FRACTIONAL PROGRAMMING
SKRIPSI
LUSI VICTORIA LUMBAN GAOL
060803043
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
LUSI VICTORIA L. GAOL
060803043
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PROSEDUR FUZZY GOAL PROGRAMMING UNTUK MASALAH BILEVEL MULTIOBJEKTIF
LINEAR FRACTIONAL PROGRAMMING
Kategori : SKRIPSI
Nama : LUSI VICTORIA L.GAOL Nomor Induk Mahasiswa : 060803043
Program Studi : SARJANA (S1) MATEMATIKA Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Maret 2011 Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs. Liling Perangin-angin, M.Si Drs. Marwan Harahap, M.Eng NIP. 19470714 198403 1 001 NIP. 19461225 197403 1 001
Diketahui/ Disetujui oleh
Departemen Matematika FMIPA USU Ketua,
Prof. Dr. Tulus, M.Si
PERNYATAAN
PROSEDUR FUZZY GOAL PROGRAMMING UNTUK MASALAH BILEVEL MULTIOBJEKTIF LINEAR FRACTIONAL PROGRAMMING
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan,
PENGHARGAAN
Dengan segala kerendahan hati penulis memanjatkan puji dan syukur kepada Tuhan Yang Maha Esa atas kasih, rahmat, dan perlindunganNya, yang memampukan penulis dalam mengerjakan dan menyelesaikan penulisan skripsi ini.
semangat dalam perkuliahan dan penulisan skripsi ini. Terima kasih juga kepada Kak Holong, Tina dan Nelly serta adik Simon buat doa nasehat, masukan dan dukungannya selama perkuliahan sampai penyelesaian skripsi ini. Penulis juga berterimakasih untuk Quasimodogeniti dan adek kelompok kecil untuk doa dan dukungannya. Semoga Tuhan membalas segala kebaikan yang sudah diberikan, dan biarlah kasih dan kemurahan Tuhan yang senantiasa menyertai kita dan biarlah Tuhan berkenan atas penulisan skripsi ini.
Penulis,
ABSTRAK
ABSTRACT
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak vi
Abstract vii
Daftar Isi viii
Daftar Tabel xi
Daftar Gambar xii
Bab 1 Pendahuluan 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 3
1.3 Tinjauan Pustaka 3
1.4 Tujuan Penelitian 5
1.5 Kontribusi Penelitian 5
1.6 Metode Penelitian 6
Bab 2 Landasan Teori 7
2.1.1 Fungsi Keanggotaan 10
2.1.2 Bilangan Fuzzy Triangular 11
2.1.3 Himpunan Fuzzy Trapezoidal 11
2.2 Goal Programming 12
2.2.1 Konsep Dasar dari Goal Programming 12
2.3 Model Fuzzy Goal Programming 17
2.4 Bilevel Programming 18
2.5 Optimisasi Multi-Objektif 19
2.5.1 Masalah Optimasi Multi-Objektif 20 2.5.1.1 Masalah Optimasi Multi-Objektif Linear dan
Nonlinear 21
2.5.1.2 Masalah Optimasi Konvex dan Nonkonvex 22
2.6 Linear Fractional Programming 24
2.7 Pemrograman Bilevel Linear Multiobjektif Fraksional Linear 25
Bab 3 Pembahasan 27
3.1 Perumusan Fuzzy Goal Programming Bilevel Multiobjective
Linear Fractional Programming (BL-MOLFP) 27
3.2 Konstruksi Fungsi Keanggotaan 27
3.3 Pendekatan Fuzzy Goal Programming 30
3.4 Linearisasi dari Tujuan Keanggotaan 32 3.5 Model Fuzzy Goal Programming untuk Masalah Multi-Objektif
Linear Fractional Programming 34
3.6 Algoritma Fuzzy Goal Programming untuk Masalah Bi-Level
Multi-Objektif Linear Fractional Programming 35
Bab 4 Kesimpulan dan Saran 40
4.1 Kesimpulan 40
4.2 Saran 41
Daftar Pustaka 42
Lampiran 44
DAFTAR TABEL
Halaman Tabel 3.1 Koefisien , , , untuk tujuan tingkat 36
DAFTAR GAMBAR
Halaman
Gambar 2.1 Bilangan Fuzzy Triangular 11
Gambar 2.2 Bilangan Fuzzy Trapezoidal 12
Gambar 2.3 Perwakilan Hubungan dari Ruang Variable Keputusan dan
Ruang Tujuan 22
Gambar 2.4 Ilustrasi Fungsi Konvex 23
ABSTRAK
ABSTRACT
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Penggunaan konsep fungsi keanggotaan (f ) teori himpunan fuzzy pada masalah BLMP untuk mencari keputusan yang memenuhi pertama kali diperkenalkan oleh Lai (1996). Setelah itu, konsep solusi Lai diperluas oleh Shih et al. (1996). Konsep dasar pendekatan pemrograman fuzzy /fuzzy programming (FP) sama, karena mengimplikasikan bahwa SLDM mengoptimalkan fungsi tujuannya, mengambil goal atau preferensi FLDM menjadi pertimbangan. Dalam proses keputusan, mengingat fungsi keanggotaan fuzzy goal untuk variabel-variabel keputusan dari FLDM, SLDM menyelesaikan masalah FP dengan kendala pada keseluruhan tingkat kepuasan FLDM tersebut. Jika solusi yang diajukan tidak memuaskan bagi FLDM, pencarian solusi dilanjutkan dengan mendefinisikan ulang fungsi keanggotaan yang ditimbulkan sampai solusi yang memuaskan tercapai.
Kesulitan utama yang muncul dengan pendekatan FP dari Shih et al.(1996) adalah bahwa ada kemungkinan penolakan solusi lagi dan lagi oleh FLDM dan evaluasi ulang masalah, diperlukan berulang kali untuk mencapai keputusan yang memuaskan, dimana tujuan para pengambil keputusan (DMs) bertentangan. Bahkan ketidaksesuaian antara fuzzy goal dari tujuan dan variabel keputusan mungkin muncul. Hal ini membuat proses solusi panjang. Untuk mengatasi situasi yang tidak diinginkan di atas, teknik pemrograman fuzzy goal (FGP) yang diperkenalkan oleh Mohamed (1997) diperluas dalam artikel ini pada masalah BL – MOLFP.
Untuk merumuskan model FGP dari masalah BL -MOLFP, fuzzy goal dari tujuan dicari dengan menentukan solusi optimal individu. Fuzzy goal kemudian ditandai dengan fungsi keanggotaan asosiasi yang ditransformasikan kedalam fuzzy flexible membership goal dengan cara memperkenalkan variabel deviasi di atas dan di bawah dan menugaskan nilai keanggotaan tertinggi sebagai level aspirasi untuk masing-masing fuzzy goal. Untuk mendapatkan fungsi keanggotaan vektor keputusan yang dikontrol oleh FLDM, solusi optimal masalah MOLFP level pertama ditentukan secara terpisah.
untuk menyelesaikan masalah secara efisien dengan menggunakan metodologi linear goal programming (LGP).
