6 BAB II
DASAR TEORI
2.1 Umum
Motor asinkron atau motor induksi biasanya dikenal sebagai motor induksi yang merupakan motor arus bolak-balik yang paling luas penggunaannya. Penamaan ini berasal dari kenyataan bahwa arus rotor pada motor ini bukan diperoleh dari sumber tertentu tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan putaran medan putar yang dihasilkan oleh arus stator. Motor induksi terdiri dari dua bagian yaitu stator dan rotor dimana stator dihubungkan ke sumber tegangan AC. Rotor tidak dihubungkan secara listrik ke pencatu, tetapi mempunyai arus diinduksikan kedalamnya oleh kerja trafo dari stator. Oleh sebab itu stator kadang-kadang dianggap sebagai primer dan rotor sebagai skunder motor.
Mesin induksi pada umumnya banyak digunakan karena beberapa hal : 1. Bentuk yang sederhana dan konstruksinya yang kuat.
2. Memiliki efisiensi yang tinggi saat keadaan normal, tidak diperlukan sikat maka rugi-rugi gesek berkurang serta power faktor yang baik.
3. Dapat distart pada keadaan diam, tidak diperlukan motor tambahan untuk start, tidak perlu disinkron, startnya sederhana.
Selain itu motor induksi juga memiliki kelemahan, diantaranya : 1. Aus starting nya cukup tinggi.
2. Kecepatan dapat menurun sejalan dengan kenaikan beban. 3. Pada torsi start memiliki kekurangan.
2.2 Konstruksi M Motor induksi banyak dipergunakan yang baik. Secara um yaitu stator (kompon dipisahkan dengan ba Konstruksi motor indu
2.2.1 Stator
Komponen st bagian yang diam da
si Motor Induksi Tiga Fasa
ksi adalah motor listrik arus bolak-balik (a an, karena konstruksinya yang kuat dan karakt umum motor induksi tiga fasa memiliki dua kom
onen yang diam) dan rotor (bagian berputar n bagian rotor oleh celah udara yang sem
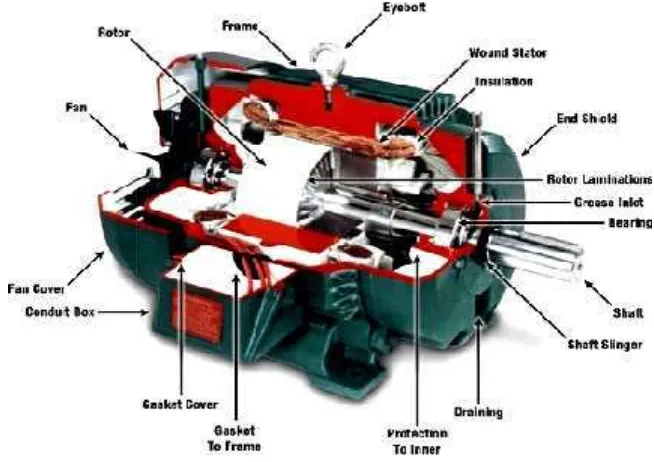
nduksi dapat diperlihatkan pada Gambar 2.1
Gambar 2.1 Konstruksi Motor Induksi
n stator adalah bagian terluar dari motor ya dan mengalirkan arus fasa. Rangka luarnya te
k (ac) yang paling akteristik kerjanya a komponen dasar tar), bagian stator sempit (air gap).
laminasi inti, lempen cage rotor) dan rotor be
Rotor sangkar lapis dengan slot (alur rotor. Konduktor rot aluminium atau logam slotnya masing-masin mengelas dan mengika
Rotor belitan akan tetapi konduktor jumlah kutub yang sa
engan inti yang telah disatukan, dan belitan st gkang luar untuk motor induksi tiga fasa dapat
(b)
Komponen stator motor induksi tiga fasa, (a) L (b) Tumpukan inti kertas isolasi pada bebera Tumpukan inti dan belitan dalam cangkang stat
or induksi tiga fasa dibedakan menjadi rotor sa or belitan (wound rotor).
