TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik pada
Program Studi Teknik Elektro
disusun oleh:
Lucia Santi Palupi D
NIM : 035114004
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2008
Current Harmonic Frequency Component
Analyzer of Electrical Device
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the SARJANA TEKNIK Degree
In Electrical Engineering
By:
Lucia Santi Palupi D
Student Number : 035114004
ELECTRICAL ENGINEERING DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2008
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 12 november 2008
Lucia Santi Palupi D
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama
: Lucia Santi Palupi D
Nomor Mahasiswa
: 035114004
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
UNIT PENGONTROL BERBASIS MIKROKONTROLER PADA SISTEM
PENGANALISIS KOMPONEN FREKUENSI HARMONISA ARUS
BEBAN PERALATAN LISTRIK
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan
kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan,
me-ngalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data,
mendistribusikan secara terbatas, dan mempublikasikannya di Internet atau media
lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun
memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai
penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Per Aspera Ad Astra
(dari duri menjadi bintang)
“Untuk segala sesuatu ada masanya, untuk apapun di bawah
langit ada waktunya. Ada waktu untuk lahir, ada waktu untuk
meninggal, ada waktu untk menanam, ada waktu untuk
mencabut yang ditanam; …… ada waktu untuk menangis, ada
waktu untuk tertawa; …… Ia membuat segala sesuatu indah
pada waktunya,………”
PENGKHOTBAH 3:1~11
There can be Miracles when you believe
Kupersembahkan karya tulis ini kepada :
* Papa dan mamaku
* Orang-orang yang sayang kepadaku
Penggunaan beban peralatan listrik non linear, mengakibatkan bentuk
gelombang arus tidak sama dengan bentuk gelombang tegangan. Bentuk
gelombang (arus) yang tidak sinus akan menimbulkan adanya komponen
harmonisa yang menyebabkan banyak implikasi pada jala-jala listrik. Unit
pengontrol berbasis mikrokontroler pada sistem penganalisis komponen frekuensi
harmonisa arus beban peralatan listrik mampu merekam bentuk gelombang yang
diperoleh dari sumber agar sesuai dengan kenyataan. Bentuk gelombang nantinya
dapat terlihat pada unit penampil komponen harmonisa arus peralatan listrik dan
akan mempermudah pengukuran nilai rmsnya.
Unit pengontrol berbasis mikrokontroler pada sistem penganalisis
komponen frekuensi harmonisa arus beban peralatan listrik menggunakan dua
mikrokontroler. Mikrokontroler I berfungsi memberikan sinyal kendali digital ke
BPF agar BPF ditala pada frekuensi tertentu (fundamental atau harmonisa),
menerima amplitudo tegangan komponen harmonisa keluaran BPF melalui ADC,
dan mengirimkan data hasil pembacaan amplitudo komponen harmonisa ke PC.
Mikrokontroler II berfungsi mengolah data sinyal tegangan keluaran penguat dari
sensor arus dan tegangan melalui ADC agar diketahui nilai
I
rms,
V
rms, dan
P
rmsyang akan ditampilkan pada LCD.
Dari hasil pengujian dan analisa, mikrokontroler I sudah terkoneksi
dengan baik, mampu mengirim dan menerima data. Mikrokontroler II belum
dapat mengukur nilai I
rmsdengan baik karena tingkat kesalahan pengukuran yang
besar pada skala amplitudo masukan maksimum 5Ampere dengan tingkat
kesalahan pengukuran yang terjadi kurang dari 42%; pada skala amplitudo
masukan maksimum 500mA dengan tingkat kesalahan pengukuran yang terjadi
kurang dari 70%; pada skala amplitudo masukan maksimum 50mA dengan
tingkat kesalahan pengukuran yang terjadi kurang dari 51%; nilai V
rmsdengan
tingkat kesalahan kurang dari 2% pada jangkauan 195~240 V
rms.Untuk
pengukuran terbaik, disarankan agar alat ini digunakan pada jangkauan masukan
maksimal 5Vp. Pengukuran di luar jangkauan di atas dapat menghasilkan tingkat
kesalahan yang lebih besar.
Kata kunci: rms, harmonisa, mikrokontroler.
will generates the components of harmonic that made many implication in
electrics powerline. The control unit able to record the waveform obtained from
source in the order to fit the reality. The waveform will be displayed in display
unit of harmonic component of electric equipments current, and also will be easier
to measure the rms value.
