TUGAS AKHIR
STUDI TERHADAP THERMAL TRANSIENT MOTOR INDUKSI
PADA KEADAAN BLOCK ROTOR
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan
pendidikan sarjana ( S-1 ) pada Departemen Teknik Elektro
Oleh
ASYER RIMBUN WANA HUSODO NABABAN
070402107
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
STUDI TERHADAP THERMAL TRANSIENT MOTOR INDUKSI
PADA KEADAAN BLOCK ROTOR
Oleh:
ASYER RIMBUN WANA HUSODO NABABAN
070402107
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk
memperoleh gelar Sarjana Teknik Elektro
Disetujui Oleh:
Dosen Pembimbing,
Ir. PANUSUR SM. L. TOBING
NIP : 194911231976031002
Diketahui Oleh:
Ketua Departemen Teknik Elektro F.T. USU
Ir. Surya Tarmizi Kasim,M.Si
NIP : 19540531986011002
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATEA UTARA
MEDAN
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Tuhan Yang Maha Esa atas
berkat dan rahmat-Nya sehingga penulis dapat menyelesaikan Tugas Akhir yang
berjudul :
STUDI TERHADAP THERMAL TRANSIENT MOTOR INDUKSI PADA KEADAAN BLOCK ROTOR.
Tugas Akhir ini merupakan bagian dari kurikulum yang harus diselesaikan
untuk memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di
Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
Selama penulis menjalani pendidikan di kampus hingga diselesaikannya
Tugas Akhir ini, penulis banyak menerima bantuan, bimbingan serta dukungan
dari berbagai pihak. Pada kesempatan ini penulis ingin menyampaikan
terimakasih yang tulus dan sebesar-besarnya kepada :
1. Orang tua, kakak dan ketiga adik saya yang tidak pernah berhenti memberi
dukungan, semangat dan doanya kepada saya dengan segala pengorbanan
dan kasih sayang yang tidak ternilai besarnya.
2. Bapak Ir. Panusur S.M.LTobing, sebagai dosen pembimbing tugas akhir
saya yang telah memberikan bimbingan dan yang sangat besar bantuannya
dalam menyelesaikan tugas akhir ini.
3. Bapak Ir. Surya Tarmizi Kasim, selaku Dosen Wali penulis dan Ketua
Departemen Teknik Elektro yang banyak memberikan bantuan atas
kebijakan kebijakan yang membantu penulis dalam penyelesaian Tugas
4. Bang Isroy Tanjung sebagai Staff Administrasi Laboratorium Konversi
Energi Listrik,Fachmi Syawali selaku Asisten Laboratoruium yang telah
menyediakan waktunya untuk pengambilan data di laboratorium, dan Kak
Mintanur (Kak Ani) yang banyak memberikan bantuan dalam kelancaran
proses menuju penyelesaian studi penulis.
5. Bapak Ir.Eddy Warman dan Bapak Ir.Satria Ginting sebagai dosen yang
telah banyak membimbing penulis serta seluruh Staff Pengajar dan
Pegawai Departemen Teknik Elektro FT-USU.
6. Teman-teman seperjuangan di Elektro yaitu Rocky, Ramcheys,
Francisco-cimet, Harapan, Rumonda, Jon, Tony, Niko, Maria dan yang lainnya yang
tidak bisa saya sebutkan namanya satu persatu, atas kebersamaan dan
dukungan yang diberikan. Nama kalian akan selalu terpatri dalam hati
sanubari penulis.
Penulis meyadari bahwa Tugas Akhir ini masih banyak kekurangannya.
Kritik dan saran dari pembaca untuk menyempurnakan Tugas Akhir ini sangat
penulis harapkan.
Akhir kata semoga Tugas Akhir ini dapat bermanfaat bagi kita semua.
Medan, Juni 2012
ABSTRAK
Motor induksi adalah motor yang umumnya digunakan dalam
perindustrian karena penggunaan dan perawatannya yang lebih sederhana,
pemasangannya yang tidak sulit, dan biayanya lebih murah dari motor sinkron.
Dalam pengoperasian motor induksi timbul beberapa rugi rugi antara lain rugi
rugi dielektrik / joule, rugi rugi besi, rugi rugi beban sasar, dan rugi rugi mekanis.
Rugi rugi inilah yang menimbulkan panas pada motor induksi.
Dalam Tugas Akhir ini penulis mencoba mengangkat fenomena thermal
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iii
DAFTAR ISI ... iv
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan Penulisan ... 1
1.3 Batasan Masalah ... 2
1.4 Metode Penulisan ... 2
1.5 Sistematika Penulisan ... 3
BAB II MOTOR INDUKSI TIGA PHASA 2.1 Umum ... 5
2.2 Prinsip Kerja Motor Induksi Tiga Phasa ... 6
2.2.1 Gambaran Umum Motor Induksi Tiga Fasa ... 6
2.2.2 Prinsip Kerja Motor Induksi Tiga Fasa ... 10
2.3 Rangkaian Ekivalen Motor Induksi Tiga Fasa ... 13
2.3.1 Rangkaian Ekivalen Stator ... 13
2.3.2 Rangkaian Ekivalen Rotor ... 15
2.4 Aliran Daya dan Efisiensi Motor Induksi ... 19
2.4.2 Efisiensi ... 22
2.5 Klasifikasi Desain Motor Induksi ... 24
BAB III THERMAL TRANSIENT MOTOR INDUKSI PADA KEADAAN BLOCK ROTOR 3.1 Umum ... 26
3.2 Mekanisme Timbulnya Panas pada Motor Induksi ... 27
3.3 Panas Pada Konduktor Yang Dialiri Arus ... 29
3.4 Kapasitas Panas dan Panas Spesifik ... 32
3.5 Panas Pada Motor Induksi Rotor Sangkar ... 33
3.5.1 Jenis Pendinginan ...34
3.5.2 Transfer Panas Pada motor Induksi ...34
3.5.3 Temperatur Lingkungan Pengoperasian Motor Induksi....38
3.5.4 Isolasi pada motor induksi...38
3.5.5 Pengaruh Panas Terhadap isolasi motor...40
3.5.6 Kenaikan Panas Pada Motor Induksi Rotor Sangkar...44
3.5.7 Panas Pada Motor Pada Saat Starting...46
3.5.8 Kenaikan Panas Pada Saat Block Rotor...46
3.5.9 Lamanya Waktu Block Rotor yang aman...49
3.6 Parameter Motor Induksi Tiga Fasa ... 50
3.6.1 Pengujian Tahanan Stator...50
3.6.2 Pengujian Block Rotor...52
BAB IV PERCOBAAN THERMAL TRANSIENT MOTOR INDUKSI PADA KEADAAN BLOCK ROTOR
4.1 Umum ... 56
4.2 Peralatan Yang Digunakan ... 57
4.3 Percobaan Menentukan Parameter Motor induksi Tiga phasa ... 59
4.3.1 Pengukuran Tahanan Stator (DC test ) ... 59
4.3.1.1 Rangkaian Percobaan ... 59
4.3.1.2 Prosedur Percobaan ... 59
4.3.1.3 Data Hasil Percobaan ... 60
4.3.1.4 Analisa Data ... 60
4.3.2 Percobaan Pengukuran Tahanan Rotor (DC test ) ... 61
4.3.2.1 Rangkaian Percobaan ... 61
4.3.2.2 Prosedur Percobaan ... 62
4.3.2.3 Data Hasil Percobaan ... 62
4.3.2.4 Analisa Data ... 63
4.3.3 Percobaan Hubung Singkat ( block rotor ) ... 63
4.3.3.1 Rangkaian Percobaan ... 63
4.3.3.2 Prosedur Percobaan ... 64
4.3.3.3 Data Hasil Percobaan ... 65
4.3.3.4 Analisa Data ... 65
4.3.4 Percobaan Beban Nol ... 67
4.3.4.1 Rangkaian Percobaan ... 67
4.3.4.2 Prosedur Percobaan ... 68
4.3.4.4 Analisa Data ... 68
4.4 Rangkaian Ekivalen Motor Induksi ... 70
4.5 Percobaan Pengukuran Thermal Transient Motor Induksi ... 73
4.5.1 Rangkaian Percobaan ... 73
4.5.2 Prosedur Percobaan ... 73
4.5.3 Data Hasil Percobaan ... 74
4.5.4 Analisa Data ... 75