1.2 Permusan Masalah
Permasalahan dalam tulisan ini adalah meminimumkan kemungkinan adanya penolakan solusi lagi dan lagi oleh pengambil keputusan tingkat pertama/first level decision making (FLDM) dan evaluasi ulang dari masalah diperlukan berkali-kali untuk mencapai keputusan yang memuaskan, dimana tujuan para pengambil keputusan/decision makers (DMs) bertentangan dan adanya ketidaksesuaian antara fuzzy goal dari tujuan dan variabel keputusan.
1.3 Tinjauan Pustaka
Dalam kehidupan sehari – hari kita tidak jarang menemui suatu permasalahan yang mempunyai tujuan ganda, terlebih lagi dalam dunia usaha yang makin kompleks seperti saat ini. Sering sekali perusahaan mempunyai banyak tujuan sehingga harus mencari solusi bagaimana perusahaan mencapai semuanya secara optimal pada waktu bersamaan berdasarkan kendala-kendala yang dimiliki perusahaan [10].
ditetapkan. Dengan analisis goal programming maka kita mencoba untuk memuaskan target yang telah kita tentukan menurut skala prioritasnya masing-masing [11].
Fuzzy goal programming didasari pada teori fuzzy set, biasanya menggambarkan goal yang tidak pasti. Tujuan-tujuan ini biasanya diasosiasikan dengan fungsi tujuan dan menggambarkan bobot dan rentang dari peluang keberhasilan tujuan [7].
Aplikasi dari fuzzy set ke dalam lingkungan pengambilan keputusan untuk bagian paling banyak terdiri dari ekstensi dari ”fuzzyfikasi” dari teori klasik pengambilan keputusan. Kefuzzy-an dapat diperkenalkan pada beberapa point dalam model yang ada dari pengambilan keputusan [6].
Sebuah sekumpulan fuzzy (A) dalam sebuah ruangan titik-titik X = {x} ialah sebuah kelas kejadian (class of events) dengan sebuah mutu keanggotaan kontinu (grade of membership) dan ditandai oleh sebuah fungsi keanggaotaan �( ) yang
Kendala Axb,x0, dimana x, c, dan d adalah vektor n x 1, b adalah vektor m x 1, 1 1
,d
c merupakan transpose dari vektor c dan d yang adalah matriks m x n, dan
, adalah konstanta skalar.
1.4 Tujuan Penelitian
Tujuan penelitian ini adalah untuk meminimumkan kekecewaan tingkat kepuasan kelompok pengambil keputusan dalam mencapai kesatuan derajat tertinggi dari masing – masing fungsi keanggotaan tujuan dengan meminimalkan variabel deviasinya sehingga diperoleh solusi yang paling optimal dan meminimumkan adanya pertentangan dari tujuan para pengambil keputusan.
1.5 Kontribusi Penelitian
1.6 Metode Penelitian
Metode penelitian yang digunakan dalam penelitian ini adalah:
1. Melakukan study pendekatan yang berhubungan dengan fuzzy set, goal programming, fuzzy goal programming, bi-level programming, multi-objektif, linear fractional programming
2. Menetapkan tujuan untuk semua fungsi objektif dalam dua level.
3. Menimbulkan fungsi keanggotaan untuk masing-masing tujuan di level pertama.
4. Merumuskan model FGP untuk masalah MOLFP level pertama. 5. Menyelesaikan model untuk mendapatkan solusi optimal.
6. Mengatur nilai toleransi maksimum positif dan negative pada vektor keputusan 7. Menimbulkan fungsi keanggotaan untuk vektor keputusan.
8. Menimbulkan fungsi keanggotaan untuk masing-masing fungsi tujuan di tingkat kedua.
9. Merumuskan model pendekatan FGP untuk masalah BL-MOLFP.
10.Menyelesaikan model untuk mendapatkan solusi yang memuaskan dari masalah BL-MOLFP.
BAB 2
Landasan Teori
2.1. Teori Himpunan Fuzzy
Definisi : Andaikan X titik-titik ruang (objek), dengan elemen umum dari X yang dinotasikan dengan x, X = { x } [16].
Himpunan fuzzy adalah himpunan yang unsur-unsurnya memiliki derajat keanggotaan. Himpunan fuzzy diperkenalkan oleh Lutfih A. Zadeh (1965) sebagai perluasan dari pengertian himpunan klasik. Pada teori himpunan klasik, keanggotaan dari unsur-unsur dalam himpunan dinilai dalam hal biner menurut kondisi bivalen-elemen baik termasuk atau tidak termasuk dalam himpunan. Sebaliknya, teori himpunan fuzzy memungkinkan penilaian bertahap dari keanggotaan elemen dalam himpunan, ini digambarkan dengan bantuan sebuah fungsi keanggotaan yang dinilai dalam unit nyata interval [0,1].
yang dikenakan pada adalah 0. Nilai fungsi yang dikenakan pada sebarang anggota himpunan A dikatakan sebagai nilai keanggotaan. Jadi pada himpunan crisp, hanya mempunyai 2 nilai keanggotaan yaitu 0 atau 1. Tetapi pada himpunan fuzzy, nilai keanggotaan dari anggota-anggotanya tidak hanya 0 dan 1 saja. Tapi berada pada interval tertutup [0,1]. Dengan kata lain himpunan A dikatakan fuzzy selama fungsi
∶ � → 0,1 .
Himpunan Fuzzy didasarkan pada gagasan untuk memperluas jangkauan fungsi karakteristik sedemikian hingga fungsi tersebut akan mencakup bilangan real pada interval [0,1]. Nilai keanggotaannya menunjukkan bahwa suatu item dalam semesta pembicaraan tidak hanya berada pada 0 atau 1, namun juga nilai yang terletak diantaranya. Dengan kata lain, nilai kebenaran suatu item tidak hanya bernilai benar atau salah. Nilai 0 menunjukkan salah, nilai 1 menunjukkan benar, dan masih ada nilai-nilai yang terletak antara benar dan salah [8].
Misalkan diketahui klasifikasi sebagai berikut :
MUDA umur < 35 tahun
SETENGAH BAYA 35 umur 55 tahun
TUA umur > 55 tahun
demikian pendekatan crisp ini sangat tidak cocok untuk diterapkan pada hal-hal yang bersifat kontinu, seperti umur.
Selain itu, untuk menunjukkan suatu umur pasti termasuk SETENGAH BAYA, atau tidak termasuk SETENGAH BAYA, dan menunjukkan suatu nilai kebenaran 0 atau 1, dapat digunakan nilai pecahan dan menunjuk 1 atau nilai yang dekat dengan 1 untuk umur 45 tahun, kemudian perlahan menurun menuju ke 0 untuk umur dibawah 35 tahun dan diatas 55 tahun.
Pusat dari fungsi keanggotaan untuk beberapa himpunan fuzzy A
didefinisikan sebagai daerah dari universe yang dicirikan oleh keanggotaan
lengkap dan penuh dalam himpunan A yaitu pusat terdiri dari elemen-elemen x
dari universe sehingga � = 1.
