LAPORAN PRAKTIKUM SISTEM OTOMASI
DISUSUN OLEH : KELOMPOK III
Abdul Hamdi Alfarezi ( 1970031086 ) Ahmeda Aveseana ( 1970031071 ) Reydo Meivan Daffa (1970031096 ) Ibnu Muhammad Kahfi ( 1970031072 ) Kurniawan Budi Cahyono ( 1970031074 ) Anugrah Ramadhan ( 1970031089 )
LABORATURIUM SISTEM OTOMASI
PROGRAM STUDI TEKNIK INDUSTRI
MODUL 1 PLC
SISTEM OTOMASI
LABORATURIUM SISTEM OTOMASI
PROGRAM STUDI TEKNIK INDUSTRI UNIVERSITAS KRISNADWIPAYANA
JAKARTA
2021
LEMBAR PENGESAHAN
LAPORAN PRAKTIKUM SISTEM OTOMASI
Laporan ini disusun sebagai salah satu syarat kelulusan Praktikum Sistem Otomasi Program studi Teknik Industri Fakultas Teknik Universitas Krisnadwipayana
Kelompok : III(Tiga) (DITERIMA / DITOLAK)
Nama :
1. Abdul Hamdi Alfarezi ( 1970031086 ) 2. Ahmeda Aveseana ( 1970031071 ) 3. Reydo Meivan Daffa ( 1970031096 ) 4. Ibnu Muhammad Kahfi ( 1970031072 ) 5. Kurniawan Budi Cahyono ( 1970031074 ) 6. Anugrah Ramadhan ( 1970031089 )
Jakarta, 17 Desember 2021
Menyetujui, Mengetahui,
Kepala Lab. Teknik Industri Asisten Laboraturium
Ir.Aries Abbas. ST.,MM.,MT.,IPM.,AER.,Cand.Ph.D. Ainul Rizqi NIDN. 03290565505 NIM. 1970031023
ii
KATA PENGANTAR
Alhamdulillah, puji syukur kehadirat Allah SWT yang telah memberikan rahmat dan inayah-Nya sehingga kami dapat menyelesaikan Laporan Praktikum Sistem Otomasi Terima kasih saya ucapkan kepada Asisten Laboratorium yang telah membantu kami baik secara moral maupun materi. Terima kasih juga saya ucapkan kepada teman-teman seperjuangan yang telah mendukung kami sehingga kami bisa menyelesaikan tugas ini tepat waktu. Kami menyadari, bahwa Laporan Praktikum Sistem Otomasi yang kami buat ini masih jauh dari kata sempurna baik segi penyusunan, bahasa, maupun penulisannya. Oleh karena itu, kami sangat mengharapkan kritik dan saran yang membangun dari semua pembaca guna menjadi acuan agar penulis bisa menjadi lebih baik lagi di masa mendatang.Semoga Laporan Praktikum Sistem Otomasi ini bisa menambah wawasan para pembaca dan bisa bermanfaat untuk perkembangan dan peningkatan ilmu pengetahuan.
Jakarta, 17 Desember 2021
Penulis Kelompok 3
Daftar Isi
Daftar Isi ... iii
BAB I ... 1
PENDAHULUAN ... 1
1.1. Latar Belakang Masalah ... 1
1.2. Rumusan Masalah ... 1
1.3. Maksud dan Tujuan Percobaan... 2
1.4. Peralatan yang digunakan ... 2
1.5. Sistematika Penulisan ... 2
BAB II LANDASAN TEORI ... 4
2.1. Programmable Logic Controller ... 4
2.2. Fungsi PLC ... 5
2.3. Kelebihan PLC ... 6
2.4 Human Machine Interface ... 6
2.5. Memori ... 7
2.7. Tinjauan umum perangkat keras ...... 8
2.8.Tinjauan umum perangkat lunak ... 9
2.9. Unit Input/Output (I/O) ... 9
2.10. Komponen Dasar PLC ... 10
2.11. Konsep PLC ... 11
2.12. Jenis-jenis PLC ... 12
2.13. Tahap Pemograman PLC ... 12
BAB III ... 14
PENGOLAHAN DATA ... 14
3.1. Pembuatan program baru pada CX Programmer. ... 14
BAB IV ... 21
ANALISA DAN TUGAS ... 21
4.1 Analisa dari pembuatan Program CX Programmer ... 21
4.2. TUGAS ... 22
BAB V ... 24
KESLIMPULAN DAN SARAN ... 24
iv
DAFTAR PUSTAKA ... 25
1
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Kemajuan ilmu pengetahuan dan teknologi yang berkembang cepat, menyebabkan makin banyaknya sistem otomasi yang digunakan dalam industri. Salah satu bentuk otomasi tersebut adalah penggunaan PLC (Programmable Logic Controller) dalam mengontrol suatu proses kerja dari suatu sistem. Dalam sistem otomasi pencampuran cairan berwarna ini dikontrol dengan menggunakan PLC. Dewasa ini PLC tidak hanya menggantikan pengendali relay yang ada sebelumnya, tetapi banyak mengambil alih fungsi kontrol tambahan seperti pencacahan, penghitungan, perbandingan dan memproses dari sinyal analog.
Perangkat keras PLC dapat ditemui dalam berbagai ukuran dari skala kecil yang disebut mikro sampai skala besar yang dibuat modular.
Seperti halnya komputer, PLC hanyalah perangkat keras yang tidak bisa berfungsi apa-apa dan tidak bisa mengerjakan suatu tugas otomasi yang kompleks dan rumit untuk suatu proses produksi tanpa adanya program.
Program ini yang memberikan instruksi-instruksi dan urutannya kepada mikrokomputer untuk melakukan pembacaan informasi dari sensor dan menggerakan aktuator. Bagian I/O dari PLC terdiri dari modul input dan modul output. Sistem I/O membentuk interface dengan peranti medan yang dihubungkan pada pengontrol.
1.2. Rumusan Masalah
2
3. Para Peserta Praktikum mampu memahami komponen-komponen utama yang terdapat di Trainer Kit.
1.3. Maksud dan Tujuan Percobaan Maksud Praktikum
Adapun maksud dari praktikum ini yaitu diharapkan agar peserta dapat mengenal dan mengetahui cara membuat Programan pada PLC serta memahami cara menggunakan software CX-Programmer.
Tujuan Praktikum
Tujuan diadakannya praktikum ini adalah agar peserta mampu:
1. Mempelajari cara memprogram PLC dengan diagram Ladder.
2. Memprogram PLC dengan Ladder untuk mengaktifkan button pada PLC, menjalankan konveyor dan sensor.
1.4. Peralatan yang digunakan 1. Trainer Kit
2. Conveyer 3. Laptop
4. Software CX-Programmer
1.5. Sistematika Penulisan BAB I : PENDAHULUAN
Berisi tentang Latar Belakang Masalah, Rumusan Masalah, Maksud dan Tujuan Percobaan, Peralatan yang digunakan, Sistematika Penulisan.
BAB II : LANDASAN TEORI
Landasan Teori berisikan teori-teori yang mendukung penelitian. Landasan Teori ini diambil dari sejumlah buku dan jurnal-jurnal referensi yang mendukung dan berhubungan dengan pokok permasalahan yaitu PLC (Programmable Logic Controller).
BAB III : PENGOLAHAN DATA
Bab ini berisi tentang urutan proses pengerjaan pengolahan data pada PLC (Programmable Logic Controller) yang sudah diprogramkan pada software CX-Programmer.
BAB IV : TUGAS
Sebutkan dan jelaskan penerapan PLC pada dunia Industri.
BAB V : KESIMPULAN DAN SARAN
Bagian ini merupakan ringkasan dari analisis data dan pembahasan yang sesuai dengan tujuan penelitian. Bab ini juga memberikan saran-saran yang sifatnya membangun agar penelitian yang dilakukan dimasa mendatang menjadi lebih baik.
4
BAB II
LANDASAN TEORI
2.1. Programmable Logic Controller
Sebuah PLC (Programmable Logic Controller) adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relay yang ada pada sistem kontrol konvensional. PLC bekerja dengan cara mengamati masukan (melalui sensor),kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, berupa menghidupkan atau mematikan keluaran. Program yang digunakan adalah berupa Ladder Diagram yang kemudian harus dijalankan oleh PLC. Dengan kata lain PLC menentukan aksi apa yang harus dilakukan pada instrument keluaran yang berkaitan dengan status suatu ukuran atau besaran yang diamati. Proses yang dikontrol ini dapat berupa regulasi variabel secara kontinyu seperti pada sistem - sistem servo, atau hanya melibatkan kontrol dua keadaan (on/off) saja, tetapi dilakukan secara berulang-ulang seperti umum dijumpai pada mesin pengeboran, sistem konveyor dan lain sebagainya. PLC secara bahasa berarti pengontrol logika yang dapat diprogram, tetapi pada kenyataannya, PLC secara fungsional tidak lagi terbatas pada fungsi-fungsi logika saja.
Sebuah PLC dewasa ini juga dapat melakukan perhitungan-perhitungan aritmatika yang relatif kompleks, fungsi komunikasi, dokumentasi dan lain sebagainya. PLC banyak digunakan pada aplikasi-aplikasi industri, misalnya pada proses pengepakan, perakitan otomatis dan lain-lain. Hampir semua aplikasi kontrol listrik membutuhkan PLC. Alasan utama perancangan PLC adalah untuk menghilangkan beban ongkos perawatan dan penggantian sistem kontrol mesin berbasis relay. Adapun ciri atau karateristik PLC memiliki beberapa aspek sebagai berikut :
a) PLC sebenarnya suatu sistem berbasis mikroprosesor yang memiliki fungsi–fungsi dan fasilitas utama dari sebuah mikrokomputer.
b) PLC diprogram melalui programming unit yang bisa berupa terminal komputer dengan VDU (Video Display Unit) dan keyboard atau dengan
terminal portabel khusus (mirip kalkulator dengan tampilan LCD).