4.6 Analisa Thermal Transient Motor Induksi Dalam Waktu Tertentu ... 77
4.6.1 Perhitungan Thermal Transien Motor Induksi Pada Keadaan Normal ... 78
4.6.2 Perhitungan Thermal Transien Motor Induksi Pada Keadaan Block Rotor ... 79
4.6.3 Perhitungan Thermal Transien Motor Induksi Setelah 10 detik Block Rotor dilepas ... 80
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 84
5.2 Saran ... 85
DAFTAR TABEL
Tabel 3.5.1 Kelas Isolasi motor induksi berdasarkan standar IEC ... 40
Tabel 3.5.2 Batas temperatur maksimal yang diijinkan pada motor induksi berdasarkan standar IEC 60034-18-1 ... 43
Tabel 3.6.1 Standar besarnya reaktansi berbagai jenis desain rotor ... 53
Tabel 4.3.1 Data Hasil Percobaan Tahanan DC pada stator ... 60
Tabel 4.3.2 Data Hasil Percobaan Tahanan DC pada rotor ... 62
Tabel 4.3.3 Data Hasil Percobaan Hubung Singkat ... 65
Tabel 4.3.4 Data Hasil Percobaan Beban Nol ... 68
Tabel 4.4.1 Data Hasil Percobaan Pengukuran Thermal Transient motor Induksi ... 74
DAFTAR GAMBAR
Gambar 2.1.1 Potongan Motor Induksi ... 7
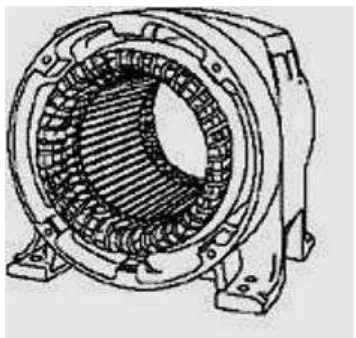
Gambar 2.1.2 Stator Motor Induksi. ... 8
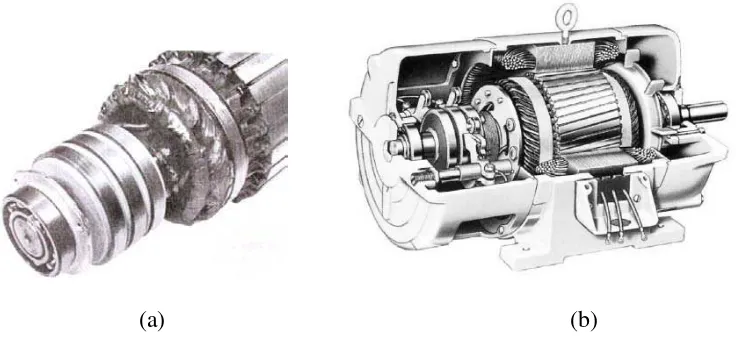
Gambar 2.1.3 (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan (b) Motor Induksi Tiga Fasa Rotor Belitan ... 9
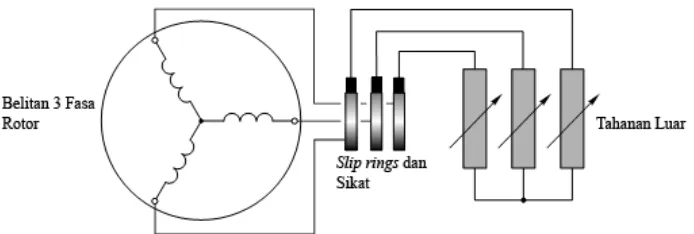
Gambar 2.1.4 Skematik Diagram Motor Induksi Rotor Belitan ... 9
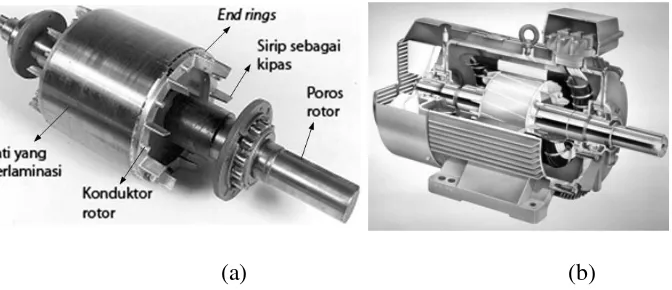
Gambar 2.1.5 (a) Rotor Sangkar Tupai dan Bagian-bagiannya (b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai ... 10
Gambar 2.2.1 Kaidah Tangan Kanan (Right Hand Rule) ... 12
Gambar 2.3.1 Rangkaian Ekivalen Stator Motor Induksi ... 14
Gambar 2.3.2 Rangkaian Ekivalen Pada Rotor Motor Induksi ... 16
Gambar 2.3.3 Rangkaian Ekivalen Motor Induksi Tiga Phasa ... 17
Gambar 2.3.4 Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi ... 17
Gambar 2.3.5 Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi ... 18
Gambar 2.3.6 Rangkaian Ekivalen Lain Dari Motor Induksi ... 19
Gambar 2.4.1 Diagram Aliran Daya Motor Induksi ... 22
Gambar 2.5.1 Karakteristik Torsi-Kecepatan Motor Induksi Pada Berbagai Disain ... 25
Gambar 3.2.1 Loop Hysteresis ... 28
Gambar 3.3.1 . Arus yang mengalir pada sebuah tahanan...29
Gambar 3.3.2 Elektron – elektron bebas yang berpindah dari satu atom ke atom lainnya... 30
Gambar 3.5.2 Konduksi pada sebuah slot konduktor motor induksi ... 35
Gambar 3.5.3 Belitan pada sebuah slot yang berisolasi. ... 39
Gambar 3.5.4 Kurva umur isolasi motor induksi untuk masing-masing kelas apabila dioperasikan diatas batas temperatur kelas isolasi ... 42
Gambar 3.6.1 Rangkaian Pengujian Tahanan Stator Arus Searah motor Induksi ... 50
Gambar 3.6.2 Rangkaian Rotor Ditahan Motor Induksi ... 52
Gambar 3.6.3 Rangkaian pengujian beban nol motor induksi ... 54
Gambar 4.3.1 Rangkaian Percobaan Tahanan DC Pada Stator ... 59
Gambar 4.3.2 Rangkaian Percobaan Tahanan DC Pada Rotor ... 61
Gambar 4.3.3 Rangkaian Percobaan Hubung Singkat ... 64
Gambar 4.3.4 Rangkaian Percobaan Beban Nol ... 67
Gambar 4.4.1 Rangkaian Percobaan Pengukuran Thermal Transient motor Induksi ... 73
ABSTRAK
Motor induksi adalah motor yang umumnya digunakan dalam
perindustrian karena penggunaan dan perawatannya yang lebih sederhana,
pemasangannya yang tidak sulit, dan biayanya lebih murah dari motor sinkron.
Dalam pengoperasian motor induksi timbul beberapa rugi rugi antara lain rugi
rugi dielektrik / joule, rugi rugi besi, rugi rugi beban sasar, dan rugi rugi mekanis.
Rugi rugi inilah yang menimbulkan panas pada motor induksi.
Dalam Tugas Akhir ini penulis mencoba mengangkat fenomena thermal
BAB I
PENDAHULUAN
I.1 LATAR BELAKANG
Motor induksi tiga phasa adalah motor listrik yang paling banyak
digunakan dalam industri. Apabila dioperasikan dalam selang waktu tertentu
maka akan timbul panas pada motor induksi. Panas tersebut dapat menimbulkan
kerusakan kerusakan pada motor induksi.
Prediksi distribusi panas pada motor induksi sangat diperlukan terutama
untuk desain motor. Prediksi tersebut dibutuhkan untuk mengevaluasi mesin agar
disesuaikan pada kelas thermal mana untuk disesuaikan rancangannya, untuk
menetapkan interval pelumasan bantalan, dan untuk memeriksa apakah aliran
udara dari sistem pendingin sudah sesuai dengan kondisi operasi normal motor.
Panas Transien (Thermal Transient) menyatakan suhu atau kuantitas
thermal lainnya yang mungkin berbeda dari waktu ke waktu.
I.2 TUJUAN PENULISAN
Mempelajari tentang panas transien (thermal transient) dari pengoperasian
motor induksi pada saat block rotor dari waktu ke waktu yang hasilnya dapat
dipergunakan untuk evaluasi desain motor, evaluasi pelumasan pada motor, dan
evaluasi proses pendinginan dari sistem pendingin pada motor induksi.
Agar tujuan penulisan ini sesuai dengan yang diharapkan serta terfokus
pada judul dan bidang yang telah disebutkan di atas,maka penulis membatasi
permasalahan yang akan dibahas sebagai berikut :
1. Tidak membahas penurunan rumus.
2. Tidak membahas perubahan suhu setelah suhu motor berada di titik
jenuh.
3. Tugas akhir ini dilakukan dalam rangka studi bukan aplikasi
pemodelan secara langsung.
I.4 METODOLOGI PENULISAN
1. Studi Literatur
Dalam studi literatur akan dipelajari tentang motor induksi dan hal-
hal yang berkaitan.
2. Studi Bimbingan
Dalam hal ini penulis melakukan diskusi tentang topik tugas akhir
ini dengan dosen pembimbing yang telah ditunjuk oleh pihak
Departemen Teknik Elektro
3. Pengumpulan data data yang berhubungan dengan Tugas Akhir
Mengumpulkan data data motor induksi dan data pendukung
I.5 SISTEMATIKA PEMBAHASAN
Sistematika pembahasan Tugas Akhir ini disusun sebagai berikut :
BAB I : PENDAHULUAN
Bagian ini berisi mengenai latar belakang masalah,
tujuan penulisan, pembatasan masalah dan
sistematika penulisan
BAB II : MOTOR INDUKSI TIGA PHASA
Bagian ini menjelaskan tentang motor induksi tiga
phasa secara umum yaitu konstruksi motor, prinsip
kerja dan mekanisme perpindahan panas pada motor
induksi tiga phasa.
BAB III : THERMAL TRANSIENT MOTOR INDUKSI
PADA KEADAAN BLOCK ROTOR
Bagian ini menjelaskan tentang pengertian thermal
transien secara umum dan gejala transien yang
menyebabkan thermal pada keadaan rotor terkunci.
