PENGENDALI JARAK JAUH ARAH DAN
KECEPATAN PUTAR MOTOR DC VIA SMS
BERBASIS MIKROKONTROLER AT90S2313
TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro
disusun oleh :
ANDREAS HENDRA STIAWAN
NIM : 025114014
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
DC MOTOR DIRECTION AND VELOCITY
REMOTE CONTROLLER USING SMS BASED ON
AT90S2313 MICROCONTROLLER
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
to Obtain the SARJANA TEKNIK Degree
in Electrical Engineering
by :
ANDREAS HENDRA STIAWAN
STUDENT NUMBER : 025114014
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
MOTO DAN PERSEMBAHAN
When things go wrong
As they sometimes will,
When the road you’re trudging
Seems all uphill,
When the funds are low
And the debts are high,
And you want to smile
But you have to sigh,
When care is pressing you down a bit,
Rest if you must but don’t you quit
-author Unknown-
Kupersembahkan Karya ini :
Unt uk Tuhan Yesus Kr i st us
Unt uk Bapak, Ibu, Apl hi dan Ti ka yang sangat kuci nt ai Unt uk Venyku t er sayang
Unt uk Semua t eman dan sahabat ku
Ter i makasi h at as segal a dukungan, kasi h dan ci nt a yang sel al u di ber i kan pada penul i s.
INTISARI
Telepon seluler sudah menjadi kebutuhan pokok pada saat ini. Penggunaan fasilitas SMS (Short Message Service) pada telepon seluler merupakan salah satu fasilitas paling populer yang banyak digunakan oleh masyarakat. Perpaduan antara teknologi elektronika dan teknologi komunikasi dapat digunakan untuk pengembangan sistem kontrol. Aplikasi dari penggunaan telepon seluler yang memanfaatkan fasilitas SMS dari operator dapat digunakan sebagai sistem kendali jarak jauh.
Pengendali jarak jauh arah dan kecepatan putar motor DC dengan fasilitas SMS berbasis mikrokontroler AT90S2313 adalah suatu alat yang dirancang sebagai pengendali jarak jauh yang memanfaatkan fasilitas SMS. Mikrokontroler digunakan sebagai antar muka telepon seluler dan motor DC. Setelah dapat membaca dan menerjemahkan isi pesan SMS perintah maka mikrokontroler akan memutar motor DC sesuai arah dan kecepatan putar yang diinginkan. Pengaturan kecepatan putar motor DC pada mikrokontroler memanfaatkan fasilitas PWM (Pulse Width Modulation) yang tersedia pada mikrokontroler AT90S2313. Sebagai driver motor DC digunakan IC (Integrated Circuit) L293D. Sedangkan sensor pendeteksi kecepatan putarnya digunakan optocoupler dan piringan bercelah.
Pada tugas akhir ini, perangkat pengendali jarak jauh arah dan kecepatan putar motor DC via SMS berbasis mikrokontroler AT90S2313 telah berhasil dibuat. Alat ini mampu memutar motor DC dengan perintah berupa SMS sesuai arah dan kecepatan yang diinginkan dan mampu mengirimkan hasil pantauan arah dan kecepatan putar dari motor DC tersebut
ABSTRACT
Cell Phone has already became the main needs nowaday. The use of SMS (Short Message Service) on cell phone is the most popular facility on the society. The mixing between electrical technology and communication technology can used for the control system development. The application from used of cell phone which is facilitating SMS from the operator can be use as remote control system.
DC motor direction and velocity remote controller using SMS based on AT90S2313 microcontroller is the devices which is plan as remote controller using SMS facilities. Microcontroller used as interface between cell phone and DC motor. After reading and translating the contain of command message, microcontroller will rotate DC motor as the same as direction and velocity by the request. Set up of motor DC velocity in the microcontroller use PWM (Pulse Width Modulation) facility. As motor DC driver used IC (Integrated Circuit) L293D. Detection sensor direction and velocity rotation used optocoupler and code disk.
On this final task, the device of remote for direction and velocity of rotation DC motor controller with SMS based on microcontroller could be made successfully. This device can rotate DC motor by the command SMS as the same as direction and velocity which is wanted and can be send direction and velocity of rotate DC motor report.
Key words : SMS (Short Message Service), microcontroller AT90S2313, PWM (Pulse Width Modulation)
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yesus Kristus atas segala kasih karunia, anugerah, dan berkat-Nya, sehingga penulis dapat menyelesaikan penulisan tugas akhir ini dengan baik.
Penulis menyadari bahwa dalam penulisan tugas akhir ini, penulis mendapatkan banyak bantuan dan dorongan dari berbagai pihak. Oleh karena itu, pada kesempatan ini dengan segala kerendahan hati dan penuh hormat, penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC Selaku Dekan Fakultas Teknik Universitas Sanata Dharma Yogyakarta.
2. Bapak A. Bayu Primawan, S.T., M.Eng selaku Ketua Jurusan Teknik Elektro Universitas Sanata Dharma Yogyakarta dan selaku pembimbing II yang membimbing dan mengarahkan dalam penyusunan tugas akhir ini. 3. Bapak Martanto, S.T, M.T selaku pembimbing I atas segala pemikiran,
waktu dan tenaganya dalam membimbing dan mengarahkan penulis dari awal hingga akhir.
4. Seluruh dosen di Fakultas Teknik Elektro yang tidak dapat di sebutkan satu persatu, yang telah mendidik dan membimbing penulis dalam memperdalam dunia Teknik Elektronika.
6. Kedua orang tua penulis yang telah memberikan doa, dorongan moril maupun material, kasih dan kesabaran yang tak pernah putus sehingga penulis dapat menyelesaikan tugas akhir ini.
7. Kedua adikku Alphi dan Tika yang telah memberi doa dan pengharapan dalam menyelesaikan tugas akhir ini. Terima kasih atas kesabarannya menunggu komputer.
8. Kekasihku Veny dan keluarga yang memberi dukungan doa, semangat, waktu, cinta kasihnya dan kesabarannya serta menjadi tempat peraduan dalam kepenatan.
9. My Big Family Padepokan Pomahan : Mas Gede, Mbak Nyoman, Putu, Mas Alex, Mbak Ria, Mas Bowo, Mbak Yuli, Kang Ucup, Sumanto, Vita. Aku takkan melupakan kalian.. Kutunggu kalian di Jakarta..
10. Ma Prend MARCOPOLO TEAM : Gepenk, Memet, Plenthonx, Andex, Deri, Nango, Lambe, Ahok, Nonox, Denny, Nova. I Love U ALL!! terima kasih atas canda, tawa dan segalanya prend. Jangan kebanyakan delit-delit!!
11. Teman-teman teknik Elekro yang sudah membantu : Robby, Briatma, Iyok, Sinung, Lele, Tikus, Hari, Dwi, Eric, Spadic, Koten, Rina, Andis, Ido, Danny, Denny. Selalu semangat teman!!
yang akan kalian dapatkan nanti, terutama di dunia kerja yang menuntut totalitas, kedisiplinan dan attitude yang baik. Keep contact..
13. Sohib-sohibku : Wawan, Katrek, Mbantul, Kriwul, Kobo, Harto, Berti Saat-saat dimana kita ngekek bareng adalah saat yang akan slalu dirindukan..Jangan lupakan persahabatan kita!! Selalu kumpul dan makan-makan cuy..
14. Bapak kostku Pak Wakidi dan alm Ibu, Iksan, mas Yudi dan keluarga, dan segenap warga Paingan yang sudah seperti keluarga sendiri, terima kasih sudah menerima penulis dan berhubungan baik dengan penulis.
15. Teman-teman mahasiswa jurusan Teknik Elekro dan semua pihak yang tidak dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari penulisan tugas akhir ini. Oleh karena itu segala kritik dan saran yang bersifat membangun sangat penulis harapkan.
Akhir kata penulis berharap agar skripsi ini dapat bermanfaat bagi penulis maupun pembaca semuanya.
