PENGEMBANGAN SISTEM KEMUDI MOBIL BASUDEWO
UNTUK MENINGKATKAN STABILITAS KENDARAAN DENGAN SIMULASI SOFTWARE MATLAB R2015a
Abdul Kadir Zuhri1), Dr. Ir. Bambang Sampurno, MT.2)
Jurusan D3 Teknik Mesin, Fakultas Teknologi Industri, ITS Surabaya E-mail : [email protected]
Abstrak
Salah satu sistem dalam kendaraan yang penting adalah sistem kemudi. Sistem kemudi merupakan pengendali arah suatu kendaraan. Sistem ini harus mampu mengendalikan dan menyeimbangkan kendaraan saat kendaraan bermanuver dalam jalan lurus, naik-turun, dan berbelok. Stabilitas kemudi yang baik meningkatkan keseimbangan kendaraan secara keseluruhan.
Steering lingkage dalam sistem kemudi berfungsi untuk mentransfer gaya kemudi dari tangan menuju ke roda depan. Dengan menggunakan sistem linkage berat total komponen kemudi menjadi lebih ringan. Pada tugas akhir ini akan dilakukan pengembangan sistem kemudi pada mobil basudewo dengan mekanisme linkage. Parameter yang akan dianalisis diantaranya posisi centre of gravity, skid kendaraan, guling kendaraan, gaya untuk memutar kemudi dan simulasi yaw kendaraan.
Setelah dilakukan analisis didapat gaya yang bekerja pada roda depan adalah 980,665 N, torsi pada knuckle arm adalah 27,177 ��, diameter steering wheel adalah 0,3 m, perbandingan panjang steering linkage yang digunakan adalah 1:4. Sehingga gaya yang dibutuhkan oleh pengemudi adalah 36,236 N. Untuk menjaga kendaraan agar stabil maka radius belok minimal pada kecepatan 40 km/jam adalah 15,73 m. Dari hasil perhitungan, dilakukan simulasi dengan hasil yaw rate cenderung stabil pada nilai 1-3deg/sec.
Kata kunci : steering linkage, stabil, yaw rate 1. PENDAHULUAN
Salah satu sistem dalam kendaraan adalah sistem kemudi. Sistem kemudi berfungsi mengendalikan arah suatu kendaraan. Sistem ini harus mampu mengendalikan dan menyeimbangkan kendaraan saat kendaraan bermanuver dalam jalan lurus, naik-turun, dan berbelok. Untuk itu diperlukan suatu perancangan sistem kemudi yang tepat untuk suatu kendaraan. Pada sistem kemudi mobil Basudewo yang sudah ada, masih memiliki permasalahan seperti, roda depan tidak stabil pada kecepatan di bawah 25 km/jam, pengendalian kemudi masih terlalu berat, mobil tidak mempunyai kecenderungan lurus saat roda kemudi dilepas, radius belok yang dilakukan terlampau kecil dari regulasi yang disyaratkan, dan mobil mengalami skid pada kecepatan 35-45 km/jam. Berbagai masalah di atas membuat sistem kemudi mobil basudewo kurang sempurna sehingga perlu adanya perbaikan pada sistem kemudi.
2. TINJAUAN PUSTAKA
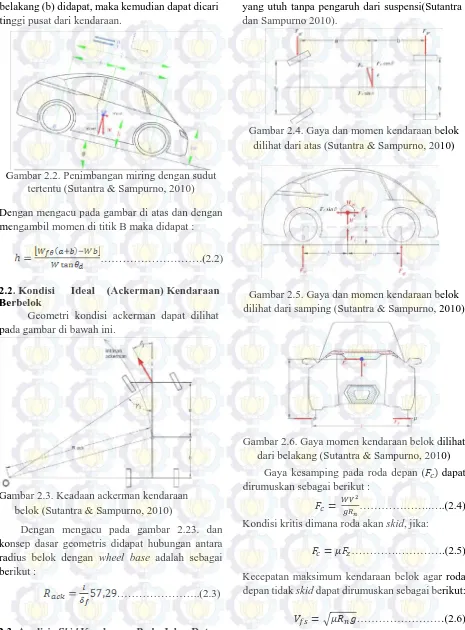
2.1. Mengatur Posisi Titik Berat Kendaraan Pengukuran (a) dan (b) dilakukan dengan menimbang bagian depan dan bagian belakang kendaraan pada posisi horizontal. Dengan memakai hasil penimbangan tersebut dan menerapkan konsep statika maka didapat :
………..(2.1)
Gambar 2.1. Cara penimbangan mobil basudewo (Sutantra & Sampurno, 2010)
belakang (b) didapat, maka kemudian dapat dicari tinggi pusat dari kendaraan.