BAB IV : PERCOBAAN THERMAL TRANSIENT MOTOR
Bab ini berisikan percobaan untuk menjelaskan
tentang thermal transient motor induksi pada
keadaan block rotor.
BAB V : KESIMPULAN DAN SARAN
Bab ini adalah bagian yang merupakan kesimpulan
dan saran yang berkaitan dengan pembahasan studi
terhadap thermal transien motor induksi pada
BAB II
MOTOR INDUKSI TIGA PHASA
2.1. Secara Umum
Motor-motor pada dasarnya digunakan sebagai sumber beban untuk
menjalankan alat-alat tertentu atau membantu manusia dalam menjalankan
pekejaannya sehari-hari, terutama dalam bidang perindustrian
Umumnya motor listrik yang digunakan dalam perindustrian terbagi atas
dua jenis, yaitu Motor DC ( Direct Current ) dan Motor AC ( Alternating Current
).Motor AC terdiri dari motor sin kron dan motor asinkron ( motor induksi ).
Karakteristik dari motor DC, yaitu :
• Torsi tinggi pada kecepatan rendah
• Kemampuan pada beban lebih lebih baik
• Lebih mahal dibandingkan dengan motor AC
• Pada daya yang sama ukuran fisik lebih besar daripada motor AC
• Memerlukan perawatan dan perbaikan lebih rutin
Karakteristik dari motor induksi, yaitu :
• Kecepatan konstan
• Lebih murah dibandingkan motor DC
• Arah putaran dapat dibalik dengan menukarkan dua dari tiga line daya
utama pada motor.
• Sederhana, kuat, dan konstruksinya kuat
Pada Tugas Akhir ini memilih menggunakan motor induksi AC karena
Motor induksi AC dapat bekerja pada sistcm tegangan suplai satu phasa
maupun sistem tegangan suplai tiga phasa. Daya motor induksi satu phasa kurang
dari 3 HP dan biasanya digunakan pada lokasi dimana tidak terdapat tegangan
suplai tiga phasa. Selain itu pada daya yang sama ukuran fisik dari motor satu
phasa lebih besar dibandingkan dengan motor tiga phasa. Sedangkan daya motor
induksi tiga phasa dapat lebih dari beberapa ribu HP, ukuran fisiknya lebih kecil
daripada yang satu phasa, dan umumnya yang digunakan adalah daya kurang dari
50 HP.
Tugas Akhir ini menggunakan motor induksi tiga phasa karena
mempergunakan tegangan suplai tiga phasa dari PLN.
Berdasarkan rotor dari motor induksi terdapt dua jenis motor, yaitu motor
sangkar bajing ( squirrel-cage motor ) dan motor rotor-lilitan ( woundrotor
induction motor ). Yang dipergunakan dalam Tugas Akhir ini adalah motor
sangkar bajing karena murah, mudah perawatannya, sederhana, kuat, dan
keandalannya tinggi.
2.2. Pinsip Kerja Motor Induksi Tiga Fasa
2.2.1. Gambaran Umum Motor Induksi Tiga Fasa
Sebuah motor induksi tiga fasa memiliki konstruksi yang hampir sama
dengan motor listrik jenis lainnya. Pada dasarnya terdiri atas dua bagian, yaitu
stator, adalah bagian dari motor yang tidak bergerak ( tidak berputar ) dan rotor,
bagian dari motor yang bergerak. Rotor letaknya terpisahkan dari stator dengan
adanya celah udara ( gap ) yang besarnya dari 0,4 mm sampai 4 mm, tergantung
Penampang potongan motor induksi tiga phasa ditunjukkan pada Gambar
2.1.1
Gambar 2.1.1 Potongan motor induksi
2.2.1.1. Stator
Stator adalah bagian dari motor yang tidak bergerak ( tidak berputar ) dan
terdiri dari beberapa bagian. Penampang dari stator motor induksi sangkar bajing
ditunjukkan pada Gambar 2.1.2
Inti stator lapis-lapis plat baja beralur yang didukung dalam rangka stator
yang terbuat dari besi tuang atau plat baja yang dipabrikasi. Lilitan lilitan
diletakkan dalam alur stator yang terpisah 120". Lilitan phasa ini bisa tersambung
delta (A ) ataupun star ( Y ).
2.2.1.2. Rotor
Berdasarkan jenis rotor nya, motor induksi tiga fasa dapat dibedakan
menjadi dua jenis, yang juga akan menjadi penamaan untuk motor tersebut, yaitu
rotor belitan (wound rotor) dan rotor sangkar tupai (squirrel cage rotor).
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang
merupakan bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor
belitan biasanya terhubung Y, dan masing-masing ujung dari tiga kawat belitan
fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor
(gambar 2.1.3(a)). Belitan-belitan rotor ini kemudian dihubung singkatkan melalui
sikat (brush) yang menempel pada slip ring (perhatikan gambar 2.1.4), dengan
menggunakan sebuah perpanjangan kawat untuk tahanan luar.
(a) (b)
Gambar 2.1.3. (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan
Gambar 2.1.4. Skematik Diagram Motor Induksi Rotor Belitan
Dari gambar 2.1.4. dapat dilihat bahwa semata-mata keberadaan slip ring
dan sikat hanyalah sebagai penghubung belitan rotor ke tahanan luar (exsternal
resistance). Keberadaan tahanan luar disini berfungsi pada saat pengasutan yang
berguna untuk membatasi arus mula yang besar. Tahanan luar ini kemudian secara
perlahan dikurangi sampai resistansinya nol sebagaimana kecepatan motor
bertambah mencapai kecepatan nominalnya. Ketika motor telah mencapai
kecepatan nominalnya, maka tiga buah sikat akan terhubung singkat tanpa
tahanan luar sehingga rotor belitan akan bekerja seperti halnya rotor sangkar
tupai.
Rotor sangkar mempunyai kumparan yang terdiri atas beberapa batang
konduktor yang disusun sedemikian rupa hingga menyerupai sangkar tupai. Rotor
terdiri dari tumpukan lempengan besi tipis yang dilaminasi dan batang konduktor
yang mengitarinya (perhatikan gambar 2.1.5(a)). Tumpukan besi yang dilaminasi
disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor)
dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor
yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang
dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring)
atau disebut juga dengan end ring.
(a) (b)
Gambar 2.1.5. (a) Rotor Sangkar Tupai dan Bagian-bagiannya (b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai
2.2.2. Prinsip Kerja Motor Induksi Tiga Fasa
Pada saat terminal tiga fasa stator motor induksi diberi suplai tegangan
tiga fasa seimbang, maka akan mengalir arus pada konduktor di tiap belitan fasa
stator dan akan menghasilkan fluksi bolak-balik . Amplitudo fluksi per fasa yang
dihasilkan berubah secara sinusoidal dan menghasilkan fluks resultan (medan
putar) dengan magnitud yang nilainya konstan yang berputar dengan kecepatan
sinkron :
ns = 120 f/p ………
(2.1)
dimana,
ns = kecepatan sinkron/medan putar (rpm)
f = frekuensi sumber daya (Hz)
p = jumlah kutub motor induksi
Medan putar akan terinduksi melalui celah udara menghasilkan ggl induksi (ggl
konduktor-konduktor belitan rotor yang diam (perhatikan gambar 2.2.1). Hal ini
terjadi karena adanya perbedaan relatif antara kecepatan fluksi yang berputar
dengan konduktor rotor yang diam, yang disebut juga dengan slip (s).
s =��−��
�� ………. (2.2)
Akibat adanya slip, maka ggl (gaya gerak listrik) akan terinduksi pada
konduktor-konduktor rotor.
Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin
ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada
konduktor-konduktor rotor. Karena konduktor-konduktor-konduktor-konduktor rotor yang mengalirkan arus
ditempatkan di dalam daerah medan magnet yang dihasilkan stator, maka akan
terbentuklah gaya mekanik (gaya lorentz) pada konduktor-konduktor rotor. Hal ini
sesuai dengan hukum gaya lorentz yaitu bila suatu konduktor yang dialiri arus
berada dalam suatu kawasan medan magnet, maka konduktor tersebut akan
mendapat gaya elektromagnetik (gaya lorentz) sebesar :
F = B.i.l.sin θ ……… (2.3)
dimana,
F = gaya yang bekerja pada konduktor (Newton)
B = kerapatan fluks magnetik (Wb/m2)
i = besar arus pada konduktor (A)
l = panjang konduktor (m)
θ = sudut antara konduktor dan vektor kerapatan fluks magnetik
Gaya F ini adalah hal yang sangat penting karena merupakan dasar dari
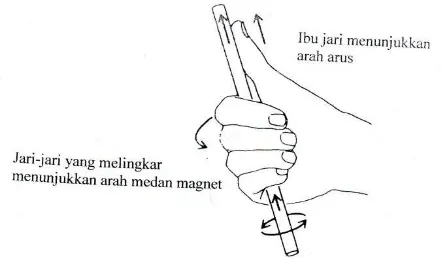
Arah dari gaya elektromagnetik tersebut dapat dijelaskan oleh kaidah
tangan kanan (right-hand rule) seperti pada gambar 2.2.1. Kaidah tangan kanan
menyatakan, jika jari telunjuk menyatakan arah dari vektor arus i dan jari tengah
menyatakan arah dari vektor kerapatan fluks B, maka ibu jari akan menyatakan
arah gaya F yang bekerja pada konduktor tersebut.
