BAB II
DASAR TEORI
Bab ini membahas mengenai dasar teori dan hubungan antar perangkat keras yang digunakan yaitu mikrokontroler, Load Cell dan HX711, modul 7 segmen, motor servo HS-5645MG, motor DC Power Window, motor DC 12V, modul UBEC 3A 5-6V regulator, modul relay 12V dengan LED indicator, dan buzzer. Selain itu juga akan dibahas perangkat lunak yang digunakan sebagai pengendali utama alat. Berikut ini beberapa teori pendukung yang digunakan sebagai acuan
skripsi ini.
2.1. Mikrokontroler Arduino Mega 2560
Arduino Mega 2560 adalah mikrokontroler berbasis ATmega2560. Mega 2560 memiliki 54 digital input/output pins. Di mana 15 pin di antaranya dapat digunakan sebagai outputs PWM (Pulse Width Modullation ), 16 analog inputs, 4 UART (Universal Asynchronous Receiver-Transmitter), 16 MHz crystal oscillator, USB port, power jack, ICSP (In Circuit Serial Programming), dan tombol reset. Secara keseluruhan, Arduino Mega 2560 mengandung semua kebutuhan dalam mendukung pengoperasian mikrokontroler.
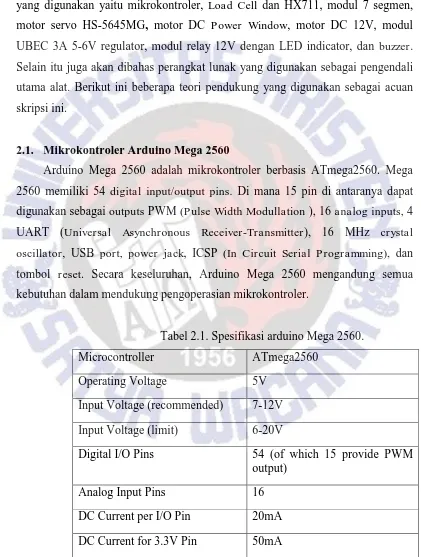
Tabel 2.1. Spesifikasi arduino Mega 2560.
Flash Memory 256 KB of which 8 KB used by bootloader
SRAM 8KB
EEPROM 4KB
Clock Speed 16MHz
LED_BUILDIN 13
Length 101.52mm
Width 53.3mm
Weight 37g
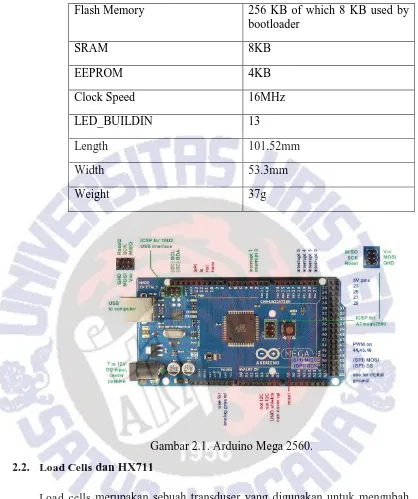
Gambar 2.1. Arduino Mega 2560.
2.2. Load Cells dan HX711
Load cells merupakan sebuah transduser yang digunakan untuk mengubah gaya (Force) menjadi sinyal elektrik. Load cells memanfaatkan teori perubahan resistansi pada sebuah objek metalik yang dikarenakan sebuah tekanan atau
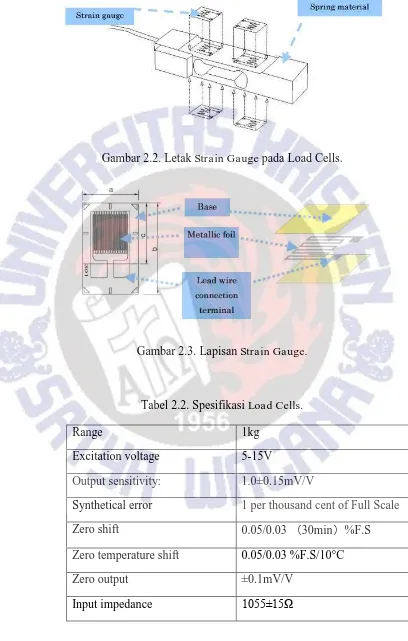
Gambar 2.2. Letak Strain Gauge pada Load Cells.