Gambar 2.2. Penimbangan miring dengan sudut tertentu (Sutantra & Sampurno, 2010)
Dengan mengacu pada gambar di atas dan dengan mengambil momen di titik B maka didapat :
……….(2.2)
2.2. Kondisi Ideal (Ackerman) Kendaraan Berbelok
Geometri kondisi ackerman dapat dilihat pada gambar di bawah ini.
Gambar 2.3. Keadaan ackerman kendaraan
belok (Sutantra & Sampurno, 2010)
Dengan mengacu pada gambar 2.23. dan konsep dasar geometris didapat hubungan antara radius belok dengan wheel base adalah sebagai berikut :
………..(2.3)
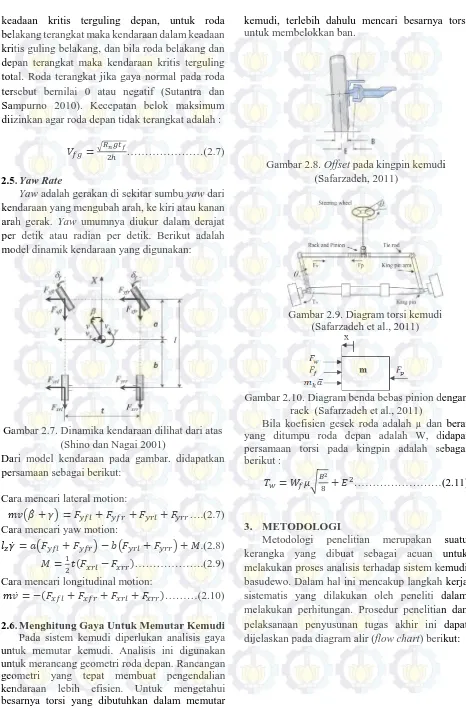
2.3. Analisis Skid Kendaraan Pada Jalan Datar Dalam menganalisis dinamika kendaraan belok untuk menghindari kompleksitas yang dapat membingungkan, maka pada analisis awal kendaraan dianggap sebagai sebuah benda kaku
yang utuh tanpa pengaruh dari suspensi(Sutantra dan Sampurno 2010).
Gambar 2.4. Gaya dan momen kendaraan belok dilihat dari atas (Sutantra & Sampurno, 2010)
Gambar 2.5. Gaya dan momen kendaraan belok dilihat dari samping (Sutantra & Sampurno, 2010)
Gambar 2.6. Gaya momen kendaraan belok dilihat dari belakang (Sutantra & Sampurno, 2010)
Gaya kesamping pada roda depan (��) dapat dirumuskan sebagai berikut :
�� = �� 2
���………..….(2.4) Kondisi kritis dimana roda akan skid, jika:
�� =���………….………….(2.5)
Kecepatan maksimum kendaraan belok agar roda depan tidak skid dapat dirumuskan sebagai berikut:
���=�����………(2.6)
keadaan kritis terguling depan, untuk roda belakang terangkat maka kendaraan dalam keadaan kritis guling belakang, dan bila roda belakang dan depan terangkat maka kendaraan kritis terguling total. Roda terangkat jika gaya normal pada roda tersebut bernilai 0 atau negatif (Sutantra dan Sampurno 2010). Kecepatan belok maksimum diizinkan agar roda depan tidak terangkat adalah :
��� =���2ℎ���………(2.7)
2.5.Yaw Rate