Yogyakarta, 20 September 2007
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA... v
MOTO DAN PERSEMBAHAN... vi
INTISARI... vii
ABSTRACT
... viiiKATA PENGANTAR
... ixDAFTAR ISI
... xiiDAFTAR TABEL... xvi
DAFTAR GAMBAR ... xvi
BAB I. PENDAHULUAN... 1
1.1 Judul……… 1
1.2 Latar Belakang ... 1
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ... 3
1.5 Rumusan Masalah... 3
1.6 Batasan Masalah ... 4
1.7 Metedologi Penelitian ... 5
BAB II. DASAR TEORI... 7
2.1 Pulse Width Modulation... 7
2.2 Mikrokontroler AVR AT90S2313………... 8
2.2.1 Arsitektur Mikrokontroler AVR AT90S2313……… 9
2.2.2 Organisasi Memori………... 10
2.2.3 Hardware AT90S2313………... 11
2.2.4 Port I/O………... 12
2.2.5 Instruksi Pada Mikrokontroler AVR AT90S2313……… 15
2.2.6 Mode Pengalamatan Memori Data……….... 15
2.2.7 Pheripheral Mikrokontroler AVR AT90S2313……… 16
2.2.7.1 Timer/Counter……… ... 16
2.2.7.2 Universal Asynchronous Receiver Transmitter... 17
2.3 Motor DC...……… 17
2.4 Siemens C35 ... 19
2.5 AT Command... 21
2.6 Short Message Service (SMS) ... 23
2.7 Protocol Data Unit (PDU) ... 23
2.7.1 SMS Deliver... 24
2.7.2 SMS Submit... 25
2.8 Rangkaian Sensor... 26
2.8.1 Optocoupler... 26
2.8.2 Piringan Bercelah... 27
2.9 Rangkaian Inverter Menggunakan Transistor... 28
BAB III PERANCANGAN PENELITIAN ... 31
3.1 Diagram Blok ... 31
3.2 Perancangan Perangkat Keras ... 33
3.2.1 Mikrokontroler AVR AT90S2313 ... 33
a. Reset Eksternal... 33
b. Osilator... 35
3.2.2 Driver Motor DC... 36
3.2.3 Karakteristik Motor DC ... 37
3.2.4 Rangkaian Sensor... 44
a. Sensor Arah Putar... 44
a. Sensor Kecepatan ... 47
3.2.5 Transistor Sebagai Saklar... 48
3.3 Perancangan Perangkat Lunak ... 50
3.3.1 Inisialisasi Periferal... 50
3.3.2 Inisialisasi UART... 51
3.3.3 Kerangka Utama Program... 52
a. Program Baca SMS ... 55
b. Program pengaturan kecepatan dengan PWM ... 56
c. Program membaca hasil sensor ... 59
d. Program mengirim SMS ... 62
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN... 68
4.3 SMS Pantauan Hasil Pengukuran Sensor ... 75
4.4 Pembacaan Perintah SMS ... 77
4.5 Rangkaian Sensor... 79
BAB V. Kesimpulan dan Saran
... 845.1 Kesimpulan ... 84
5.2 Saran ... 85
DAFTAR PUSTAKA
DAFTAR TABEL
1. Tabel 2.1 Fungsi Alternatif Port B ... 13 2. Tabel 2.2 Fungsi Alternatif Port D ... 14 3. Tabel 3.1 Tabel keadaan driver motor... 37 4. Tabel 3.2 Hubungan antara duty cyle(%), tegangan motor DC dan
kecepatan putar motor DC (RPM) ... 39 5. Tabel 3.3 Hubungan rentang duty cycle, rentang kecepatan (RPM)
Dan persamaan garis ... 41 6. Tabel 3.4 Hubungan kecepatan (RPM) dengan duty cycle (%) pada arah CW dan CCW ... 43 7. Tabel 3.5 Hubungan kecepatan putar (RPM) terhadap nilai data
PWM... ... 57 8. Tabel 3.6 Konversi ASCII ke PDU ... 66 9. Tabel 4.1 Pembacaan SMS terhadap beberapa operator telepon...
DAFTAR GAMBAR
1. Gambar 2.1 Kontrol PWM ... 7
2. Gambar 2.2 Diagram Blok AT90S2313 ... 10
3. Gambar 2.3 Peta memori AVR AT90S2313 ... 11
4. Gambar 2.4 Konfigurasi Pin mikrokontroler AT90S2313 ... 11
5. Gambar 2.5 Putaran jangkar searah jarum jam... 18
6. Gambar 2.6 Gaya tarik dan gaya tolak magnet berhenti ... 18
7. Gambar 2.7 Jangkar yang berputar akibat adanya kesamaan kutub. 19 8. Gambar 2.8 Telepon seluler Siemens C35 ... 20
9. Gambar 2.9 Pin eksternal Siemens C35 tampak bawah... 20
10. Gambar 2.10 Format PDU untuk SMS deliver... 25
11. Gambar 2.11 Format PDU untuk SMS submit... 26
12. Gambar 2.12 Rangkaian optocoupler yang terdiri dari LED dan fototransistor ... 26
13. Gambar 2.13 Rangkaian transistor sebagai saklar ... 28
14. Gambar 3.1 Diagram blok rancangan sistem pengendali jarak jauh arah dan kecepatan putar motor DC via sms berbasis mikrokontroler AT90S2313 ... 31
15. Gambar 3.2 Rangkaian reset eksternal ... 34
16. Gambar 3.3 Osilator kristal yang dihubung ke mikrokontroler AT90S2313... ... 36
17. Gambar 3.4 Kontrol motor DC dua arah ... 36
20. Gambar 3.7 Rangkaian Sensor dengan motor DC, piringan bercelah dan tiga buah optocoupler... 44 21. Gambar 3.8 Rangkaian sensor putaran motor menggunakan
optocoupler ... 46 22. Gambar 3.9 Rangkaian transistor sebagai saklar ... 48 23. Gambar 3.10 Diagram alir sistem pengendali jarak jauh arah dan
kecepatan putar motor DC via SMS ... 54 24. Gambar 3.11 Diagram alir program untuk membaca SMS ... 55 25. Gambar 3.12 Diagram alir program untuk pengaturan kecepatan
putar motor DC... 58 26. Gambar 3.13 Diagram alir program membaca hasil sensor arah
putar... ... 59 27. Gambar 3.14 Diagram alir program membaca hasil sensor
kecepatan... ... 61 28. Gambar 3.15 Diagram alir program mengirim SMS ... 66 29. Gambar 4.1 Alat pengendali jarak jauh arah dan kecepatan putar
motor DC memanfaatkan fasilitas SMS ... 68 30 Gambar 4.2 Grafik kecepatan putar motor DC berdasarkan
pengukuran tachometer... 70 31. Gambar 4.3 Bentuk gelombang yang dihasilkan PWM saat Toff
pada mikrokontroler AT90S2313... 72 32. Gambar 4.4 Bentuk gelombang yang dihasilkan PWM saat Ton
pada mikrokontroler AT90S2313... 73 33. Gambar 4.5 Grafik error duty cycle hasil pengukuran terhadap
33. Gambar 4.6 Grafik hubungan antara SMS pantauan hasil pengukuran rangkaian sensor dan kecepatan putar motor DC yang diukur dengan alat ukur tachometer... 76 34. Gambar 4.7 Rangkaian sensor menggunakan optocoupler... 80
34. Gambar 4.8 Tegangan pada output rangkaian sensor saat terhalang ... 81 35. Gambar 4.7 Tegangan pada output rangkaian sensor saat tidak
BAB I
Pendahuluan
1.1. Judul
Pengendali Jarak Jauh Arah dan Kecepatan Putar Motor DC via SMS Berbasis Mikrokontroler AT90S2313.
1.2. Latar Belakang Masalah
Teknologi elektronika dan komunikasi sudah berkembang sangat pesat. Telepon seluler merupakan salah satu contohnya. Penggunaan telepon seluler di Indonesia selalu meningkat dari tahun ke tahun. Penggunanya sudah menjangkau ke semua golongan baik golongan atas, menengah maupun golongan bawah.
Telepon seluler banyak dipilih oleh masyarakat karena teknologinya yang sudah tidak lagi menggunakan kabel (wireless), jangkauan yang semakin luas serta fasilitas-fasilitas menarik yang disediakan oleh para operator. Salah satu fasilitas yang disediakan operator dan paling banyak digunakan para pengguna telepon seluler adalah fasilitas SMS (Short Message Service).
inilah maka SMS dijadikan bagian utama dari layanan-layanan standar sistem komunikasi lain seperti CDMA dan telepon rumah.
Berdasarkan pada hal-hal tersebut, maka pada penelitian ini akan dirancang sebuah alat yang memanfaatkan fasilitas SMS sebagai pengendali jarak jauh (wireless). Obyek yang akan dikendalikan oleh SMS adalah motor DC. Motor DC dipilih sebagai obyek yang dikendalikan karena melihat dari kegunaan yang dimiliki oleh motor DC. Motor DC banyak digunakan di dalam dunia industri maupun pendidikan.
Untuk membuat pengendali jarak jauh ini maka fasilitas SMS akan dipadukan dengan mikrokontroler. Mikrokontroler digunakan sebagai antar muka telepon seluler dan motor DC. Selain itu penggunaan mikrokontroler bertujuan agar rangkaian alat ini menjadi lebih sederhana. Sebagai driver motor DC digunakan IC (Integrated Circuit) L293D. Untuk pengaturan kecepatan putar dari motor DC digunakan sistem Pulse Width Modulation (PWM) yang memanfaatkan pengaturan lebar pulsa. Sedangkan sensor pendeteksi arah dan kecepatan putarnya digunakan optocoupler dan piringan bercelah.
1.3. Tujuan Penulisan
1.4. Manfaat Penulisan
1.4.1. Manfaat bagi masyarakat umum adalah:
a. Menambah pengetahuan bahwa aplikasi mikrokontroler yang digabung dengan fasilitas SMS pada telepon seluler dapat digunakan sebagai pengendali jarak jauh.
b. Masyarakat dapat menggunakan alat pengendali jarak jauh ini sebagai alternatif lain dari sistem kendali jarak jauh yang sudah ada.
1.4.2. Manfaat bagi penulis adalah:
a. Penulis dapat menguasai mikrokontroler terutama AT90S2313 secara baik dan dapat mengaplikasikannya dalam pembuatan alat pengendali jarak jauh arah dan kecepatan putar motor DC.
b. Penulis dapat lebih mengetahui tentang sistem Pulse Width Modulation (PWM).
c. Penulis dapat mengaplikasikan penggunaan fasilitas SMS dari operator seluler selain sebagai alat komunikasi yaitu sebagai pengendali jarak jauh pada motor DC.
1.5. Rumusan Masalah
Mikrokontroler ini berfungsi sebagai antar muka telepon seluler Siemens C35 dengan rangkaian motor DC. Mikrokontroler ini akan mengatur arah putar dari motor DC dan juga akan menangani sistem PWM yang berfungsi mengatur kecepatan dari motor DC sesuai perintah SMS. Untuk penggerak motor DC digunakan IC L293D.