The
microcontroller-based
analyzer control unit on the system of
harmonics frequency component in the electrical load current made use two
microcontrollers. Microcontroller I was functioned to transmit digital control
signal to the BPF so that the BPF is set on a particular frequency (fundamental or
harmonic), to receive voltage amplitude of output harmonic component from BPF
through ADC, and to send the result data of the harmonic component amplitude to
the PC. Microcontroller II was functioned to process the voltage signal data of the
reinforcement output from the current and voltage sensor through ADC, then the
values of
I
rms, V
rms,
and
P
rmswhich would be calculate and presented on the LCD
calculated.
Based on the test and analysis results, 1
stmicrocontroller had been
connected well and was able to transmit and receive data.2
ndMicrocontroller
could make a calculation of I
rmson a 5Ampere maximum input of amplitude scale
with the calculating error rate valued for less than 42%; on a 500mA maximum
input of amplitude scale with the calculating error rate valued for less than 70%;
on a 50mA maximum input of amplitude scale with the calculating error rate
valued for less than 51%; the value of V
rmswith the calculating error rate valued
for less than 2% on the range of 195~240 V
rms.
For the best calculation, it is
suggested that this device is used on a 5Vp maximum input range. The calculation
beyond the range was mentioned above might lead into a bigger error rate.
Keywords: rms, harmonic, microcontroller.
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas
berkat dan rahmat-Nya sehingga penulis dapat menyelesaikan karya tulis berjudul
Unit Pengontrol Berbasis Mikrokontroler pada Sistem Penganalisis Komponen
Frekuensi Harmonisa Arus Beban Peralatan Listrik.
Karya tulis ini merupakan salah satu syarat untuk memperoleh gelar
Sarjana Teknik pada Program Studi Teknik Elektro Universitas Sanata Dharma.
Penulisan skripsi ini didasarkan pada hasil-hasil yang penulis dapatkan selama
tahap perancangan, pembuatan dan pengujian alat.
Penulisan skripsi ini tidak terlepas dari bantuan berbagai pihak. Untuk itu,
penulis mengucapkan terima kasih kepada:
1. Kedua orang tua penulis yang telah memberikan semangat dan doa yang tak
pernah putus sehingga penulis dapat menyelesaikan tugas akhir ini.
2. Bapak Martanto, S.T., M.T., selaku dosen pembimbing I karya tulis yang telah
meluangkan waktu, tenaga, dan pikirannya untuk membimbing penulis.
3. Bapak A. Bayu Primawan, S.T., M.Eng., selaku dosen pembimbing II karya
tulis yang telah meluangkan waktu, tenaga, dan pikirannya untuk
membimbing penulis.
4. Ibu Bernadeta Wuri Harini S.T., M.T. selaku Ketua Jurusan Teknik Elektro
Universitas Sanata Dharma Yogyakarta.
5. Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC Selaku Dekan Fakultas
Teknik Universitas Sanata Dharma Yogyakarta.
7. Segenap dosen dan laboran Teknik Elektro Universitas Sanata Dharma.
8. Segenap karyawan sekretariat Fakultas Teknik.
9. Teman-teman mahasiswa jurusan Teknik Elektro dan semua pihak yang tidak
dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari
penulisan karya tulis ini. Oleh karena itu segala kritik dan saran yang bersifat
membangun sangat penulis harapkan.
Akhir kata, semoga skripsi ini berguna bagi semua pihak dan dapat
menjadi bahan kajian lebih lanjut.
Yogyakarta, 4 November 2008
Penulis
HALAMAN JUDUL
... i
HALAMAN JUDUL DALAM BAHASA INGGIS
... ii
HALAMAN PENGESAHAN OLEH PEMBIMBING ...
iii
HALAMAN PENGESAHAN OLEH PENGUJI ...
iv
PERNYATAAN KEASLIAN KARYA ...
v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI
KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ...
vi
PERSEMBAHAN DAN MOTTO ...
vii
INTISARI ...
viii
ABSTRACT ...
ix
KATA PENGANTAR ...
x
DAFTAR ISI ...
xii
DAFTAR GAMBAR ...
xv
DAFTAR TABEL ...
xviii
DAFTAR LAMPIRAN ...
xix
BAB I. PENDAHULUAN ...