Yaw adalah gerakan di sekitar sumbu yaw dari kendaraan yang mengubah arah, ke kiri atau kanan arah gerak. Yaw umumnya diukur dalam derajat per detik atau radian per detik. Berikut adalah model dinamik kendaraan yang digunakan:
Gambar 2.7. Dinamika kendaraan dilihat dari atas (Shino dan Nagai 2001)
Dari model kendaraan pada gambar. didapatkan persamaan sebagai berikut:
Cara mencari lateral motion:
����̇+��=����+����+����+����….(2.7) Cara mencari yaw motion:
���̇=������+����� − ������+�����+�.(2.8)
�=1
2�(����− ����)……….(2.9) Cara mencari longitudinal motion:
��̇=−(����+����+����+����)………(2.10)
2.6.Menghitung Gaya Untuk Memutar Kemudi Pada sistem kemudi diperlukan analisis gaya untuk memutar kemudi. Analisis ini digunakan untuk merancang geometri roda depan. Rancangan geometri yang tepat membuat pengendalian kendaraan lebih efisien. Untuk mengetahui besarnya torsi yang dibutuhkan dalam memutar
kemudi, terlebih dahulu mencari besarnya torsi untuk membelokkan ban.
Gambar 2.8. Offset pada kingpin kemudi (Safarzadeh, 2011)
Gambar 2.9. Diagram torsi kemudi (Safarzadeh et al., 2011)
Gambar 2.10. Diagram benda bebas pinion dengan rack (Safarzadeh et al., 2011)
Bila koefisien gesek roda adalah µ dan berat yang ditumpu roda depan adalah W, didapat persamaan torsi pada kingpin adalah sebagai berikut :
�� =����� 2
8 +�2………(2.11)
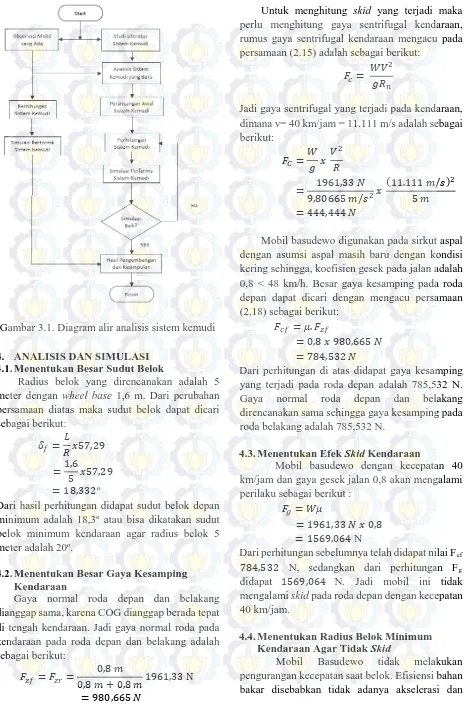
3. METODOLOGI
Gambar 3.1. Diagram alir analisis sistem kemudi
4. ANALISIS DAN SIMULASI 4.1.Menentukan Besar Sudut Belok
Radius belok yang direncanakan adalah 5 meter dengan wheel base 1,6 m. Dari perubahan persamaan diatas maka sudut belok dapat dicari sebagai berikut:
�� =� �� 57,29
=1,6
5 �57,29 = 18,332P
o
Dari hasil perhitungan didapat sudut belok depan minimum adalah 18,3o atau bisa dikatakan sudut belok minimum kendaraan agar radius belok 5 meter adalah 20o.