Setelah motor DC berputar maka arah dan kecepatan putarnya dideteksi oleh rangkaian sensor. Rangkaian sensor ini terdiri dari tiga buah optocoupler dan piringan bercelah. Setelah terdeteksi arah dan kecepatannya maka mikrokontroler akan menentukan arah putar dan menghitung kecepatannya. Selanjutnya data tersebut dikirimkan ke telepon seluler Siemens C35 yang ada pada alat. Telepon seluler tersebut secara otomatis langsung mengirimkan hasil pantauan arah dan kecepatan putar motor DC ke pengirimnya.
1.6. Batasan Masalah
Pengendali jarak jauh arah putar dan kecepatan motor DC via SMS ini memiliki batasan masalah antara lain:
a. Mengendalikan arah dan kecepatan putar motor DC lewat SMS. b. Memantau arah dan kecepatan putar motor DC lewat SMS.
c. Aplikasi hanya digunakan pada motor DC 12 volt dengan kecepatan putar 400 RPM sampai 4000 RPM dengan peningkatan 100 RPM. d. Menggunakan telepon seluler Siemens C35.
1.7. Metodologi Penelitian
Penulis melakukan penelitian dengan melakukan metodologi sebagai berikut:
a. Mengumpulkan referensi dan literatur dari perpustakaan dan internet. b. Menyusun referensi dan literatur yang ada dengan berkonsultasi
dengan dosen pembimbing.
c. Perancangan alat yang terkonsep meliputi perancangan perangkat lunak dan perangkat keras.
d. Pembuatan alat berdasarkan pada hasil perancangan. e. Pengujian alat dan pengambilan data.
f. Penarikan kesimpulan berdasarkan pengujian alat dan pengambilan data.
g. Penyusunan laporan.
1.8. Sistematika Penulisan
Sistematika penulisan terdiri dari lima bab yaitu:
BAB I : Bab pendahuluan yang membahas tentang latar belakang masalah, tujuan penelitian, manfaat penelitian, rumusan masalah, batasan masalah dan metodologi penelitian.
BAB II : Bab Dasar Teori yang membahas tentang landasan teori yang dipakai untuk mendukung penelitian ini.
BAB IV : Bab Pembahasan yang membahas tentang hasil pengujian alat dan analisa dari data hasil pengujian.
BAB II
Dasar Teori
2.1.Pulse Width Modulation
Pulse Width Modulation merupakan suatu sistem yang membandingkan antara tegangan segitiga yang konstan dengan tegangan DC yang berubah-ubah.
Dari perbandingan tersebut didapatkan tegangan kotak yang memiliki duty cycle
tertentu. Duty cycle adalah perbandingan periode saat gelombang tersebut ON
(bernilai logika satu) dengan periode total untuk satu pulsa.
Gambar 2.1 Kontrol PWM [1].
Kecepatan putar motor DC dapat diatur dengan menggunakan PWM.
Kontrol pada PWM dapat dilihat pada gambar 2.1. Vr menunjukan tegangan
segitiga, Vc menunjukan tegangan DC sedangkan Ar dan Ac menunjukan
amplitudo tegangan segitiga dan tegangan DC. δm menunjukan lebar pulsa saat
Pengaturan kecepatan putar motor DC tersebut dilakukan dengan mengatur
duty cycle dari tegangan kotak yang diberikan terhadap motor. Semakin besar duty
cycle dari tegangan kotak semakin besar pula kecepatan motor yang dihasilkan.
Begitu juga sebaliknya semakin kecil duty cycle dari tegangan kotak maka
semakin lambat kecepatan putar motor DC tersebut.
Duty Cycle (%) ×100% +
=
OFF ON
ON
T T
T
(2.1)
Dengan:
TON = saat pulsa PWM bernilai 1
TOFF = saat pulsa PWM bernilai 0
2.2. Mikrokontroler AVR AT90S2313
Mikrokontroler adalah salah satu dari bagian dasar dari suatu sistem
komputer. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu
komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari
elemen-elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan
output spesifik berdasarkan input yang diterima dan program yang dikerjakan [2].
Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan
instruksi-instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan
utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat
oleh seorang programmer. Program ini menginstruksikan komputer untuk
melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas
2.2.1Arsitektur Mikrokontroler AVR AT90S2313
Mikrokontroler AVR AT90S2313 merupakan mikrokontroler CMOS
dengan daya rendah yang memiliki arsitektur AVR RISC (Reduced
Instruction Set Computer) 8 bit. Arsitektur ini mendukung kemampuan
untuk melaksanakan eksekusi dalam satu siklus clock osilator. AVR
memiliki fitur untuk menghemat konsumsi daya yaitu dengan mode sleep.
Mode sleep dalam mikrokontroler AVR ada dua macam yaitu mode idle dan
modepower-down [3].
Mikrokontroler AVR memiliki model arsitektur Harvard di mana
memori dan bus untuk program dan data dipisahkan. Dalam arsitektur AVR
ini, 32 register umum terhubung langsung ke ALU processor. Hal ini yang
membuat AVR memiliki kecepatan tinggi dalam mengeksekusi instruksi.
Dalam satu siklus clock terdapat dua register independen yang dapat
diakses oleh satu instruksi. Teknik yang digunakan adalah fetch during
execution atau memegang sambil mengerjakan. Hal ini berarti, dua operan dibaca dari dua register, dilakukan eksekusi operasi dan hasilnya disimpan
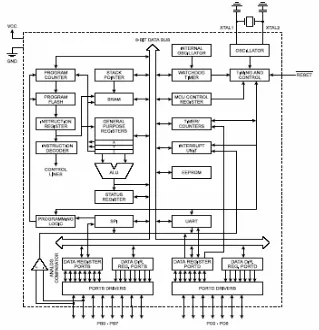
kembali dalam satu register. Proses ini dilakukan dalam satu siklus clock. Blok diagram mikrokontroler AT90S2313 ditunjukan dalam gambar 2.2.
Dari 32 register yang ada, enam register dapat digunakan untuk
pengalamatan tak langsung 16 bit sebagai register pointer. Register tersebut
memiliki nama-nama khusus yaitu: register X yang terdiri dari sepasang
register R26:R27, register Y yang terdiri dari sepasang register R28:R29 dan
Gambar 2.2. Diagram Blok AT90S2313.
2.2.2Organisasi memori
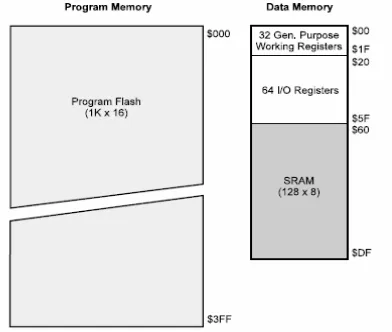
Pada organisasi AVR, 32 register keperluan umum menempati space
data pada alamat terbawah, yaitu $00 sampai $1F. Sedangkan untuk
register-register khusus, untuk penanganan I/O dan kontrol terhadap mikrokontroler
menempati 64 alamat mulai dari $20 sampai $5F.
Register-register ini merupakan register-register khusus yang
digunakan untuk melakukan pengaturan fungsi terhadap berbagai peripheral
pada lokasi $60 sampai $DF. Peta memori AVR AT90S2313 ditunjukan
pada gambar 2.3.
Gambar 2.3. Peta memori AVR AT90S2313.
2.2.3Hardware AT90S2313
AT90S2313 beredar dalam dua jenis kemasan yaitu 20 DIP dan 20
SOIC. Kemasan ini tidak memerlukan instalasi kabel yang melibatkan
banyak jalur sebagaimana pada mikrokontroler dengan jumlah pin diatas 40
buah. Konfigurasi pin pada mikrokontroler AT90S2313 ditunjukan pada
gambar 2.4.
Fungsi dari masing-masing pin adalah:
a. VCC untuk power supply
b. GND untuk ground
c. Port B (PB7-PB0) merupakan port I/O 8 bit bidirectional. Buffer
portB dapat mencatu arus hingga 20 mA.
d. Port D (PD6-PD0) merupakan tujuh buah pin I/O bidirectional.
Seperti halnya port B, port D juga mampu mencatu arus hingga 20mA.
e. RESET merupakan reset input. Reset akan aktif saat pin ini berada
pada kondisi logika rendah “0” lebih dari 50ns.
f. XTAL1 merupakan input untuk inverting oscillator amplifier dan
input bagi clock internal.
g. XTAL2 merupakan output untuk inverting oscillator amplifier.
2.2.4Port I/O
Mikrokontroler AVR AT90S2313 memiliki dua buah port I/O yaitu:
a.Port B
Port B merupakan port I/O 8 bit bidirectional yang masing-masing pinnya dapat dikonfigurasi secara individual. Masing-masing-masing
pin dalam port ini juga memiliki fasilitas berupa resistor pull-up
Ada tiga buah alamat memori yang khusus digunakan untuk
menangani fungsi port B yaitu:
i. Data register (PORTB) yang berlokasi pada $18, register ini dapat ditulis maupun dibaca.
ii. Data Direction register port B (DDRB) yang berlokasi pada
$17, register ini dapat ditulis atau dibaca.
iii. Port B input pin (PINB), berlokasi pada $16. PINB bukanlah
suatu register, namun pin-pin fisik pada hardware
mikrokontroler. Pin ini hanya dapat dibaca.