1
1.1 Judul ... 1
1.2 Latar Belakang ... 1
1.3 Tujuan ... 4
1.4 Manfaat ... 4
1.5 Batasan Masalah ... 5
1.6 Metodologi Penelitian ... 6
1.7 Sistematika Penulisan ... 6
BAB II. DASAR TEORI ...
7
2.1 Nilai Rms ... 7
2.1.1 Nilai Rms dari Gelombang Sinusoidal... 8
2.3 Pengubahan Digital ke Analog ... 13
2.4 Mikrokontroler AT89S52 ... 16
2.4.1 Fasilitas yang dimiliki AT89S52 ... 16
2.4.2
Deskripsi fungsi pin dari AT89S52 ... 17
2.4.3
Pewaktu CPU ... 19
2.4.4
Komunikasi Serial ... 20
2.5
Pengubah Level TTL ke Level
Serial
... 23
2.6
Konfigurasi Port Serial... 24
2.7 LCD HD44780 ... 26
2.7.1 DDRAM... 27
2.7.2 CGRAM ... 28
2.7.3 CGROM ... 28
BAB III. PERANCANGAN RANGKAIAN
... 29
3.1 Diagram Blok ... 29
3.2
Perancangan Perangkat Lunak ... 30
3.2.1 Kerangka Utama Program Mikrokontroler I
... 30
3.2.2 Kerangka Utama Program Mikrokontroler II ... 35
3.3 Perancangan Perangkat Keras ... 45
3.3.1 Antarmuka Mikrokontroler AT89s52 dengan HD44780... 45
3.3.2 Antarmuka Mikrokontroler AT89s52 dengan ADC ... 46
BAB IV. HASIL DAN PEMBAHASAN ...
48
4.1 Program Mikrokontroler I
... 48
4.1.1 Cek Koneksi
... 48
4.1.2 Pemilihan Skala Arus dan Orde BPF ... 49
4.2 Analisa Alat dan Program Mikrokontroler II
... 52
4.2.1 Analisa Data Tegangan
... 52
4.2.2 Analisa Data Arus
... 54
4.2.3 Analisa Data Daya... 61
BAB V. KESIMPULAN DAN SARAN ...
67
5.1 Kesimpulan ... 67
5.2 Saran... 68
DAFTAR PUSTAKA
LAMPIRAN
Gambar 2-2. Pulsa kotak ... 9
Gambar 2-3. Gelombang segitiga ... 10
Gambar 2-4. Sinyal analog
x(t)
.[3] ... 12
Gambar 2-5. Deretan pulsa
x
p(t)
.[3] ... 12
Gambar 2-6. Hasil pencuplikan
x
s( )
t
.[3] ... 13
Gambar 2-7. Diagram blok pengubah analog ke digital ... 13
Gambar 2-8 konfigurasi kaki pada ADC0804 ... 15
Gambar 2-9 Konfigurasi Pin AT89S52 ... 17
Gambar 2-10 Menghubungkan kristal sumber detak ... 20
Gambar 2-11 Susunan bit dalam register SCON ... 23
Gambar 2-12 Level tegangan TTL dan RS232 pada pengiriman huruf ‘A’
tanpa bit paritas ... 24
Gambar 2-13 merupakan gambar konektor
port
serial
DB-9 pada bagian
belakang CPU [5] ... 25
Gambar 2-14. Pin LCD HD44780 ... 27
Gambar 2-15. Hubungan posisi tampilan dan alamat DDRAM ... 28
Gambar 3-1. Diagram blok perancangan sistem penganalisis komponen
frekuensi harmonisa arus beban peralatan listrik ... 29
Gambar 3-2. Diagram alir kerangka utama program mikrokontroler I ... 31
Gambar 3-3. Diagram alir ambil data dari PC ... 33
Gambar 3-5. Diagram alir kirim data ke PC ... 34
Gambar 3-6. Diagram alir kerangka utama program mikrokontroler I ... 36
Gambar 3-7. Diagram alir subrutin inisialisasi LCD ... 37
Gambar 3-8. Diagram alir subrutin kirim perintah ... 37
Gambar 3-9. Diagram alir subrutin ambil nilai tegangan dan arus,
kuadratkan, dan jumlahkan ... 39
Gambar 3-10. Diagram alir subrutin hitung rerata dan akar ... 40
Gambar 3-11. Diagram alir subrutin akarkan ... 42
Gambar 3-11(lanjutan). Diagram alir subrutin akarkan ... 43
Gambar 3-12. Diagram alir subrutin hitung hasil akhir ... 45
Gambar 3-13. Diagram alir subrutin kirim data ... 45
Gambar 3-14. Antarmuka AT89s52 dengan HD44780 ... 46
Gambar 3-15. Antarmuka AT89s51 dengan HD44780 ... 47
Gambar 4-1. Eksekusi menu cek koneksi ... 49
Gambar 4-2. Eksekusi menu pemilihan skala arus dan orde BPF ... 50
Gambar 4-3. Eksekusi menu mulai ... 51
Gambar
4-4.