4.2.Menentukan Besar Gaya Kesamping Kendaraan
Gaya normal roda depan dan belakang dianggap sama, karena COG dianggap berada tepat di tengah kendaraan. Jadi gaya normal roda pada kendaraan pada roda depan dan belakang adalah sebagai berikut:
���=���=
0,8 �
0,8 �+ 0,8 �1961,33 N = 980,665 �
Untuk menghitung skid yang terjadi maka perlu menghitung gaya sentrifugal kendaraan, rumus gaya sentrifugal kendaraan mengacu pada persamaan (2.15) adalah sebagai berikut:
�� = �� 2
���
Jadi gaya sentrifugal yang terjadi pada kendaraan, dimana v= 40 km/jam = 11.111 m/s adalah sebagai berikut:
�� =�� � � 2
�
= 1961,33 � 9,80665 �/�2�
(11.111 �/�)2 5 � = 444,444 �
Mobil basudewo digunakan pada sirkut aspal dengan asumsi aspal masih baru dengan kondisi kering sehingga, koefisien gesek pada jalan adalah 0,8 < 48 km/h. Besar gaya kesamping pada roda depan dapat dicari dengan mengacu persamaan (2.18) sebagai berikut:
��� =�.���
= 0,8 � 980,665 � = 784,532 �
Dari perhitungan di atas didapat gaya kesamping yang terjadi pada roda depan adalah 785,532 N. Gaya normal roda depan dan belakang direncanakan sama sehingga gaya kesamping pada roda belakang adalah 785,532 N.
4.3.Menentukan Efek Skid Kendaraan
Mobil basudewo dengan kecepatan 40 km/jam dan gaya gesek jalan 0,8 akan mengalami perilaku sebagai berikut :
�� =��
= 1961,33 �� 0,8 = 1569,064 N
Dari perhitungan sebelumnya telah didapat nilai Fcf 784,532 N, sedangkan dari perhitungan Fg didapat 1569,064 N. Jadi mobil ini tidak mengalami skid pada roda depan dengan kecepatan 40 km/jam.
4.4.Menentukan Radius Belok Minimum Kendaraan Agar Tidak Skid
deselerasi pada engine. Karena kecepatan tetap maka, menggunakan kecepatan 40km/jam sebagai acuan. Untuk menghitung radius belok optimal pada kecepatan tersebut mengacu adalah sebagai berikut:
�=�� 2
��
=(11,11) 2
0,8�9,81 = 15,728 �
4.5.Menentukan Jarak COG Terhadap Jalan agar Kendaraan Tidak Mengalami Guling Langkah pertama untuk menghitung kemungkinan guling kendaraan adalah menghitung gaya normal pada masing-masing roda. Gaya guling dipengaruhi oleh letak COG dari permukaan jalan, semakin tinggi maka guling akan semakin besar. Untuk mencari tinggi COG mengacu sebagai berikut:
��ℎ=� 2�
ℎ=�� � 2�/��
=�
1961,33 � 1,22 �
1569,064 � = 0,75 m
Jadi didapat penempatan COG maksimal agar kendaraan tidak guling adalah 0,75 meter dari jalan. Namun pada perancangan mobil basudewo ini COG direncanakan 0,5 meter dari permukaan jalan. Selanjutnya menghitung kecepatan belok maksimum diizinkan agar roda depan tidak terangkat mengacu sebagai berikut :
��� =��2ℎ����
��=����2ℎ� 2
���
=(11,11� �⁄ � 2 � 0,5 �) 2
9,80665 �� ��2 1,2 �
= 10,49 �
Jadi radius belok minimum pada kecepatan 40 km/jam agar mobil tidak terguling adalah 10,49 meter
4.6.Menghitung Gaya-gaya pada Kemudi
Perhitungan gaya kemudi digunakan untuk mengetahui gaya yang terjadi pada kemudi. Persamaan yang digunakan adalah sebagai berikut:
��=���� 2
8 +� 2
= 980,665 �� 0.8�(0.08 �) 2
8 + (0.02 �)2 = 27,177 �m
�� =��� �
=27,177 �� 0,25 � = 108,708 �
��=�������
=108,708 �� 0,05 � 0,15 � = 36,236 N
Dari perhitungan di atas dengan diameter roda kemudi adalah 30 cm dan torsi pada knuckle arm 27,177 Nm maka didapat gaya untuk memutar kemudi adalah 36,236 N dan perbandingan Lk dan rp adalah 1:5.