Gambar 2.2.1. Kaidah Tangan Kanan (Right Hand Rule)
Gaya F yang dihasilkan pada konduktor-konduktor rotor tersebut akan
menghasilkan torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar
daripada torsi beban (τ0 > τb), maka rotor akan berputar searah dengan putaran
medan putar stator.
Seperti yang telah disebutkan di atas, motor akan tetap berputar bila
kecepatan medan putar lebih besar dari pada kecepatan putaran rotor (ns > nr).
Apabila ns = nr, maka tidak ada perbedaan relatif antara kecepatan medan putar
(ns) dengan putaran rotor (nr), atau dengan kata lain slip (s) adalah nol. Hal ini
menyebabkan tidak adanya ggl terinduksi pada kumparan rotor sehingga tidak ada
arus yang mengalir, dengan demikian tidak akan dihasilkan gaya yang dapat
2.3. Rangkaian Ekivalen Motor Induksi Tiga Fasa
Telah disebutkan sebelumnya bahwa motor induksi identik dengan sebuah
transformator, tentu saja dengan demikian rangkaian ekivalen motor induksi sama
dengan rangkaian ekivalen transformator. Perbedaan yang ada hanyalah, karena
pada kenyataannya bahwa kumparan rotor (kumparan sekunder pada
transformator) dari motor induksi berputar, yang mana berfungsi untuk
menghasilkan daya mekanik. Awal dari rangkaian ekivalen motor induksi
dihasilkan dengan cara yang sama sebagaimana halnya pada transformator. Semua
parameter-parameter rangkaian ekivalen yang akan dijelaskan berikut mempunyai
nilai-nilai perfasa.
2.3.1 Rangkaian Ekivalen Stator
Gelombang fluks pada celah udara yang berputar dengan kecepatan
sinkron membangkitkan ggl lawan tiga fasa yang seimbang Ē1 di dalam fasa-fasa stator. Besarnya tegangan terminal stator ��1berbeda dengan ggl lawanĒ1sebesar jatuh tegangan pada impedansi bocor stator �̅1(�1+��1), sehingga dapat
dinyatakan dengan persamaan :
��1 = Ē1+�̅1(�1+��1)………(2.4)
dimana,
��1 = tegangan terminal stator (Volt)
Ē1 = ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt) �̅1 = arus stator (Ampere)
Sebagaimana halnya pada transformator, arus stator �̅1 terdiri dari dua komponen. Komponen pertama �̅2 adalah komponen beban yang akan menghasilkan fluks yang akan melawan fluks yang dihasilkan oleh arus rotor. Komponen lainnya
yaitu �̅0, arus �̅0 ini terbagi lagi menjadi dua komponen yaitu komponen rugi-rugi inti �̅0 yang sefasa dengan Ē1 dan komponen magnetisasi �̅� yang menghasilkan fluks magnetik pada inti dan celah udara yang tertinggal 90° dari Ē1. Sehingga dapat dibuat rangkaian ekivalen pada stator, seperti gambar 2.3.1
berikut ini.
Gambar 2.3.1. Rangkaian Ekivalen Stator per-Fasa Motor Induksi
2.3.2. Rangkaian Ekivalen Rotor
Reaktansi yang didapat karena sebanding dengan frekuensi rotor
dan slip. Jadi X2 didefinisikan sebagai harga yang akan dimiliki oleh reaktansi
bocor pada rotor dengan patokan pada frekuensi stator.
Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron.
Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi
slip sebesar E2s dan ggl lawan stator E1. Bila bukan karena efek kecepatan,
tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik
adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator
dan rotor adalah:
E2s = sE1 ………...…….(2.5)
Gelombang fluks magnetik pada rotor dilawan oleh fluks magnetik yang
dihasilkan komponen beban I2 dari arus stator, dan karenanya, untuk harga
efektif
I2s= I2 ………...(2.6)
Dengan membagi persamaan (2.5) dengan persamaan (2.6) didapatkan:
=
Didapat hubungan antara persamaan (2.6) dengan persamaan (2.7), yaitu
=
Dengan membagi persamaan (2.8) dengan s, maka didapat
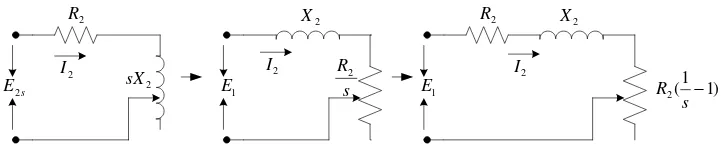
Dari persamaan (2.9) dapat dibuat rangkaian ekivalen untuk rotor.
Dari persamaan (2.5) dan (2.9) maka dapat digambarkan rangkaian ekivalen pada
rotor sebagai berikut :
s
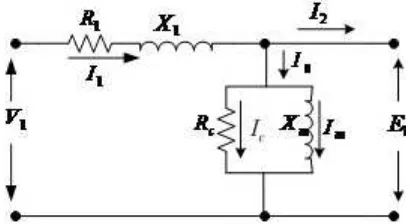
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka
dapat dibuat rangkaian ekivalen motor induksi tiga fasa pada masing – masing
fasanya. Perhatikan gambar di bawah ini.
1
Gambar2.3.3. Rangkaian Ekivalen Motor Induksi Tiga Phasa
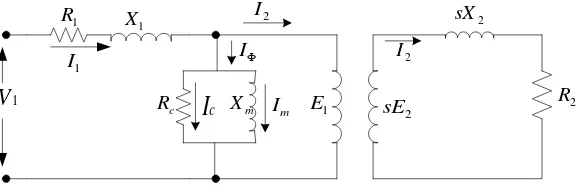
Untuk mempernudah perhitungan maka rangkaian ekivalen pada gambar
2.3.3 diatas dapat dilihat dari sisi stator, rangkaian ekivalen motor induksi tiga
fasa akan dapat digambarkan sebagai berikut.
1
1
Gambar 2.3.5. Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi Dimana:
X'2= a2X2
R'2= a2R2
Dalam teori transformator-statika, analisis rangkaian ekivalen sering
disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan
pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan
demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan
normal, karena adanya celah udara yang menjadikan perlunya suatu arus
peneralan yang sangat besar (30% sampai 40% dari arus beban penuh) dan karena
reaktansi bocor juga perlu lebih tinggi. Untuk itu dalam rangkaian ekivalen Rc
dapat dihilangkan (diabaikan). Rangkaian ekivalen menjadi gambar berikut.
1
2.4. Aliran daya dan Efisiensi Motor Induksi 2.4.1. Aliran Daya
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang
diinputkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin)
dirumuskan dengan
Pin = 3V1I1cosθ ( Watt ) ………..;………...( 2.11 )
dimana :
V1 = tegangan sumber (Volt)
I1 = arus masukan(Ampere)
θ = perbedaan sudut phasa antara arus masukan dengan tegangan sumber.
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik pada
poros motor. Berbagai rugi – rugi yang timbul selama proses konversi energi
listrik antara lain :
1. rugi – rugi tetap ( fixed losses ), terdiri dari :
2. rugi – rugi variabel, terdiri dari :
rugi – rugi tembaga stator ( Pts )
Pts = 3. I12. R1 ( Watt ) ……..……….….……….( 2.13 )
Ptr = 3. I22. R2 ( Watt ) …..……….………..( 2.14 )
Daya pada celah udara ( Pcu ) dapat dirumuskan dengan :
Pcu = Pin – Pts – Pi ( Watt ) ……….…………( 2.15 )
Jika dilihat pada rangkaian rotor, satu – satunya elemen pada rangkaian
ekivalen yang mengkonsumsi daya pada celah udara adalah resistor R2 / s. Oleh
karena itu daya pada celah udara dapat juga ditulis dengan :
Pcu = 3. I22.
S
R2
( Watt ) ……….……….………..( 2.16 )
Apabila rugi – rugi tembaga dan rugi – rugi inti dikurangi dengan daya
input motor, maka akan diperoleh besarnya daya listrik yang diubah menjadi daya
mekanik.
tembaga dengan daya pada celah udara :
Ptr = s. Pcu ( Watt ) ……….…………( 2.19 )
Karena daya mekanik yang dibangkitkan pada motor merupakan selisih
dari daya pada celah udara dikurangi dengan rugi – rugi tembaga rotor, maka daya
mekanik dapat juga ditulis dengan :
Daya output akan diperoleh apabila daya yang dikonversikan dalam
bentuk daya mekanik dikurangi dengan rugi – rugi gesek dan angin, sehingga
daya keluarannya :
Pout = Pmek – Pa&g – Pb ( Watt ) ………...………( 2.21 )
Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan
dalam bentuk slip yaitu :
Pcu : Ptr : Pmek = 1 : s : 1 – s.
