receiver
2. Rangkaian microcontroller ATMega8 dan driver motor 3. Peletakkan limit switch
4.5.1 Rangkaian Remote Control Transmitter dan Receiver
Disini penulis akan menjelaskan bagaimana tahapan menghubungkan cara kerja transmitter dan receiver dari suatu remote control. Dalam hal ini penulis membuat tombol sebanyak 4 ( empat ) buah. Fungsi dari seluruh tombol adalah sebagai berikut :
1. Tombol atas : Berfungsi sebagai membuka pintu pagar secara otomatis. 2. Tombol bawah : Berfungsi sebagai menutup pintu pagar secara otomatis. 3. Tombol kanan : Berfungsi sebagai menutup pintu pagar secara perlahan. 4. Tombol kiri : berfungsi sebagai membuka pintu pagar secara perlahan.
4.5.2 Rangkaian Microcontroller ATMega8 dan Driver motor
Dalam penggabungan antara microcontroller dengan driver motor, diperlukan sebuah minimum system dalam microcontroller yang berfungsi untuk memasukkan program perintah untuk menjalakan fungsi dari driver motor. Seperti di ulaskan dalam bab 4.3 terdapat beberapa port yang akan memiliki fungsi output untuk menjalankan fungsi dari motor driver. Minimum system harus memiliki daya tidak lebih dari 5V. Tetapi jika memiliki rangkaian regulator maka kita dapat memberikan input tegangan sebesar lebih dari 5V.
Setelah itu driver motor memeliki 4 buah pin yang semua memiliki fungsi berbeda, yaitu :
1. Pin 1 : Berfungsi untuk menjalankan enable A yang berfungsi untuk menjalankan
45
2. Pin 2 : Berfungsi untuk menjalankan enable B yang berfungsi untuk menjalankan motor kea rah mundur .
3. Pin 3 : Berfungsi sebagai input tegangan 5V untuk menjalankan IC L298 4. Pin 4 : Berfungsi sebagai ground tegangan dari driver motor.
4.5.3 Program Untuk Menjalankan Driver Motor
Dinisi penulis akan mencantumkan sebuah program untuk mejalankan driver motor agar dapat menjalankan driver motor sesuai dengan perintah.
This program was produced by the CodeWizardAVR V2.05.0 Professional Automatic Program Generator
© Copyright 1998-2010 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Chip type : ATmega8 Program type : Application
AVR Core Clock frequency: 11.059200 MHz Memory model : Small
External RAM size : 0 Data Stack size : 256
*****************************************************/
#include <mega8.h> #include <delay.h>
#define kanan_manual PIND.0 #define kiri_manual PIND.1 #define kanan_otomatis PIND.2 #define kiri_otomatis PIND.3 #define batas_min PIND.4 #define batas_max PIND.5 #define buka PORTC.3 #define tutup PORTC.2 #define oto PORTC.4
47
unsigned char flag_buka, flag_tutup, darurat;
void buka_otomatis();
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func6=In Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out // State6=T State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTC=0x00; DDRC=0x3F;
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// INT1: Off MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x00;
// USART initialization // USART disabled UCSRB=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// ADC initialization // ADC disabled ADCSRA=0x00;
51
// TWI initialization // TWI disabled TWCR=0x00;
//kanan_manual = kiri_manual = 0; tutup = buka = oto = 0;
oto = tutup = buka = 0; }
}; }
Dari program diatas kita sudah dapat melakukan peritah untuk menjalankan fungsi dari driver motor untuk menjalan motor DC yang memiliki fungsi untuk membuka dan menutup pagar. Secara rinci program dibuat sedemikian rupa sehingga memiliki peranan penting untuk mengakses pintu pagar secara otomatis maupun manual, sehingga pintu pagar dapat menutup dan membuka sesuai dengan kebutuhan kita.
4.5.4Peletakan Limit Switch
Disini penulis memakai 2 buah limit switch. Fungsi dari limit switch tersebut adalah sebagai sebuah sensor untuk mengetahui bahwa pintu pagar sudah menutup dengan kondisi penuh dan membuka secara penuh.