Pada saat ini PLC dapat di program melalui PC.
c) PLC mengontrol suatu alat berdasarkan status masukan/keluaran suatu alat dan program.
Sehingga pengertian PLC yang awalnya berfungsi menggantikan peran relay, dapat diartikan sesuai kata penyusunnya adalah sebagai berikut:
a) Programmable yaitu menunjukkan kemampuannya yang dapat dengan mudah diubah-ubah sesuai program yang dibuat dan kemampuannya dalam hal memori program yang telah dibuat.
b) Logic yaitu menunjukkan kemampuannya dalam memproses input secara aritmatik dengan melakukan proses membandingkan, menjumlahkan, mengkalikan, membagi, dan mengurangi.
c) Controller yaitu menunjukkan kemampuannya dalam mengontrol dan mengatur proses sehingga menghasilkan output yang diinginkan.
2.2. Fungsi PLC
PLC ini dirancang untuk menggantikan satu rangkaian relay sequensial dalam suatu sistem kontrol. Selain dapat diprogram, alat ini juga dapat dikendalikan, dan dioperasikan oleh orang yang tidak memiliki pengetahuan di bidang pengoperasian komputer secara khusus. PLC ini memiliki bahasa pemrograman yang mudah dipahami dan dapat dioperasikan bila program yang telah dibuat dengan menggunakan software yang sesuai dengan jenis PLC yang digunakan sudah dimasukkan. Alat ini bekerja berdasarkan input-input yang ada dan tergantung dari keadaan pada suatu waktu tertentu yang kemudian akan meng-on atau meng-off kan output-output. PLC juga dapat diterapkan untuk pengendalian sistem yang memiliki output banyak. Banyak hal yang dapat dilakukan oleh PLC, yaitu sebagai:
Squence Control
a) Pengganti relay Logic Controller b) Timers/Counters
c) Pengganti Pengendali yang berupa papan rangkaian elektronik
6 2.3. Kelebihan PLC
Sistem kontrol menggunakan PLC mempunyai banyak keuntungan dibandingkan sistem kontrol menggunakan peralatan kontrol yang dirangkai secara listrik seperti relay atau kontaktor yaitu :
a) PLC didesain untuk bekerja dengan kehandalan yang tinggi dan jangka waktu pemakaian yang lama pada lingkungan industri.
b) Jika sebuah aplikasi kontrol yang kompleks dan menggunakan banyak relay, maka akan lebih murah apabila kita menggunakan/memasang satu buah PLC sebagai alat kontrol.
c) PLC dapat dengan mudah diubah-ubah dari satu aplikasi ke aplikasi lain dengan cara memprogram ulang sesuai yang kita inginkan.
d) PLC dapat melakukan diagnosa dan menunjukkan kesalahan apabila terjadi gangguan sehingga ini sangat membantu dalam melakukan pelacakan gangguan.
e) PLC juga dapat berkomunikasi dengan PLC lain termasuk juga dengan komputer. Sehingga kontrol dapat ditampilkan di layar komputer, didokumentasikan, serta gambar dapat dicetak dengan menggunakan printer.
f) Mudah dalam melakukan pelacakan gangguan kontrol.
PLC mempunyai kemampuan menggantikan logika dan pengerjaan sedikit kontrol relay yang merupakan instalasi langsung. Rangkaian kontrol cukup dibuat secara software. Pengkabelan hanya diperlukan untuk menghubungkan peralatan input dan output. Hal ini mempermudah dalam mendesain dan memodifikasi rangkaian, karena cukup dengan mengubah program PLC.
2.4 Human Machine Interface
HMI menghubungkan PLC ke operator. HMI dapat mengirim perintah dari operator untuk PLC, dan kemudian PLC mengeksekusi perintah. Seri XC PLC mendukung beragam merek HMI; koneksi
didasarkan pada protokol komunikasi. Umumnya berkomunikasi melalui protokol Modbus, pengaturan parameter rinci tergantung pada HMI. The Xinje HMI dapat bekerja dengan PLC secara langsung (parameter komunikasi diatur sesuai sudah). Saat Xinje HMI memiliki TG, TH,TP, OP, MP.
2.5. Memori
Memori PLC terdiri dari memori sistem operasi dan sistem data.
Memori sistem operasi adalah memori tempat menyimpan program yang mengendalikan operasi PLC. Memori data adalah memori untuk lokasi penempatan program yang dibuat berfungsi sebagai buffer sementara atas kondisi input/ouput dan status fungsi-fungsi internal PLC. Ada beberapa macam tipe memori yang digunakan dalam PLC antara lain:
a) Random Acces Memory (RAM)
Random Acces Memory (RAM) adalah memori internal CPU, dimana isinya dapat dimodifikasi dengan cepat dan secara berulang-ulang. RAM sering juga disebut real-writememory karena data secara konstan dapat ditulis ke dalam memori atau dapat dibaca dari memori.
b) Read Only Memory (ROM)
Informasi yang ada didalam Read Only Memory (ROM) hanya dapat dibaca saja. Informasi atau program dimasukkan kedalam ROM oleh pabrik pembuat untuk keperluan operasi PLC antara lain untuk keperluan CPU dan untuk keperluan pemrograman PLC.
1. Real Time System
Real-time (waktu nyata) adalah Suatu sistem yang menggunakan prinsip waktu nyata dalam menyampaikan atau membagikan suatu informasi, sehingga informasi yang ditampilkan pada sisi pengirim sesuai dengan dengan informasi yang diterima pada sisi penerima dalam hal waktu maupun keadaan. Jadi sistem kontrol yang memiliki waktu respon yang cukup cepat sehingga mampu merespon masukan dalam periode waktu yang terbatas sesuai setpoint yang ditentukan, maka sistem kontrol tersebut dapat disebut sebagai sistem kontrol real-time. Untuk alat kontrol otomasi industri
8
ini akan sangat berpengaruh karena akan menunjang di dunia industri yang sangat memerlukan keahlian dibidang kontrol. Banyak kelebihan penggunaan alat kontrol ini dibandingkan dengan sistem kontrol proses konvensional, diantaranya jumlah kabel yang dibutuhkan bisa berkurang, mengkonsumsi daya yang lebih rendah, bisa dengan cepat mendeteksi kesalahan, dan sparepart yang dibutuhkan tidak banyak, tetapi kelemahan sistem kontrol juga ada yaitu kesulitan saat dilakukan penggantian, kesulitan dalam pelacakan kesalahan.
2.7.Tinjauan umum perangkat keras 1) PLC Omron CP1E N30
Programmable Logic Controller (PLC) pada dasarnya merupakan sebuah computer khusus yang dirancang untuk mengontrol suatu proses atau mesin. Proses yang dikontrol dapat berupa sebuah sistem control ON/OFF yang dilakukan secara berulang kali dan dapat juga berupa regulasi variabel secara kontinyu seperti pada sistem-sistem servo secara umum pada mesin pengeboran, sistem konveyor, dan lain sebagainya.
PLC Omron meruapakan salah satu jenis PLC yang bertipe compact. Ciri- ciri PLC jenis ini adalah :
a) Seluruh komponen (power supply, CPU, modul input- output, modul komunikasi) menjadi satu kesatuan yang saling terhubung.
b) Umumnya berukuran kecil (compact)
c) Mempunyai jumlah input/ouput relatif sedikit dan tidak dapat diekspan
d) Tidak dapat ditambah modul-modul khusus.
Gambar 1. PLC Omron CP1E
2.8.Tinjauan umum perangkat lunak 2) CX-Programmer
CX-Programmer Omron merupakan sebuah software komputer yang digunakan dalam bidang pemrograman PLC yang berfungsi untuk membuat, memonitor dan merubah dari berbagai program PLC Omron.
CX-Programmer dapat dijalankan dengan standar minimal komputer prosessor 486 MHz dengan sebuah sistem operasi Windows XP. Gambar berikut ini adalah tampilan dari CX Programmer Ver 9.3.
Gambar 2. Tampilan muka software CX-Programmer
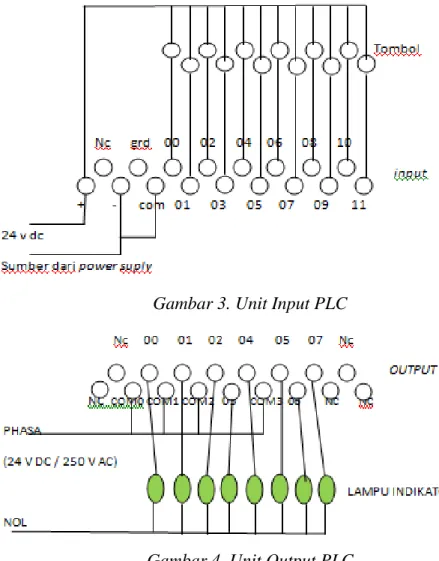
2.9. Unit Input/Output (I/O)
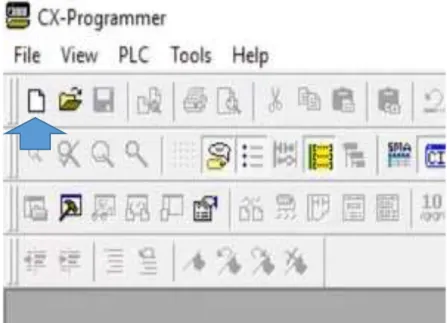
Unit input/output merupakan sistem mikro elektronika. Unit input PLC terdiri dari unit yang mampu mempresentasikan dua level sinyal 0 dan 1 (input level logika) atau mempresentasikan sejumlah level sinyal secara linier (level sinyal analog). Unit output yang umumnya digunakan untuk menggerakkan actuator berfungsi sebagai saklar on/off (output level logika) atau sebagai penggerak yang level output nya dapat diatur dalam jangkauan (range) dan langkah (step) tertentu (output level analog). Modul input akan
10
mengirimkan parameter dan statusnya ke memori untuk dapat diproses oleh CPU sesuai dengan parameter operasi program, hasilnya akan dikirimkan kembali ke memori untuk mengupdate status output sesuai dengan parameter atau status yang diperoleh dari CPU. Jumlah input/output yang diidentifikasikan pada suatu PLC umumnya bukan merupakan jumlah unit input/output yang terpasang, tetapi jumlah unit input/output maksimum yang dapat ditangani oleh CPU. Unit input/output umumnya dirancang modular agar penggunanya dapat disesuaikan dengan kebutuhan sistem kendali.