Beberapa pin pada port B memiliki fungsi alternatif yang dapat digunakan sesuai kebutuhannya. Pin-pin tersebut adalah PB0, PB1,
PB3, PB5 dan PB7. Fungsi-fungsi alternatif tersebut dapat ditunjukan
pada tabel 2.1.
Tabel 2.1 Fungsi Alternatif Port B [3].
Port Pin Fungsi Alternatif
PB0 AIN0(Analog Comparator Positive Input)
PB1 AIN0(Analog Comparator Negatif Input)
PB3 OC1(Timer/Counter1 Output Compare Match Output)
PB5 MOSI(Data Input Line for Memory Downloading)
PB6 MISO(Data OutputLline for Memory Uploading)
b.Port D
Port D memiliki tiga buah lokasi memori yang berkaitan dengan penggunaanya sebagai port I/O. Memori-memori tersebut adalah:
i. PORTD (Data Direction) berlokasi pada $12.
ii. DDRD (Data Direction Register port D) berlokasi pada $11. iii. PIND (Port D Input Pins) berlokasi pada $10. PIND bukanlah
register. PIND hanya dapat dibaca.
Format Port D hampir sama dengan Port B dalam hal
konfigurasi I/O dan dalam penggunaan resistor pull-up. Hal yang
membedakan dengan Port B adalah jumlah pin yang bisa digunakan
hanya 7 buah, karena sesuai dengan jumlah pin yang ada pada Port D.
Pin-pin pada Port D juga memiliki fungsi alternatif lain. Fungsi-fungsi alternatif lain tersebut ditunjukan pada tabel 2.2.
Tabel 2.2. Fungsi alternatif Port D [3]. Port Pin Fungsi Alternatif
PD0 RXD (Receive Data Input for the UART)
PD1 TXD (Transmit Data Output for the UART)
PD2 INT0 (External Interrupt 0 Input)
PD3 INT1 (External Interrupt 1 Input)
PD4 T0 (Timer/Counter External Input)
PD5 T1 (timer/Counter External Input)
2.2.5Instruksi pada Mikrokontroler AVR AT90S2313
AT90S2313 memiliki 118 instruksi yang dapat dikelompokkan dalam
4 bagian yaitu: 22 instruksi aritmatik dan logika, 34 instruksi percabangan,
31 instruksi transfer data, dan 31 buah instruksi operasi bit. Terdapat juga
beberapa operasi skip yang dapat melewati sebuah instruksi setelah suatu instruksi tes dilakukan.
Seluruh register dalam AT90S2313 dapat dipergunakan sebagai
akumulator, setengah bagian bawah register file digunakan untuk nilai
segera (immediate value). Hampir seluruh op code AT90S2313 mempunyai
panjang 16-bit, hanya 2 instruksi mempunyai panjang 32-bit yaiu, LDS
(Load Direct from Data Space) dan STS (Store Direct to Data Space).
2.2.6 Mode Pengalamatan Memori Data
Terdapat lima buah pengalamatan memori data yang dapat dilakukan
yaitu :
1. Pengalamatan Langsung (Direct Adressing).
2. Pengalamatan tak Langsung (Indirect Adressing)
3. Pengalamatan tak Langsung dengan Displacement (Indirect
Adressing with Displacement)
4. Pengalamatan tak Langsung dengan Post-increment(Indirect
Adressing with Post-increment).
5. Pengalamatan tak Langsung dengan Pre-decrement(Indirect
2.2.7 Peripheral Mikrokontroler AVR AT90S2313
Mikrokontroler AVR dilengkapi dengan beberapa peripheral utama
yang meliputi Timer/Counter, Watchdog Timer, EEPROM, Analog
Comparator dan UART. Untuk dapat mengkonfigurasi fungsi dari
peripheral-peripheral tersebut maka yang harus dilakukan adalah mengatur
setting bit pada register kontrol yang bersangkutan. Beberapa peripheral
yang digunakan pada penelitian ini adalah:
2.2.7.1 Timer/Counter
AT90S2313 memiliki 2 buah timer/counter yang masing-masing
mempunyai seleksi prescaler terpisah dari sebuah prescaler yang sama. Kedua timer/counter tersebut adalah timer/counter0 dan timer/counter1.
Timer/Counter0 merupakan 8-bit Timer/Counter dapat dipergunakan sebagai timer dengan sumber clock diambil dari pin T0 (Fungsi lain dari
port D.4). Timer/Counter0 biasa dinamakan dengan TCNT0.
Register-register yang berhubungan dengan penggunaan Timer/Counter0 adalah
TCCR0 (Timer/Counter0 Control Register), TIFR (Timer/Counter0
Interrupt Flag Register) dan TIMSK (Timer/Counter0 Interrupt Mask
Register).
Timer/Counter1 merupakan 16-bit Timer/Counter yang dapat
digunakan sebagai timer dengan sumber clock dari prescaler CK atau
sebagai counter dengan sumber clock dari pin T1 (Fungsi lain dari Port
D.5). Timer Counter1 dapat juga digunakan sebagai PWM (Pulse Width
melibatkan register OCR1. Register-register yang berhubungan dengan
pengaturan Timer/Counter1 adalah TCCR1B, TIFR dan TIMSK.
2.2.7.2. Universal Asynchronous Receiver Transmitter
AT90S2313 dilengkapi dengan Full Duplex Universal Asynchronous
Transmitter (UART). Fasilitas komunikasi ini sangat bermanfaat agar sistem aplikasi AVR dapat berkomunikasi dengan sistem lain seperti PC atau
jaringan sistem kendali lainnya. Selain itu UART ini memiliki kemampuan
antara lain:
1. Baud Rate Generator yang dapat membangkitkan berbagai
macam kecepatan pengiriman (baud rate-bps).
2. Baud Rate yang tinggi pada kristal berfrekuensi rendah.
3. Mode pengiriman data 8 atau 9 bit.
4. Noise Filtering. 5. Overrun Detection.
6. Framming Error Detection.
7. False Start Bit Detection.
8. Tiga interupsi terpisah untuk TX complete, TX Data register
Empty, dan RX complete.
2.3.Motor DC
Motor listrik menggunakan energi listrik dan energi magnet untuk
menghasilkan energi mekanis. Tujuan dari motor adalah menghasilkan gaya yang
menggerakkan (torsi). Motor DC digunakan dimana kontrol torsi dan kecepatan
Motor DC memanfaatkan elektromagnetik untuk medan sekunder atau fluks
jangkar. Arus mengalir melalui kumparan jangkar dari sumber tegangan DC,
menyebabkan jangkar beraksi sebagai magnet. Kutub jangkar ditarik kutub medan
dari polaritas yang berbeda. Hal tersebut menyebabkan jangkar berputar. Putaran
jangkar searah jarum jam dapat ditunjukan pada gambar di 2.5.
Gambar 2.5. Putaran jangkar searah jarum jam [4].
Apabila kutub jangkar segaris dengan kutub medan, sikat-sikat ada pada
celah di komutator dan tidak ada arus yang mengalir pada jangkar. Keadaan
seperti itu membuat gaya tarik dan gaya tolak magnet berhenti. Berhentinya gaya
tarik dan gaya tolak magnet tersebut ditunjukan pada gambar 2.6.
Gambar 2.6. Gaya tarik dan gaya tolak magnet berhenti [4].
Komutator membalik arus jangkar ketika kutub yang tidak sama dari jangkar
dan medan berhadapan satu sama lain, sehingga membalik polaritas medan
menolak, menyebabkan jangkar berputar terus menerus. Hal tersebut ditunjukan
pada gambar 2.7.
Gambar 2.7 Jangkar yang berputar akibat adanya kesamaan kutub [4]. Arah putar motor DC ditentukan oleh arah arus yang mengalir pada jangkar
dan arah medan. Jika arah arus yang mengalir pada jangkar dan arah medan
dibalik maka putaran motor akan terbalik. Salah satu keistimewaan dari motor DC
adalah kemudahan dalam mengendalikan kecepatan. Kecepatan motor DC
berbanding langsung dengan harga tegangan yang diberikan pada jangkar.
Semakin tinggi tegangan jangkar semakin tinggi kecepatan motor. Beberapa
karakteristik motor DC adalah:
a.Torsi tinggi pada kecepatan rendah.
b.Pengaturan kecepatan bagus pada seluruh rentang.
c.Kemampuan mengatasi beban lebih baik.
d.Pemeliharaan dan perbaikan yang diperlukan lebih rutin.
2.4. Siemens C35
Siemens C35 mulai dipasarkan sejak tahun 2002. Telepon seluler ini
memiliki ukuran 118 x 46 x 21mm dan berat 110 gram. Selain itu Siemens C35
melody composer, SMS, alarm, kalkulator dan stopwatch [5]. Telepon seluler Siemens C35 ditunjukan pada gambar 2.8.
Gambar 2.8. Telepon seluler Siemens C35 [6].
Telepon Seluler Siemens C35 merupakan telepon genggam kelas
menengah (middle end) yang cukup populer di masanya. Selain karena bentuknya yang kecil dan ramping, pengoperasiannya juga tidak terlalu rumit sehingga
disukai banyak pengguna telepon seluler. Secara teknis, telepon seluler Siemens
C35 juga memiliki daya RF yang cukup tinggi dan sensitivitas penerima yang
baik sehingga dapat diandalkan di daerah-daerah yang level amplitudo sinyalnya
rendah [7].
Siemens C35 juga memiliki pin konektor eksternal yang dapat
dimanfaatkan untuk pengendalian telepon seluler dari luar dengan piranti bantu
mikrontroler ataupun PC (Personal Computer). Komunikasi data antara perangkat yang akan dirancang dengan telepon seluler Siemens C35 menggunakan kabel
penghubung tanpa rangkaian tambahan. Pin eksternal pada Siemens C35
ditunjukan pada gambar 2.9.