Gambar 2.3. Lapisan Strain Gauge.
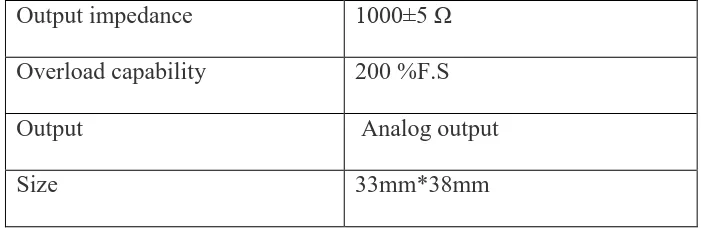
Tabel 2.2. Spesifikasi Load Cells.
Range 1kg
Excitation voltage 5-15V
Output sensitivity: 1.0±0.15mV/V
Synthetical error 1 per thousand cent of Full Scale
Zero shift 0.05/0.03 㸦30min㸧%F.S
Zero temperature shift 0.05/0.03 %F.S/10°C
Zero output ±0.1mV/V
Output impedance 1000±5 Ω
Overload capability 200 %F.S
Output Analog output
Size 33mm*38mm
HX711 adalah 24-bit Analog-to-Digital Converter (ADC) yang didesain khusus untuk penggunaan timbangan berat dengan presisi yang tinggi. HX711 membutuhkan tegangan 2,6-5,5V dan arus 10mA agar dapat beroperasi.
Gambar 2.4. Pemasangan Load Cells pada HX711
2.3. Modul 7 Segment Common Anode
Gambar 2.5. Modul 7 Segment
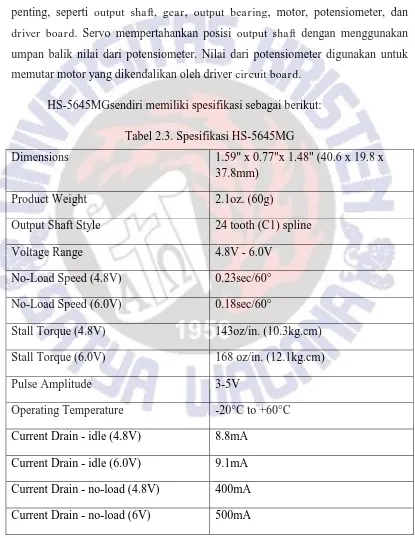
2.4. Motor Servo HITEC HS-5645MG
Motor Servo adalah motor yang menggunakan system closed loop sehingga motor dapat diatur untuk mempertahankan posisinya dengan tingkat presisi yang tinggi. Pada perancangan ini, motor servo yang digunakan adalah motor servo
non-continuous. Motor servo non-continuous hanya dapat bergerak pada sudut tertentu kurang dari satu putaran (360 °). Motor servo dikendalikan menggunakan sistem Pulse Width Modulation (PWM) atau modulasi lebar pulsa. Motor servo memiliki 3 pin. Yaitu : VCC, DATA, GND. Apabila pin diberi pulsa dengan waktu high 1ms, maka akan bergerak ke posisi 0°. Sedangkan apabila diberi pulsa
high selama 2ms, maka akan bergerak ke posisi 180°. Pemberian pulsa high di antara 1ms-2ms menyebabkan motor servo bergerak ke posisi antara 0° - 180°.
Untuk dapat bekerja dan mempertahankan posisinya, motor servo perlu diberi suplai pulsa tersebut sebanyak 30-60 kali perdetik. Hal ini sering disebut sebagai refresh rate. Refresh rate yang terlalu rendah dapat menyebabkan rendahnya akurasi, waktu respon dan torsi. Pemberian refresh rate yang terlalu tinggi dapat menyebabkan motor terus mengkoreksi posisinya sehingga membuat rangkaian menjadi panas dan cepat rusak. Servo memiliki bagian-bagian yang penting, seperti output shaft, gear, output bearing, motor, potensiometer, dan driver board. Servo mempertahankan posisi output shaft dengan menggunakan umpan balik nilai dari potensiometer. Nilai dari potensiometer digunakan untuk memutar motor yang dikendalikan oleh driver circuitboard.