Gambar 3. Unit Input PLC
Gambar 4. Unit Output PLC
2.10. Komponen Dasar PLC
1) Unit Processor atau Central Processing Unit (CPU) yang di dalamnya berisi mikroprosesor yang mampu menginterpretasikan sinyal-sinyal masukan dan melakukan tindakan-tindakan pengontrolan, sesuai dengan
program yang tersimpan di dalam memori, lalu mengkomunikasikan keputusan-keputusan yang diambilnya sebagai sinyal-sinyal kontrol ke antarmuka keluaran.
2) Unit satu daya yang diperlukan untuk mengubah tegangan arus bolak- balik (ac) dari sumber menjadi tegangan arus searah (dc) yang dibutuhkan oleh prosesor dan rangkaian-rangkaian di dalam modul- modul antar muka masukan dan keluaran.
3) Unit memori merupakan tempat menyimpan program yang akan digunakan untuk melaksanakan tindakan-tindakan pengontrolan yang disimpan mikroprosesor.
Bagian masukan dan keluaran merupakan antarmuka dimana prosesor menerima informasi dari dan mengkomunikasikan informasi kontrol ke perangkat-perangkat diluar. Sinyal-sinyal masukan dapat berasal dari saklar- saklar, sensor-sensor, dan sebagainya. Sinyal-sinyal keluaran bisa diberikan pada alat pengasut motor, katup, lampu, dan sebagainya.
2.11. Konsep PLC
4) Programmable, menunjukkan kemampuan dalam hal memori untuk menyimpan program yang telah dibuat yang dengan mudah diubah- ubah fungsi atau kegunaannya.
5) Logic, menunjukkan kemampuan dalam memproses input secara aritmatik dan logic (ALU), yakni melakukan operasi membandingkan, menjumlahkan, mengalikan, membagi, mengurangi, negasi, and, or, dan lain sebagainya.
6) Controller, menunjukkan kemampuan dalam mengontrol dan mengatur proses sehingga menghasilkan output yang diinginkan.
12 2.12. Jenis-jenis PLC
Pada masa sekarang PLC dibagi menjadi beberapa tipe berdasarkan bentuk dan kemampuannya. Berikut beberapa tipe PLC berdasarkan ukuran dan kemampuannya :
1) Tipe Compact
PLC ini memiliki beberapa ciri :
a. Seluruh komponen, power supply, CPU, modul input, modul
output, modul komunikasi menjadi satu.
b. Umumnya berukuran kecil (compact).
c. Mempunyai jumlah input dan output yang relatif sedikit dan tidak dapat diekspansi.
d. Tidak ditambah modul-modul khusus.
2) Tipe Modular
PLC ini memiliki beberapa ciri : a. Komponennya terpisah dari modul.
b. Berukuran besar.
c. Memungkinkan ekspansi yang banyak.
d. Memungkinkan penambahan modul-modul khusus.
2.13. Tahap Pemograman PLC
Tahapan dalam merancang atau mengubah suatu sistem program kendali dibutuhkannya pendekatan-pendekatan sistematis dengan prosedur prosedur sebagai berikut :
Dalam tahapan ini si perancang harus menentukan terlebih dahulu sistem apa yang akan dikendalikan dan proses bagaimana yang akan ditempuh. Sistem yang dikendalikan dapat berupa peralatan mesin ataupun proses yang terintegrasi yang sering secara umum disebut dengan controlled system.
1) Penentuan I/O
Pada tahap ini semua piranti masukan dan keluaran eksternal yang akan dihubungkan PLC harus ditentukan. Piranti masukan dapat berupa saklar, sensor, valve dan lain-lain sedangkan piranti keluaran dapat berupa solenoid katup elektromagnetik dan lain- lain.
2) Perancangan Program (Program Design)
Setelah ditentukan input dan output maka dilanjutkan dengan proses merancang program dalam bentuk ladder diagram dengan mengikuti aturan dan urutan operasi sistem kendali.
3) Pemrograman (Programming)
Untuk membuat pemrograman dengan cara memasukan ladder diagram sesuai dengan rangkaian sistem kendali.
4) Menjalankan Sistem (Run The System)
Pada tahapan ini perlu dideteksi adanya kesalahan-kesalahan satu persatu (debug), dan menguji secara cermat sampai kita memastikan bahwa sistem aman untuk dijalankan. PLC yang digunakan pada perencangan alat ini adalah jenis PLC Omron.
14
BAB III
PENGOLAHAN DATA
3.1. Pembuatan program baru pada CX Programmer.
CX-Programmer adalah software aplikasi yang dikembangkan oleh Omron untuk memprogram semua jenis PLC produk Omron. Modul ini hanya membahas pemrograman menggunakan CX-Programmer versi 9.1. aplikasi berbasis Windows. Oleh karena itu mengaktifkannya mirip dengan software berbasis Windows lainnya. Beberapa pilihan cara mengaktifkannya adalah sebagai berikut :
1) Membuka terlebih dahulu di menu desktop pada windows lalu klik software CX-Programmer.
Tampilan awal dari software CX-Programmer seperti ini :
Gambar 3.1.1. Tampilan awal CX-Programmer
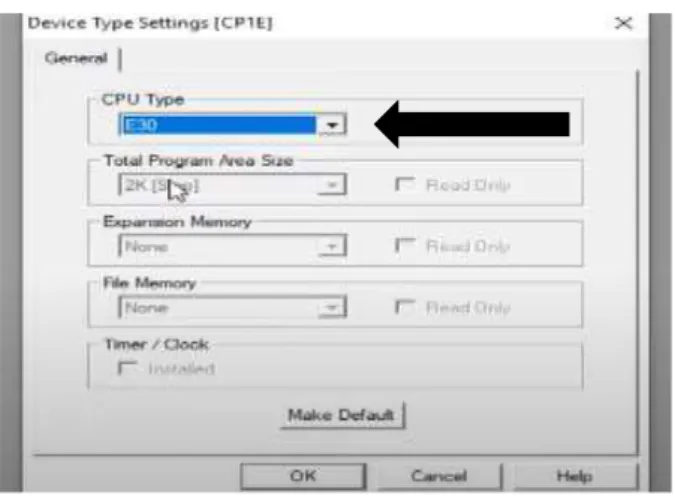
2) Membuat Projek Baru
Klik New dengan melihat gambar di bawah ini :
Gambar 3.1.2 Tools lembaran baru
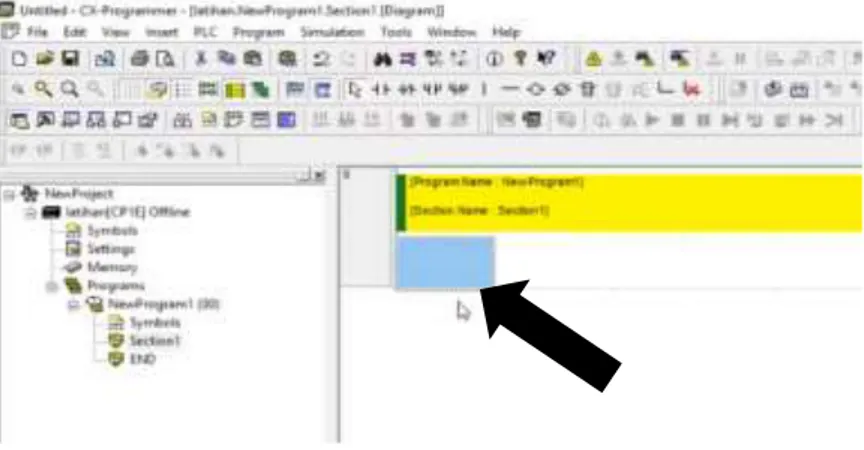
Gambar 3.1.3 Menentukan Device Type
Pilih tipe PLC yang di pakai dengan menyesuaikan yang terpasang pada trainer yaitu CP1E. Lalu klik Setting.
16
Gambar 3.1.4 Device Type Settings
Klik CPU Type lalu pilih NA dengan melihat di bagian PLC Omron Klik Ok.
Untuk tampilannya seperti gambar dibawah ini :
Gambar 3.1.5 Pembuatan Program Name
3) Membuat Program
Untuk selanjutnya pembuatan rangkaian program dengan mengunakan 1 kontak NO dengan mengklik kotak berwarna biru.