ar (squirrel cage rotor) terdiri dari inti silinde alur) yang paralel sebagai tempat untuk memba
rotor berbentuk batangan (bar) yang terbuat ogam campuran. Masing-masing batang (bar) di
sing. Ujung batang konduktor di hubung singka gikat dengan cincin akhir (short-circuiting end-ri an (wound rotor) terdiri dari inti silinder yang konduktor rotornya berupa gulungan tiga fasa yang di sama dengan jumlah kutub stator. Bagian akhi
sangkar (squirrel
nder yang berlapis-mbawa konduktor buat dari tembaga, bar) diletakkan pada ngkat dengan cara nd-rings).
ang berlapis-lapis, g digulung dengan akhir belitan yang
terbuka dikeluarkan yang dihubungkan dengan tiga buah slip ring yang terisolasi yang menonjol pada tangkai rotor dan dihubungkan dengan sikat. Hal ini bertujuan agar dapat menambahkan tahanan tambahan pada rangkaian rotor selama periode starting untuk meningkatkan torsi start.
2.3 Jenis Motor Induksi Tiga Fasa
Ada dua jenis motor induksi tiga fasa berdasarkan rotornya yaitu: 1. Motor induksi tiga fasa sangkar tupai (squirrel-cage motor) 2. Motor induksi tiga fasa rotor belitan (wound-rotor motor)
kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama tetapi berbeda dalam konstruksi rotor.
2.3.1 Motor Induksi Tiga Fasa Sangkar Tupai (Squirrel-cage Motor)
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada motor sangkar tupai tiga fasa terbuat dari lapisan–lapisan pelat baja beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau plat baja yang dipabrikasi. Lilitan fasa ini dapat tersambung dalam hubungan delta (∆)
atau pun hubungan bintang (Y)
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.3 di bawah ini.
16 cincin ujung atau tahanan luar. Arus yang mengalir dalam belitan rotor berada dalam medan magnet yang dihasilkan stator, sehingga pada belitan rotor akan dihasilkan gaya (F). Gaya ini akan menghasilkan torsi (τ ) dan jika torsi yang dihasilkan lebih besar dari torsi beban, maka rotor akan berputar dengan kecepatan nryang searah dengan medan putar stator.
Untuk memperjelas prinsip kerja motor induksi tiga fasa, maka dapat dijabarkan dalam langkah-langkah berikut :
1. Pada keadaan beban nol ketiga phasa stator yang dihubungkan dengan sumber tegangan tiga phasa yang seimbang menghasilkan arus pada tiap belitan phasa. 2. Arus pada tiap phasa menghasilkan fluksi bolak-balik yang berubah-ubah. 3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak
lurus terhadap belitan phasa.
4. Akibat fluksi yang berputar timbul GGL pada stator motor yang besarnya adalah
= Φ
...(2.2) Atau
= 4,44 ... .(2.3) 5. Penjumlahan ketiga fluksi bolak-balik tersebut disebut medan putar yang berputar dengan kecepatan sinkron ns,besarnya nilai nsditentukan oleh jumlah kutub p dan frekuensi stator f yang dirumuskan dengan :
6. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (GGL) sebesar E2 yang besarnya :
= 4,44 ...(2.5) dimana :
= Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt) = Jumlah lilitan kumparan rotor
= Fluksi maksimum(Wb) ns = Medan putar stator (rpm)
7. Karena kumparan rotor merupakan rangkaian tertutup, maka GGL tersebut akan menghasilkan arus I2.
8. Adanya arus I2di dalam medan magnet akan menimbulkan gaya F pada rotor 9. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul
kopel beban, rotor akan berputar searah medan putar stator.
10. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr) disebut slip (s) dan dinyatakan dengan
%
18 E2s= tegangan induksi pada rotor dalam keadaan berputar (volt)
f2 = s.f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam keadaan berputar)
12. Bila ns= nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr< ns
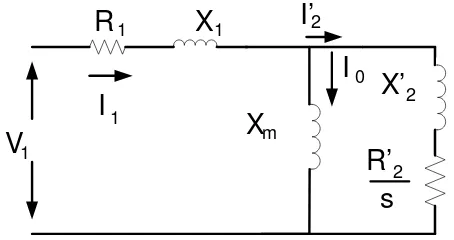
2.6 Rangkaian Ekivalen Motor Induksi
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor dan proses transfer energi dari stator ke rotor melalui induksi, sehingga motor induksi disebut juga trafo dengan kumparan sekunder yang berputar. Stator dari motor induksi sama dengan kumparan primer pada trafo, dan rotornya sama dengan kumparan sekunder dari transformator.