Pengamatan pengesetan frekuensi pusat BPF oleh
mikrokontroler I ... 54
Gambar 4-5. Grafik kesalahan pengukuran tegangan (V
rms) ... 56
Gambar 4-6. Grafik kesalahan pengukuran tegangan (%) ... 56
Gambar 4-7. Grafik kesalahan pengukuran arus (%) ... 57
Gambar 4-10. Grafik kesalahan pengukuran arus (%) ... 61
Gambar 4-11. Grafik kesalahan pengukuran arus (I
rms) ... 61
Gambar 4-12. Offset Gain pada skala 500mA (V
p) ... 61
Gambar 4-13. Grafik kesalahan pengukuran tegangan (%) ... 63
Gambar 4-14. Grafik kesalahan pengukuran arus (V
rms) ... 63
Gambar 4-15. Offset Gain pada skala 50mA (V
p) ... 63
Gambar 4-16. Hasil pengamatan V
rmsalat pembanding ... 66
Gambar 4-17. Hasil pengamatan I
rmsalat pembanding ... 66
Gambar 4-18. Hasil pengamatan V
rms, I
rms, dan P
rmsLCD ... 66
Tabel 2-1
Fungsi khusus port 3 ... 18
Tabel 2-2 Konfigurasi kaki-kaki DB-9... 25
Tabel 4-1. Data pengamatan pengambilan dan pengolahan data bit dari
ADC serta data bit masukan manual oleh mikrokontroler I ... 52
Tabel
4-2.
Data pengamatan pengesetan frekuensi pusat BPF oleh
mikrokontroler I ... 54
Tabel 4-3. Data kesalahan pengukuran tegangan (V
rms) ... 56
Tabel 4-4. Data kesalahan pengukuran arus (I
rms) skala amplitudo masukan
maksimum 5Ampere ... 58
Tabel 4-5. Data kesalahan pengukuran arus (I
rms) skala amplitudo masukan
maksimum 500 mA ... 60
Tabel 4-6. Data kesalahan pengukuran arus (I
rms) skala amplitudo masukan
maksimum 50 mA ... 62
Tabel 4-7. Data pengamatan daya (P
rms) dan perhitungan teoritis skala
amplitudo masukan maksimum 5 Ampere ... 65
Tabel 4-8. Data pengamatan daya (P
rms) dan perhitungan teoritis skala
amplitudo masukan maksimum 500 mA ... 65
Tabel 4-9. Data pengamatan daya (P
rms) dan perhitungan teoritis skala
amplitudo masukan maksimum 500 mA ... 65
Listing Program Mikrikontroler II ... L7
Datasheet
AT89s52 ... L47
Datasheet
HD44780U ... L76
Datasheet
ADC0804 ... L87
PENDAHULUAN
1.1
Judul
Unit Pengontrol Berbasis Mikrokontroler pada Sistem Penganalisis Komponen Frekuensi Harmonisa Arus Beban Peralatan Listrik
1.2
Latar Belakang
Kemajuan dalam bidang elektronika membawa perkembangan dalam hal peralatan listrik dan peralatan elektronika. Peralatan listrik baik dalam dunia industri maupun peralatan rumah tangga mengarah pada aplikasi elektronika.