Gambar 3.1.6 Memasukkan Tools kelembar program
Dengan mengklik logo kontak NO dan geser ke bagian kotak berwarna biru seperti pada gambar di bawah ini :
Gambar 3.1.7 Tools New Contact
Setelah muncul kotak Dialog New Contact => ketikkan address 0.07, klik OK Dan ketik di bagian edit comment dengan “tombol ijo”
Gambar 3.1.8 Mengedit Comment Membuat tombol STOP:
Ketik / <= membuat kontak NC.
Ketik addres 001, Klik ok.
18
Gambar 3.1.9 Pembuatan Normally Close dan Open
Membuat garis Line :
Klik tekan logo garis Line lalu geser ke bagian kotak biru dan lepas.
SEBELUM
SESUDAH
Gambar 3.1.10 Program Line
Untuk memasukan Tools output cara memasukannya serupa dengan mengklik tekan logo di bawah gambar ini lalu geser ke bagian kotak biru dan lepas logo outputnya.
Gambar 3.1.11 Normally Coil Output
Dan di bagian New Coil ketikan 100.07 dan edit comment nya dengan buzzer.
Gambar 3.1.12 Setelah Memasukkan Tools Coil
Dan hasil akhinya seperti berikut ini :
Gambar 3.1.13 Hasil akhir dari program pembuatannya
20 Transfer program ke PLC:
Klik ikon Work Online, atau tekan tombol keyboard Ctrl + W.
Gambar 3.1.14 Transfer Program Ke PLC
Klik menu PLC.
Pilih Transfer.
Pilih To PLC tunggu beberapa saat, ikuti perintah yang muncul pada monitor.
21
BAB IV
ANALISA DAN TUGAS
4.1 Analisa dari pembuatan Program CX Programmer
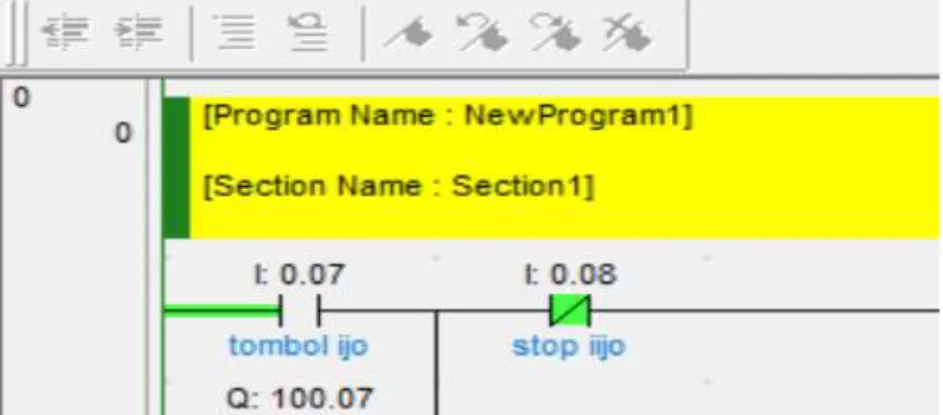
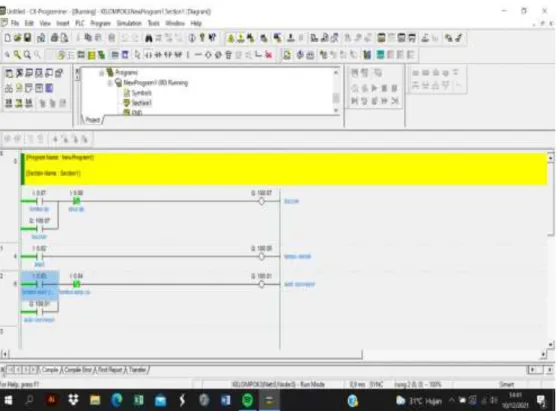
Gambar 4.1 Program CX Programmer Diagram Ladder
Ladder pertama
Input pertama Normally close yang di program pada tombol berwarna hijau 07 menjadi start menyalakan lampu buzzer, lalu di beri normali open pada tombol berwarna hijau 08 untuk tombol mematikan lampu buzzer, kemudian mengalir kepada output yaitu lampu buzzer pada kode Q: 100.07 dengan reaksi lampu akan menyala terus menerus sebelum dimatikan pada tombol berwarna hijau 08.
22 Ladder ketiga
Input pertama normally close yang diprogram pada tombol kuning 03 menjadi start menjalankan konveyor, lalu diberi normally open pada tombol berwarna kuning 04 untuk tombol mematikan konveyor, kemudian mengalir pada output yaitu konveyor pada kode Q: 100.01 dengan reaksi konveyor akan berjalan otomatis sebelum dimatikan pada tombol berwarna kuning 04.
4.2. TUGAS
1. Sebutkan dan Jelaskan penerapan PLC pada dunia industri
PLC memungkinkan industri untuk menciptakan sistem terpusat yang menjadi sumber semua kegiatan. Sistem terpusat (terintegrasi) memudahkan proses produksi, pengelolaan pekerjaan, pencarian data, serta audit. Sistem terpusat juga memudahkan dalam proses perbaikan jika terjadi kerusakan. PLC melakukan beragam tugas kontrol, mulai dari kontrol ON / OFF berulang-ulang dari mesin sederhana hingga manufaktur canggih dan kontrol proses.
Industri Otomotif
Monitoring Mesin Produksi: Sistem memonitor setiap peletakkan part/komponen, pendeteksian part yang cacat, penggerakan part untuk produksi, perhitungan waktu siklus peralatan, dan mengontrol tingkat presisi. Data statistik tersedia bagi operator untuk memudahkan analisa, serta mengontrol berjalannya produksi.
Pengujian Produksi Komponen: PLC memudahkan proses analisa dalam jalur perakitan produksi. Sistem secara signifikan mengurangi resiko human error dengan memberikan hasil yang lebih presisi serta pengukuran akurat. Misalnya dalam pengujian komponen Turbo pada mesin kendaraan modern, variabel yang dapat diukur dalam sistem meliputi jumlah tekanan dalam psi / bar, flow capacity, kecepatan putar, serta aliran bahan bakar dan volume udara dingin.
Industri Pulp & Paper
Pulp Batch Blending: PLC mengontrol operasional blending bahan pembuatan kertas secara berurutan, mulai dari proses pengukuran bahan, pelaksanaan metode blending melalui program yang sudah disetting, maupun penempatan hasil jadi pada suhu tertentu agar mengering. Sistem ini memungkinkan operator untuk mengontrol setiap proses dan bahan yang digunakan, dan memudahkan kalkulasi bahan, serta jumlah yang diproduksi.
Persiapan Batch untuk Pemrosesan Pembuatan Kertas: Penggunaan PLC disini termasuk kontrol dari sistem persiapan stok untuk pembuatan kertas. Resep untuk setiap tangki batch dipilih dan disesuaikan melalui entry operator.
PLC dapat mengontrol logic untuk penambahan bahan kimia berdasarkan pengukuran level tangki. Selain itu, PLC juga dapat memberikan laporan penggunaan serta proses keseluruhan produksi untuk selanjutnya dianalisis oleh operator maupun manajemen.
24
BAB V
KESLIMPULAN DAN SARAN
5.1. Kesimpulan
1. PLC merupakan salah satu alat kendali modern yang khusus dirancang untuk menangani sistem kendali otomatis baik dalam bidang industri maupun non industri.
2. Sistem kendali yang bekerja secara otomatis dapat membantu mempermudah manusia dalam melakukan aktifitasnya.
3. Dengan adanya alat bantu simulasi, maka pemahaman mengenai deskripsi kerja alat mudah dimengerti dan dipahami.
5.2. Saran
1. Di software pembuatan program di kembangkan lagi dengan tools- tools yang telah di sederhanakan lagi
2. Untuk kedepannya diharapkan dapat dikembangkan lebih jauh lagi untuk di bagian PLC, serta dapat diperbaiki dan disempurnakan lagi sistem kontrolnya.
DAFTAR PUSTAKA
[1] Rifqi Firmansyah, Farid Baskoro, Bagus Rio Rynaldo Jurusan Teknik Elektro, Universitas Negeri Surabaya (2009) : PLC real-time,
https://journal.unesa.ac.id/index.php/inajeee/article/download/3309/2010/0 (diakses Desember 2021)
[2] Ensiklopedi (2012):Real time System,
http://digilib.ittelkom.ac.id/index.php?option=com_
(diakses Desember 2021)
Muh Fikri S Nasir, M. Yunus Hi. Abbas, Idham A. Djufri , (Mei 2019) : Perancangan Simulator Programmable Logic Controller (PLC)
[3] https://scholar.google.com/scholar?hl=en&as_sdt=0%2C5&q=pROGRAM ER+LOGIC+CONTROLLER&btnG=
(diakses Desember 2021)
MODUL 2
SISTEM OTOMASI
LABORATURIUM SISTEM OTOMASI
PROGRAM STUDI TEKNIK INDUSTRI UNIVERSITAS KRISNADWIPAYANA
JAKARTA 2021
MODUL 2
MIKROCONTROLLER
LEMBAR PENGESAHAN
LAPORAN PRAKTIKUM SISTEM OTOMASI
Laporan ini disusun sebagai salah satu syarat kelulusan Praktikum Sistem Otomasi Program studi Teknik Industri Fakultas Teknik Universitas Krisnadwipayana
Kelompok : III(Tiga) (DITERIMA / DITOLAK)
Nama :
1. Abdul Hamdi Alfarezi ( 1970031086 ) 2. Ahmeda Aveseana ( 1970031071 ) 3. Reydo Meivan Daffa ( 1970031096 ) 4. Ibnu Muhammad Kahfi ( 1970031072 ) 5. Kurniawan Budi Cahyono ( 1970031074 ) 6. Anugrah Ramadhan ( 1970031089 )
Jakarta, 17 Desember 2021
Menyetujui, Mengetahui,
Kepala Lab. Teknik Industri Asisten Laboraturium
Ir.Aries Abbas. ST.,MM.,MT.,IPM.,AER.,Cand.Ph.D. Ainul Rizqi NIDN. 03290565505 NIM. 1970031023
ii
KATA PENGANTAR
Alhamdulillah, puji syukur kehadirat Allah SWT yang telah memberikan rahmat dan inayah-Nya sehingga kami dapat menyelesaikan Laporan Praktikum Sistem Otomasi Terima kasih saya ucapkan kepada Asisten Laboratorium yang telah membantu kami baik secara moral maupun materi. Terima kasih juga saya ucapkan kepada teman-teman seperjuangan yang telah mendukung kami sehingga kami bisa menyelesaikan tugas ini tepat waktu. Kami menyadari, bahwa Laporan Praktikum Sistem Otomasi yang kami buat ini masih jauh dari kata sempurna baik segi penyusunan, bahasa, maupun penulisannya. Oleh karena itu, kami sangat mengharapkan kritik dan saran yang membangun dari semua pembaca guna menjadi acuan agar penulis bisa menjadi lebih baik lagi di masa mendatang.Semoga Laporan Praktikum Sistem Otomasi ini bisa menambah wawasan para pembaca dan bisa bermanfaat untuk perkembangan dan peningkatan ilmu pengetahuan.