Gambar 2.4.1 menunjukkan aliran daya pada motor induksi tiga phasa :
Energi listrik konversi Energi mekanik
Gambar 2.4.1. Diagram Aliran Daya Motor Induksi
2.4.2. Efisiensi
Efisiensi dari suatu motor induksi didefenisikan sebagai ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik
yang dinyatakan sebagai perbandingan / rasio daya output ( keluaran ) dengan
daya input ( masukan ), atau dapat juga dirumuskan dengan :
Pin = 3 . V1. I1. Cos………( 2.24
)
Dari persamaan di atas dapat dilihat bahwa efisiensi motor tergantung
pada besarnya rugi – rugi. Pada dasarnya metode yang digunakan untuk
menentukan efisiensi motor induksi bergantung pada dua hal apakah motor itu
dapat dibebani secara penuh atau pembebanan simulasi yang harus digunakan.
dimana :
Pcu = daya yang diinputkan ke rotor ( Watt )
Ptr = rugi – rugi tembaga rotor ( Watt )
Pmek = daya mekanik dalam bentuk putaran ( Watt )
Efisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian beban
nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh rugi –
rugi mekanik dan rugi – rugi inti. Rugi – rugi tembaga stator tidak dapat diabaikan
sekalipun motor berbeban ringan maupun tanpa beban.
2.5. Klasifikasi Desain Motor Induksi
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam
empat kelas yakni disain A,B,C, dan D.
1. Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan
yang paling tinggi dari semua disain NEMA. Motor ini mampu menangani
Motor ini memiliki torsi start yang normal seperti halnya disain kelas A,
akan tetapi motor ini memberikan arus start yang rendah. Torsi locked
rotor cukup baik untuk menstart berbagai beban yang dijumpai dalam
aplikasi industri. Slip motor ini ≤ 5 %. Effisiensi dan faktor dayanya pada saat berbeban penuh tinggi sehingga disain ini merupakan yang
paling populer. Aplikasinya dapat dijumpai pada pompa, kipas angin/ fan,
dan peralatan – peralatan mesin.
3. Kelas C : memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari
dua disain yang sebelumnya. Aplikasinya dijumpai pada beban – beban
seperti konveyor, mesin penghancur (crusher ), komperessor,dll. Operasi
dari motor ini mendekati kecepatan penuh tanpaoverload dalam jumlah
besar. Arus startnya rendah, slipnya ≤ 5 %.
4. Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan
beban penuhnya rendah. Memiliki nilai slip yang tinggi (5 -13 % ),
sehingga motor ini cocok untuk aplikasi dengan perubahan beban dan
perubahan kecepatan secara mendadak pada motor. Contoh aplikasinya :
elevator, crane, dan ekstraktor. Karakteristik torsi – kecepatannya dapat
dilihat pada gambar 2.5.1.
BAB III
THERMAL TRANSIENT MOTOR INDUKSI PADA KEADAAN BLOCK ROTOR
3.1. Umum
Thermal pada motor induksi atau lebih dikenal sebagai panas pada motor
induksi merupakan bagian penting yang perlu dibahas. Pada motor induksi panas
biasa nya diakibatkan oleh rugi rugi yang terjadi pada sistem dalam motor
induksi. Sumber panas yang paling utama adalah rugi rugi pada konduktor yaitu
berasal dari konduktor yang dialiri arus pada kumparan stator dan pada rotor.
Sedangkan panas yang timbul pada inti, casing stator, udara di permukaan motor
maupun bagian yang lainnya merupakan hasil dari transfer panas yang dihasilkan
rotor maupun belitan stator dengan cara konduksi, konveksi, maupun radiasi. Pada
motor induksi rotor sangkar bagian yang perlu diperhatikan dalam hubungannya
dengan panas adalah bagian stator, karena pada bagian stator terdapat belitan yang
memiliki batas ketahanan terhadap temperatur yang jauh lebih rendah
dibandingkan pada rotor.
Gejala Transien atau peralihan merupakan perubahan nilai tegangan atau
arus maupun keduanya baik sesaat maupun dalam jangka waktu tertentu dari
kondisi steady state. Penyebabnya dapat dari lingkungan atau faktor eksternal
seperti tingkat pembebanan, dan dapat juga dari perlakuan terhadap sistem itu
sendiri atau faktor internal seperti rugi rugi. Dalam hal ini, transien didefinisikan
sebagai perilaku rangkaian diantara keadaan tunak (steady state), yaitu keadaan
3.2. Mekanisme Timbulnya Panas pada Motor Induksi
Mekanisme utama untuk timbulnya panas dalam motor listrik induksi pada
umumnya terbagi dalam empat grup yang terkait secara langsung ke tempat
terjadinya panas tersebut, yaitu Rugi Rugi Joule (Joule Losses), Rugi rugi besi
(iron Losses), Rugi rugi beban sasar (Stray Load Losses), dan Rugi Rugi mekanik
(Mechanical Losses).Masing masing bentuk dari konversi energi dari listrik ke
energi panas dapat diperjelas lebih rinci dibawah ini:
a. Joule Losses ( Rugi Rugi Joule)
Mekanisme ini sesuai dengan konversi dari energi listrik ke energi
panas di media konduksi listrik. Jenis rugi rugi ini secara langsung
berkaitan dengan resistansi konduktor dan perubahan kuadrat arus
,yaitu : Pj = R x I². Konversi energi dari efek joule dalam motor
induksi sangkar tupai terjadi di stator (gulungan tembaga) dan di
batang aluminium sangkar tupai.
b. Iron Losses (Rugi Rugi Besi)
Kerugian ini terjadi karena konversi energi listrik menjadi panas
pada besi. Kerugian ini dapat dibedakan dalam Rugi rugi Hysteresis
dan Arus Eddy. Rugi rugi arus eddy merupakan rugi rugi joule yang
terjadi pada besi karena aliran arus listrik induksi. Rugi rugi histeresis
magnetik dengan medan magnet dan urutan besarnya sesuai dengan
area loop hysteresis dalam induksi listrik versus medan magnet.
Seperti pada gambar 2.3.1.
Gambar 3.2.1. Loop Hysteresis
c. Stray load losses ( Rugi Rugi Beban Sasar)
Rugi rugi beban sasar adalah kerugian kecil dalam operasi
motor listrik dan penjumlahannya sangat sulit. Rugi rugi tersebut
termasuk kerugian akibat efek kulit, frekuensi tinggi, antara lain yang
tidak diketahui atau tidak mudah diukur.
d. Mechanical losses (Rugi rugi Mekanis).
Rugi rugi ini terdiri dari konversi energi mekanik menjadi energi
panas akibat gesekan mekanik dan rugi rugi
viskositas. Termasuk kerugian pada bearings dan rugi rugi kipas
pendingin. Kerugian kipas pendingin adalah karena
energi mekanik yang diperlukan untuk meniup udara di
atas permukaan motor,
termasuk konversi energi kinetik kerja udara, aliran
3.3. Panas Pada Konduktor Yang Dialiri Arus
Untuk dapat memahami kenaikan panas pada belitan stator maka terlebih
dahulu kita memahami hubungan antara arus yang mengalir pada suatu konduktor
dengan panas yang dihasilkan konduktor tersebut.
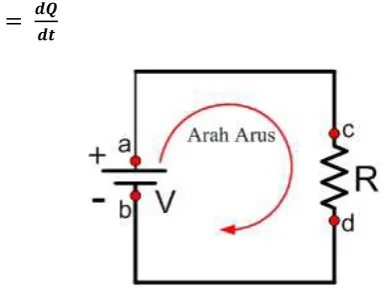
Arus adalah kecepatan muatan yang mengalir melalui suatu permukaan tertentu.
Arus listrik timbul karena adanya aliran elektron. Arus listrik diluar sumbernya
mengalir dari kutub positif ke kutub negatif dan di dalam sumbernya dari kutub
negatif ke kutub positif. Jadi aliran arus listrik adalah kebalikan dari arah aliran
elektron
Persamaan arus dirumuskan pada persamaan 3.3.1. :
�= ∆�
∆� ( Ampere) (3.3.1)
Dimana :
∆� = Muatan yang berubah (Coulomb)
∆� = Perubahan Waktu (sekon)
Jika aliran muatan berubah setiap waktu, maka arus juga akan berubah
setiap waktu, untuk waktu yang sesaat maka persamaan untuk arus menjadi:
�= ��
�� (3.3.2)
Pada Gambar 3.3.1 dapat dilihat bahwa terdapat beda potensial pada
rangkaian tersebut, sehingga menyebabkan timbulnya medan listrik dalam
konduktor maupun tahanan pada rangkaian tersebut, medan listrik tersebut akan
menyebabkan timbulnya gaya listrik. Akibat adanya gaya listrik, maka
elektron-elektron bebas pada konduktor tersebut akan berpindah dari satu atom ke atom
lainnya, dimana elektron bebas tersebut akan bergerak berlawanan arah jarum jam
yaitu dari terminal d menuju c. Jadi dapat dikatakan bahwa arus adalah perubahan
muatan positip dalam setiap waktu akibat elektron-elektron bebas yang berpindah
dari satu atom ke atom lainnya.
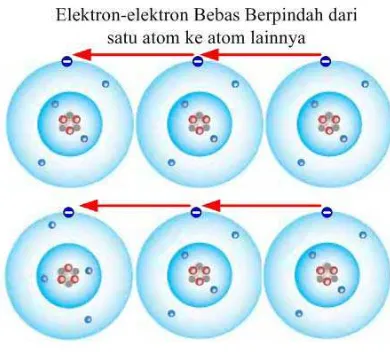
Gambar 3.3.2 menunjukkan elektron-elektron bebas yang bepindah dari
satu atom ke atom lainnya.