ATAS 12
1
Komunikasi data antara perangkat yang akan dirancang dengan telepon
seluler Siemens C35 menggunakan kabel penghubung tanpa rangkaian tambahan.
Susunan pin eksternal Siemens C35 adalah sebagai berikut:
1. Ground
2. Self-Service Recognition/control battery charger
3. Load Charging voltage & POWER (ignition)
4. No Connection
5. Data output
6. Data input
7. ZUB clock Recognition/control accessories
8. ZUB data Recognition/control accessories
9. Ground untuk microphone
10. Microphone input
11. Loudspeaker
12.Ground untuk external speaker
2.5.AT Command
Siemens C35 menggunakan instruksi AT Command ( AT Command Set)
untuk pengoperasian perangkat telepon seluler tersebut. AT Command merupakan
instruksi yang dipergunakan untuk mengendalikan telepon seluler dengan piranti
luar seperti komputer dan mikrokontroler. Berbagai fungsi telepon seluler
memiliki instruksi tersendiri seperti SMS, telepon, WAP, GPRS dan lain
Untuk pengendali jarak jauh arah dan kecepatan putar motor DC via SMS
berbasis mikrokontroler AT90S2313 ini digunakan instruksi AT Command yang
berkaitan dengan SMS. Instruksi-instruksi yang dapat dipergunakan meliputi:
a.AT+CSMS, instruksi yang dipergunakan untuk memilih layanan
pada operator.
b.AT+CPMS, instruksi yang dipergunakan untuk memilih lokasi SMS
disimpan pada memori EEPROM.
c.AT+CMGF, menentukan format SMS.
d.AT+CSCA, nomor layanan SMS dari operator.
e.AT+CNMI, mendeteksi dan menampilkan SMS yang baru masuk.
f.AT+CNMA, keluaran langsung dari SMS.
g.AT+CMGL, instruksi untuk mendaftar SMS masuk.
h.AT+CMGR, instruksi untuk membaca SMS.
i.AT+CMGS, instruksi untuk mengirimkan SMS.
j.AT+CMSS, Instruksi untuk mengirimkan SMS yang telah berada di
memori EEPROM.
k.AT+CMGW, Instruksi untuk menulis dan menyimpan SMS di
memori EEPROM.
l.AT+CMGD, instruksi untuk menghapuskan SMS yang berada di
2.6. Short Message Service (SMS)
Short Message Service (SMS) merupakan fasilitas pengiriman pesan singkat antar telepon seluler yang terdapat khusus pada telepon seluler digital. Dikatakan
pesan singkat karena pengiriman pesannya dibatasi dalam beberapa karakter
tertentu. SMS dikirim dari telepon seluler ke telepon seluler lain harus melewati
Short Message Service Center (SMSC) yang akan menyimpan sementara pesan yang dikirim lalu meneruskannya pada penerima [8].
Apabila penerima pesan dalam keadaan tidak aktif atau berada di luar
jangkauan operator maka SMSC akan menyimpan pesan sementara dan
mengirimkan lagi apabila penerima sudah memungkinkan untuk menerima pesan.
Fasilitas SMS dapat dihubungkan langsung dengan perlengkapan terminal luar
seperti PC untuk mengontrol SMS pada telepon seluler.
Koneksi antara perlengkapan terminal luar dengan SMS pada telepon seluler
dapat diwujudkan dengan serial kabel, bluetooth, infra merah, dan lain-lain.
Aturan-aturan antarmukanya berdasarkan pada AT Commands.
2.7. Protocol Data Unit (PDU)
Ada dua cara atau mode dalam pengiriman dan penerimaan pesan SMS yaitu
dengan mode teks dan mode PDU. Dalam mode PDU pesan yang dikirim tidak
hanya berisi teks tetapi juga berisi informasi-informasi penting lainnya seperti
nomor SMSC (Short Message Service Centre), nomor pengirim atau penerima,
validitas waktu, waktu pengiriman, dan lain-lain.
Cara penulisan dalam mode PDU ini adalah dalam bentuk
perpindahan SMS menggunakan mode PDU dibedakan menjadi dua yaitu SMS
deliver dan SMS submit.
2.7.1SMS Deliver
SMS deliver adalah pesan yang diterima oleh telepon seluler dari SMSC. Ada delapan header SMS deliver yaitu:
a. Service Centre Address (SCA) Berisi informasi SMS Centre.
b. TPDU Type Identifier (ID)
Berisi informasi jenis dari PDU tersebut.
c. Originating Address (OA)
Berisi informasi nomor pengirim.
d. Protocol Identifier (PID)
Berisi informasi identifikasi protokol yang digunakan.
e. Data Coding Scheme (DCS)
Berisi informasi skema pengkodean data yang digunakan.
f. Service Centre Time Stamp (SCTS) Berisi informasi waktu.
g. User Data Length (UDL)
Berisi informasi panjang dari data yang dibawa.
h. User Data (UD)
Berisi informasi data utama yang dibawa.
PDU harus ditulis berdasarkan format yang telah ditetapkan. Format
Gambar 2.10. Format PDU untuk SMS deliver [9].
2.7.2 SMS Submit
SMS Submit adalah pesan yang dikirim oleh telepon seluler ke SMSC. Ada sembilan header SMS submit yaitu:
a. Service Centre Address (SCA)
Berisi informasi SMS Centre.
b. TPDU Type Identifier (ID)
Berisi informasi jenis dari PDU tersebut.
c. Message Reference (MR)
Parameter yang mengindikasikan nomor referensi SMS Submit.
d. Destination Address (DA)
Berisi informasi nomor alamat yang dituju.
e. Protocol Identifier (PID)
Berisi informasi identifikasi protokol yang digunakan.
f. Data Coding Scheme (DCS)
Berisi informasi skema pengkodean data yang digunakan.
g. Validity Period (VP)
Berisi jangka waktu validitas pesan pada jaringan.
h. User Data Length (UDL)
Berisi informasi panjang dari data yang dibawa.
i. User Data (UD)
Sembilan header SMS submit ditulis berdasarkan format PDU untuk
SMS submit. Format PDU untuk SMS submit ditunjukan pada gambar 2.11.
Gambar 2.11. Format PDU untuk SMS submit [9].
2.8. Rangkaian Sensor 2.8.1 Optocoupler
Optocoupler adalah suatu komponen elektronik yang terdiri dari LED
dan fototransistor. LED dalam optocoupler berfungsi sebagai sumber
cahaya. Sedangkan fototransistor berfungsi sebagai penerimanya. Rangkaian
LED yang mengaktifkan fototransistor ditunjukan pada gambar 2.12.
Gambar 2.12. Rangkaian optocoupler yang terdiri dari LED dan fototransistor [10].
Perubahan pada Vs mengakibatkan perubahan pada arus LED, dimana
perubahan arus akan masuk ke fototransistor. Di sisi lain hal ini akan
menghasilkan perubahan tegangan pada terminal kolektor-emiter. Oleh
karena itu tegangan sinyal akan digandeng dari rangkaian masukan ke
rangkaian keluaran [10]. Rumus untuk mencari besarnya Rs dapat dicari
If Vf Vs
Rs= − (2.2)
Sedangkan untuk mencari nilai Rc adalah:
V
cc−
V
c−
V
CE−
V
E=
0
(2.3)
V
cc−
I
C.
R
C−
V
CE=
0
(2.4)
C CE CC C
I V V
R = − (2.5)
Keuntungan penggunaan optocoupler ini adalah rangkaian menjadi
lebih sederhana karena di dalamnya sudah terdapat sumber cahaya sekaligus
penerimanya. Selain itu optocoupler lebih peka terhadap sensitivitas cahaya.
2.8.2. Piringan Bercelah
Piringan bercelah dirancang sebagai alat bantu untuk membaca
kecepatan dan mendeteksi arah putar motor DC. Piringan bercelah dibuat
pada dua keadaan yaitu gelap dan terang. Keadaan inilah yang dapat
mengaktifkan dan menonaktifkan optocoupler.
Banyaknya keadaan gelap atau keadaan terang dalam waktu tertentu
dapat dihitung sebagai kecepatannya. Piringan ini akan ditempelkan pada
2.9. Rangkaian Inverter Menggunakan Transistor
Transistor terbuat dari bahan semikonduktor. Transistor dibagi menjadi dua
jenis yaitu NPN dan PNP. Pada umumnya pemakaian komponen transistor pada
rangkaian elektronika dapat dibagi menjadi dua klasifikasi yaitu:
a) Transistor sebagai saklar
b) Transistor sebagai penguat
Sebagai switching transistor, daerah kerja transistor adalah di daerah
saturasi dan daerah cut off. Sedangkan sebagai penguat, transistor akan bekerja pada titik Q[11]. Rangkaian inverter menggunakan transistor mempunyai prinsip
dasar yang sama dengan transistor sebagai saklar.
Pada saat arus basis Ib= 0 maka transistor hanya melewatkan arus kolektor
Ic yang kecil, sehingga tegangan kolektor-emiter VCE mendekati Vcc. Keadaan ini
membuat transistor berada pada keadaan cut off. Pada saat arus basis Ib cukup besar bagi transistor untuk saturasi maka transistor melewatkan arus kolektor Ic
yang besar, sehingga tegangan kolektor-emitor VCE kecil. Tegangan ini
merupakan tegangan saturasi kolektor-emiter (VCE ) besarnya antara 0,2volt
sampai 0,3volt. Rangkaian inverter menggunakan transistor ditunjukan pada
gambar 2.13.