Jakarta, 17 Desember 2021
Penulis Kelompok 3
Daftar Isi
Daftar isi ... ...iii BAB I ... 1
1.2 Rumusan Masalah ... 2 1.3 Maksud Dan Tujuan Percobaan ... 2 1.4 Peralatan Yang Digunakan ... 2 1.5 Sistematika Penulisan ... 2 BAB II ... 4 2.1 Microcontroller ...... 4
2.1.1 Arduino Nano ... 5 2.1.2 Arduino Mega 2560 ... 6 2.1.3 Arduino Uno ... 8 2.1.4 Galileo ...... 16 2.1.5 Quasi-Zenith Satellite System (QZSS) ...... 16 2.1.6 Komposisi Jaringan ...... 18 2.1.7 Jenis-jenis Baterai ... 23 BAB III ... 25 PENGOLAHAN DATA ... 25 3.1 Pengenalan Software Arduino ... 25 3.2 Cara Membuat Program LED BLINK ... 25 3.3 Membuat Program Menghidupkan LED Dengan Tombol ... 30 3.4 Membuat Kontrol LED Dengan Potensiometer ... 35 BAB IV ... 40 TUGAS ... 40 BAB V ... 42 KESIMPULAN DAN SARAN ... 42 5.1 Kesimpulan ... 42 DAFTAR PUSTAKA ... 43
1
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Mikrokontroler, sebagai suatu terobosan teknologi mikroprosesor dan mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang yang kecil serta dapat diproduksi secara masal (dalam jumlah banyak) membuat harganya menjadi lebih murah (dibandingkan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu bahkan mainan yang lebih baik dan canggih.Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk suatu aplikasi tertentu saja (hanya satu program saja yang bisa disimpan). Perbedaan lainnya terletak pada perbandingan RAM dan ROM.
Pada sistem komputer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antar muka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada Mikrokontroler, perbandingan ROM dan RAM-nya yang besar, artinya program kontrol disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan. Mikrokontroler adalah sistem komputer yang dikemas dalam sebuah IC. IC tersebut mengandung semua komponen pembentuk
komputer seperti CPU, RAM, ROM, Port IO. Berbeda dengan PC yang dirancang untuk kegunaan umum (general purpose), mikrokontroler digunakan untuk tugas atau fungsi yang khusus (special purpose) yaitu mengontrol sistem tertentu.
1.2 Rumusan Masalah
Berdasarkan uraian latar belakang diatas, maka rumusan masalah dalam penelitian ini adalah sebaga berikut :
1. Bagaimana mengintegrasikan GPS dan Mikrokontroller Arduino?
2. Bagaimana cara memudahkan user dalam melakukan capturing koordinat dengan menggunakan GPS dan Mikrokontroller Arduino?
3. Bagaimana membandingkan waktu dan akurasi dari hasil peta wilayah yang dibuat antara pemetaan secara manual dan dengan GPS Mikrokontroller Arduino?
1.3 Maksud Dan Tujuan Percobaan
Adapun tujuan yang ingin dicapai dalam penyusunan penelitian ini adalah sebagai berikut :
1. Dapat membuat GPS Mapping yang terintegrasi dengan Mikrokontroller Arduino.
2. Membangun sistem capturing data koordinat yang real time dan akurat.
3. Memperoleh hasil pemetaan wilayah yang lebih akurat dan lebih cepat sehingga apabila terdapat kesalahan garis batas wilayah dipeta manual bisa segera diperbaiki.
1.4 Peralatan Yang Digunakan 1. Laptop
2. Software Mikrokontroller 3. Mikrokontroller
1.5 Sistematika Penulisan
Sistematika penulisan yang akan diuraikan dalam menyusun praktikum ini akan dijelaskan sebagai berikut :
Bab I : Pendahuluan
3
masalah, tujuan, metode penelitian dan sistematika pembahasan.
Bab II : Landasan Teori
Pada bab ini, dituliskan tentang teori-teori dasar yang mendukung dalam pembuatan “Pemetaan Wilayah Memanfaatkan GPS dan Mikrokontroler Arduino dengan Visualisasi Melalui Google Earth”.
Bab III : Pegolahan Data
Bab ini menjelaskan step by step dari Program LED Blink, Program Menghidupkan LED Dengan Tombol, dan Program Kontrol LED Dengan Potensiometer.
Bab IV : Tugas
1. Soal ini berisikan tentang contoh penerapan ARDUINO dibidang industri yang menghasilkan sebuat alat canggih di industri.
2. Soal ini menjelaskan macam – macam Arduino
Bab V : Kesimpulan Dan Saran
Bab ini berisikan kesimpulan dan saran. Kesimpulan berisi tentang ringkasan hasil implementasi dan pengujian. Sedangkan saran berisi tentang usulan-usulan terhadap penyelesaian lebih lanjut dari permasalah dikaji.
4
BAB II
LANDASAN TEORI
2.1 Microcontroller
Gambar 2.1 Arduino Nano (Arduino, 2019)
Microcontroller merupakan rangkaian terintegrasi terpadu yang didesain untuk mengatur operasi spesifik dalam sebuah sistem tertanam.
Biasanya microcontroller mencakup sebuah prosesor, memori, periferal input/output (I/O) dalam sebuah chip. (Rouse, M., 2012)
Microcontroller sudah mencakup seluruh komponen yang dapat membuatnya beroperasi sendiri, dan telah didesain pada khusunya untuk mengawasi dan/atau mengontrol tugas. Karena itu, microcontroller juga memiliki memori, berbagai pengendali antarmuka, satu atau lebih timer, pengendali interrupt, dan pin I/O kegunaan umum yang pengguna dapat mengganti 1 bit dalam suatu byte tanpa menyentuh bit-bit lainnya.
(Gridling, 2007)
Microcontroller bersifat terdedikasi untuk satu tugas dan bekerja dengan satu program spesifik. Program disimpan dalam ROM (read-only memory) dan pada umumnya tidak berubah. Microcontroller juga pada umumnya perangkat rendah daya, lebih rendah dari komputer atas meja (desktop).
5
komponen berbeda dalam perangkat. Chip microcontroller tipikal dapat memiliki 1000 byte ROM dan 20 byte RAM, dengan 8 pin I/O. Dalam jumlah yang lebih besar, biaya chip terkadang sangat murah. (Brain, M., n.d.)
2.1.1 Arduino Nano
Arduino Nano adalah board berbasis ATMEGA-328P yang kecil, lengkap, dan ramah breadboard. Arduino Nano dapat diberi daya via koneksi USB Mini-B, suplai daya eksternal tidak teregulasi 6-20V (pin 30), atau suplai daya eksternal teregulasi 5V. Sumber daya dipilih ke sumber tegangan tertinggi secara otomatis.
ATMEGA-328 memiliki memori 32 KB (dengan 2 KB digunakan untuk bootloader). ATMEGA-328 memiliki 2 KB SRAM dan 1 KB EEPROM. Seluruh 14 pin digital Arduino Nano dapat digunakan sebagai masukan atau keluaran, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(), yang semuanya beroperasi pada 5 V. Setiap pin dapat memberi atau menerima maksimum 40 mA dan memiliki resistor pull-up internal 20-50 kOhm (tidak terhubung pada awalnya). Sebagai tambahan, beberapa pin memiliki fungsi khusus, seperti berikut:
Serial: 0 (RX) dan 1 (RX) digunakan untuk menerima (RX) dan mengirim (TX) data serial TTL. Pin-pin ini dihubungkan kepada pin yang bersangkutan pada chip serial FTDI USB-ke-TTL.
Interrupt Eksternal: 2 dan 3. Pin-pin ini dapat dikonfigurasi untuk menjalankan sebuah fungsi interrupt pada nilai low, rising edge atau falling edge, atau ada perubahan nilai dengan fungsi attachInterrupt
PWM (Pulse Width Modulation): 3, 5, 6, 9, 10, dan 11. Menyediakan keluaran PWM 8-bit dengan fungsi analogWrite().
Reset: Untuk menyalakan ulang microcontroller. Pin disetel ke nilai low untuk mengaktifkan fungsi reset.