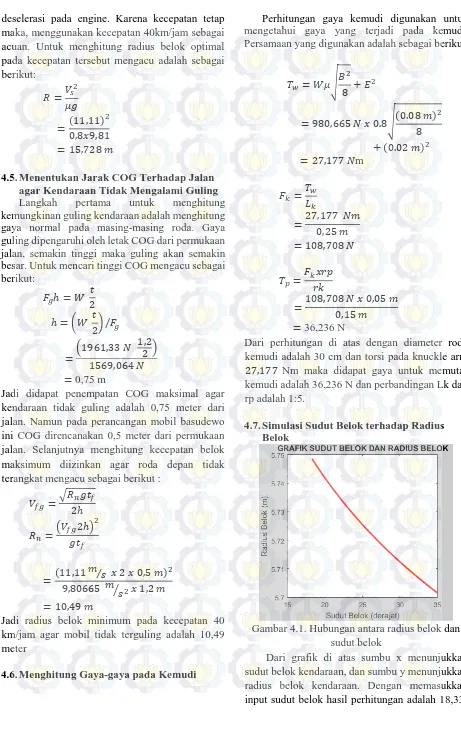
4.7.Simulasi Sudut Belok terhadap Radius Belok
Gambar 4.1. Hubungan antara radius belok dan sudut belok
dan wheel base 1,6 meter, didapat hasil simulasi bahwa semakin besar sudut belok yang dilakukan maka semakin kecil radius belok yang dihasilkan. 4.8.Simulasi Pengendalian Kemudi
• Radius belok minimum
Gambar 4.2. Radius belok minimum yang mampu dilakukan mobil basudewo
Penjelasan:
Gambar di atas menunjukkan grafik radius belok yang dihasilkan pada sudut kemudi konstan mobil basudewo. Pada grafik terlihat bahwa radius belok paling kecil yang dapat dilakukan adalah 5,703 meter. Pada radius belok 5,703 meter mobil basudewo mampu berjalan dengan kecepatan 5 m/s dengan seimbang.
• Radius belok pada 40 km/jam
Gambar 4.3. Radius belok pada kecepatan 40 km/jam
Penjelasan :
Gambar di atas menunjukkan grafik radius belok yang dihasilkan pada sudut kemudi 18,332o pada mobil basudewo. Kendaraan pada simulasi tersebut berbelok dengan kecepatan 11,11 m/s (40 km/jam). Pada grafik terlihat bahwa radius belok pada kecepatan 40 m/s yang dapat dilakukan adalah 6,648 meter.
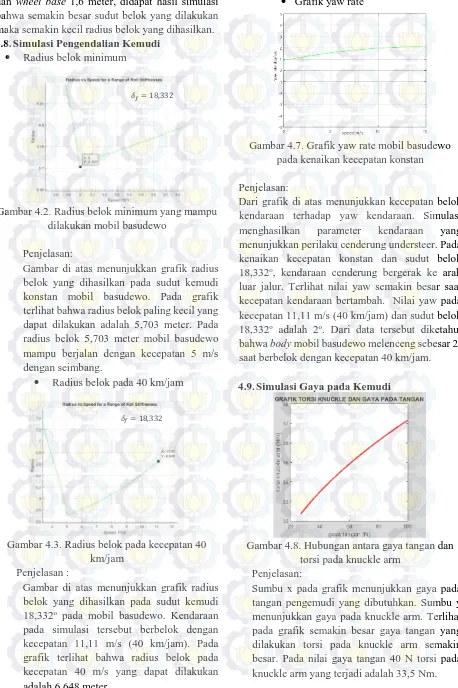
• Grafik yaw rate
Gambar 4.7. Grafik yaw rate mobil basudewo pada kenaikan kecepatan konstan
Penjelasan:
Dari grafik di atas menunjukkan kecepatan belok kendaraan terhadap yaw kendaraan. Simulasi menghasilkan parameter kendaraan yang menunjukkan perilaku cenderung understeer. Pada kenaikan kecepatan konstan dan sudut belok 18,332o, kendaraan cenderung bergerak ke arah luar jalur. Terlihat nilai yaw semakin besar saat kecepatan kendaraan bertambah. Nilai yaw pada kecepatan 11,11 m/s (40 km/jam) dan sudut belok 18,332o adalah 2o. Dari data tersebut diketahui bahwa body mobil basudewo melenceng sebesar 2o saat berbelok dengan kecepatan 40 km/jam.