Penyokong dari fungsi tujuan untuk beberapa himpunan fuzzy A
didefinisikan sebagai daerah dari universe yang dicirikan oleh keanggotaan tak
nol dalam himpunan A yaitu penyokong terdiri dari elemen-elemen x dari universe sehingga � > 0. Suatu himpunan fuzzy yang pendukungnya merupakan satu titik di dalam universe disebut fuzzy singleton.
Batas dari fungsi tujuan untuk beberapa himpunan fuzzy A didefinisikan sebagai daerah dari universe berisi elemen-elemen yang memiliki keanggotaan
tak nol tetapi juga keanggotaan tidak lengkap yaitu batas terdiri dari
Himpunan fuzzy convex dilukiskan oleh fungsi keanggotaan yang nilai
keanggotaan merupakan penambahan tepat secara monoton atau nilai
keanggotaan merupakan pengurangan tepat secara monoton atau nilai
keanggotaan merupakan penambahan tepat secara monoton kemudian nilai
keanggotaan merupakan pengurangan tepat secara monoton dengan
menambahkan nilai untuk elemen dalam universe. Dengan kata lain, jika untuk
beberapa nilai elemen x, y, z dalam himpunan fuzzy A, relasi < < yang mengandung arti bahwa
� min [ � , � ] (2.1)
2.1.1. Fungsi Keanggotaan
Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaannya (sering juga disebut dengan derajat keanggotaan) yang memiliki interval antara 0 sampai 1 [8].
Sebuah himpunan fuzzy A dari bilangan riil didefinisikan oleh fungsi keanggotaannya (dinotasikan oleh A)
� ∶ → 0,1 (2.2)
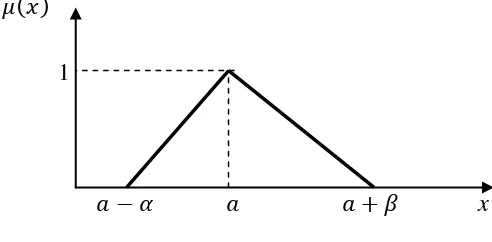
2.1.2. Bilangan Fuzzy Triangular
Sebuah himpunan fuzzy A disebut bilangan fuzzy triangular dengan nilai tengah a, sebelah kiri > 0 , dalam disebut convex jika A adalah unimodal (sebagai sebuah fungsi). Bilangan fuzzy dan sebelah kanan > 0. Fungsi keanggotaannya adalah sebagai berikut :
� =
1− − −
1− − +
0
(2.3)
Penyokong A adalah ( − , + ). Bilangan fuzzy triangular dengan nilai tengah a dilihat sebagai nilai kwantitas fuzzy. “ x dekat terhadap a “atau” x hampir sama dengan a”.
1
− + x Gambar 2.1 Bilangan Fuzzy Triangular
2.1.3. Bilangan Fuzzy Trapezoidal
� =
1− − − 1
1− − +
0
(2.4)
Penyokong A adalah ( − , + ). Bilangan fuzzy trapezoidal dapat dilihat sebagai nilai kwantitas fuzzy. “ x mendekati pada interval [a,b] ”.
1
x
− a b +
Gambar 2.2 Bilangan Fuzzy Trapezoidal
2.2 Goal Programming
2.2.1 Konsep Dasar dari Goal Programming
maksimasi atau minimisasi, sementara dalam LGP tujuannya adalah meminimumkan penyimpangan-penyimpangan dari tujuan-tujuan tertentu. Ini berarti semua masalah LGP adalah masalah minimisasi.
a. Berikut ini adalah definisi dari beberapa istilah dan lambang yang biasa digunakan dalam LGP.
Decision variable (Variabel keputusan) : seperangkat variabel yang tidak diketahui (dalam model LGP dilambangkan dengan xj, dimana j= 1,2,…,n) yang akan dicari nilainya
Right hand side values (RHS) : nilai – nilai yang biasanya menunjukkan ketersediaan sumber daya (dilambangkan dengan bi) yang akan ditentukan kekurangan atau kelebihan penggunaannya.
Goal (Tujuan) : keinginan untuk meminimumkan angka penyimpangan dari suatu nilai RHS pada suatu goal constraint / kendala tujuan tertentu.
Goal Constraint (Kendala Tujuan):sinonim dari istilah goal equation, yaitu suatu tujuan yang diekspresikan dalam persamaan matematik dengan memasukkan variabel simpangan.
Preemptive priority factor : suatu system urutan (yang dilambangkan dengan Pk, dimana k = 1,2,…,K dan K menunjukkan banyaknya tujuan dalam model) yang memungkinkan tujuan-tujuan disusun secara ordinal dalam model LGP. Sistem urutan itu menempatkan tujuan-tujuan dalam susunan dengan hubungan seperti berikut :
�1 > �2 >⋯ > �
1
P merupakan tujuan yang paling penting
2
P merupakan tujuan yang kurang penting dan seterusnya.
model LGP dilambangkan dengan di, dimana i = 1,2,…,m dan m adalah banyaknya kendala tujuan dalam model) atau penyimpangan positif dari suatu nilai RHS (dilambangkan dengan di). Variabel-variabel ini serupa dengan slack variabel dalam LP.
Differential weight (bobot) : timbangan matematik yang diekspresikan dengan angka kardinal (dilambangkan dengan wkidimana k =1,2,…, K: i =1,2,…m) dan digunakan untuk membedakan variabel simpangan i di dalam suatu tingkatan prioritas k.
Technological coeffient (koefisien teknologi) : nilai-nilai numerik (dilambangkan dengan aij) yang menunjukkan penggunaan nilai biper unit untuk menciptakan
j x .
b. Unsur-unsur Linear Goal Programming (LGP)
Setiap model LGP paling sedikit terdiri dari tiga komponen yaitu, sebuah fungsi tujuan, kendala tujuan dan kendala non-negatif.
Fungsi Tujuan
Ada tiga jenis fungsi tujuan dalam LGP, yaitu :
Minimumkan Z =
Fungsi tujuan diatas digunakan jika variabel simpangan dalam suatu masalah tidak dibedakan menurut prioritas atau bobot.
Minimumkan Z =
Fungsi tujuan diatas digunakan dalam suatu masalah dimana tujuan-tujuan diurutkan dan variabel simpangan pada setiap tingkat prioritas dibedakan dengan menggunakan bobot yang berlainan wki[8]. itu ditentukan oleh hubungannya dengan fungsi tujuan.pada tabel berikut:
Kendala Tujuan
Setiap jenis kendala tujuan harus punya satu atau dua variabel simpangan yang ditempatkan pada fungsi tujuan. Dimungkinkan adanya kendala-kendala persamaan linier. Persamaan pertama maknanya serupa dengan kendala pertidaksamaan dalam masalah program linier maksimisasi. Persamaan kedua maknanya serupa dengan kendala pertidaksamaan pada masalah program linier minimisasi. Persamaan ketiga, keempat dan kelima semuanya memperbolehkan penyimpangan dua arah, tetapi persamaan kelima mencari penggunaan sumber daya yang diingginkan sama dengan bi. Ini serupa dengan kendala persamaan dalam linier programming, tetapi tidak menempel pada solusi karena dimungkinkan adanya penyimpangan negatif dan positif. Jika kendala persamaan dianggap perlu dalam perumusan model linear goal programming (LGP), ia dapat dimasukkan dengan menempatkan sebuah variabel artifial di, seperti pada persamaan keenam. Persamaan ketiga dan keempat memperbolehkan adanya penyimpangan positif dan negatif dari nilai RHSnya.