) (Sat
RB
VCC
VBB
RL
Arus kolektor saat saturasi dapat dicari dengan menggunakan rumus berikut:
RL V Vcc
Ic(Sat) = − CE(sat) Ampere (2-6)
dengan:
Ic(Sat) = arus kolektor pada saat saturasi (ampere)
VCE(Sat) = tegangan kolektor-emiter pada saat saturasi (volt)
RL = hambatan beban (ohm)
Dengan demikian, arus basis yang besarnya akan menimbulkan keadaan saturasi
adalah:
hfe Ic IbSat Sat
) ( )
( = Ampere (2-7)
dengan:
Ib(Sat) = arus basis pada saat saturasi (ampere)
Ic(Sat) = arus kolektor pada saat saturasi (ampere)
hfe = penguatan arus dc.
Pada persamaan 2-6 dapat ditentukan arus basis dalam setiap rangkaian
bias basis. Ibjuga dapat dicari dengan rumus:
Rb V V
Ib= BB − BE Ampere (2-8)
dengan:
VBB = tegangan basis (Volt)
VBE = tegangan basis-emitor (Volt)
Rb = hambatan pada basis (Ohm)
Tegangan kolektor-emiter pada saat penjenuhan adalah:
VCE = VCE(Sat)Volt (2-9)
2.10. Persamaan Garis Lurus
Persamaan garis lurus digunakan untuk mencari suatu persamaan diantara
dua titik yang membentuk suatu garis lurus. Rumus untuk mencari persamaan
garis lurus diantara 2 titik (x1,y1) dan (x2,y2) adalah:
c x m
y= . + (2.10)
dimana
1 2
1 2
x x
y y m
− −
= (2.11)
m c y m
x ⎟−
⎠ ⎞ ⎜
⎝ ⎛ ×
BAB III
Perancangan Penelitian
3.1 Diagram Blok
Pengendali jarak jauh arah dan kecepatan putar motor DC via SMS berbasis
mikrokontroler AT90S2313 adalah suatu alat pengendali jarak jauh yang dapat
mengendalikan motor DC dari jarak jauh sekaligus mampu mendeteksi arah putar
dan menghitung kecepatan putar motor DC tersebut. Kecepatan putar motor DC
dihitung dalam satuan rotation per minutes. Sedangkan arah putar motor DC
ditentukan dengan arah CW (clock wise) atau CCW (counter clock wise). Diagram blok dari sistem kerja alat ini ditunjukan pada gambar 3.1.
Telepon seluler A adalah telepon seluler pemberi perintah, sedangkan
telepon seluler B merupakan telepon seluler Siemens C35 yang terdapat pada alat.
Telepon seluler A memberi perintah dengan mengirim SMS berupa
“arah(spasi)kecepatan putar”. Untuk arah CW pada SMS disimbolkan dengan
tanda ‘+’ sedangkan untuk arah CCW disimbolkan dengan ‘-‘. Sebagai contoh
apabila kita ingin memutar motor dengan arah CW sebesar 4000 RPM maka
format SMS yang harus diketik adalah ‘+ 4000’.
Proses perpindahan SMS antara telepon seluler A dan telepon seluler B
melalui Short Message Service Center (SMSC) dan mengandalkan layanan
operator. Setelah SMS perintah yang dikirim oleh telepon seluler A diterima oleh
telepon seluler B maka akan dikirim laporan oleh SMSC yang menyatakan bahwa
pesan tersebut telah diterima oleh telepon seluler B.
Telepon seluler B langsung dihubungkan pada mikrokontroler. Tegangan
yang digunakan pada telepon seluler dan mikrokontroler adalah 5 volt, sehingga
tidak diperlukan lagi pengkonversi tegangan. Transfer data antara telepon seluler
dan mikrokontroler menggunakan komunikasi serial. Komunikasi serial tersebut
menggunakan standar komunikasi serial UART yang terdapat pada
mikrokontroler.
Mikrokontroler menerjemahkan isi pesan SMS dan memproses isi pesan
tersebut. Setelah pesan SMS diterjemahkan dan diproses maka mikrokontroler
driver motor DC. Hasil putaran motor DC akan dideteksi oleh rangkaian sensor
yang menggunakan tiga buah optocoupler. Selanjutnya hasil dari deteksi
rangkaian sensor akan dihitung oleh mikrokontroler dan mikrokontroler akan
mengirimkan hasil pantauannya ke telepon seluler pengirim. Jadi pengendali jarak
jauh ini bersifat open loop dengan pengembangan berupa pengiriman hasil
pantauan.
3.2 Perancangan Perangkat Keras
3.2.1 Mikrokontroler AVR AT90S2313
Mikrokontroler yang digunakan pada perancangan ini adalah AVR
AT90S2313. Mikrokontroler AVR AT90S2313 ini berfungsi untuk mengatur arah
dan kecepatan putar dari motor DC yang selanjutnya digerakkan oleh driver
motor. Selain itu mikrokontroler ini juga berfungsi untuk mendeteksi arah putar
dan menghitung kecepatan dari motor DC yang telah dideteksi terlebih dahulu
oleh sensor. Dalam perancangan perangkat keras ini akan dirancang reset
eksternal dan osilator yang mendukung kinerja mikrokontroler ini.
a.Reset Eksternal
Reset terjadi apabila pin reset mendapat logika 0 selama lebih dari
50ns. Pin reset dihubungkan dengan resistor (R1) yang terhubung ke VCC
dan kapasitor (C1) yang terhubung ke ground. Rangkaian reset eksternal
Gambar 3.2. Rangkaian reset eksternal.
Pada perancangan ini digunakan waktu 1ms untuk mereset
mikrokontroler. Penentuan reset eksternal dapat dilakukan dengan mengatur
nilai resistor dan kapasitornya. Untuk membuat keadaan reset tegangan
maksimal yang harus diberikan pada pin ini Vc = 0,85 Vcc (datasheet AVR
AT90S2313). Karena (1 RC)
t e Vcc Vc − −
= maka dapat dicari nilai C1 dengan :
)
1
(
RC te
Vcc
Vc
−−
=
Vcc e Vcc RC t 85 , 0 ) 1 ( − ≤ −; t = 1ms
85 , 0 ) 1 ( 1 ≤ − −RC
ms e 1 85 , 0 1 − ≤ − − RC ms e 15 , 0 1 − ≤ − − RC ms e 15 , 0 ln 1 ≤ − RC ms RC
ms ≤ ×
15 , 0 ln
1ms
RC ≤−
3
10 5271 ,
0 × −
=
RC
Ditentukan resistor yang digunakan 10kΩ, maka kapasitornya dapat
dicari dengan:
3
10 5271 ,
0 × −
= RC 3 10 5271 , 0
10kΩ×C = × −
Ω × = − k C 10 10 5271 , 0 3 9 10 7114 ,
52 × −
=
C
Jadi kapasitor minimum yang dapat digunakan adalah .
Pada perancangan ini digunakan kapasitor 56 nF.
9
10 7114 ,
52 × −
b. Osilator
Salah satu kelebihan mikrokontroler AVR AT90S2313 adalah
kecepatannya dalam melakukan eksekusi program. AVR AT90S2313
membutuhkan waktu satu siklus clock untuk melakukan eksekusi terhadap
suatu instruksi.
Pada perancangan ini digunakan kristal osilator 4 MHz sebagai clock
input dengan dua kapasitor C2 dan C3 sebesar 22pF (datasheet AVR
Hardware Design Consideration). Rangkaian osilator yang digunakan pada
Gambar 3.3. Osilator kristal yang dihubung ke mikrokontroler AT90S2313.
3.2.2Driver Motor DC
Perancangan ini menggunakan IC (Integrated Circuit) L293D sebagai driver
motor DC. Agar motor DC dapat bergerak maka pin enable harus dalam keadaan
logika tinggi. Jika diberikan logika rendah pada input 1A dan logika tinggi pada
input 2A maka motor DC akan bergerak searah jarum jam (CW). Sebaliknya jika
input 1A diberi logika tinggi dan input 2A diberi logika rendah maka motor DC
akan bergerak berlawanan arah jarum jam (CCW). Gambar kontrol motor DC dua
Motor DC tidak akan bergerak atau diam jika pin enable berada pada logika rendah. Selain itu motor DC juga akan diam jika input 1A dan 2A
mempunyai logika yang sama walaupun pin enable berada pada logika tinggi.
Beragam keadaan pada driver motor DC ditunjukan dalam tabel 3.1.
Tabel 3.1 Tabel keadaan driver motor.
3.2.3 Karakteristik Motor DC
Motor DC yang digunakan adalah tipe Mabuchi EG-530AD-2B. Motor tipe
ini memiliki tegangan maksimum 12 volt. Motor DC ini akan diatur kecepatannya
oleh mikrokontroler dengan teknik PWM. Untuk dapat mengatur kecepatannya
maka harus diketahui dahulu karakteristik dari motor DC ini.
Untuk dapat mengetahui karakteristik motor DC maka diperlukan rangkaian
PWM dan kontrol motor DC dua arah. Rangkaian PWM terdiri dari sebuah
op-amp yang memiliki input gelombang segitiga dan tegangan referensi yang
berubah-ubah. Rangkaian PWM ini berfungsi menghasilkan gelombang kotak
terdiri dari sebuah IC L293 dan rangkaian transistor sebagai saklar. Rangkaian
PWM dan kontrol motor DC dua arah ini dapat dilihat pada gambar 3.5.