Penggunaan beban peralatan listrik non linear, mengakibatkan bentuk gelombang arus tidak sama dengan bentuk gelombang tegangan. Bentuk gelombang yang tidak sinus akan menimbulkan adanya komponen harmonisa, yaitu frekuensi-frekuensi lain selain frekuensi fundamental. Komponen harmonisa arus dapat menimbulkan banyak implikasi pada jala-jala listrik. Selain itu dapat menimbulkan rugi-rugi daya, menginterferensi saluran komunikasi, dan dapat menyebabkan pemanasan.[1]
Dalam keseharian sering dilakukan pengukuran nilai rms ( root-mean-square) dari tegangan dan arus AC dengan menggunakan alat pengukur tegangan dan arus (baik analog maupun digital), namun
sebagian besar voltmeter yang ada hanya akurat jika digunakan untuk mengukur nilai rms tegangan AC yang berbentuk sinusoidal. Oleh karena itu, akan lebih baik jika ada alat ukur yang akurat untuk mengukur nilai rms tegangan dan arus AC yang mempunyai bentuk selain sinusoidal dan dapat menampilkan bentuk gelombangnya, misalnya mempunyai bentuk pulsa kotak, dan segitiga.[1]
Pada sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik diperlukan peralatan yang mampu merekam bentuk gelombang yang diperoleh dari sumber agar sesuai dengan kenyataan yang nantinya bentuk gelombang dapat terlihat pada unit penampil. Untuk memperoleh bentuk gelombang arus beban peralatan listrik, sistem menggunakan sensor arus berupa resistor yang akan diambil besaran tegangan pada saat resistor dialiri arus listrik, sedangkan sensor tegangan menggunakan resistor sebagai pembagi tegangan dan dilakukanpenguatan tegangan. Sinyal tegangan keluaran penguat dari sensor arus dan tegangan selanjutnya diolah oleh mikrokontroler II setelah sebelumnya melalui ADC untuk diketahui nilai Irms dan Vrms sehingga dapat dihitung nilai
digital kemudian direkam oleh mikrokontroler I sesuai dengan komponen frekuensi harmonisa orde tertentu sesuai penalaan BPF. Setiap kali mengubah frekuensi pusat dari BPF, dilakukan pengukuran terhadap amplitudo gelombang. Hasil pembacaan amplitudo komponen harmonisa ini dapat langsung dikirimkan ke PC. Kemudian data diproses lebih untuk menggambarkan grafik hubungan antara amplitudo arus beban komponen harmonisa sebagai fungsi orde frekuensi harmonisa listrik jala-jala. Sarana bantu pemrograman menggunakan Visual Basic.
1.3 Tujuan
Tujuan dari penelitian ini adalah untuk membuat suatu unit pengontrol berbasis mikrokontroler pada sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik.
1.4 Manfaat
Manfaat yang dapat dicapai dari penelitian ini yaitu :
1. Tersedianya suatu unit pengontrol berbasis mikrokontroler pada sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik.
2. Tersedianya suatu literatur tentang aplikasi mikrokontroler untuk instrumentasi, yaitu alat ukur nilai rms dari masukan tegangan AC dan sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik.
3. Dengan tersedianya unit pengontrol ini, maka akan mempermudah pengukuran nilai rms dan komponen harmonisa arus peralatan listrik. 4. Memberi hasil nilai rms yang akurat untuk masukan tegangan AC
1.5
Batasan Masalah
Perangkat yang akan dirancang mempunyai batasan-batasan sebagai berikut:
1. Proses pengendalian berbasis pemrograman mikrokontroler.
2. Menggunakan 2 buah mikrokontroler, sebagai penghitung Prms dan
pengendali sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik.
3. Mikrokontroler I (AT89s52) sebagai pengendali sistem dengan mengendalikan sistem dengan mengatur frekuensi tengah pada BPF yang berupa frekuensi fundamental 50Hz beserta frekuensi harmonisanya hingga frekuensi yang ke-31, dengan keluaran berupa frekuensi dan tegangan pada frekuensi tertentu yang akan digunakan sebagai data bagi unit penampil pada sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik.
4. Mikrokontroler II (AT89s52) sebagai penghitung Prms dengan
masukan berupa tegangan dan arus yang akan dihitung rmsnya dan diolah agar mendapatkan Prms yang akan ditampilkan pada LCD.