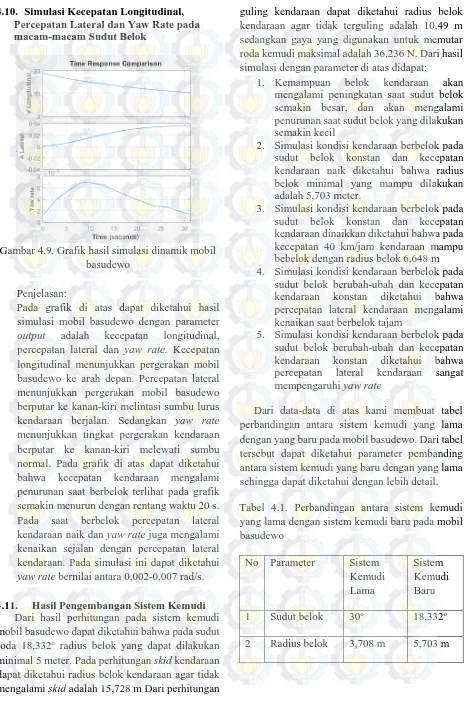
4.9.Simulasi Gaya pada Kemudi
Gambar 4.8. Hubungan antara gaya tangan dan torsi pada knuckle arm
Penjelasan:
Sumbu x pada grafik menunjukkan gaya pada tangan pengemudi yang dibutuhkan. Sumbu y menunjukkan gaya pada knuckle arm. Terlihat pada grafik semakin besar gaya tangan yang dilakukan torsi pada knuckle arm semakin besar. Pada nilai gaya tangan 40 N torsi pada knuckle arm yang terjadi adalah 33,5 Nm. ��= 18,332
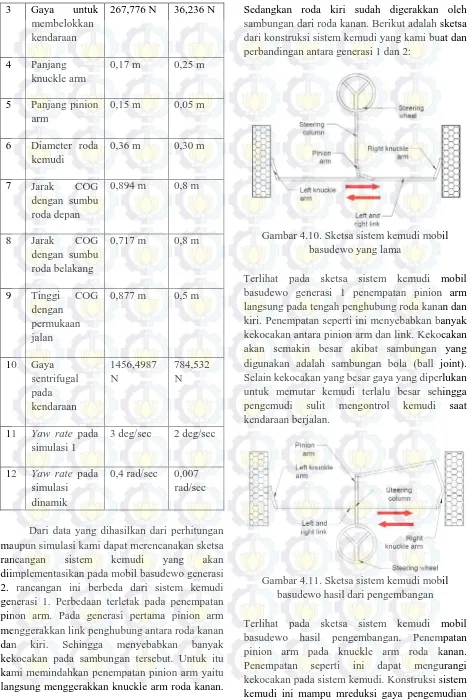
4.10. Simulasi Kecepatan Longitudinal, Percepatan Lateral dan Yaw Rate pada macam-macam Sudut Belok
Gambar 4.9. Grafik hasil simulasi dinamik mobil basudewo
Penjelasan:
Pada grafik di atas dapat diketahui hasil simulasi mobil basudewo dengan parameter output adalah kecepatan longitudinal, percepatan lateral dan yaw rate. Kecepatan longitudinal menunjukkan pergerakan mobil basudewo ke arah depan. Percepatan lateral menunjukkan pergerakan mobil basudewo berputar ke kanan-kiri melintasi sumbu lurus kendaraan berjalan. Sedangkan yaw rate menunjukkan tingkat pergerakan kendaraan berputar ke kanan-kiri melewati sumbu normal. Pada grafik di atas dapat diketahui bahwa kecepatan kendaraan mengalami penurunan saat berbelok terlihat pada grafik semakin menurun dengan rentang waktu 20 s. Pada saat berbelok percepatan lateral kendaraan naik dan yaw rate juga mengalami kenaikan sejalan dengan percepatan lateral kendaraan. Pada simulasi ini dapat diketahui yaw rate bernilai antara 0,002-0,007 rad/s.