Kendala Non-Negatif
Seperti dalam liear programming, variabel-variabel model LGP biasanya bernilai lebih besar atau sama dengan nol. Semua model LGP terdiri dari variabel simpangan dan variabel keputusan, sehingga pernyataan non-negatif dilambangkan sebagai :
0 ,
Kendala Struktural
Disamping ketiga komponen yang telah disebutkan itu, dalam model LGP kadang-kadang terdapat komponen yang lain, yaitu kendala struktural artinya kendala-kendala lingkungan yang tidak berhubungan langsung dengan tujuan-tujuan masalah yang dipelajari. Variabel simpangan tidak dimasukkan dalam kendala ini, karena itu, kendala ini tidak diikutsertakan dalam fungsi tujuan.
2.3. Model Fuzzy Goal Programming
Pemaparan teori himpunan fuzzy untuk masalah goal programming pertama kali dikemukakan oleh Hannan(1981) juga Ignizio (1982). Secara komprehensif berbagai aspek teori keputusan dengan menggunakan pendekatan fuzzy goal programming didiskusikan oleh Rubin dan Narasimhan (1984) juga Tiwarki dkk (1986). Aplikasinya untuk pemodelan keputusan untuk berbagai aspek yang luas, misalnya untuk persoalan manajemen lingkungan diungkapkan oleh Tiwari dkk (1985).
Ada sedikit perbedaan antara Goal Programming dan Fuzzy Goal Programming yaitu goal programming membutuhkan pengambil keputusan untuk menetapkan dengan pasti nilai-nilai aspirasi untuk setiap tujuan yang ingin dia capai, sedangkan kemudian ditetapkan dalam cara yang tidak teliti. Tujuan fuzzy di sini dianggap sebagai tujuan dengan tingkat aspirasi tidak tepat. Pertimbangan kepentingan relatif berbeda dan tujuan prioritas dalam tujuan fuzzy layak daripada yang lain. Narasimhan telah menggunakan linguistik variabel, seperti "sangat penting", "kurang penting" dan "agak penting", untuk menggambarkan bobot fuzzy tujuan, dan didefinisikan keanggotaan sesuai fungsi dengan menentukan interval derajat keanggotaan yang diinginkan untuk mencerminkan pentingnya.
� 1, 2,…, (2.5)
Sehingga memenuhi � ≅ , = 1,2,…,
S.t �� ≅ , � 0, (2.6) Dimana X adalah vektor variabel-variabel keputusan, adalah ketidakjelasan level aspirasi ke- k tujuan � ( = 1,2,…, ), A adalah koefisien matriks, b adalah vektor nilai kanan (sumber)
�� ≅ mewakili kendala fuzzy, dimana dan menunjukkan pada versi fuzzy dari dan .
Sekarang dalam situasi pengambilan keputusan fuzzy, fuzzy goal dicirikan oleh fungsi keanggotaannya secara beturut-turut.
2.4 Bilevel programming
setiap divisi menentukan perencanaan produksi dalam pengetahuan yang baik dari budget.
Penelitian dalam pemrograman matematika multi-level yang menyelesaikan rencana organisasi dan masalah mengambil keputusan telah tersebar secara luas. Penelitian dan aplikasi telah dipusatkan secara utama dalam pemrograman bilevel. Dalam masalah Bilevel Programming (BLP), setiap pengambil keputusan mencoba mengoptimalkan fungsi tujuannya sendiri tanpa mengikuti tujuan-tujuan dari bagian lain, tetapi keputusan dari setiap bagian mempengaruhi nilai-nilai tujuan dari bagian lain.
Pengambil keputusan tingkat pertama atau disebut leader bergerak pertama dengan memilih sebuah x dalam usaha meminimumkan fungsi tujuannya ( , ) dengan syarat ikatan kendala pasti. Kemudian pengambil keputusan tingkat kedua atau disebut follower mengamati aksi leader dan bereaksi dengan memilih y untuk meminimumkan fungsi tujuannya ( , ) dibawah beberapa kendala.
Masalah bilevel dapat diformulasikan sebagai berikut:
min ( , )
s.t , 0 (2.7)
min ,
s.t , 0
dimana ∶ 1 2 → , ∶ 1 2 → 1 , ∶ 1 2 → , ∶ 1 2 → 2
2.5 Optimisasi Multi-Objektif
karena kekurangan metode penyelesaian yang sesuai, MOOP telah banyak dikelompokkan dan diselesaikan sebagai masalah optimasi single-objective di masa yang lalu. Akan tetapi, ada sejumlah perbedaan pokok antara prinsip-prinsip pengerjaaan dari algoritma optimasi single dan multi-objective. Dalam masalah optimasi single-objective, tugasnya adalah mencari satu solusi yang mengoptimalkan fungsi tujuan tunggal. Kemudian ide tersebut diperluas pada optimasi multi-objective yaitu menemukan satu solusi optimal yang berkorespondensi pada setiap fungsi tujuan.
2.5.1. Masalah Optimasi Multi-Objective
Masalah optimasi multi-objective memiliki sejumlah fungsi tujuan yang akan diminimumkan atau dimaksimumkan. Sebagaimana di dalam masalah optimasi single-objective, biasanya masalah juga memiliki sejumlah kendala di mana solusi fisibel (termasuk solusi optimal) harus terpenuhi. Berikut ini, menyatakan masalah optimasi multi-objective (MOOP) dalam bentuk umumnya:
Min/Maks (�), = 1, 2,…,
Kendala � 0, = 1, 2,… , (2.8) � = 0, = 1, 2,…,
( ) ( ), = 1, 2,…,
Solusi adalah sebuah vektor variabel keputusan : 1, 2,…, . Himpunan akhir kendala disebut batas variabel, membatasi setiap variabel keputusan untuk mengambil sebuah nilai dengan batas bawah ( ) dan batas atas ( ). Batas-batas ini merupakan sebuah ruang variabel keputusan �, atau menyatakan ruang keputusan.
Ketidaksamaan kendala dinyatakan sebagai jenis „ , =‟, walaupun jenis persamaan
kendala „ . =‟ juga dinyatakan dalam formula di atas. Sebuah solusi yang tidak memenuhi semua kendala + dan semua batas variabel 2 yang dinyatakan di atas disebut solusi infisibel. Dengan kata lain, jika beberapa solusi memenuhi semua kendala dan batas variabel, disebut sebagai solusi fisibel. Dengan demikian, disadari bahwa dalam kehadiran kendala, keseluruhan ruang variabel keputusan � tidak harus fisibel. Himpunan semua solusi fisibel disebut daerah fisibel atau �.