1.6
Metodologi Penelitian
Agar dapat melakukan perancangan perangkat lunak dengan baik, maka penulis membutuhkan masukan serta referensi yang didapatkan dengan metode :
1. Studi kepustakaan yang mencakup pengumpulan dan penyusunan literatur dan bahan dari referensi yang ada.
2. Perancangan, pembuatan, dan pengujian perangkat lunak maupun perangkat keras serta kasimpulan.
3. Penyusunan laporan.
1.7
Sistematika Penulisan
Sistematika penulisan dibagi menjadi beberapa bab, yaitu:
BAB I. Berisi latar belakang penelitian, tujuan dan manfaat penelitian, batasan masalah, metodologi penelitian, dan sistematika penulisan.
BAB II. Berisi dasar teori meliputi nilai rms (root-mean-square), pencuplikan, pengubahan analog menjadi digital (ADC), mikrokontroler AT89S52, pengubah level TTL ke level serial, konfigurasi port serial, LCD HD44780
BAB III. Berisi perancangan perangkat lunak dan perangkat keras. BAB IV. Berisi pembahasan.
DASAR TEORI
2.1
Nilai Rms (
root-mean-square
)
Nilai rms digunakan untuk mengukur efektifitas sebuah sumber arus dalam memberikan daya pada sebuah beban dan menentukan keakuratan penghantaran suatu alat dan tingkat arus suatu alat. Nilai rms suatu gelombang dapat dihitung sebagai:
dt I T I
T rms=
∫
02
1
(2-1)
dengan T adalah perioda waktu dan I adalah arus dari gelombang. Nilai rms gelombang arus yang berbentuk pulsa sinusoidal dan pulsa kotak dapat dihitung juga dengan persamaan 2-1. Secara umum, nilai rms merupakan akar dari kuadrat rata-rata suatu gelombang. Apabila gelombang menjadi rusak sampai pada harmonisanya, nilai rms dapat dihitung secara individual. Nilai rms dari gelombang, sesungguhnya dapat didekati dengan kombinasi nilai rms setiap harmonisanya, seperti ditunjukkan pada persamaan 2-2.
2 2 2 2 ) ( ) 2 ( ) 1
( rms ... rmsn
rms dc
rms I I I I
I = + + + + (2-2) dengan Idc adalah arus komponen DC,
) 1 (
rms I dan
) (n
rms
I adalah nilai rms dari frekuensi fundamental dan komponen harmonik ke-n, secara individu.
Pengukuran nilai rms berguna dalam perhitungan daya, seperti dalam rumus berikut ini:
rms rms ac V I
P = (2-3)
dengan Pacadalah daya ac, Irms adalah nilai rms arus, dan Vrms adalah nilai
rms tegangan yang didapat melalui perhitungan yang serupa untuk mendapatkan nilai Irms. [2]
2.1.1 Nilai Rms dari Gelombang Sinusoidal
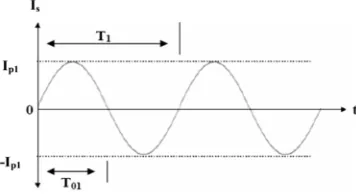
Nilai puncak (peak) gelombang arus yang berbentuk sinusoidal merupakan nilai maksimum gelombang baik pada bagian positif ataupun negatif. Nilai ini ditunjukkan oleh Ip1 dan −Ip1pada gambar 2-1.
Gambar 2-1. Gelombang sinusoidal.
Nilai puncak-ke-puncak (peak-to-peak) gelombang merupakan nilai dari puncak positif ke puncak negatif dan dapat dihitung dengan
1
2 p pp I
I = (2-4)
2
1 p rms
I
I = (2-5)
Untuk gelombang arus yang berbentuk setengah gelombang sinusoidal, nilai rms yang dihasilkan dapat dihitung dengan
1 01 1
. 2T
T I
Irms = p (2-6)
2.1.2 Nilai Rms dari Gelombang Pulsa Kotak
Nilai puncak (peak) gelombang arus yang berbentuk pulsa kotak merupakan nilai maksimum gelombang pada bagian positif. Nilai ini ditunjukkan oleh Ip2pada gambar 2-2.
Gambar 2-2. Pulsa kotak.
Nilai rms dari gelombang arus yang berbentuk pulsa kotak adalah
2 02 2
T T I
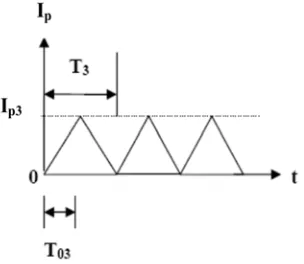
2.1.3 Nilai Rms dari Gelombang Segitiga
Nilai puncak (peak) gelombang arus yang berbentuk segitiga merupakan nilai maksimum gelombang pada bagian positif. Nilai ini ditunjukkan oleh I
p3 pada gambar 2-3.