Arduino Nano memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan komunikasi serial UART TTL (5V), yang tersedia pada pin
digital 0 (RX) dan 1 (TX). FTDI FT232RL pada board saluran komunikasi serial ini melalui USB dan driver FTDI (termasuk dalam perangkat lunak Arduino) menyediakan port virtual untuk perangkat lunak pada komputer.
Perangkat lunak Arduino termasuk serial monitor yang memungkinkan data tekstual sederhana untuk dikirim ke dan dari papan Arduino. LED indikator RX dan TX pada board akan berkedip ketika data sedang dikirim melalui chip FTDI dan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah library bernama
"SoftwareSerial" memungkinkan komunikasi serial pada salah satu pin digital dari Arduino Nano. ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. (Arduino, 2019)
2.1.2 Arduino Mega 2560
Arduino MEGA 2560 adalah sebuah mikrokontroler yang menggunakan ATMEGA2560. Fitur-fitur yang dimilikinya adalah memiliki 54 pin input/output termasuk juga diantaranya ada 15 pin yang dapat digunakan sebagai PWM output, 16 pin input analog, 4 UART (serial port hardware), 16 MHz kristal osilator, USB port, input power jack, header ICSP dan tombol reset. Untuk dapat beroperasi, cukup dengan menggunakan koneksi USB atau dapat juga menggunakan adapter AC-to-DC atau baterai.
Gambar 2.2 Arduino Mega 2560
7
Berikut adalah ringkasan spesifikasi yang dimiliki oleh papan arduino MEGA 2560 ini:
Tabel 2.1 Tabel spesifikasi yang dimiliki papan Arduino MEGA 2560
Nam a
Deskrips i Mikrokontroler Atmega2560 Tegangan Operasi 5V
Tegangan Masukan (disarankan)
7-12V
Tegangan (batas) 6-20V
Pin I/O Digital 54 (yang 14 memberikan keluaran PWM)
Pin input analog 16 Arus DC per I/O Pin 40 mA Arus DC untuk Pin
3.3V
50 mA
Flash Memory 256 KB dimana 8 KB digunakan oleh bootloader SRAM 8 KB EEPROM 4 KB
Kecepatan Clock 16 MHz
2.1.3 Arduino Uno
Uno Arduino adalah board berbasis mikrokontroler pada ATmega328. Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC-DC atau baterai untuk menggunakannya
Board Arduino Uno memiliki fitur-fitur baru sebagai berikut :
- 1,0 pinout: tambah SDA dan SCL pin yang dekat ke pin aref dan dua pin baru lainnya ditempatkan dekat ke pin RESET, dengan IO REF yang memungkinkan sebagai buffer untuk beradaptasi dengan tegangan yang disediakan dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan Prosesor yang menggunakan AVR, yang beroperasi dengan 5V dan dengan Arduino Karena yang beroperasi dengan 3.3V. Yang kedua adalah pin tidak terhubung, yang disediakan untuk tujuan pengembangannya.
- Circuit Reset
Gambar 2.3 Board Arduino Uno
9
Gambar 2.4 Kabel USB Board Arduino Uno
Deskripsi Arduio UNO:
Tabel 2.2 Deskripsi Arduino Uno
Mikrokontroller Atmega328
Operasi Voltage 5V
Input Voltage 7-12 V (Rekomendasi) Input Voltage 6-20 V (limits)
I/O 14 pin (6 pin untuk PWM)
Arus 50 mA
Flash Memory 32KB
Bootloader SRAM 2 KB
EEPROM 1 KB
Kecepatan 16 Mhz
a. Sensor Pencari Jarak
Sensor pencari jarak adalah perangkat yang mengukur jarak dari pengamat ke target yang dituju. Sensor pencari jarak telah diaplikasikan ke berbagai bidang, seperti teknik, pengamatan tanah, dan pemetaan sektor dimana jarak yang sangat presisi dibutuhkan untuk menghindari kesalahan perencanaan atau pelanggaran hukum. Pencari jarak juga semakin banyak ditemukan pada kendaraan dimana pencari jarak otomatis bekerja sebagai sistem pencegah tabrakan. Teknologi ini juga sudah memasuki dunia drone
dimana mereka digunakan untuk membantu menghindari halangan dan memperhalus pendaratan. (Patton, 2018)
i. Sensor Pencari Jarak Ultrasonik
Gambar 2.5 Sensor Pencari Jarak Ultrasonik HC-SR04 (Dallos, 2017)
Sensor pencari jarak ultrasonik bekerja untuk menemukan objek dengan satu bagian sensor bekerja sebagai pemancar gelombang suara, dan satunya lagi bekerja sebagai mikrofon yang menghitung berapa lama waktu yang dibutuhkan gelombang suara untuk kembali. Semakin lama waktunya, maka semakin jauh objek dari sensor. Sensor tidak dapat mendeteksi objek secara individu, dan hanya dapat memberikan informasi mengenai seberapa lama suara yang dikirim untuk kembali lagi. Apabila objek meresap suara, atau tidak ada objek dalam jarak deteksi, ada kemungkinan bahwa tidak cukup suara yang diterima kembali untuk menghitung jarak (©ArcBotics, 2016). Sensor ultrasonik adalah sensor yang serbaguna dalam penghitungan jarak, dan menyediakan solusi yang paling murah. Sensor ultrasonik juga cukup cepat untuk aplikasi umum. Dalam sistem yang lebih sederhana, versi harga rendah dari microcontroller 8-bit dapat juga digunakan pada sistem untuk mengurangi harga. (Shrivastava, 2010)
11 ii. Sensor Jarak Laser
Gambar 2.6 Laser Rangefinder Sensor V1 (5Hz/40M) (Tindie, n.d.)
Sensor pencari jarak laser adalah sensor pencari jarak yang menggunakan sinar laser untuk menentukan jarak dari pengamat ke sebuah objek. Sinar laser akan memantul dari objek dan akan kembali ke receiver, dimana pencari jarak akan menghitung waktu dari sinar dikirim sampai diterima kembali dengan clock kecepatan tinggi. Semenjak kecepatan sinar dapat diketahui (sebesar kecepatan cahaya), sistem dapat menggunakan ukuran waktu dengan mudah untuk menghitung jarak (Zant, 2013). Sinyal cahaya juga merambat dengan kelajuan konstan yang membolehkan frekuensi penghitungan yang lebih tinggi. Inframerah lebih dipilih karena dapat memastikan disturbansi yang lebih sedikit dan dapat dibedakan dari cahaya ambien alami dengan mudah (Ruffo, 2014).
b. Ultrasonik
Ultrasonik adalah getaran berfrekuensi lebih besar dari batas atas jarak frekuensi yang bisa didengar manusia, yaitu lebih besar dari 20 kHz.
Istilah sonic digunakan untuk gelombang ultrasonik beramplitudo sangat tinggi. Pada frekuensi-frekuensi tinggi tersebut sangat sulit untuk sebuah gelombang suara untuk berpropagasi secara efisien, karena molekul materi dimana gelombang merambat tidak dapat membawa getaran dengan cukup cepat. Kecepatan propagasi dari gelombang ultrasonik sangat bergantung pada kekentalan dari medium. Hal ini dapat menjadi alat yang berguna untuk memeriksa kekentalan bahan. (Berg, n.d.)
i. Penghitungan Jarak Dan Navigasi
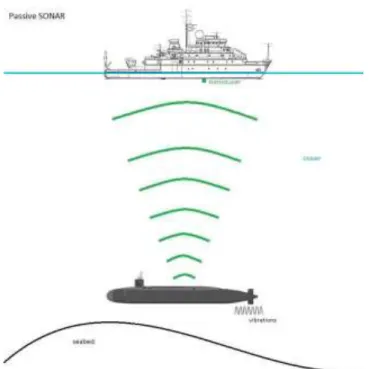
Gambar 2.7 Kerja SONAR pasif mendeteksi objek. (The Mariners' Museum Park, n.d.)
SONAR memiliki aplikasi di bidang kelautan yang ekstensif. Dengan mengirim sinyal suara atau ultrasonik dengan menghitung waktu yang dibutuhkan untuk memantul dari objek yang jauh dan kembali ke sumber, lokasi dari objek tersebut dapat diketahui dan gerakannya dapat dilacak.
Teknik ini digunakan secara ekstensif untuk melacak kapal selam dan ranjau laut. Salah satu keunggulan gelombang ultrasonik dari gelombang suara dalam air adalah frekuensi tinggi yang memungkinkan ultrasonik untuk menjelajah dengan jarak yang lebih jauh dan dengan lebih sedikit difraksi. (Berg, n.d.)
c. Global Navigation Satellite System (GNSS)
Global Navigation Satellite System (GNSS) adalah sebuah gugus yang terdiri dari banyak satelit yang menyediakan sinyal dari luar angkasa,
13
Sesuai dengan definisi, GNSS menyediakan cakupan global. Contoh dari GNSS adalah Galileo dari Uni Eropa, Global Positioning System (GPS) dari Amerika Serikat, Globalnaya navigatsionnaya sputnikovaya sistema (GLONASS) dari Rusia, dan BeiDou dari China. (What is GNSS?, 2017)
i. Global Positioning System (GPS)
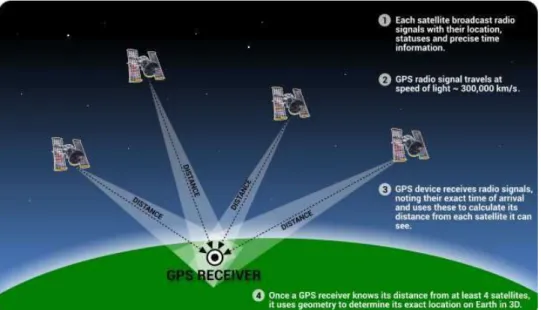
Gambar 2.8 Ilustrasi kerja GPS (© Geneko, n.d.)