4.11. Hasil Pengembangan Sistem Kemudi Dari hasil perhitungan pada sistem kemudi mobil basudewo dapat diketahui bahwa pada sudut roda 18,332o radius belok yang dapat dilakukan minimal 5 meter. Pada perhitungan skid kendaraan dapat diketahui radius belok kendaraan agar tidak mengalami skid adalah 15,728 m Dari perhitungan
guling kendaraan dapat diketahui radius belok kendaraan agar tidak terguling adalah 10,49 m sedangkan gaya yang digunakan untuk memutar roda kemudi maksimal adalah 36,236 N. Dari hasil simulasi dengan parameter di atas didapat:
1. Kemampuan belok kendaraan akan mengalami peningkatan saat sudut belok semakin besar, dan akan mengalami penurunan saat sudut belok yang dilakukan semakin kecil
2. Simulasi kondisi kendaraan berbelok pada sudut belok konstan dan kecepatan kendaraan naik diketahui bahwa radius belok minimal yang mampu dilakukan adalah 5,703 meter.
3. Simulasi kondisi kendaraan berbelok pada sudut belok konstan dan kecepatan kendaraan dinaikkan diketahui bahwa pada kecepatan 40 km/jam kendaraan mampu bebelok dengan radius belok 6,648 m 4. Simulasi kondisi kendaraan berbelok pada
sudut belok berubah-ubah dan kecepatan kendaraan konstan diketahui bahwa percepatan lateral kendaraan mengalami kenaikan saat berbelok tajam
5. Simulasi kondisi kendaraan berbelok pada sudut belok berubah-ubah dan kecepatan kendaraan konstan diketahui bahwa percepatan lateral kendaraan sangat mempengaruhi yaw rate
Dari data-data di atas kami membuat tabel perbandingan antara sistem kemudi yang lama dengan yang baru pada mobil basudewo. Dari tabel tersebut dapat diketahui parameter pembanding antara sistem kemudi yang baru dengan yang lama sehingga dapat diketahui dengan lebih detail.
Tabel 4.1. Perbandingan antara sistem kemudi yang lama dengan sistem kemudi baru pada mobil basudewo
No Parameter Sistem Kemudi Lama
Sistem Kemudi Baru
1 Sudut belok 30o 18,332o
3 Gaya untuk membelokkan kendaraan
267,776 N 36,236 N
4 Panjang knuckle arm
0,17 m 0,25 m
5 Panjang pinion arm
0,15 m 0,05 m
6 Diameter roda kemudi
0,36 m 0,30 m
7 Jarak COG
dengan sumbu roda depan
0,894 m 0,8 m
8 Jarak COG
dengan sumbu roda belakang
0,717 m 0,8 m
9 Tinggi COG dengan
permukaan jalan
0,877 m 0,5 m
10 Gaya sentrifugal pada kendaraan
1456,4987 N
784,532 N
11 Yaw rate pada simulasi 1
3 deg/sec 2 deg/sec
12 Yaw rate pada simulasi dinamik
0,4 rad/sec 0,007 rad/sec
Dari data yang dihasilkan dari perhitungan maupun simulasi kami dapat merencanakan sketsa rancangan sistem kemudi yang akan diimplementasikan pada mobil basudewo generasi 2. rancangan ini berbeda dari sistem kemudi generasi 1. Perbedaan terletak pada penempatan pinon arm. Pada generasi pertama pinion arm menggerakkan link penghubung antara roda kanan dan kiri. Sehingga menyebabkan banyak kekocakan pada sambungan tersebut. Untuk itu kami memindahkan penempatan pinion arm yaitu langsung menggerakkan knuckle arm roda kanan.