Rangkaian Stator
Motor induksi memiliki tahanan dan induktansi sendiri pada statornya, yang dapat dilihat dalam rangkaian ekivalen motor induksi. Tahanan stator di namakan R1dan reaktansi stator disebut X1. Tegangan internal stator disimbolkan dengan E1.
Tegangan terminal pada stator dinyatakan dengan persamaan 2.8:
V1 = E1+ I1(R1+jX1) volt ...(2.8) Dimana: V1 = Tegangan terminal stator (Volt)
E1 = GGL lawan (Volt)
I1 = Arus Stator (Ampere) R1 = Resistansi stator (Ohm)
R S
jX R
E I
2 2 2
=
.=
=
Keterangan Gambar 2.16 :
2.7 Torsi Motor Induksi Tiga Fasa
Torsi Motor Induksi adalah tenaga atau gaya yang dihasilkan oleh suatu motor yang digunakan untuk memikul beban, semakin besar torsinya semakin berat mesin itu bekerja dengan beban yang sama. Namun, torsi tergantung pada desain motor yang digunakan.
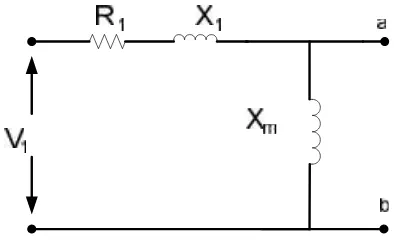
Suatu persamaan torsi pada motor induksi dapat dihasilkan dengan bantuan teori rangkaian thevenin. Dalam bentuk umumnya, teorema thevenin mengizinkan penggantian sembarang jaringan yang terdiri atas unsur-unsur rangkaian linier dan sumber tegangan fasor tetap. Rangkain rotor direfrensikan terhadap stator. Misalkan V1 tegangan input motor, dengan melihaat dari sisi terminal a-b, dapat dicari tegangan theveninnya. Perhatikan Gambar 2.17. berikut ini.
R
1X
1 2X’
I’
24 Untuk mendapatkan nilai tegangan thevenin maka tegangan terminal a-b pada rangkain ekivalen pada gambar diatas hasur dibuka. Perhatikan Gambar 2.17 berikut.
Gambar 2.18 Rangkain Thevenin
Dari Gambar 2.18 dapat dihitung tegangan thevenin (Vth)dan impedansi thevenin (Zth).
= ( ) (volt) ... (2.15)
= + = (( )) (Ohm) ... (2.16)
Rangkaian ekivalen pada Gambar 2.18 berubah menjadi seperti Gambar 2.19 berikut :
Gambar 2.19 Rangkaian Thevenin Motor Induksi.
=
( )
= = × 3
=
( )
=
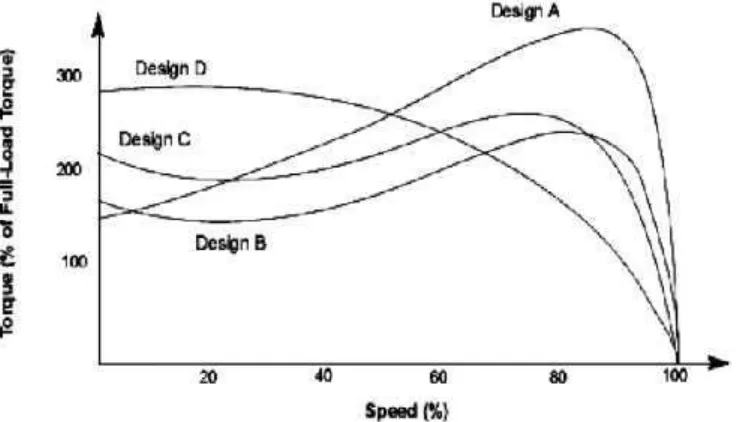
26 2.8 Disain Motor Induksi Tiga Fasa
Motor asinkron yang sering kita temukan sehari-hari misalnya adalah kipas angin, mesin pendingin, kereta api listrik gantung, dan lain sebagainya. Untuk itu perlu diketahui kelas-kelas dari motor tersebut untuk mengetahui unjuk kerja dari motor tersebut, Adapun kelas-kelas tersebut adalah sebagai berikut
1. Kelas A : Torsi start normal, arus start normal dan slip kecil
Tipe ini umumnya memiliki tahanan rotor sangkar yang rendah. Slip pada beban penuh kecil atau rendah namun efisiensinya tinggi. Torsi maksimum biasanya sekitar 21 dari torsi beban penuh dan slipnya kurang dari 21. Motor kelas ini berkisar hingga 20 Hp.