HS-5645MGsendiri memiliki spesifikasi sebagai berikut:
Tabel 2.3. Spesifikasi HS-5645MG
Dimensions 1.59" x 0.77"x 1.48" (40.6 x 19.8 x 37.8mm)
Product Weight 2.1oz. (60g)
Output Shaft Style 24 tooth (C1) spline
Voltage Range 4.8V - 6.0V
No-Load Speed (4.8V) 0.23sec/60°
No-Load Speed (6.0V) 0.18sec/60°
Stall Torque (4.8V) 143oz/in. (10.3kg.cm)
Stall Torque (6.0V) 168 oz/in. (12.1kg.cm)
Pulse Amplitude 3-5V
Operating Temperature -20°C to +60°C
Current Drain - idle (4.8V) 8.8mA
Current Drain - idle (6.0V) 9.1mA
Current Drain - no-load (4.8V) 400mA
Continuous Rotation Modifiable Yes
Direction w/ Increasing PWM Signal Clockwise
Deadband Width 8µs
2.5. Motor DC
Motor DC adalah jenis motor listrik yang bekerja menggunakan sumber tegangan DC. Motor DC atau motor arus searah sebagaimana namanya, menggunakan arus langsung dan tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus di mana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
2.5.1 Motor DC Power Window
Motor power window merupakan sebuah motor DC dengan masukan 12V. Motor ini biasa digunakan pada sistem power window mobil, di mana motor power window ini berputar searah atau berlawanan arah jarum jam untuk menaikturunkan jendela mobil. Motor power window memiliki kecepatan tanpa beban 90rpm dengan arus tanpa beban 2,8A dan mencapai 9,0A saat memiliki beban. Torsi dari power window sendiri adalah 30 kg.cm.
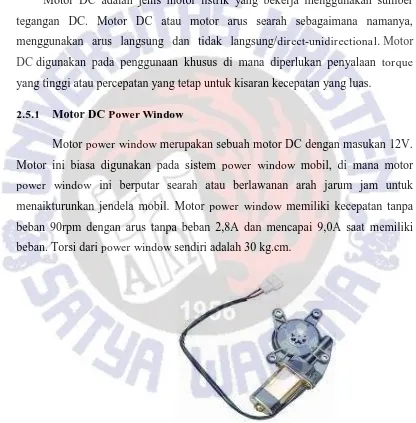
2.5.2 Motor DC 12V 20 RPM
Motor DC 12V 20RPM adalah sebuah motor DC dengan masukan 12V dengan arus penggunaan arus 1,2A. Motor ini memiliki kekuatan torsi 12 kg.cm dan kecepatan 20rpm.
Gambar 2.8. Motor DC 12V 20rpm
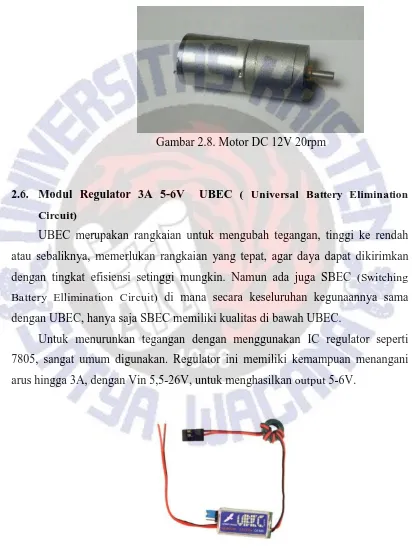
2.6. Modul Regulator 3A 5-6V UBEC ( Universal Battery Elimination Circuit)
UBEC merupakan rangkaian untuk mengubah tegangan, tinggi ke rendah atau sebaliknya, memerlukan rangkaian yang tepat, agar daya dapat dikirimkan dengan tingkat efisiensi setinggi mungkin. Namun ada juga SBEC (Switching
Battery Ellimination Circuit) di mana secara keseluruhan kegunaannya sama dengan UBEC, hanya saja SBEC memiliki kualitas di bawah UBEC.