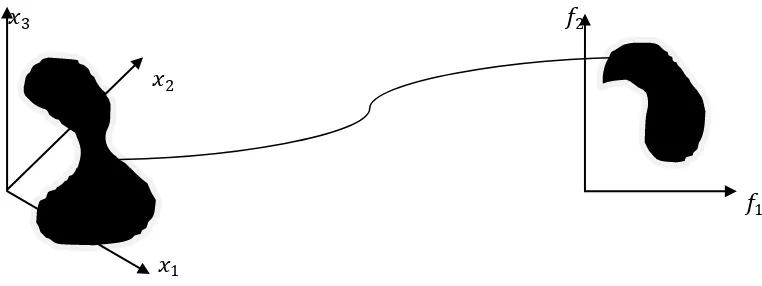
Walaupun ada perbedaan yang signifikan dalam cara bahwa sebuah fungsi kriteria dan sebuah fungsi tujuan didefinisikan, dalam pandangan yang luas dinyatakan identik. Salah satu perbedaan menonjol antara single-objective dengan multi-objective adalah bahwa dalam optimasi multi-objective fungsi tujuan merupakan sebuah ruang multi-dimensional, dalam tambahan pada ruang variabel keputusan biasa. Ruang tambahan ini disebut ruang tujuan, �. Untuk setiap solusi dalam ruang variabel keputusan, ada sebuah titik di dalam ruang tujuan dinyatakan dengan = = 1, 2,…, . Pemetaan terjadi antara – dimensi vektor solusi dan sebuah − dimensi vektor tujuan.
Optimasi multi-objektive kadang-kadang mengacu pada optimasi vektor, karena sebuah vektor tujuan, sebagai ganti tujuan tunggal, dioptimalkan.
2.5.1.1 Masalah Optimasi Multi-Objective Linier dan Nonlinier
multi-objective. Sayangnya, untuk teknik penyelesaian masalah nonlinier sering tidak memiliki bukti yang konvergen. Karena kebanyakan kenyataanya masalah optimasi multi-objective merupakan nonlinier pada dasarnya, tidak diasumsikan beberapa struktur khusus tujuan dan fungsi kendala di sini.
3 2
2
1
1
Gambar 2.3 Perwakilan hubungan dari ruang variabel keputusan dan ruang tujuan
2.5.1.2 Masalah Optimasi Konvex dan Nonkonvex
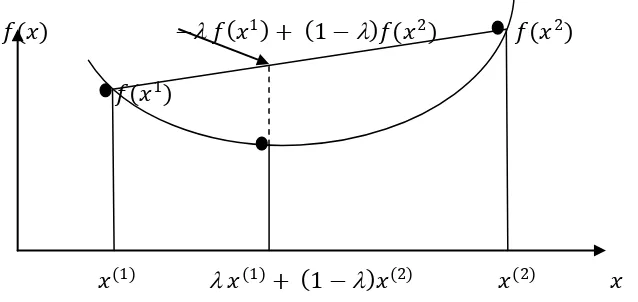
Definisi 2.1 Sebuah fungsi ∶ ℝ ⟶ ℝ merupakan fungsi konveks jika ada dua pasangan solusi (1), (2)�ℝ , maka kondisi berikut adalah benar:
(1)+ 1− (2) (1) + 1− (2) (2.9) untuk semua 0 1.
Definisi di atas menimbulkan sifat fungsi konveks sebagai berikut:
1. Aproksimasi linier pada suatu titik dalam interval (1), (2) selalu menaksir terlalu rendah nilai fungsi sebenarnya.
2. Matriks hessian adalah definit positif untuk semua .
3. Untuk sebuah fungsi konveks, minimum lokal selalu merupakan minimum global.
Gambar 2.3 mengilustrasikan sebuah fungsi konveks. Sebuah fungsi yang menyatakan persamaan yang ditunjukkan dalam persamaan (2.2) dengan tanda „ ‟
fungsi adalah konveks dengan suatu interval, matriks hessian 2 dihitung dan diperiksa kedefinitan positif pada semua titik di dalam interval tersebut. Salah satu cara memeriksa kedefinitan positif suatu matriks adalah menghitung nilai eigen matriks dan diperiksa untuk melihat apakah semua nilai eigen positif untuk menguji apakah sebuah fungsi adalah nonkonveks dalam sebuah interval, matriks hessian − 2 diperiksa untuk mengetahui kedefinitan positif-nya. Jika matriks tersebut definit positif, fungsi adalah non-konveks.
Adalah sangat menyenangkan menyadari bahwa jika sebuah fungsi adalah nonkonveks, himpunan solusi memenuhi 0 mewakili himpunan konveks. Jadi, ruang pencarian fisibel yang dibentuk dengan fungsi kendala nonkonveks akan melampirkan daerah konveks.
( ) − 1 + 1− ( 2) ( 2) ( 1)
(1) (1)+ 1− (2) (2) Gambar 2.4 Ilustrasi fungsi convex
Definisi 2.1.2 Sebuah masalah optimasi multi-objective adalah konveks jika semua
fungsi tujuan konveks dan daerah fisibel konveks (atau semua persamaan kendala adalah nonkonveks dan kesamaan kendala adalah linier).
Berdasarkan definisi ini, sebuah pemrograman linier multi-objective adalah masalah konveks.
Bidang dari Linear Fractional Programming (LFP), secara luas dikembangkan oleh seorang matematisi Hungaria B.Martos dan asosiasinya di tahun 1960an dengan memusatkan pada masalah optimisasi. Beberapa metode penyelesaian masalah ini disarankan tahun (1962), Charnes dan Cooper telah menyarankan metode mereka dengan bergantung pada transformasi ini (LFP) kepada ekivalen program linier. Metode yang lain disebut metode fungsi tujuan yang diperoleh dari Bitran dan Novaes (1973) digunakan menyelesaikan LFP dengan menyelesaikan barisan program linier dengan hanya menghitung kembali gradien lokal dari fungsi tujuan.