Gambar 2-3. Gelombang segitiga.
Nilai rms dari gelombang segitiga adalah
(
)
(
)
3 3 03 3 3 2 03 3 03 03 3 3 3T T T T T T T T p I rmsI − + −
−
= (2-8)
Untuk nilai T3 =2T03 maka nilai rms dari gelombang segitiga yang
dihasilkan sesuai dengan persamaan 2-9.
3 1
3 p rms I
I = (2-9)
2.2 Pencuplikan
saklar dan mekanisme penyimpan bekerja untuk menghasilkan deretan cuplikan dari sinyal masukan yang kontinyu. Hasil dari proses pencuplikan disebut Pulse Amplitude Modulation (PAM) karena interval keluaran yang berturutan dapat digambarkan sebagai deretan pulsa dengan amplitudo tertentu sesuai dengan sinyal masukan. Sinyal analog yang mendekati sinyal masukan bisa didapatkan kembali (direkonstruksi) dari sinyal PAM dengan low-pass filter sederhana.
Sinyal dengan band terbatas, yaitu sinyal yang tidak mempunyai komponen spektral diatas f
m hertz. Sinyal dengan band terbatas dapat
ditentukan secara unik dengan nilai tercuplik pada interval T
s detik, dengan
m s f T 2 1 ≤ (2-10)
dan laju pencuplikan (sampling rate) adalah
s s
T
f = 1 (2-11)
Dalam hal ini terdapat batasan untuk laju pencuplikan, dikenal sebagai kriteria Niquist (Niquist criterion), yaitu
m s f
f ≥2 (2-12)
sehingga laju pencuplikan sering juga disebut sebagai laju Niquist. Kriteria ini merupakan syarat cukup supaya sinyal analog masukan bisa didapatkan kembali seutuhnya dari sinyal diskret tercuplik. [3]
pencuplikan praktis mempunyai amplitudo dan lebar pulsa yang berhingga. Gelombang yang dicuplik merupakan isyarat terbatasi waktu. Pencuplikan dilakukan dengan mengkalikan sinyal analog x(t) pada gambar 2-4 dengan deretan pulsa x
p(t) pada gambar 2-5.
Gambar 2-4. Sinyal analog x(t).[3]
Gambar 2-5. Deretan pulsa x p(t).[3]
Setiap pulsa mempunyai lebar T dan amplitudo 1T . Proses pengkalian dapat diartikan sebagai proses pembukaan dan penutupan suatu saklar.
Deretan data hasil pencuplikan xs
( )
t yang ditunjukkan pada gambar 2-6 dinyatakan sebagai( ) ( ) ( )
t xt x txs = p (2-13)
Gambar 2-6. Hasil pencuplikan xs
( )
t .[3]2.3
Pengubahan Analog ke Digital
Pengubah sinyal analog menjadi sinyal digital disebut penyandi atau encoder. Gambar 2-7 memperlihatkan diagram blok pengubah analog ke digital.
Gambar 2-7. Diagram blok pengubah analog ke digital.
Gambar 2-7 memperlihatkan masukan berupa sinyal analog yang diubah menjadi bentuk biner pada bagian keluaran dari bit paling rendah (LSB) sampai bit yang paling tinggi (MSB).
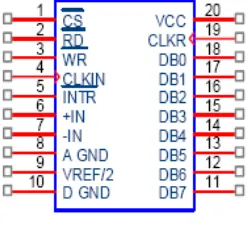
dan dapat menerima masukan analog berkisar 0Volt sampai 5Volt. Macam-macam pin (kaki) yang dimiliki oleh IC ADC0804:
a. CS
Berfungsi sebagai masukan. Pin ini sebagai chip select dari kontrol mikroprosesor.
b. RD
Berfungsi sebagai masukan. Pin ini sebagai kontrol untuk membaca data dari mikroprosesor.
c. WR
Berfungsi sebagai masukan. Pin ini sebagai kontrol untuk menulis data ke mikroprosesor.