Duty cycle minimum yang diperlukan motor DC untuk bergerak dari keadaan diam adalah sebesar 3,25%. Sedangkan tegangan pada motor DC terus
meningkat seiring meningkatnya kecepatan putar motor DC. Data selengkapnya
tentang karakteristik motor DC ini dapat dilihat pada tabel 3.2.
U2 L293D 2 7 10 15 1 9 3 6 11 14 1A 2A 3A 4A 1,2EN 3,4EN 1Y 2Y 3Y 4Y Gelombang Segitiga
VCC 12 v olt
VEE -12v olt
5 v olt
R2 1K R1 10K + -LM741 3 2 6 7 1 4 5 Q1 9014 MOTOR DC 1 2 Tegangan DC Vref
5 v olt
Gambar 3.5. Rangkaian PWM dan kontrol motor DC dua arah.
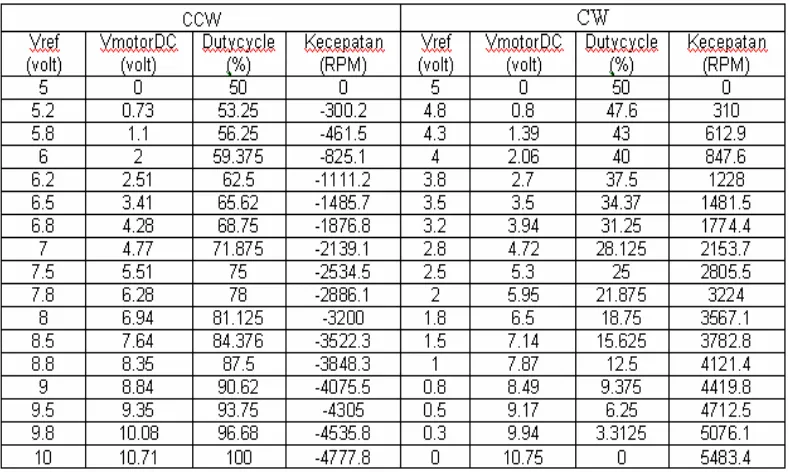
Mikrokontroler mengatur kecepatan dengan merubah duty cycle. Besarnya
duty cycle dan kecepatan putar per menit (RPM) baik untuk arah CW yang bernilai positif maupun CCW yang bernilai negatif selengkapnya dapat dilihat
Tabel 3.2. Hubungan antara duty cycle(%), tegangan motor DC dan kecepatan putar motor DC (RPM)
Saat duty cycle 0% motor DC berputar maksimum pada arah CW dan saat
duty cycle 100% motor DC berputar maksimum pada arah CCW. Sedangkan duty cycle 50% adalah duty cycle saat motor DC diam.
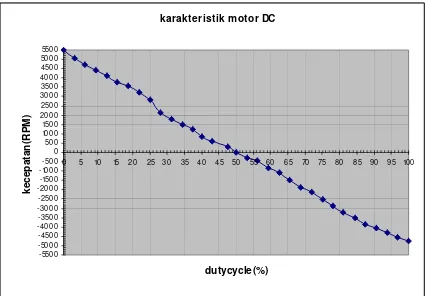
Grafik hubungan antara duty cycle (%) dan kecepatan putar per menit
(RPM) ditunjukan pada gambar 3.6. Tanda negatif pada sumbu kecepatan (RPM)
menandakan arah putar CCW. Berdasarkan grafik pada gambar 3.5 dapat dicari
persamaan garisnya antara titik-titik yang berhubungan. Mulai dari duty cycle 0% sampai 100% dibedakan menjadi 32 persamaan garis agar kecepatan putar yang
karakteristik m otor DC -5500 -5000 -4500 -4000 -3500 -3000 -2500 -2000 -1500 -1000 -500 0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
dutycycle(%) k ece p a ta n (R P M)
Gambar 3.6. Grafik hubungan duty cycle (%) dan kecepatan putar motor DC (RPM).
Untuk mencari persamaan garis diantara dua titik dapat dicari dengan
menggunakan persamaan 2.5 dan 2.7. Sebagai contoh diambil untuk duty cycle
40% sampai 43%. Kecepatan putar motor DC pada duty cycle 40% adalah 847,6
RPM dan pada duty cycle 43% adalah 612,9 RPM.
c x m y = . +
Dengan memasukan nilai xdan dan ymaka c dapat dicari:
c
+ −
= 78,2333.43 3 , 612 0331 , 3364 3 , 612 + = c 3331 , 3976 = c 3331 , 3976 . 2333 , 78 + − = x y 2333 , 78 3331 , 3976 2333 , 78 1 − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × − = y x 8266 , 50 . 01278 , 0 + − = y x
Persamaan garis berdasarkan rentang duty cycle dan rentang kecepatan
(RPM) ditunjukan pada tabel 3.3. Tanda negatif yang terdapat pada kolom rentang
kecepatan (RPM) menandakan arah CCW. Variabel x menunjukan duty cycle
yang dicari sedangkan variabel y menunjukan kecepatan putar per menit (RPM)
yang diketahui.
Tabel 3.3. Tabel hubungan rentang duty cycle(%), rentang kecepatan (RPM) dan persamaan garis.
Rentang Duty Cycle (%)
Rentang Kecepatan (RPM)
Persamaan Garis
0 sampai 3.3125 5483.4 sampai 5076.1 x=-0.00813+44.5955
3.3125 sampai 6.25 5076.1 sampai 4712.5 x=-0.00808.y+44.322
6.25 sampai 9.375 4712.5 sampai 4419.8 x=-0.01068.y+56.5628
9.375 sampai 12.5 4419.8 sampai 4121.4 x=-0.01047.y+55.6614
12.5 sampai 15.625 4121.4 sampai 3782.8 x=-0.00923.y+50.5371
15.625 sampai 18.75 3782.8 sampai 3567.1 x=-0.01449.y+70.4291
18.75 sampai 21.875 3567.1 sampai 3224 x=-0.00911.y+51.2396
21.875 sampai 25 3224 sampai 2805.5 x=-0.00747.y+45.9491
Rentang Duty Cycle (%)
Rentang Kecepatan (RPM)
Persamaan Garis
28.125 sampai 31.25 2153.7 sampai 1774.4 x=-0.00824.y+45.869
31.25 sampai 34.37 1774.4 sampai 1481.5 x=-0.01065.y+50.1511
34.37 sampai 37.5 1481.5 sampai 1228 x=-0.01235.y+52.6623
37.5 sampai 40 1228 sampai 847.6 x=-0.00657.y+45.5705
40 sampai 43 847.6 sampai 612.9 x=-0.01278.y+50.8343
43 sampai 47.6 612.9 sampai 310 x=-0.01519.y+52.3078
47.6 sampai 50 310 sampai 0 x=-0.00774.y+50
50 sampai 53.25 0 sampai -300.2 x=-0.01083.y+50
53.25 sampai 56.25 -300.2 sampai -461.5 x=-0.0186.y+47.6666
56.25 sampai 59.375 -461.5 sampai -825.1 x=-0.00859.y+52.2836
59.375 sampai 62.5 -825.1 sampai -1111.2 x=-0.01092.y+50.3626
62.5 sampai 65.62 -1111.2 sampai -1485.7 x=-0.00833.y+53.2425
65.62 sampai 68.75 -1485.7 sampai -1876.8 x=-0.008.y+53.7298
68.75 sampai 71.875 -1876.8 sampai -2139.1 x=-0.01191.y+46.3901
71.875 sampai 75 -2139.1 sampai -2534.5 x=-0.0079.y+54.9689
75 sampai 78 -2534.5 sampai -2886.1 x=-0.00853.y+53.3746
78 sampai 81.125 -2886.1 sampai -3200 x=-0.00996.y+49.2677
81.125 sampai 84.376 -3200 sampai -3522.3 x=-0.01009.y+48.847
84.376 sampai 87.5 -3522.3 sampai -3848.3 x=-0.00958.y+50.6224
87.5 sampai 90.62 -3848.3 sampai -4075.5 x=-0.01373.y+34.6536
90.62 sampai 93.75 -4075.5 sampai -4305 x=-0.01364.y+35.0369
93.75 sampai 96.68 -4305 sampai -4535.8 x=-0.01269.y+39.0981
96.68 sampai 100 -4535.8 sampai -4777.8 x=-0.01372.y+34.4533
Ditetapkan nilai minimum yang dapat diatur sebesar 400 RPM meningkat
100 RPM sampai maksimum 4000 RPM. Ketetapan ini didasarkan karena motor
DC baru dapat bergerak dari keadaan diam pada arah CW sebesar 310 RPM.
Sehingga ditetapkan nilai minimum 400 RPM. Untuk menghentikan putaran
motor kecepatannya 0 RPM. Dengan memasukan nilai kecepatan ke persamaan
Tabel 3.4. Hubungan kecepatan (RPM) dengan duty cycle (%) pada arah CW dan CCW.