Untuk menurunkan tegangan dengan menggunakan IC regulator seperti 7805, sangat umum digunakan. Regulator ini memiliki kemampuan menangani arus hingga 3A, dengan Vin 5,5-26V, untuk menghasilkan output 5-6V.
2.7. Modul Relay 12V dengan LED Indikator
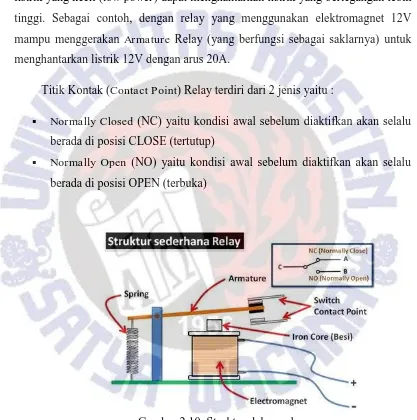
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen elektromekanikal yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat kontak saklar/Switch). Relay menggunakan prinsip elektromagnetik untuk menggerakkan kontak saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan relay yang menggunakan elektromagnet 12V mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 12V dengan arus 20A.
Titik Kontak (Contact Point) Relay terdiri dari 2 jenis yaitu :
Normally Closed (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Gambar 2.10. Struktur dalam relay
menghantarkan arus listrik di posisi barunya (NO). Posisi di mana Armature tersebut berada sebelumnya (NC) akan menjadi OPEN atau tidak terhubung. Pada saat tidak dialiri arus listrik, Armature akan kembali lagi ke posisi Awal (NC). Coil yang digunakan oleh Relay untuk menarik Contact Poin ke Posisi Close pada umumnya hanya membutuhkan arus listrik yang relatif kecil.
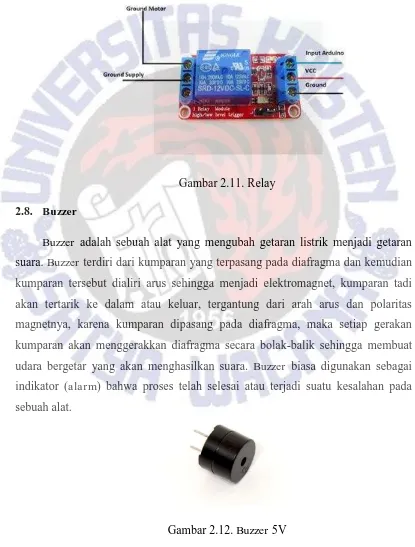
Gambar 2.11. Relay
2.8. Buzzer
Buzzer adalah sebuah alat yang mengubah getaran listrik menjadi getaran suara. Buzzer terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi
akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas
magnetnya, karena kumparan dipasang pada diafragma, maka setiap gerakan
kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat
udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai
indikator (alarm) bahwa proses telah selesai atau terjadi suatu kesalahan pada
sebuah alat.
2.9. Perangkat Lunak
Perangkat lunak yang digunakan sebagai pengendali utama dalam perancangan
ini adalah Arduino IDE (Integrated Developtment Enviroenment). Arduino IDE adalah sebuah perangkat lunak yang digunakan untuk memprogram arduino sehingga dapat melakukan fungsi-fungsi yang diinginkan melalui sintaks pemprograman. Arduino menggunakan bahasa pemrograman sendiri yang menyerupai bahasa C. Bahasa pemrograman Arduino (Sketch) sudah dilakukan perubahan untuk memudahkan pemula dalam melakukan pemrograman dari bahasa aslinya. Sebelum dijual ke pasaran, IC mikrokontroler Arduino telah ditanamkan suatu program bernama Bootlader yang berfungsi sebagai penengah antara compiler Arduino dengan mikrokontroler.
Arduino IDE dibuat dari bahasa pemrograman JAVA. Arduino IDE juga dilengkapi dengan library C/C++ yang biasa disebut Wiring yang membuat operasi input dan output menjadi lebih mudah. Arduino IDE ini dikembangkan dari software Processing yang dirombak menjadi Arduino IDE khusus untuk pemrograman dengan Arduino.