Global Positioning Systems (GPS) adalah alat navigasi dan penempatan presisi. Kegunaan GPS sekarang telah merambah dunia komersial dan saintifik. Secara komersial GPS digunakan sebagai alat navigasi dan penempatan di pesawat, kapal, mobil dan untuk hampir seluruh aktivitas luar ruangan. Dalam komunitas saintifik, GPS memainkan peran penting dalam prediksi dan studi cuaca dan iklim, dan juga pembelajaran dan men-survey pergerakan tektonik selama dan di antara gempa dengan akurat.
Ada tiga bagian yang berbeda yang membentuk GPS. Segmen sistem pertama terdiri dari 24 satelit, mengorbit 20,000 kilometer diatas bumi dalam orbit melingkar 12 jam. Untuk mengitari bumi sekali dibutuhkan 12 jam bagi setiap satelit. Untuk memastikan mereka dapat terdeteksi dari manapun di atas permukaan bumi, satelit-satelit tersebut dibagi menjadi 6 kelompok, dimana masing-masing kelompok terdiri dari 4 satelit. Kelompok-kelompok tersebut membentuk 6 planar orbital yang
mengelilingi bumi secara menyeluruh. Satelit- satelit tersebut mengirim sinyal radio ke bumi yang berisi informasi mengenai satelit. Menggunakan receiver GPS berbasis tanah, sinyal tersbut dapat dideteksi dan digunakan untuk menentukan posisi receiver (lintang, bujur, dan ketinggian). Sinyal radio dikirim pada dua frekuensi L-band (frekuensi di antara 390 hingga 1550 MHz) yang berbeda, dan dalam setiap sinyal, rangkaian kode dikirim.
Dengan membandingkan rangkaian kode yang diterima dan kode yang asli, ilmuwan dapat menentukan berapa lama sinyal mencapai bumi dari satelit.
Lama delay sinyal berguna untuk mempelajari lapisan-lapisan atmosferik bumi, yaitu Ionosfer dan Troposfer. Sinyal ketiga yang berisi data mengenai posisi dan kondisi satelit juga dikirimkan.
Bagian kedua dari sistem GPS adalah stasiun tanah, terdiri dari receiver dan antena, juga alat-alat komunikasi untuk mengirim data ke pusat data. Antena dapat menghadap ke arah manapun untuk menerima sinyal satelit dan mengirimnya ke receiver sebagai arus listrik. Receiver memisah sinyal menjadi saluran-saluran dan frekuensi-drekuensi yang berbeda khusus untuk satelit tertentu dan frekuensi pada waktu tertentu. Begitu sinyal telah diisolasi receiver dapat memecahkan mereka dan memisahkan mereka menjadi frekuensi individu. Dengan informasi ini receiver menghasilkan posisi umum (lintang, bujur, dan ketinggian) untuk antena.
Bagian ketiga dari sistem GPS adalah pusat data. Peran pusat data adalah mengawasi dan mengendalikan stasiun-stasiun GPS global, dan menggunakan sistem komputer terautomatisasi untuk mengambil dan menganalisa data dari receiver stasiun. Begitu diproses, data dengan data asli yang mentah, tersedia untuk banyak kegunaan lain untuk ilmuwan- ilmuwan. (Glasscoe, 1998)
ii. Globalnya Navigatsionnya Sputnikovaya System (GLONASS)
Globalnaya navigatsionnaya sputnikovaya sistema (GLONASS)
15
sebanding. GLONASS dikembangkan oleh Rusia, setelah sebelumnya dimulai oleh Uni Soviet pada tahun 1976. GLONASS memiliki jaringan yang terdiri dari 24 satelit yang mencakup bumi.
Saat digunakan sendiri GLONASS tidak memiliki cakupan sekuat GPS, namun saat keduanya digunakan bersamaan, akurasi dan cakupan akan meningkat. GLONASS juga lebih berguna di lintang utara seperti Rusia, karena GLONASS pada awalnya diciptakan untuk Rusia (sebelumnya Uni Soviet).
Akurasi merupakan keuntungan dari GLONASS dengan akurasi sampai 2 meter. GPS dan GLONASS membuat perangkat pengguna ditemukan dan dilokasikan oleh 55 satelit di seluruh bumi. Bila perangkat berada di tempat dimana sinyal GPS terkendala di antara bangunan besar atau kereta bawah tanah, perangkat akan dilacak oleh satelit GLONASS secara akurat. (Bisht, 2016)
iii. BeiDou
BeiDou Satellite Navigation System (BDS) adalah sistem navigasi satelit yang telah dibangun dan dioperasikan secara independen oleh Republik Rakyat Tiongkok sebagai infrastruktur antariksa yang menyediakan layanan waktu, posisi, dan navigasi dengan akurasi tinggi untuk pengguna global.
BDS utamanya terdiri dari tiga bagian: luar angkasa, darat, dan pengguna. Bagian luar angkasa adalah gugus satelit hibrida yang terdiri dari satelit GEO, IGSO dan MEO. Bagian darat terdiri dari dari berbagai macam stasiun darat, termasuk stasiun kontrol utama, stasiun sinkronisasi waktu dan uplink, dan juga stasiun pengawasan. Bagian pengguna terdiri dari berbagai macam produk dasar seperti chip, modul, antena, terminal, sistem aplikasi, dan layanan aplikasi, yang dapat kompatibel dengan sistem lainnya.
BDS memiliki karakteristik seperti lebih banyak satelit di orbit tinggi untuk menawarkan kapabilitasi anti-shielding yang lebih baik, yang
pada khususnya dapat diamati di daerah lintang rendah. BDS juga menyediakan sinyal navigasi dengan beberapa frekuensi, dan dapat menambah akurasi layanan dengan menggunakan gabungan sinyal multi- frekuensi. Terakhir, BDS mengintegrasikan kapabilitas navigasi dan komunikasi untuk pertama kalinya, dan memiliki lima fungsi utama, yaitu navigasi real-time, pelacakan cepat, waktu presisi, layanan pelaporan posisi dan layan komunikasi pesan singkat. (BeiDou Navigation Satellite System, n.d.)
2.1.4 Galileo
Galileo adalah GNSS milik Eropa, menyediakan informasi posisi dan waktu dengan implikasi positif yang besar untuk layanan dan pengguna di Eropa. Galileo memberikan posisi pengguna dengan presisi yang lebih tepat dari sistem-sitem lain yang tersedia.
Bagian luar angkasa Galileo, begitu diluncurkan sepenuhnya, akan mencakup gugus satelit MEO sebanyak 30 buah. Bagian darat terdiri dari dua Pusat Kontrol Galileo yang didukung oleh Ground Control Station (GCS) dan Ground Mission Segment (GMS), dimana GCS menangani kendaraan luar angkasa dan perawatan gugus satelit, dan GMS menentukan data navigasi dan waktu. (European GNSS Service Centre, n.d.)
2.1.5 Quasi-Zenith Satellite System (QZSS)
Quasi-Zenith Satellite System (QZSS) adalah sistem satelit yang digunakan di daerah Asia-Oseania, dengan fokus pada Jepang. Idealnya adalah untuk memiliki satelit yang tetap berdiri di langit di atas Jepang.
Meski begitu, satelit tidak dapat dibuat untuk menetap karena adanya gaya sentrifugal dari berbagai arah dan tarikan gravitasi bumi.
Satelit Geostasioner dibuat untuk tetap berdiri di langit diatas garis ekuator pada lintang tertentu sehingga satelit dapat terlihat kapanpun dari permukaan bumi. Saat satelit berosilasi dari utara ke selatan, mereka berada pada orbit geostasioner terinklinasi, yaitu sebuah orbit utara-selatan simetris yang berbentuk seperti angka delapan. Dari satelit-satelit yang berada pada
17
lebih lamban pada belahan bumi utara dengan cara bergerak menjauhi bumi, dan lebih cepat pada belahan bumi selatan dengan cara begerak mendekati bumi. Untuk alasan itu, QZO dari QZSS mengorbit dengan bentuk seperti angka delapan dengan asimetri utara-selatan. Satelit menghabiskan waktu kira-kira 13 jam di belahan bumi utara dan 11 jam di belahan bumi selatan, sehingga satelit dapat berada dekat Jepang untuk waktu yang lama. (Quasi- Zenith Satellite Orbit, n.d.)
d. Global System for Mobile communication (GSM)
Gambar 2.9 Modem GSM SIM900A. (Pantech Solutions, n.d.)