Bentuk umum dari masalah LFP dapat dibuat sbb :
Optimalkan = + masalah linear fractional programming yang umum, maka masalah dikenal sebagai masalah linear fractional programming multiobjektif. Secara matematika itu dapat ditulis sebagai
Masalah Pemrograman bi-level dimana setiap pengambil keputusan mempunyai fungsi multiobjektif yang dapat memaximumkan dan dua pengambil keputusan dapat menentukan keputusan mereka secara bekerja sama. Sehingga masalah pemrograman bi-level linear multi-objektif diformulasikan sebagai berikut:
Diasumsikan bahwa ada dua tingkatan dalam struktur hirarki dengan pengambil keputusan tingkat pertama (FLDM) dan pengambil keputusan tingkat kedua (SLDM). Andaikan vektor variabel keputusan = 1, 2 dipartisi antar kedua perencana. Pengambil keputusan tingkat pertama memiliki kontrol atas vektor 1 1 dan pengambil keputusan tingkat kedua 2 2 , dimana = 1+ 2. Selanjutnya, asumsikan bahwa
1, 2 ∶ 1 2 → 1, = 1,2 (1.1) adalah masing-masing vektor fungsi tujuan tingkat pertama dan tingkat kedua. Jadi masalah BL- MOLFP tipe minimisasi dapat dirumuskan sebagai berikut :
Tingkat1
min 1 1 1, 2 = min 1( 11 1, 2 , 12 1, 2 ,…, 1 1( 1, 2)), (1.2) dimana 2 menyelesaikan
min 2 2 1, 2 = min 2( 21 1, 2 , 22 1, 2 ,…, 2 1( 1, 2)) (1.3) subject to
= = 1, 2 �1 1+ �2 2 = , 0, ≠ ∅ (1.4) dimana
1 2 = +
+ (1.5)
= 1,2,…, 1, = 1 untuk fungsi tujuan pengambil keputusan tingkat pertama = 1,2,…, 2, = 2 untuk fungsi tujuan pengambil keputusan tingkat kedua
Dan dimana
i. 1 = 11, 12, 13,…, 11 ,
2 = 21, 22, 23,…, 22
ii. G adalah serangkaian pilihan kendala layak convex bilevel iii. 1adalah jumlah fungsi tujuan tingkat pertama,
iv. 2 adalah jumlah fungsi tujuan tingkat kedua, v. m adalah jumlah kendala,
vi. � ∶ × 1 matriks, i = 1, 2,
BAB 3
PEMBAHASAN
3.1. Perumusan Fuzzy Goal Programming BiLevel Multiobjektive Linear
Fractional Programming (BL-MOLFP)
Dalam masalah BL-MOLFP, jika tingkat aspirasi tepat ditugaskan untuk masing-masing tujuan di setiap tingkat BL-MOLFP, maka tujuan fuzzy ini disebut sebagai fuzzy goal. Mereka ditandai oleh keanggotaan yang terkait fungsi mereka dengan mendefinisikan batas toleransi untuk pencapaian tingkat cita-cita mereka.
3.2. Konstruksi Fungsi Keanggotaan
Karena First Level Decision Making (FLDM) /pengambil keputusan tingkat pertama dan Second Level Decision Making (SLDM)/ pengambil keputusan tingkat kedua keduanya tertarik untuk meminimalkan fungsi tujuan mereka sendiri di atas daerah layak sama, didefinisikan oleh sistem kendala yang solusi optimal keduanya dihitung secara terpisah yang dapat diambil sebagai terkait tingkat aspirasi tujuan fuzzy mereka. Andaikan 11 , 21 ; 1 , = 1,2,…, 1 dan 2
2
, 22 ; 2 , = 1,2,…, 2 menjadi solusi optimal FLDM dan fungsi tujuan SLDM, masing-masing, jika dihitung secara terpisah. Andaikan tingkat aspirasi yang akan ditugaskan untuk tujuan ke-ij 1 , 2 (subskrip ij berarti bahwa j= 1,2,…,
1 ketika i = 1 untuk masalah FLDM, dan j =1,2,… 2 ketika i = 2 untuk masalah SLDM. Juga,andaikan ∗ = 1∗, 2∗ , 1∗ = ( 11∗, 12∗,…, 1∗ 1) dan
2∗ = ( 21∗, 22∗,…, 2
pengambil keputusan fungsi tujuan pada kedua tingkat dan tujuan vektor fuzzy goal dari variabel keputusan yang dikendalikan oleh pengambil keputusan tingkat pertama yang muncul sebagai
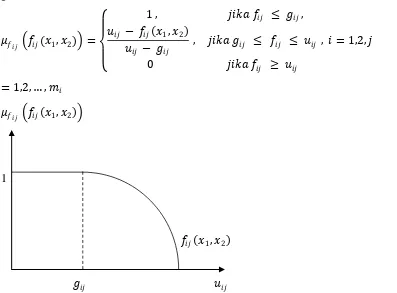
Gambar 3.1 Fungsi keanggotaan dari tipe minimalisasi fungsi objektif.
pertama, 1= 11, 12, 13,… 11 , dalam model yang diusulkan dalam artikel ini. Untuk membangun fungsi keanggotaan ini, solusi optimal ∗ = 1∗, 2∗ dari tingkat pertama masalah MOLFP yang harus ditentukan terlebih dahulu. Setelah pendekatan Pal et al. solusi optimal ∗ = 1∗, 2∗ bisa diperoleh. Dapat dicatat bahwa pendekatan-pendekatan lain untuk menyelesaikan masalah MOLFP bisa digunakan dalam menyelesaikan tingkat pertama masalah MOLFP. Dalam bagian 4, model FGP dari Pal et al. untuk menyelesaikan masalah tingkat pertama MOLFP, disajikan untuk memfasilitasi keberhasilan dari ∗ = 1∗, 2∗ .
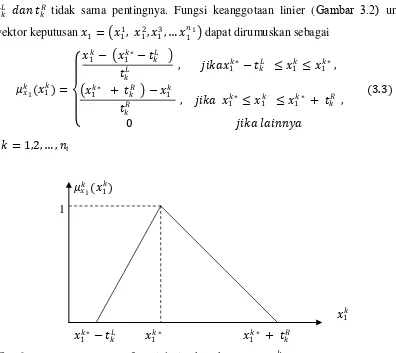
Andaikan dan , = 1,2,… 1 menjadi nilai toleransi maksimum positif dan negative pada vektor keputusan yang dipertimbangkan oleh FLDM. Toleransi tidak sama pentingnya. Fungsi keanggotaan linier (Gambar 3.2) untuk
Gambar 3.2 Keanggotaan fungsi dari vektor keputusan 1
oleh kemungkinan pencapaian nilai keanggotaan masing-masing ke tingkat tertinggi. Mengenai aspek masalah pemrograman fuzzy ini, pendekatan goal programming tampaknya paling tepat untuk solusi dari masalah multi obyektif tingkat pertama pemrograman linear fraksional dan masalah bi-level multi-objektif pemrograman linier fraksional.
3.3. Pendekatan Fuzzy Goal Programming
Dalam pendekatan pemrograman fuzzy, derajat tertinggi fungsi keanggotaan adalah 1. Jadi, untuk fungsi keanggotaan didefinisikan dalam (3.2) (3.3), dan sasaran keanggotaan fleksibel dengan cita-cita level 1 dapat disajikan sebagai
1, 2 + − − + = 1, = 1,2,…, (3.4) deviasi di bawah dan di atas dari tingkat yang diinginkan.