Gambar 3.3.2 Elektron-elektron bebas yang berpindah dari satu atom ke atom lainnya
Pada saat elektron-elektron bebas tersebut berpindah ke atom-atom lainnya
maka elektron-elektron tersebut akan mengalami kehilangan sebagian energi
potensial listrik (electrical potential energy). Hal ini terjadi karena pada saat
elektron-elektron bebas tersebut berpindah dari satu atom ke atom yang lainnya
atom-atom tersebut. Hal ini mengakibatkan akan dibangkitkan energi dalam pada
tahanan R seiring dengan meningkatnya gerakan vibrasi atom-atom pada tahanan
R akibat perpindahan elektron-elektron bebas tersebut, yang mana energi tersebut
akan mengakibatkan kenaikan temperatur pada tahanan.
Besar energi potensial listrik yang hilang pada tahanan R dapat diketahui
melalui persamaan 3.3.3:
∆� ∆� =
∆�
∆��=�.� (3.3.3)
Dimana:
I = Arus yang mengalir pada resistor
V = Beda potensial diantara c dan d
Kehilangan sebagian energi potensial listrik pada saat arus melalui tahanan
sama dengan energi yang dalam dibangkitkan pada resistor tersebut. Besarnya
daya yang menunjukkan energi dalam yang dibangkitkan pada resistor tersebut
dirumuskan dalam:
�= �.� (3.3.4)
Karena besarnya tegangan pada resistor sebanding dengan arus yang
mengalir dikali dengan tahanan maka energi dalam yang dibangkitkan pada
resistor menjadi:
�= ��.�= �
� =�.� (Watt) (3.3.5)
Karena energi dalam yang dibangkitkan pada resistor menyebabkan
dibangkitkan pada tahanan tersebut. Untuk selang waktu tertentu besarnya energi
panas yang dibangkitkan pada tahanan tersebut adalah:
�=�.�= ��.�.� Joule (Watt.s) (3.3.6)
Dimana:
H = Energi panas yang dibangkitkan (Joule)
I = arus yang mengalir di tahanan tersebut (Ampere)
t = selang waktu (sekon)
R = Besarnya resistansi dari tahanan tersebut (Ohm)
3.4. Kapasitas Panas dan Panas Spesifik
Kapasitas panas dapat diartikan sebagai energi yang dibutuhkan untuk
menaikkan temperatur dari suatu benda dengan berat tertentu. Besar energi yang
dibutuhkan untuk menaikkan temperatur suatu benda dengan massa tertentu
dirumuskan dengan:
�=�.∆� (Joule) (3.4.1)
Dimana:
Q = Energi yang dibutuhkan untuk menaikkan temperatur (Joule)
C = Kapasitas Panas (Joule/ºC)
ΔT = Perubahan suhu (ºC)
Besarnya kapasitas panas bergantung terhadap panas spesifik dan berat
benda tersebut. Jadi besarnya energi yang diperlukan untuk menaikkan temperatur
suatu benda dengan berat tertentu dapat diketahui dengan persamaan 3.4.2:
�=�.∆� = �.�.∆� (Joule) (3.4.2)
Q = Energi yang dibutuhkan untuk menaikkan temperatur (Joule)
m = Berat benda (kg)
ΔT = Perubahan suhu (ºC)
c = panas spesifik (Joule/kg.ºC)
Dari Persamaan 3.3.6 dan 3.4.2 dapat diketahui bahwa besarnya energi
panas pada suatu konduktor yang dialiri arus sebanding dengan energi panas (H)
yang dibutuhkan untuk menaikkan temperatur suatu benda (Q), yang dapat
dirumuskan dengan persamaan 3.4.3 :
��.�.�= �.�.�� (3.4.3)
3.5. Panas Pada Motor Induksi Rotor Sangkar
Pada motor induksi rotor sangkar, panas yang biasanya ditinjau adalah
bagian stator. Hal ini disebabkan karena pada bagian stator memiliki batasan
terhadap temperatur yang lebih rendah dibandingkan rotor.
Kenaikan panas pada motor induksi dipengaruhi oleh faktor-faktor yaitu:
a. Jenis pendinginan.
b. Transfer panas.
c. Temperatur lingkungan tempat motor berada.
d. Dan beban yang dipikul motor yang mana beban tersebut berpengaruh terhadap
3.5.1. Jenis Pendinginan
Hampir secara keseluruhan jenis pendinginan motor induksi menggunakan
pendingin udara dengan metode pendinginan udara tidak langsung atau yang biasa
disebut indirect air cooling. Disebut pendinginan tidak langsung karena
konduktor pada belitan tidak berhubungan langsung dengan udara pendingin yang
dikarenakan kehadiran isolasi pada belitan.
3.5.2. Transfer Panas Pada motor Induksi
Panas yang dihasilkan oleh belitan stator tidak akan tinggal pada belitan,
akan tetapi panas yang dihasilkan akan di buang (didisipasikan) ke bagian-bagian
lain dari mesin tersebut, salah satu proses pembuangan panas tersebut adalah
melalui transfer panas. Transfer panas pada motor induksi bergantung kepada
besarnya panas yang dihasilkan belitan, konstruksi dari motor, dan metode
pendinginan motor.
Transfer panas pada motor induksi dibedakan menjadi tiga bagian yaitu konduksi,
konveksi dan radiasi.
a. Konduksi
Pada konduksi, energi panas mengalir dari belitan stator ke isolasi slot
kemudian ke inti stator. Demikian juga pada rotor, panas mengalir dari konduktor
rotor ke inti rotor dan kemudian ke tangkai rotor. Gambar 3.5.2 menunjukkan
proses konduksi pada sebuah slot konduktor pada motor induksi.
Gambar 3.5.2 Konduksi pada sebuah slot konduktor pada motor induksi.
Besarnya energi panas yang ditransfer pada proses konduksi sesuai dengan
persamaan 3.5.1:
Q = q. l. A (Joule) (3.5.1) Dimana:
Q = panas yang dihasilkan per unit volume (W/m3)
A = luas area slot (m2)
Untuk tinjauan satu slot seperti pada Gambar 3.5.2 maka besarnya nilai q dapat
ditentukan dengan persamaan 3.5.2:
�= −�.����Ѳ� (3.5.2)
sedangkan untuk secara keseluruhan slot maka besarnya nilai q ditentukan dengan
persamaan 3.5.3:
�=�(−�.�Ѳ) (3.5.3)
Dimana:
K = konduktivitas thermal (W/m.ºC)
�Ѳ = Ѳ1- Ѳ2 (ºC)
Ѳ1 = temperatur belitan di dalam slot (ºC)
Ѳ2 = temperatur inti stator (ºC)
�Ѳ = perbedaan temperatur antara belitan di dalam slot dengan inti stator.
b. Konveksi
Pada konveksi, energi panas mengalir antara permukaan rangka stator
dengan udara sekitar motor. Panas yang di transfer melalui konduksi dapat
dirumuskan pada persamaan 3.5.4:
�����= �.�.�Ѳ (Watt) (3.5.4)
Dimana:
Qconv = besarnya Energi panas yang di transfer (Watt)
�Ѳ = perbedaan Temperatur antara permukaan rangka stator denganudara
A = luas permukaan yang berhubungan dengan udara (m2)
H = koefisien konveksi panas (W/m2. ºC)
c. Radiasi
Pada radiasi, transfer energi panas terjadi antara bagian motor yang
menghasilkan panas dengan benda disekeliling motor yang menyerap panas.
Energi panas yang diradiasikan dari stator ke benda disekeliling motor yang
menyerap panas dirumuskan dengan persamaan 3.5.5:
����= �.�.�.����−���� (Watt) (3.5.5)
Dimana:
� = Konstanta Boltzman = 5,67. 10−8�/(�2.�4) � = emissivitas
A = luas daerah radiasi
3.5.3. Temperatur Lingkungan Pengoperasian Motor Induksi
Temperatur lingkungan merupakan sesuatu hal yang perlu diperhatikan,
karena itu mempengaruhi disisipasi panas (pembuangan panas) yang juga
mempengaruhi temperatur motor.
Sesuai dengan standar IEC 60034-1, hampir secara keseluruhan motor di
rancang bekerja dengan temperatur lingkungan yang tidak melebihi 40ºC.
Temperatur lingkungan yang tinggi akan menyebabkan panas pada motor induksi
lebih besar dibandingkan dengan pada saat motor induksi bekerja pada temperatur
Persamaan 3.5.4 menunjukkan bahwa apabila temperatur lingkungan
motor semakin tinggi maka besar Δθ akan semakin kecil, sehingga panas yang
didisipasikan (dibuang) melalui konveksi akan semakin kecil, sehingga panas
yang tinggal di dalam belitan stator akan semakin besar.
3.5.4. Isolasi pada motor induksi
Fungsi utama dari isolasi adalah memisahkan komponen yang memiliki
potensial listrik yang berbeda. Untuk lebih jauhnya, isolasi berguna untuk
meningkatkan kemampuan dari struktur belitan, mempengaruhi panas antara
belitan dengan lingkungan sekitar, dan juga melindungi belitan dari tekanan luar
seperti debu, kelembapan dan reaksi kimia.
Secara umum isolasi pada motor induksi dibagi dua kategori utama yaitu
isolasi groundwall dan isolasi konduktor. Fungsi isolasi groundwall adalah
memisahkan komponen-komponen motor sehingga tidak terjadi hubungan
galvanis antara satu sama lainnya.