Sedangkan roda kiri sudah digerakkan oleh sambungan dari roda kanan. Berikut adalah sketsa dari konstruksi sistem kemudi yang kami buat dan perbandingan antara generasi 1 dan 2:
Gambar 4.10. Sketsa sistem kemudi mobil basudewo yang lama
Terlihat pada sketsa sistem kemudi mobil basudewo generasi 1 penempatan pinion arm langsung pada tengah penghubung roda kanan dan kiri. Penempatan seperti ini menyebabkan banyak kekocakan antara pinion arm dan link. Kekocakan akan semakin besar akibat sambungan yang digunakan adalah sambungan bola (ball joint). Selain kekocakan yang besar gaya yang diperlukan untuk memutar kemudi terlalu besar sehingga pengemudi sulit mengontrol kemudi saat kendaraan berjalan.
Gambar 4.11. Sketsa sistem kemudi mobil basudewo hasil dari pengembangan
dengan baik. Gaya pengemudian kecil dan kekocakan komponen kecil meningkatkan handling pemngemudi terhadap kendaraan.
5. PENUTUP
Berdasarkan analisis dan simulasi yang telah dilakukan terhadap sistem kemudi yang akan diimplementasikan dalam mobil basudewo generasi 2 dapat disimpulkan bahwa performa sistem kemudi meningkat, dinilai dari beberapa parameter yaitu:
1. Hasil evaluasi sistem kemudi mobil basudewo yang sudah ada menunjukkan bahwa kemampun belok yang dapat dilakukan mencapai 30o dengan radius belok yang dihasilkan 3,708 m. Kemudian didapat kecepatan belok dengan radius 15 meter adalah 10,84 m/s. Sedangkan gaya untuk memutar sistem kemudi adalah 267,776 N.
2. Didapat hasil rancangan kemudi untuk memperoleh radius belok minimal 5 meter dengan sudut kemudi yang dibutuhkan minimal 18,332o.
3. Didapat radius belok yang diperlukan rancangan baru sistem kemudi basudewo pada kecepatan 40 km/jam agar kendaraan tidak skid yaitu 15,728 m. 4. Didapat radius belok yang diperlukan
rancangan baru sistem kemudi basudewo pada kecepatan 40 km/jam agar kendaraan tidak terguling adalah 10,49 m.
5. Gaya yang diperlukan untuk memutar roda kemudi mengalami penurunan yang cukup jauh akibat perubahan perbandingan lengan kemudi yang digunakan. Dengan Lk direncanakan 25 cm, rp direncanakan 5 cm, dan radius roda kemudi direncanakan 15 cm, didapat gaya untuk memutar kemudi hanya 36,236 N.
6. Dari simulasi sistem kemudi dapat menunjukkan nilai yaw kendaraan cenderung stabil pada kecepatan yang disimulasikan naik dengan sudut belok 18,332o
7. DAFTAR PUSTAKA
1. Crolla, A David. 2009. Automotive Engineering. Oxford:Elsevier
2. Denton, Tom. 2011. Automobile Mechanical and Electrical System. Oxford:Elsevier
3. Knight, Andrew. 2000. Basic Matlab and Beyond. New York:CRC Press LLC
4. Pramono & Kaunang. 2012. Analisa Kestabilan Arah pada Kendaraan Formula Sapu Angin Speed Berdasarkan Variasi Posisi Titik Berat, Kecepatan dan Tes Dinamik Student Formula Japan 2013. Volume 1, Nomor
2.
http://digilib.its.ac.id/public/ITS-paper-32373-2109100118-Paper.pdf.
21 Mei 2015
5. Stone & Ball. 2004. Automotive Engineering Fundamentals. Warrendale PA:SAE International 6. Sutantra Sampurno. 2010. Teknologi
Otomotif. Surabaya:Guna Widya 7. Safarzadeh. 2011. Steer by Switch
System Design for Vehicles. Volume 6, Nomor
31. http://www.academicjournals.org/j
ournal/SRE/article-full-text-pdf/0BBCC1B31282. 30 Mei 2015
8. Shino & Nagai. 2001. Yaw-Moment Control of Electric Vehicle for Improving Handling and Stability. JSAE
review. http://www.sciencedirect.com/s