Global System for Mobile communication (GSM) adalah jaringan mobile digital yang digunakan secara luas oleh pengguna telepon selular di Eropa dan bagian-bagian dunia lainnya. GSM menggunakan sebuah variasi dari time- division multiple access (TDMA) dan merupakan yang paling banyak digunakan dari tiga teknologi telepon nirkabel, yaitu: TDMA, GSM, dan code-division multiple access (CDMA). GSM mendigitisasikan dan mengkompres data, lalu mengirimnya melalui sebuah saluran dengan dua aliran data pengguna yang lain, setiap saluran pada slot waktu sendiri. GSM beroperasi pada pita frekuensi 900 MHz atau 1,800 MHz. Sifat digital GSM mengizinkan transmisi data (baik sinkronus maupun asinkronus) dari maupun ke terminal ISDN, meskIpun dukungan layanan paling dasar oleh GSM adalah telepon. Suara, meski pada dasarnya adalah analog, harus didigitalisasi. Metode yang dipakai ISDN, dan sistem telepon sekarang untuk memultipleksi suara diatas batang kecepatan tinggi dan lini serat optik, adalah Pulse Code Modulation (PCM). Dari awalnya, pendiri GSM
ingin meyakinkan kompatibilitas ISDN dalam layanan yang ditawarkan, meski pencapaian bitrate ISDN 64 Kbit/s sulit, dengan demikian memungkiri beberapa batasan sambungan radio. Sinyal 64 Kbit/s, meski sederhana untuk diimplementasikan, memiliki redundansi yang signifikan (Selian)
GSM, bersama dengan teknologi lainnya, adalah bagian dari evolusi telekomunikasi mobile nirkabel yang mencakup High-Speed Circuit- Switched Data (HSCSD), General Packet Radio Service (GPRS), Enhanced Data GSM Environment (EDGE), dan Universal Mobile Telecommunications Service (UMTS). (Rouse, M., 2018)
2.1.6 Komposisi Jaringan
Jaringan GSM memiliki empat bagian terpisah yang bekerja bersama untuk berfungsi secara utuh, yaitu perangkat mobile itu sendiri, base station subsystem (BSS), network switching subsystem (NSS), dan operation and support subsystem (OSS).
Gambar 2.10 Menara base transceiver station (BS). (Ray, n.d.)
Perangkat mobile tersambung ke jaringan melalui piranti keras.
Subscriber Identity Module (SIM) menyediakan jaringan dengan informasi
19
BSS menangani lalu lintas antara telepon seluler dengan NSS. BSS terdiri dari dua komponen utama: base transceiver station (BTS) dan base station controller (BSC). BTS memiliki peralatan yang berkomunikasi dengan telepon seluler, sebagain besar transmitter/receiver radio dan antena. BSC berkomunikasi dengan dan mengendalikan satu kelompok yang terdiri dari BTS- BTS.
Bagian NSS dari arsitektur jaringan GSM, sering dipanggil sebagai jaringan inti, melacak lokasi pemaggil untuk menjalankan pengiriman layanan seluler. Mobile carrier memiliki NSS. NSS memiliki banyak jenis bagian, termasuk mobile switching center (MSC) dan home location register (HLN).
Komponen-komponen ini melakukan fungsi-fungsi yang berbeda, seperti me- routing panggilan dan short message service (SMS) dan mengautentikasi dan menyimpan informasi akun pemanggil melalui kartu SIM. (Rouse, M., 2018)
e. Hypertext Transfer Protocol (HTTP)
Gambar 2.11 Penggunaan HTTP untuk world wide web. (What Is HTTP?, 2018)
Hypertext Transfer Protocol (HTTP) adalah seperangkat peraturan untuk mentransfer file (teks, gambar, suara, video, dan file-file multimedia lainnya) pada World Wide Web. Segera saat pengguna web membuka web browser mereka, pengguna secara tidak langsung menggunakan HTTP.
HTTP adalah protokol aplikasi yang berjalan diatas set protokol TCP/IP.
Konsep HTTP mencakup ide dimana file dapat mengandung referensi ke file lainnya dan saat dipilih, akan membuat permintaan transfer
lain. Web server apapun mengandung, selain file web page yang dapat dilayani, sebuah daemon HTTP, sebuah program yang dirancang untuk menunggu permintaan HTTP dan menanganinya pada saat kedatangan permintaan tersebut. Web browser adalah klien HTTP, mengirim permintaan ke mesin server. Saat pengguna browser memasukan permintaan file dengan membuka file web atau men-klik link hypertext, browser membentuk sebuah permintaan HTTP dan mengirimnya ke alamat Internet Protocol (IP) yang diindikasikan oleh Uniform Resource Locator (URL). Referensi URL Daemon HTTP pada mesin server tujuan menerima permintaan dan mengirimkan kembali file yang diminta atau file yang bersangkutan dengan permintaan (Rouse, M., 2006). HTTP digunakan untuk komunikasi dengan agen pengguna dan berbagai gateway, memperbbolehkan akses hipermedia ke protokol-protokol Internet yang ada seperti SMTP, NNTP,FTP, Gopher, dan WAIS. HTTP didesain untuk mengizinkan komunikasi dengan gateway tersebut, melalui proxy server, tanpa ada kehilangan data yang disampaikan oleh protokol-protokol sebelumnya (Yannakopoulos, 2003).
f. Universal Asynchronous Receiver/Transmitter (UART)
Gambar 2.12 Komunikasi UART pengirim dan penerima. (Circuit Basics, n.d.)
Universal Asynchronous Receiver/Transmitter (UART) adalah rangkaian fisik pada microcontroller atau integrated circuit (IC) yang berdiri sendiri, yang memainkan peran yang paling penting dalam
21
membuat transfer data diantara dua sistem terpisah dalam jarak yang sejauh mungkin. UART memiliki pengubah paralel ke serial untuk data yang dikirim dari komputer dan sebuah pengubah serial ke paralel untuk data yang datang melalui lini serial. UART juga memiliki buffer untuk menyimpan data untuk sementara dari transmisi kecepatan tinggi (Chinmay, 2014)
Dalam sebuah komunikasi UART, dua UART berkomunikasi langsung dengan satu sama lain. UART pengirim mengubah data paralel dari sebuah perangkat kendali seperti CPU ke bentuk data serial, mengirimnya dalam bentuk tersebut ke UART penerima, yang lalu mengubah data serial tersebut kembali ke data paralel untuk perangkat penerima. Data mengalir dari pin Tx dari UART pengirim ke pin Rx dari UART penerima.
UART mengirim data secara asynchronous, yang berarti tidak ada sinyal clock untuk mensinkronisasi keluaran bit dari UART pengirim ke proses sampling bit dari UART penerima. Sebaliknya, UART menggunakan bit start dan bit stop ke paket data yang dikirim. Bit-bit tersebut menandakan awal dan akhir paket data sehingga UART penerima mengetahui dimana untuk memulai dan mengakhiri pembacaan data.
(Circuit Basics, n.d.)
i. Cara Kerja UART
UART yang akan mengirim data menerima data dari data bus. Data bus tersebut digunakan untuk mengirim data ke UART oleh perangkat lain seperti CPU, memori, atau mikrokontroller. Data dikirim dari data bus ke UART pengirim dalam bentuk paralel. Setelah UART pengirim menerima data, UART pengirim menambah bit start, bit parity dan bit stop,
menjadikannya paket data. Lalu paket data dikeluarkan secara serial, bit per bit pada pin Tx. UART penerima mengubah data kembali ke paralel dan menghilangkan bit start, parity dan stop. Akhirnya, UART penerima mengirim kembali paket data dalam bentuk paralel ke data bus pada ujung penerima. (Circuit Basics, n.d.)
Gambar 2.13 Susunan paket data. (Circuit Basics, n.d.) ii. Bit Start
Lini transmisi data UART biasanya dilakukan pada tingkat tegangan tinggi saat tidak mengirim data. Untuk memulai transfer data, UART pengirim menarik lini transmisi dari tegangan tinggi ke rendah untuk satu siklus clock. Saat UART penerima mendeteksi transisi tegangan tinggi ke rendah, UART penerima mulai membaca bit bingkai data pada frekuensi baud rate. (Circuit Basics, n.d.)
iii. Bingkai Data
Bingkai data memuat data yang akan ditransfer. Data dapat terdiri dari 5 bit hingga 8 bit jika bit parity digunakan. Jika tidak, bingkai data dapat terdiri dari 9 bit. Biasanya, data dikirim dengan bit yang paling tidak signifikan terlebih dahulu. (Circuit Basics, n.d.)
iv. Bit Parity
Parity mendeskripsikan kegenapan atau keganjilan sebuah angka.
Bit parity adalah cara untuk UART penerima mengetahui apakah ada data yang telah berubah selama pengiriman. Bit dapat berubah karena radiasi elektromagnetik, baud rate yang tidak cocok, atau transfer data jarak jauh.
Setelah UART penerima membaca bingkai data, UART penerima menghitung jumlah bit dengan nilai 1 dan memeriksa apabila totalnya adalah angka ganjil atau genap. Jika bit parity-nya adalah 0 (even parity), bit-bit 1 pada bingkai data harus berjumlah angka genap. Jika bit parity-nya adalah 1 (odd parity), bit-bit 1 pada bingkai data harus berjumlah angka
23 v. Bit Stop
Untuk memberi tanda akhir paket data, UART pengirim mengubah lini transmisi data dari tegangan rendah ke tegangan tinggi untuk setidaknya selama durasi dua bit. (Circuit Basics, n.d.)
g. Sumber Daya Batrei
Baterai adalah sebuah perangkat yang menghasilkan elektron melalui reaksi elektrokimia, dan mengandung terminal positif dan negatif. Baterai terdiri dari satu atau lebih sel elektrokimia, yang mengubah energi kimia yang tersimpan menjadi energi listrik secara langsung. Saat sebuah beban eksternal tersambung ke baterai, elektron bergerak dari terminal negatif ke positif, menghasilkan arus listrik. Arus ini dapat menyalakan perangkat-perangkat yang membutuhkan daya listrik. Kecepatan arus baterai ditentukan oleh daya hambat internal baterai dan beban luar.
Baterai tersedia dalam banyak ukuran, dari sel miniatur untuk jam tangan dan alat bantu mendengar, hingga seukuran ruangan yang digunakan untuk memberikan daya standby untuk pusat data dan pertukaran telepon. (Battery, n.d.)
2.1.7 Jenis-jenis Baterai
Gambar 2.14 Baterai primer. (Kho, n.d.)