2. Kelas B : Torsi start normal, arus start dan slip rendah
Torsi start kelas ini hampir sama dengan kelas A tetapi arus startnya berkisar 75 Ifl.Slip dan efisiensi pada beban penuh juga baik. Kelas ini umumnya berkisar antara 7,5 Hp sampai dengan 200 Hp. Penggunaan motor ini antara lain : kipas angin, boiler dan lainnya.
3. Kelas C: Torsi start tinggi dan arus start kecil
Kelas ini memiliki resistansi rotor sangkar yang ganda yang lebih besar dibandingkan dengan kelas B. Oleh sebab itu dihasilkan torsi start yang lebih tinggi pada arus start yang rendah, namun bekerja pada efisiensi dan slip yang rendah dibandingkan kelas A dan B.
4. Kelas D : Torsi start tinggi, slip tinggi
Kelas ini biasanya memiliki resistansi rotor sangkar tunggal yang tinggi sehingga dihasilkan torsi start yang tinggi pada arus start yang rendah.
Sebagai tamba memperkenalkan disa softstart, namun disain k
Gambar 2.21
2.9 Aliran Daya P Pada motor induksi rotor, sehingga daya diinputkan ke rotor. dirumuskan dengan :
= 3. .
mbahan pada keempat kelas tersebut diatas, disain kelas E dan F, yang sering disebut sain kelas ini sekarang sudah ditinggalkan.
ar 2.21 Karakteristik torsi dan keceapatan motor
berbagai disain aya Pada Motor Induksi
induksi, tidak ada sumber listrik yang langsun daya yang melewati celah udara sama deng or. Daya total yang dimasukan pada kumpa n :
= 3. . (Watt) ...
tas, NEMA juga but motor induksi
or induksi pada
sung terhubung ke dengan daya yang paran stator (Pin)
28
θ = Perbedaaan sudut phasa antara arus masukan dengan tegangan sumber.
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik pada poros motor. Berbagai rugi-rugi yang timbul selama proses konversi energi listrik antara lain :
1. Rugi-rugi tetap (fixed losses), terdiri dari :
Rugi-rugi inti stator (Pi)
= . (Watt) ... ..(2.21)
rugi-rugi gesek dan angin
2. Rugi-rugi Variabel, terdiri :
rugi-rugi tembaga stator (Pis)
= 3. (Watt) ... ..(2.22)
rugi-rugi tembaga rotor (Ptr)
= 3. . (Watt) ... ..(2.23)
Daya pada celah udara (Pcu) dapat dirumuskan dengan :
= (Watt) ... ..(2.24) Jika dilihat pada rangkaian rotor, satu-satunya elemen pada rangkain ekivalen yang mengkonsumsi daya pada celah udara adalah resistor R2/s. Oleh karena itu daya pada celah udara dapat juga ditulis dengan :
= 3. . (watt) ... ..(2.25)
Apabila rugi-rugi tembaga dan rugi-rugi inti ini dikurangi dengan daya input motor, maka akan diperoleh besarnya daya listrik yang diubah menjadi daya mekanik.
Besarnya daa mekanik yang dibangkitkan motor adalah :
= (Watt) ... ..(2.26)
= 3. . 3. .