55
Gambar 9.1 Letak dari Limit Switch Keterangan :
A = Limit Switch batas maksimum B = Limit Switch batas minimum
4.5.5 Peletakan Motor DC dengan Pintu Pagar
Disini penulis akan mengulas secara jelas bagaimana bentuk pagar dan bagaimana peletakan motor DC untuk menjalankan membuka dan menutup pintu pagar. Pintu pagar yang penulis buat adalah dengan bahan akrilik / mika. Kenapa penulis pakai, dikarenakan pintu pagar ini bersifat simulasi dan mudah untuk di bongkar ataupun di pasang kembali. Karena tugas dari kerja praktek ini adalah mensimulasikan pintu pagar otomatis. Dapat juga di implementasikan di pintu pagar secara nyala, tetapi perlu merakit secara permanen agar mendapatkan hasil yang baik.
Untuk memiliki fungsi sebagai membuka dan menutup pagar penulis menggunakan ulir yang tersambung dengan mur / baut berbungsi untuk menjalankan
pintu pagar yang disambungkan dengan motor DC agar dapat menjalankan membuka dan menutup pintu pagar. Mur tersebut di tanam dengan sebuah plat yang di tempelkan dengan pintu pagar.
Gambar 9.2 Bentuk dari pintu pagar
Keterangan :
A = Adalah ulir yang terhubung dengan motor DC .
B = Bentuk dari simulasi pintu pagar berbahan akrilik / mika. C = Motor DC
D = Roda yang berfungsi sebagai penggerak dari pintu pagar. E = Lintasan / jalur dari pintu pagar
A
B
C
D
57
4.6 Cara Kerja
Cara kerja dari hasil kerja praktek ini adalah jika tombol atas yang di tekan, maka pintu pagar secara otomatis terbuka sampai dengan titik maksimum atau mengenai sensor limit switch yang mengindikasikan maksimum. Dan jika tombol bawah di tekan, maka pintu pagar tertutup secara otomatis sampai dengan titik maksimum atau dengan menyentuh sensor limit switch yang mengindikasikan minimum.
Tombol kanan dan kiri memiliki fungsi yang berbeda, tetapi dengan prinsip yang sama yaitu dengan menyentuh tomboh kanan maka pintu terbuka tetapi dengan step bahwa jika tombol di lepas maka pintu berhenti.
58 5.1 Kesimpulan
Dari hasil pengamatan dan percobaan yang penulis lakukan di PT. CITRA MANDALASMUDRA dapat penulis simpulkan bahwa, Microcontroller
ATMega 8 adalah sebuah IC yang dirancang secara khusus untuk keperluan membuat alat elektronik yang menggunakan suatu pemograman untuk melakukan suatu eksekusi terhadap alat yang di buat. Microcontroller ATMega8 begitu menarik saat ini, karena dengan fitur yang lengkap serta kemudahan dalam penggunaannya dan juga harga yang relative lebih murah. Masih banyak juga jenis – jenis Microcontroller yang lain yang dapat digunakan untuk membangun suatu rancangan elektronika.
Jika kita sudah memahami konsep dari rangkaian yang akan dibuat, maka kita harus menyesuaikan jenis microcontroller apa yang seharusnya yang akan dipakai.
59
5.2 Saran
Beberapa hal berikut penulis harapkan dapat menjadi masukan bagi semua pihak untuk kemajuan di masa yang akan datang, sebagai berikut :
60
DAFTAR PUSTAKA
Alldatasheet,2011.ATMega8.(Online).(http://www.alldatasheet.com/datasheetpdf/pdf/164
169/ATMEL/ATMEGA8.html, diakses 15 Agustus 2011.).
Alldatasheet,2010.IC TC9148. (Online). (http://www.alldatasheet.com/datasheet-pdf/pdf/51039/FAIRCHILD/TC9148.html, diakses 17 Agustus 2011).
Alldatasheet,2010.IC TC9149. (Online). (http://www.alldatasheet.com/datasheet-pdf/pdf/51039/FAIRCHILD/TC9149.html, diakses 17 Agustus 2011).
Repository,pin Atmega 8. (Online). (http://repository.usu.ac.id/bitstream/1234
56789/20194/4/Chapter%20II.pdf).diakses
Akbarulhuda, 2010. (Online).(http://akbarulhuda.wordpress.com /2010 / 03 /25/
membuat-program-mikorkontroler-menggunakan-codevisionavr/, diakses 20 Agustus
2011).