Sebagai contoh isolasi groundwall digunakan untuk memisahkan belitan
stator dengan inti stator. Sedangkan isolasi konduktor digunakan untuk
memisahkan masing-masing konduktor pada belitan.
Gambar 3.5.3 menunjukkan konduktor dari belitan stator pada sebuah slot yang
Gambar 3.5.3 Belitan pada sebuah slot yang berisolasi
Isolasi konduktor merupakan bagian yang paling mendapat perhatian dari
keseluruhan isolasi pada motor induksi. Hal ini dikarenakan isolasi ini merupakan
bagian yang bersentuhan langsung dengan sumber panas yaitu konduktor stator
dan merupakan bagian isolasi yang paling tipis.
Isolasi konduktor biasanya berupa lapisan yang terbuat dari bahan
thermoset atau thermoplastik seperti imide, polyester with
polyamide-imide ataupun polyamide-imide polymer.
Isolasi belitan stator dapat dibagi berdasarkan kemampuan untuk bertahan
dalam temperatur tinggi tanpa menimbulkan kerusakan. Tabel 3.5.1 menunjukkan
kelas isolasi motor berdasarkan standard IEC.
Tabel 3.5.1. Kelas Isolasi motor induksi berdasarkan standar IEC
Kelas Isolasi Batas Temperatur
A 105 ºC
B 130 ºC
F 155 ºC
Batas temperatur pada tabel merupakan temperatur maksimal dari isolasi belitan
stator dengan umur kerja 20.000 jam. Artinya isolasi belitan akan dapat bertahan
selama 20.000 jam apabila temperatur belitan sama dengan temperatur yang ada
pada tabel. Selang waktu tersebut merupakan durasi yang singkat, hal ini
dikarenakan motor dirancang untuk bekerja dengan waktu yang lebih lama
sehingga dalam pengoperasiannya, motor dijaga untuk bekerja dibawah
temperatur tersebut.
3.5.5. Pengaruh Panas Terhadap isolasi motor
Energi panas menimbulkan kenaikan temperatur, sehingga apabila energi
panas yang dihasilkan dari belitan stator besar maka akan menimbulkan kenaikan
temperatur yang tinggi
Salah satu penyebab terjadinya kerusakan pada belitan stator adalah karena
temperatur belitan yang tinggi. Motor yang dioperasikan dengan temperatur tinggi
akan menimbulkan tekanan termal yang tinggi yang dapat mengakibatkan
berkurangnya umur dari isolasi belitan stator.
Pengurangan umur isolasi akibat panas (Thermal Aging) bergantung
kepada material isolasi dan lingkungan tempat pengoperasian.
Pada motor induksi yang berpendingin udara dengan isolasi terbuat dari
bahan thermoset atau thermoplastik, pengurangan umur isolasai akibat panas pada
dasarnya disebabkan oleh reaksi oksidasi kimia. Hal ini dikarenakan, pada
temperatur yang cukup tinggi, ikatan kimia bahan isolasi dengan komponen
rusak disebabkan adanya getaran (vibrasi) yang disebakan panas, peristiwa ini
disebut juga dengan pemotongan ikatan kimia.
Ketika pemotongan ikatan kimia terjadi, maka oksigen akan mengisi
ikatan kimia yang rusak, sehingga menyebabkan rantai polimer penyusun isolasi
akan lebih pendek dan lebih lemah. Secara makro maka isolasi akan lebih rapuh
dan daya mekanis yang lebih kecil. Untuk selang waktu yang lama atau untuk
temperatur yang sangat tinggi maka dapat menyebabkan isolasi menjadi meleleh
ataupun terbakar.
Umur isolasi motor induksi akibat temperatur tinggi dapat ditentukan
dengan menggunakan persamaan Arrhenius seperti ditunjukka pada persamaan
3.5.6:
�=�.����.� (3.5.6)
Dimana:
L = Umur isolasi (jam)
A = konstanta
Ea = energy aktivasi
T = Temperatur absolut (ºC)
R = Konstanta gas universal (8,314 x 10-3kJ mol-1K-1)
Persamaan 3.5.6 hanya berlaku apabila isolasi motor dioperasikan pada
temperatur tertentu yang cukup tinggi yaitu diatas batas temperatur kelas isolasi,
apabila dioperasikan dibawah temperatur tersebut maka pengurangan umur isolasi
(Thermal Aging) tidak akan terjadi karena getaran (vibrasi) akibat panas pada
Gambar 3.5.4 menunjukkan kurva umur isolasi motor induksi untuk
masing-masing kelas apabila dioperasikan diatas batas temperatur kelas isolasi.
Gambar 3.5.4 Kurva umur isolasi motor induksi untuk masing-masing kelas apabila dioperasikan
diatas batas temperatur kelas isolasi.
Batas temperatur dari masing-masing kelas isolasi pada Tabel 3.5.1
merupakan batas temperatur yang dapat menyebabkan terjadinya pengurangan
umur (thermal aging) pada isolasi motor. Sehingga apabila temperatur belitan
melebihi batas temperatur pada tabel maka akan menyebabkan terjadinya
pengurangan umur dari isolasi belitan stator.
Berdasarkan standar IEC 60034-18-1 batas temperatur maksimal yang
diijinkan pada motor induksi yang tidak menyebabkan pengurangan umur secara
cepat sehingga isolasi stator tidak mengalami kerusakan dapat dilihat pada Tabel
Tabel 3.5.2 Batas temperatur maksimal yang diijinkan pada motor induksi
berdasarkan standar
IEC 60034-18-1
Kelas Isolasi Batas Temperatur Maksimal
A 170ºC - 180 ºC
B 195 ºC - 205 ºC
F 220 ºC - 230 ºC
H 245 ºC - 255 ºC
3.5.6. Kenaikan Panas Pada Motor Induksi Rotor Sangkar
Pada saat motor induksi beroperasi dengan besar arus nominal sampai
dengan dua kali arus nominal, maka panas yang dihasilkan pada motor induksi
dipengaruhi banyak hal yaitu transfer panas, jenis pendinginan, dan temperatur
lingkungan. Hal ini dikarenakan arus yang mengalir pada belitan stator tidak
menghasilkan panas yang besar, selain itu sebagian panas yang dibuang
(didisipasikan) melalui transfer panas masih sebanding dengan panas yang
dihasilkan sehingga belitan tidak akan mencapai temperatur yang tinggi.
Akan tetapi apabila motor induksi beroperasi diatas dua kali arus nominal,
maka panas yang dihasilkan dapat naik secara cepat, hal ini disebabkan panas
yang dihasilkan lebih besar dibandingkan pada saat dialiri arus nominal selain itu
panas yang didisipasikan tidak sebanding dengan panas yang dihasilkan sehingga
apabila berlangsung secara terus menerus dapat menyebabkan temperatur belitan
menjadi tinggi.
Besarnya energi panas total pada stator motor induksi merupakan
panas yang dibuang melalui transfer panas. Sehingga panas pada belitan stator
dirumuskan dengan persamaan 3.5.7.
������� = (�.��.�.�)− ��������� (3.5.7)
Dimana:
Qtotal = Panas belitan stator (Watt)
I = Arus yang mengalir pada belitan stator (Ampere)
R = Tahanan belitan stator per phasa (Ohm)
t = selang waktu (sekon)
Qtransfer = Total Panas yang ditransfer (Watt)
Karena belitan stator merupakan konduktor yang memiliki berat, maka
besarnya panas pada belitan stator yang dihubungkan dengan berat belitan stator
dapat dirumuskan dengan persamaan 3.5.8 yaitu:
������� =�.�.∆� (3.5.8)
Dimana:
Qtotal = Panas belitan stator (Watt)
W = berat total belitan stator (kg)
δ = Panas spesifik (spesific heat) material belitan stator ataupun rotor
(Watt.s/Kg. ºC)
ΔT = Perubahan temperatur (kenaikan temperatur) (ºC)
Dari persamaan 3.5.8 dapat dihitung kenaikan temperatur pada belitan stator
apabila dialiri arus untuk selang waktu tertentu, yang dirumuskan dengan
∆�= ��������
.� (ºC) (3.5.9)
Apabila energi panas yang dihasilkan besar, maka akan menghasilkan
kenaikan temperatur yang besar. Temperatur belitan yang melebihi batasan
temperatur kelas isolasi motor, akan menyebabkan berkurangnya umur dari isolasi
belitan tersebut. Selain itu temperatur belitan yang tinggi dapat menyebabkan
kerusakan permanen pada isolasi belitan stator.
3.5.7. Panas Pada Motor Pada Saat Starting
Terlepas dari metode starting yang digunakan atau beban yang dipikul
motor, apabila motor di start maka akan menimbulkan panas baik di rotor maupun
stator. Semakin lama waktu start maka akan semakin besar panas yang
ditimbulkan.