= 3. . . ( )
= ( )(Watt) ... ..(2.27)
Dari persamaan (2.24) dan (2.26) dapat dinyatakan hubungan rugi-rugi tembaga dengan daya pada celah udara :
= . (Watt) ... ..(2.28) Karena daya mekanik yang dibangkitkan pada motor merupakan selisih dari daya pada celah udara dikurangi dengan rugi-rugi tembaga rotor, maka daya mekanik dapat juga ditulis dengan :
= (1 )(Watt) ... ..(2.29) Daya output akan diperoleh apabila daya yang dikonversikan dalam bentuk daya mekanik dikurangi dengan rugi-rugi gesek dan angin, sehingga daya keluarannya :
Gam input (masukan), atau d
(%) = × 100% = × 100% = × 100%
= + + + & +
ambar 2.22 Diagram aliran daya motor induksi
= rugi-rugi tembaga pada belitan stator (Wat = rugi-rugi inti pada stator (Watt)
= daya yang transfer melalui celah udara(Wa = rugi-rugi tembaga pada belitan rotor (Watt = daya mekanik keluaran (output) (Wattt) = rugi-rugi gesek dan angin (Watt) = stray losses (Watt)
otor Induksi Tiga Phasa
dari suatu motor induksi didefinisikan se induksi untuk mengubah energi listrik menjadi
bagai perbandingan/rasio daya output (keluara tau dapat juga dirumuskan dengan :
= 3 . . . cos 1
Dari persamaa pada besarnya rugi menentukan efisiensi dapat dibebani secara pe
Gam
ra penuh atau pembebanan simulasi yang harus di
ambar 2.23 Efisiensi pada motor induksi
ya yang diinputkan ke rotor (Watt) gi-rugi tembaga rotor (Watt)
ya mekanik dalam bentuk putaran (Watt)
dari motor induksi dapat diperoleh dengan mela
saja, keluaran motor adalah putaran, jadi supaya putaran atau kecepatan tetap terjaga pada saat tegangan turun maka arus pada rotor diperbesar untuk mempertahankan putaran motor dan slip pun besar. Persamaan berikut dapat digunankan untuk menghitung persentase slip/geseran.
=
× 100
%
dimana nr= ns(1-s) ... (2.34) 2.12 Jatuh Tegangan
Jatuh tegangan adalah selisih antara tegangan ujung pengirim dengan tegangan ujung penerima. Secara matematis dapat dituliskan sebagai berikut :
= ... ..(2.35) Dimana :
= jatuh tegangan (volt)
= tegangan di sisi pengirim (volt) = tegangan di sisi penerima (volt)
Atau dapat juga ditulis dalam bentuk persentase :
(%) = × 100% ... ..(2.36)
Dimana :
34 penampang penghantar. Besarnya jatuh tegangan dinyatakan baik dalam persen atau dalam besaran volt. Besarnya batas atas dan batas bawah ditentukan oleh kebijaksanaan perusahaan listrik terkait. Penurunan tegangan maksimum pada beban penuh yang dibolehkan di beberapa titik pada jaringan adalah [SPLN 72 : 1987] :
1. SUTM = 5%dari tegangan kerja bagi sisitem radial
2. SKTM = 2%dari tegangan kerja pada system spindle dan gugus 3. Trafo distribusi = 3%dari tegangan kerja
4. Saluran tegangan rendah = 4% dari tegangan kerja tergantung kepadatan beban
5. Sambungan rumah = 1%dari tegangan nominal
Adapun penyebab jatuh tegangan (voltage drop) adalah : 1. Jauhnya jaringan,jauhnya jarak transformator dari gardu induk
2. Rendahnya tegangan yang diberikan gardu induk atau rendahnya tegangan keluaran dari transformator distribusi
3. Sambungan penghantar yang tidak baik sehingga bermasalah di sisi tegangan menengah dan tegangan rendah
4. Pemilihan jenis penghantar, ukuran penghantar dan konektor yang tidak tepat
5. Arus yang dihasilkan
Untuk menghitung jatuh tegangan, diperhitungkan reaktansinya, maupun faktor dayanya yang tidak sama dengan satu. Maka tegangan yang hilang disepanjang saluran penghantar adalah :
= ( cos + sin ) ... ..(2.37)
Dimana :
I = arus beban
R = tahanan saluran (ohm) X = reaktansi saluran (ohm)