Hal ini dapat dengan mudah menyadari bahwa tujuan keanggotaan dalam (3.2)
secara inheren nonlinear dan ini akan menyebabkan kesulitan komputasi dalam proses solusi. Untuk menghindari masalah, prosedur linierisasi disajikan pada bagian berikut. Oleh karena itu, mengingat masalah pencapaian tujuan pada tingkat prioritas yang sama, ekivalen dengan model masalah fuzzy goal programming bilevel multiobyektif linear fractional programming dapat disajikan sebagai
min = 1+
dan masalah di atas dapat ditulis kembali sebagai
3.4. Linierisasi dari Tujuan Keanggotaan
Setelah itu, keanggotaan tujuan ke-ij di (3.5) dapat disajikan sebagai − 1, 2 + − − + = 1, dimana andaikan =
1
− . (3.8)
memperkenalkan ekspresi f ( 1, 2) dari (1.5), tujuan di atas dapat disajikan sebagai − + + + − − + = 1
⇒ + − + + − + − + + = ( + )
⇒ − + + − + − + + = + − +
⇒ − + + − + − + + = 1− +
⇒ − + + − + − + + = ′ + , dimana ′ = 1−
⇒ − + + − + − + + − ′ + = 0 ⇒ − − + − + − + + − ′ − ′ = 0 ⇒ − − ′ + − + − + + − − ′ = 0 ⇒ − − ′ + − + − + + = + ′
⇒ + − + − + + = , (3.9)
dimana
= − − ′ , = + ′ (3.10)
Sekarang, dengan menggunakan metode variabel peubah, istilah tujuan dalam (3.9) bisa dilinierisasikan sebagai berikut, andaikan − = − + dan + =
+ + bentuk linier dari ekspresi dalam (3.9) diperoleh sebagai
Sekarang, dalam pengambilan keputusan, minimalisasi + berarti minimalisasi + = + + atau juga + =
+
+ yang juga merupakan satu non-linear.
Dapat dicatat bahwa ketika tujuan keanggotaan sepenuhnya tercapai, + = 0 dan ketika keberhasilan nol, + = 1 ditemukan dalam solusi. Jadi, keterlibatan Di sini, berdasarkan pembahasan sebelumnya, mungkin menunjukkan bahwa seperti apa pun untuk kendala terkait. − tidak muncul dalam perumusan model.
−, −, +, +, = 1,2,…,
1untuk fuzzy goal dari variabel keputusan 11, 12, 13,…, 1
1 dimana bobot numerik +, , dan mewakili kepentingan relatif mencapai cita-cita tingkat fuzzy goal masing-masing yang dikenakan batasan yang ditetapkan dalam situasi keputusan.
Untuk menilai kepentingan relatif dari tujuan fuzzy, skema pembobotan disarankan untuk dapat digunakan untuk menetapkan nilai + dan 1−. Saat ini formulasi, nilai − dan 1− ditentukan sebagai
+ = 1
− , = 1,2, = 1,2,… , (3.14)
= 1 , = 1 , = 1,2,…, 1,
Model FGP (3.13) menyediakan keputusan yang paling optimal untuk FLDM dan SLDM dengan cara mencapai cita-cita tingkat tujuan keanggotaan sejauh mungkin dalam lingkungan keputusan. Prosedur solusi langsung dan diilustrasikan melalui contoh berikut.
3.5. Model Fuzzy Goal Programming untuk Masalah Multi-Objective Linear
Fractional Programming
Pada bagian ini, model FGP untuk menyelesaikan masalah MOLFP tingkat pertama, disini disajikan untuk memfasilitasi pencapaian ∗ = ( 1∗, 2∗). Solusi ini digunakan untuk memperoleh fungsi keanggotaan tersebut dari vektor keputusan = 11, 12, 13,…, 11, yang termasuk dalam pendekatan FGP untuk menyelesaikan masalah BL -MOLFP yang diusulkan dalam artikel ini.
Masalah tingkat pertama MOLFP adalah
= 1+
3.6. Algoritma FGP untuk Masalah BL -MOLFP
Setelah pembahasan di atas, sekarang kita dapat membangun algoritma FGP yang diusulkan untuk menyelesaikan masalah BL -MOLFP.
Langkah 1. Hitung individu minimum dan maksimum dari setiap fungsi obyektif di dua tingkat di bawah kendala yang diberikan.
Langkah 2. Tetapkan tujuan dan batas toleransi atas untuk semua fungsi obyektif dalam dua tingkat.
Langkah 3. Menimbulkan fungsi keanggotaan
1 1 1, 2 , = 1,2,… 1 untuk masing-masing fungsi tujuan di tingkat pertama.
Langkah 4. Merumuskan Model (4.2) untuk masalah MOLFP tingkat pertama. Langkah 5. Menyelesaikan Model (4.2) untuk mendapatkan ∗ = ( 1∗, 2∗).
Langkah 8. Menimbulkan fungsi keanggotaan
2 2 1, 2 , = 1,2,… 2 untuk masing-masing fungsi tujuan di tingkat kedua.
Langkah 9. Merumuskan Model (3.13) untuk masalah BL -MOLFP.
3.7. Contoh Numerik
1− terpisah dari perlakuan kendala tujuan yang diberikan. Memutuskan tingkat aspirasi dan batas toleransi atas untuk fungsi objektif yang juga disebutkan. Nilai , ′ ,
, dan bobot dihitung dan juga terdapat dalam tabel.
Fungsi keanggotaan untuk masing-masing fungsi tujuan di tingkat pertama sbb:
11 11 1, 2 =
Mengikuti prosedur, model FGP untuk tingkat pertama masalah multi-objektif pemrograman linear fraksional dalam (4.2) diperoleh sebagai
= 2 11+ + 12+
1( 1) =
Fungsi keanggotaan untuk masing-masing fungsi tujuan di tingkat kedua sbb:
21 21 1, 2 =
Mengikuti prosedur, model FGP untuk tingkat kedua masalah multi-objektif pemrograman linear fraksional dalam (4.2) diperoleh sebagai
= 0.625 12+ + 0.25 22+ + 0.25 23+
Kemudian, mengikuti prosedur, model FGP yang diusulkan untuk masalah bi-level multi-obyektif pemrograman linear fraksional diperoleh sebagai berikut:
− 2+ 12+ 4, 2+ 21+ 3, − 2+ 22+ 1,
23+ 1, (6.5)
2.5 1+ 1−− 1+ = 2, 2.5 1− 1−+ 1+ = 2, − 1+ 4 2 0,
1−1
2 2 4, 1 , 2 0,
1−, 1+ , 1−, 1+ 0,
11− , 11+ , 12− , 12+ , 21− , 21+ , 22− , 22+, 23− , 23+ 0.