Kecepatan putar (RPM) Duty cycle pada arah
CCW (%)
Duty cycle pada arah CW (%)
0 50 50
400 55.1 46.2
500 56.5 44.7
600 57.4 43.1
700 58.2 41.8
800 59.1 40.6
900 60.1 39.6
1000 61.2 38.9
1100 62.3 38.3
1200 63.2 37.6
1300 64.0 36.6
1400 64.9 35.3
1500 65.7 34.1
1600 66.5 33.1
1700 67.3 32 1800 68.1 31
1900 69.0 30.2
2000 70.2 29.3
2100 71.4 28.5
2200 72.3 27.9
2300 73.1 27.4
2400 73.9 26.94
2500 74.7 26.98
2600 75.5 25.9
2700 76.4 25.5
2800 77.2 25
2900 78.1 24.2
3000 79.1 23.5
3100 80.1 22.8
3200 81.1 22
3300 82.1 21.1
3400 83.1 20.2
3500 84.1 19.3
3600 85.1 18.2
3700 86 16.8
3800 87 15.4
3900 88.2 14.5
3.2.4Rangkaian Sensor
Rangkaian sensor dalam perancangan ini terdiri dari tiga buah optocoupler
dan piringan bercelah. Optocoupler terdiri dari LED infra merah sebagai pemberi
masukan dan phototransistor sebagai penerimanya Ilustrasi rangkaian sensor
menggunakan tiga buah optocoupler dan piringan bercelah ditunjukan pada
gambar 3.7.
Gambar 3.7. Rangkaian Sensor dengan motor DC, piringan bercelah dan tiga buah optocoupler.
Tiga buah optocoupler tersebut memiliki dua fungsi yang berbeda. Dua
fungsi tersebut adalah:
a. Sensor Arah Putar
Sensor arah putar menggunakan tiga buah optocoupler. Seperti yang
ditunjukan pada gambar 3.7 optocoupler yang digunakan sebagai sensor
Optocoupler nomor satu berguna untuk mendeteksi arah putar CW.
Optocoupler nomor dua untuk mendeteksi arah putar CCW. Sedangkan
optocoupler nomor tiga sebagai sensor awal agar optocoupler nomor satu dan nomor dua bisa aktif. Cara kerjanya adalah kode hitam pada piringan
bercelah berputar melewati optocoupler nomor tiga. Jika optocoupler nomor
tiga berubah keadaan maka optocoupler nomor satu dan nomor dua bisa
mulai mendeteksi arah putarnya. Jika kode hitam melewati optocoupler
nomor satu terlebih dahulu dibanding optocoupler nomor dua maka arah
putarnya dideteksi sebagai CW. Sebaliknya jika kode hitam tersebut terlebih
dahulu melewati optocoupler nomor dua dibanding optocoupler nomor satu
maka arah putarnya dideteksi sebagai CCW.
Piringan bercelah terbuat dari bahan akrilik. Piringan ini terlebih
dahulu ditempelkan pada motor DC dan diletakan diantara celah
optocoupler. Piringan ini memiliki ukuran diameter 8 cm. Piringan tersebut telah diberi dua keadaan yaitu terang dan gelap. Keadaan terang dan gelap
inilah yang akan mengaktifkan dan menonaktifkan optocoupler sehingga
mikrokontroler mampu mendeteksi arah putarnya.
Pada saat keadaan terang (tidak terhalang tanda hitam) maka sinar
infra merah dari LED dapat dipancarkan ke phototransistor. Hal ini
membuat phototransistor mendapat suplai arus pada basis dan membuat
phototransistor aktif. Keluarannya akan berada pada logika rendah ”0”.
Pada saat keadaan gelap (terhalang tanda hitam) maka LED infra
phototransistor tidak mendapat suplai arus ke basis yang mengakibatkan
phototransistor tidak aktif. Keluarannya akan berada pada logika tinggi ”1”
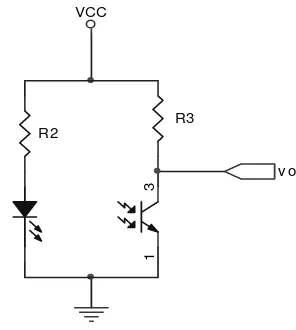
Gambar rangkaian sensor arah putar menggunakan optocoupler ditunjukan
pada gambar 3.8.
R2
VCC
v o
1
3
R3
Gambar 3.8. Rangkaian sensor putaran motor menggunakan optocoupler.
Arus maju maksimum dioda infra merah If = 60mA dan tegangan maju
dioda infra merah Vf = 1,7 volt (data sheet optocoupler H21A1). Pada
perancangan ini digunakan arus maju dioda infra merah If = 10mA. Apabila
Vcc diberikan sebesar 5 volt maka dapat dihitung besarnya R2 berdasar
persamaan 2.1:
If Vf Vcc
R2= −
mA V V R
10 7 , 1 5
2= −
Ω =330 2
Saat LED infra merah menyuplai cahaya dan phototransistor
menerimanya, maka akan menghasilkan arus Ib. Adanya arus Ib ini
menyebabkan tegangan antara kolektor dan emiter kecil (VCE ≈ 0). Agar
keluaran phototransistor dapat maksimal maka phototransistor dibuat dalam
keadaan saturasi. Tegangan VCE pada keadaan saturasi adalah 0,4 volt. Arus
pada kolektor IC = 1,8 mA. Besar Hambatan R3 dapat dicari dengan
persamaan 2.4:
C CE CC
I V V
R3= −
mA v v
R
8 , 1
4 , 0 5
3= −
Ω =2555,55 3
R
Nilai resistor R3 yang digunakan dalam perancangan adalah sebesar 2,7 KΩ.
b. Sensor Kecepatan
Rangkaian sensor kecepatan berguna untuk mendeteksi kecepatan
putaran motor DC. Sensor kecepatan ini menggunakan optocoupler nomor
tiga. Jadi optocoupler nomor tiga mempunyai dua fungsi sekaligus yaitu
sebagai sensor kecepatan dan juga sebagai sensor awal agar optocoupler
lainnya dapat mendeteksi arah putar. Perhitungan kecepatan motor ini
dilakukan oleh mikrokontroler dengan menghitung banyaknya pulsa dalam
satuan waktu tertentu.
spesifikasi dan jenis optocoupler yang digunakan pada ketiga sensor ini juga sama. Yang membedakan hanyalah fungsi dari optocoupler tersebut.
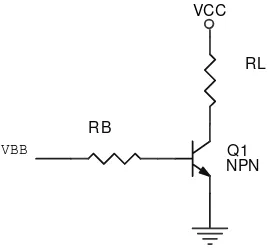
3.2.5Rangkaian Inverter Menggunakan Transistor
Rangkaian inverter digunakan untuk membalik keluaran dari
mikrokontroler agar driver motor memiliki dua input yaitu high dan low. Dua keadaan inilah yang dimanfaatkan oleh driver motor untuk mengatur arah putar
dari motor DC.
Untuk membuat rangkaian inverter menggunakan transistor maka
tegangan pada kolektor-emitter dikondisikan pada keadaan saturasi dan cut off.
Rangkaian inverter menggunakan transistor ditunjukan pada gambar 3.9.
RB
VCC
VBB
RL
Q1 NPN
Gambar 3.9. Rangkaian inverter menggunakan transistor.
Untuk dapat membuat transistor dalam keadaan saturasi maka tegangan
pada kolektor–emiter (VCE) ditentukan sebesar 0,3 volt. Hambatan RL ditentukan
sebesar 10KΩ. Maka arus pada kolektor saat saturasi dapat ditentukan
dengan persamaan 2-6:
) (Sat
RL V Vcc
Ic(Sat) = − CE(sat) Ampere
Ω − = k volt volt IcSat 1 3 , 0 5 )
( Ampere
7 , 4
) (Sat =
Ic mA.
Dengan arus 4,7mA transistor sudah mencapai keadaan saturasi. Dengan
demikian arus pada basis yang meyebabkan keadaan saturasi Ib(Sat) dapat
dihitung dengan menggunakan persamaan 2-7.
hfe Ic Ib(Sat) = (Sat)
Dengan hfe = 11
hfe mA IbSat 7 , 4 ) ( = 11 7 , 4 ) ( mA IbSat =
00043 , 0
) (Sat =
Ib Ampere
Untuk mencari besarnya RB dapat dicari menggunakan persamaan 2-8.
B BE BB R V V Ib= −
B
R volt volt
mA 5 0,7
43 ,
Sumber masukan VBB dari mikrokontroler adalah sebesar 5 volt. Sedangkan
Besarnya tegangan basis-emiter pada transistor 9014 adalah 0,7. Dengan
demikian besarnya nilai RB dapat dicari dengan:
mA volt volt
RB
43 , 0
7 , 0
5 −
=
Ω =10.000 B
R
Resistor RB yang digunakan adalah 10kΩ.
3.3Perancangan Perangkat Lunak 3.3.1Inisialisasi Periferal
Inisialisasi pertama yang harus dilakukan adalah inisialisasi jenis
mikrokontroler. Mikrokontroler AVR AT90S2313 menggunakan file def2313.inc
untuk dapat menggunakan semua data book yang ada dalam mikrokontroler
tersebut dan device AT90S2313 untuk menunjukan jenis mikr
![Tabel 2.1 Fungsi Alternatif Port B [3].](https://thumb-ap.123doks.com/thumbv2/123dok/1514965.2040614/32.595.171.505.498.750/tabel-fungsi-alternatif-port-b.webp)
![Tabel 2.2. Fungsi alternatif Port D [3].](https://thumb-ap.123doks.com/thumbv2/123dok/1514965.2040614/33.595.172.477.465.747/tabel-fungsi-alternatif-port-d.webp)
![Gambar 2.6. Gaya tarik dan gaya tolak magnet berhenti [4].](https://thumb-ap.123doks.com/thumbv2/123dok/1514965.2040614/37.595.247.400.229.343/gambar-gaya-tarik-dan-gaya-tolak-magnet-berhenti.webp)