Panas pada stator pada saat starting dapat dirumuskan sebagai berikut:
�= ����.�.�� (Watt.s) (3.5.10)
Atau :
�= �.� .� (Watt.s) (3.5.11)
Dengan mengasumsikan persamaan 3.5.10 ke 3.5.11 diperoleh:
����.�.�� = �.� .�
Besarnya kenaikan suhu pada saat starting adalah:
�= �����.�.��
.� ((ºC) (3.5.12)
Dimana:
W = Berat belitan stator ataupun rotor (Kg)
Δ = Panas spesifik (spesific heat) material belitan stator ataupun rotor
� = Kenaikan Temperatur (ºC)
R = Tahanan belitan stator per phasa (Ohm)
�� = Lamanya waktu starting (sekon)
3.5.8. Kenaikan Panas Pada Saat Block Rotor
Pada saat motor induksi berada dalam keadaan block rotor maka arus yang
disuply ke motor induksi dapat mencapai lima kali arus nominal. Dalam keadaan
block rotor maka keseluruhan daya yang disuply ke motor akan diubah menjadi
panas, hal ini akan menyebabkan kenaikan temperatur yang sangat cepat
dibandingkan pada saat motor bekerja pada beban penuh. Sehingga komponen-
komponen motor seperti isolasi, konduktor belitan stator, inti, konduktor rotor
akan mengalami kenaikan temperatur yang sangat cepat. Karena kenaikan
temperatur berlangsung cepat, sehingga dalam waktu tertentu dapat menyebabkan
kerusakan seperti:
a. Memperpendek umur isolasi.
b. Merusak isolasi belitan.
c. Merusak sambungan antar konduktor pada belitan.
d. Menyebabkan kumparan stator terbakar.
Besarnya daya masukan pada motor pada saat block rotor bergantung
kepada tegangan supply, dan rancangan parameter dari motor tersebut.
Panas pada stator pada saat terjadi block rotor dapat dirumuskan dengan
persamaan 3.5.13:
Dimana:
Hbr = Panas yang ditimbulkan pada saat block rotor (Watt)
��� = Arus block rotor (Ampere)
�1 = Tahanan belitan stator per phasa dan Tahanan Rotor (Ohm)
Untuk selang waktu tertentu maka hubungan panas pada saat block rotor dengan
energi yang dibutuhkan untuk menaikkan panas dapat dilihat pada persamaan
3.5.14:
���.���= �.� (3.5.14)
dimana :
��� = Lamanya block rotor (sekon)
C = Kapasitas panas dari belitan stator (Watt.s/m.ºC)
= W.δ
δ = Panas spesifik dari belitan (Watt.s/kg.m ºC)
W = Berat belitan stator (kg)
θ = Kenaikan Temperatur (ºC)
Dari Persamaan 3.5.13 dan 3.5.14 dapat diketahui lamanya waktu yang
dibutuhkan untuk menyebabkan kenaikan temperatur dengan nilai tertentu, yaitu
pada Persamaan 3.5.15
���= (�Ѳ��.�)�..��� (sekon) (3.5.15)
Dalam penentuan lamanya waktu block rotor yang aman yang perlu
diperhatikan adalah kelas isolasi motor, tegangan supply, temperatur belitan
sebelum terjadi block rotor, dan parameter motor.
Besarnya tegangan supply dan parameter motor menentukan besarnya arus yang
mengalir pada saat block rotor. Sedangkan kelas isolasi dan temperatur belitan
sebelum terjadi block rotor menentukan kenaikan temperatur yang diijinkan.
Untuk menentukan panas spesifik dari belitan, bergantung kepada material
dari konduktor belitan, hampir secara keseluruhan motor menggunakan belitan
terbuat dari tembaga sehingga nilai panas spesifik (δ) adalah: 380 Watt.s/kg.m ºC.
Karena lamanya block rotor yang aman berlangsung dalam waktu yang
singkat maka menyebabkan panas yang didisipasikan terlalu kecil. Hal tersebut
mengakibatkan panas yang dihasilkan akibat block rotor hampir secara
keseluruhan digunakan untuk menaikkan temperatur pada belitan itu sendiri.
Sehingga panas yang didisipasikan motor induksi pada saat block rotor adalah
sebesar 15% dari panas yang dihasilkan belitan stator, hal ini berdasarkan
ketentuan IEC 60079-7 yang menyatakan bahwa panas yang digunakan untuk
menaikkan temperatur belitan stator pada saat motor induksi dalam keadaan block
rotor adalah 85% dari panas yang dihasilkan arus yang mengalir pada belitan
stator. Sehingga lamanya waktu block rotor yang aman dapat ditentukan dengan
menggunakan persamaan 3.5.16 yaitu:
���= (�Ѳ��.�)�..���.
�
�,�� (sekon) (3.5.16)
dimana:
θ = Kenaikan Temperatur Yang diijinkan (ºC)
δ = Panas spesifik dari belitan (Watt.s/kg.m ºC)
R1 = Tahanan belitan stator per phasa (Ohm)
Ibr = Arus pada saat block rotor
tbr = Lamanya Waktu block rotor yang aman
3.6. Parameter Motor Induksi Tiga Fasa
Data yang diperlukan untuk menghitung performansi dari suatu motor induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan,
dan pengukuran tahanan dc lilitan stator.
3.6.1. Pengujian Tahanan Stator
Pengujian ini digunakan untuk mengetahui nilai parameter resistansi stator ( primer ) R1. Pada pengujian ini kumparan stator dialiri arus searah, sehingga
suhunya mencapai suatu nilai yang sama jika motor induksi beroperasi pada
kondisi operasi normal ( resistansi kumparan merupakan fungsi suhu ).
Gambar 3.6.1. Rangkaian Pengujian Tahanan Stator Arus Searah Motor Induksi
Pada percobaan ini, jika kumparan stator terhubung bintang (gambar 3.6.1a) maka arus akan mengalir melewati dua kumparan dengan resistansi
sebesar 2R1, sehingga :
AS AS
I V
atau
Sedangkan jika terhubung segitiga (gambar 3.6.1b), maka arus akan
mengalir melewati ketiga kumparan tersebut yang besarnya secara ekivalen
terlukis pada gambar berikut, dengan resistansi total :
1
Nilai R1 yang didapat hanya merupakan nilai pendekatan, karena pada
kondisi operasi normal, motor induksi diberikan pasokan tegangan arus bolak –
balik yang dapat menimbulkan efek kulit ( skin effect ) yang mempengaruhi
besarnya nilai R1.
3.6.2. Pengujian Block Rotor
Pengujian ini pada prinsipnya adalah seperti pengujian hubung – singkat pada transformator. Motor induksi dihubungkan dengan sumber daya listrik, serta
P1
Gambar 3.6.2. Rangkaian Rotor Ditahan Motor Induksi di mana :
fr = frekuensi rotor; fj = frekuensi jaringan listrik; fuji = frekunsi uji
Pada pengujian ini, rotor ditahan agar tidak berputar dan pada saat itu
nilai–nilai pada instrumen ukur dicatat. Pada pengujian ini ketika setelah
frekuensi dan tegangan diatur, serta rotor ditahan, arus yang mengalir pada motor
harus dengan segera disetel pada nilai nominalnya, data daya masukan, tegangan
dan arus yang terukur harus dengan segera dicatat sebelum rotor menjadi sangat
panas. Sumber daya yang digunakan adalah sumber daya yang tagangan dan
frekuensinya dapat disetel atau diatur ( adjustable ).
IRT ( jala – jala ) =
Adapun nilai impedansi per fasa pada percobaan ini sebesar :
XRT' = X1' + X2' (3.6.7)
di mana :
R1 dan R2 adalah besarnya resistansi kumparan stator dan kumparan rotor.
X'1 dan X'2 adalah besarnya reaktansi kumparan stator dan rotor pada frekuensi
uji.
Sedangkan besarnya reaktansi kumparan stator dan rotor pada kondisi
operasi normal adalah :
XRT =
Tabel 3.6.1. Standar besarnya reaktansi berbagai jenis desain rotor. Disain Motor X1 X2
Tabel di atas didasarkan pada percobaan yang telah dilakukan bertahun – tahun
lamanya dan dijadikan standar NEMA (National Electrical Manufacturers
Association ).
Pengujian ini untuk mengukur rugi – rugi putaran dan arus magnetisasi. Pada keadaan beban nol, beban yang dipikul hanyalah rugi – rugi angin dan
gesekan. Adapun rangkaian pengujian beban nol adalah sebagai berikut :
P1
Gambar 3.6.3. Rangkaian pengujian beban nol motor induksi
Dari data instrumen ukur dapat ditentukan parameter – parameter ( per fasa ) :
Zbn =
Reaktansi magnetisasi ( Xm ) dapat dicari jika reaktansi primer X1 diketahui.
Ibn ( jala – jala ) =
Slip yang terjadi umumnya sangat kecil ( ≤ 0,001 ), sehingga :
R2
maka I2 pada percobaan ini diabaikan.
R2
Rugi rotor ini dianggap sebagai rugi angin dan gesekan, sedangkan rugi
Pts = I12 . R1 .………..………...( 3.6.11
)
di mana I1 di sini sama dengan Ibn ( fasa ) dan R1 dicari lewat pengujian tahanan
stator arus searah.
Dan persamaan daya :
Pin( bn ) = Pts + .………....………...(
3.6.12)
Prot = Pi + Pa & g + rugi lain – lain……...…………...
………..(3.6.13)
di mana :
Prot = daya yang hilang akibat adanya putaran ( Watt ).
Pi = rugi inti ( Watt ).
Pa & g = rugi angin dan gesekan ( Watt )
BAB IV