Dengan menggunakan program LINDO diperoleh solusi optimal yang memuaskan dari masalah yaitu Z = 7,2 dengan nilai 1 , 2 = (0.8 , 0.2) dan nilai penyimpangan (deviasi) adalah 11+ = 3,6, 12+ = 0, 21+ = 0, 22+ = 0, 23+ = 0, 11− = 0, 12− = 4,7, 21− = 3,525, 22− = 0, 23− = 0,2, 1− = 0, 1+ = 0, 1− = 0, 1+ = 0 dengan nilai fungsi tujuan dengan memasukkan harga ( 1 , 2) sehingga 11 = 0,
BAB 4
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Dari penelitian ini dapat disimpulkan beberapa hal mengenai prosedur fuzzy goal programming untuk masalah bilevel multiobjektif linear fractional programming yaitu bahwa model fuzzy goal programming untuk meminimalkan kekecewaan kelompok tingkat kepuasan baik dari pembuat keputusan yang dikembangkan untuk mencapai kesatuan derajat tertinggi dari masing-masing keanggotaan yang ditentukan fungsi tujuan sejauh mungkin dengan meminimalkan variabel deviasi mereka dan dengan demikian mendapatkan solusi yang paling memuaskan bagi para pengambil keputusan. Keuntungan utama prosedur fuzzy goal programming yang diusulkan adalah bahwa kemungkinan menolak solusi lagi dan lagi oleh FLDM dan reevaluasi masalah yang berulang kali, melalui pendefinisian ulang fungsi keanggotaan yang ditimbulkan, diperlukan untuk mencapai keputusan yang memuaskan tidak muncul. Sehingga diperoleh solusi paling optimal Z = 7,2 dengan 1 , 2 = (0.8 , 0.2), dan nilai deviasi 11+ = 3,6, 12+ = 0, 21+ = 0, 22+ = 0, 23+ = 0, 11− = 0, 12− = 4,7,
4.2 Saran
DAFTAR PUSTAKA
[1] Aryanezhad M.B & Roghanian E. A Bi-level Linear Multiobjective Decision Making Model With Interval Coefficients For Supply Chain Coordination. IUST International Journal of Engineering Science, Vol. 19, No.1-2,2008, page 67-74 Mathematics & Industrial Enginnering Special Issue.
[2] Charnes, A dan Cooper, W.W. (1962). Programming with linear fractional functional. Nav. Res. Log. Quart, 9, 181-86.
[3] Deb, Kalyanmoy. 2008. Multi-Objektive Optimization Using Evolutionary Algoritms. India. Jhon Wiley & Sons, Ltd.
[4] Gao, Ya. 2010. A thesis submitted for the degree of Doctor of Philosophy, Bi-Level Decision Making with Fuzzy Sets and Particle Swarm Optimization. [5] J.Ross, Timothy. 1995. Fuzzy Logic with Engineering Applications. Singapore.
McGraw-Hill, Inc.
[6] Klir J.George dan Folger A.Tina. 1988. Fuzzy Set, Uncertainty, and information.USA:Prentice-Hall.
[7] Kosmidou, Kyriaki dan Z. Constantin. 2004. Goal Programming Techniques for Bank Asset Liability Management. Boston: Kluwer Academic Publisher. [8] Kusumadewi, Sri. 2002. Analisis dan Desain Sistem Fuzzy Menggunakan
[9] M. A, Abo-Sinna dan I. A, Baky. Fuzzy Goal Programming Procedure to Bilevel Multiobjective Linear Fractional Programming Problems. Hindawi Publishing Corporation International Journal of Mathematics and Mathematical Sciences Volume 2010, Article ID 148975, 15 pages doi:10.1155/2010/148975.
[10] Mulyono,Sri. 2004. Riset Operasi. Jakarta: Fakultas Ekonomi UI.
[11] Nachrowi, N.D. dan Usman Hardius. 2004. Teknik Pengambil Keputusan. Jakarta:PT.Gasindo.
[12] Nasendi, B.D. dan Anwar Efendi. 1985. Program Linier dan Variasinya. Jakarta:PT.Gramedia.
[13] Pal K.Sankar dan Dutta K.Dwijesh. 1989. Fuzzy pendekatan matematik untuk pengenalan pola. Jakarta:UI-Press.
[14] Sharma, J.K, Gupta, A.K dan Gupta, M.P. 1980. Extension of Simplex Technique for Solving Fractional Programming Problem. www.google//fractional programming// Indian J.pure appl.Math., 11(8) : 961-968, August 1980.
[15] Swarup K. (1965). Linear Fractional Functional Programming. Operations Research, 13, 1029-36.
LAMPIRAN
1). Hasil dari model FGP untuk MOLFP
LP OPTIMUM FOUND AT STEP 1 OBJECTIVE FUNCTION VALUE 1) 4.000000
VARIABLE VALUE REDUCED COST X3 2.000000 0.000000 X4 0.000000 1.000000 X1 0.000000 4.000000 X5 0.000000 2.000000 X2 0.000000 0.000000 X6 4.000000 0.000000
5) 0.000000 0.000000 6) 4.000000 0.000000 7) 0.000000 0.000000 8) 0.000000 0.000000 9) 2.000000 0.000000 10) 0.000000 0.000000 11) 0.000000 0.000000 12) 4.000000 0.000000
NO. ITERATIONS = 1
RANGES IN WHICH THE BASIS IS UNCHANGED: OBJ COEFFICIENT RANGES
VARIABLE CURRENT ALLOWABLE ALLOWABLE COEF INCREASE DECREASE X3 2.000000 INFINITY 2.000000
RIGHTHAND SIDE RANGES
ROW CURRENT ALLOWABLE ALLOWABLE RHS INCREASE DECREASE 1 2.000000 5.000000 2.000000 2 4.000000 INFINITY 4.000000 3 7.000000 INFINITY 5.000000 4 4.000000 INFINITY 4.000000 5 0.000000 INFINITY 0.000000 6 4.000000 INFINITY 4.000000 7 0.000000 0.000000 INFINITY 8 0.000000 0.000000 INFINITY 9 0.000000 2.000000 INFINITY 10 0.000000 0.000000 INFINITY 11 0.000000 0.000000 INFINITY 12 0.000000 4.000000 INFINITY
2). Hasil dari model FGP untuk BL-MOLFP :
LP OPTIMUM FOUND AT STEP 6 OBJECTIVE FUNCTION VALUE 1) 7.200000
X3 3.600000 0.000000 X4 0.000000 1.000000 X5 0.000000 0.625000 X6 0.000000 0.250000 X7 0.000000 0.250000 X8 0.000000 0.000000 X9 0.000000 5.000000 X10 0.000000 3.400000 X11 0.000000 1.600000 X1 0.800000 0.000000 X12 0.000000 2.000000 X2 0.200000 0.000000 X13 4.700000 0.000000 X14 3.525000 0.000000 X15 0.000000 0.000000 X16 0.200000 0.000000
25) 0.000000 0.000000 26) 0.000000 0.000000 27) 4.700000 0.000000 28) 3.525000 0.000000 29) 0.000000 0.000000 30) 0.200000 0.000000
NO. ITERATIONS= 6
RANGES IN WHICH THE BASIS IS UNCHANGED: OBJ COEFFICIENT RANGES
X1 0.000000 8.500000 4.000000 X12 0.000000 INFINITY 2.000000 X2 0.000000 0.250000 0.000000 X13 0.000000 0.000000 0.500000 X14 0.000000 0.000000 0.625000 X15 0.000000 INFINITY 0.000000 X16 0.000000 34.000000 0.250000 RIGHTHAND SIDE RANGES