d. CLK IN
Berfungsi sebagai masukan. Pin ini sebagai pengatur detak. e. INTR
Berfungsi sebagai keluaran. Pin ini sebagai sarana untuk memberikan interupsi pada masukan interupsi mikroprosesor.
f. V (+) IN
Berfungsi sebagai masukan. Pin ini merupakan jalan masuk bagi sinyal analog masukkan positif.
g. V (-) IN
h. A GND
Berfungsi sebagai masukan daya. Pin ini sebagai pembulatan analog. i. VREF 2
Berfungsi sebagai masukan. Pin ini merupakan jalan masuk bagi tegangan acuan yang lain (±).
j. D GND
Berfungsi sebagai keluaran. Pin ini sebagai pembulatan digital. k. DB7-DB0
Berfungsi sebagai keluaran. Pin ini merupakan jalan keluaran bagi data keluaran bit7 sampai bit0.
l. CLKR
Berfungsi sebagai masukan. Pin ini sebagai pengatur detak dengan menghubungkannya ke resistor eksternal.
m. VCC(Or ref)
Berfungsi sebagai masukan daya. Pin ini sebagai jalan masuk untuk catu daya +5volt dan tegangan acuan primer.
Resolusi ADC dengan jumlah bit (n) dapat dihitung dengan
step Volt V
resolusi nmak
1 2 −
= (2-14)
2.4 Mikrokontroler
AT89S52
Mikrokontroler AT89S52 merupakan mikrokontroler yang kompatibel dengan Mikrokontroler 8052 buatan Intel dan mendukung komunikasi serial [4].
2.4.1 Fasilitas yang dimiliki AT89S52
Pada mikrokontroler AT89S52 mempunyai beberapa fitur standar yaitu memiliki 4K bytes memori flash, 128 bytes RAM, 32 jalur I/O,
watchdog timer, dua data pointer register, dua timer/counter 16-bit, 5 sumber interupsi (dua buah interupsi eksternal dan tiga buah interupsi internal), port serial full-duplex, on-chip oscillator, dan untai clock.
Gambar 2-9 Konfigurasi Pin AT89S52.
2.4.2
Deskripsi fungsi pin dari AT89S52
1. Port 0 (kaki 32-39). Pada perancangan komponen minimum, port ini dapat digunakan untuk port I/O dwi-fungsi. Untuk perancangan yang lebih besar (dengan memori luar), port ini menjadi bus data dan bus alamat rendah.
2. Port 1 (kaki 1-8). Port ini dipakai untuk port I/O dwi-fungsi yang dilengkapi dengan pullup internal. Saat flash programing jalur P1.5, P1.6, P1.7 digunakan masing-masing untuk saluran MOSI, MISO, dan SCK.
3. Port 2 (kaki 21-28). Port ini dipakai untuk I/O atau sebagai bus byte
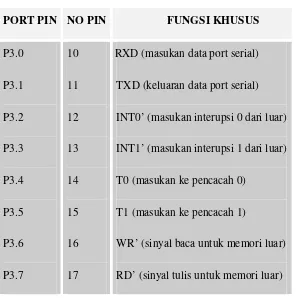
Tabel 2.-1.Fungsi khusus port 3
PORT PIN NO PIN FUNGSI KHUSUS
P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7 10 11 12 13 14 15 16 17
RXD (masukan data port serial) TXD (keluaran data port serial) INT0’ (masukan interupsi 0 dari luar) INT1’ (masukan interupsi 1 dari luar) T0 (masukan ke pencacah 0)
T1 (masukan ke pencacah 1)
WR’ (sinyal baca untuk memori luar) RD’ (sinyal tulis untuk memori luar)
4. Port 3 (kaki 10-17). Port ini dipakai untuk I/O dwi-fungsi atau untuk fungsi kendali khusus. Fungsi khusus port 3 ditunjukkan pada tabel 2.1.
5. PSEN (Program store enable, kaki 29). PSEN merupakan keluaran untuk sinyal kendali yang mengijinkan memori program (kode) eksternal.
6. ALE (Address Latch Enable, kaki 30). Sinyal keluaran ALE untuk
demultiplexing bus data dan alamat. Jika port 0 digunakan sebagai bus
setengah kedua siklus memori, jalur-jalur port 0 disediakan untuk data masukan atau keluaran ketika perpindahan data sedang dilakukan. 7. Vpp (External Access, kaki 31). Untuk eksekusi program dari memori
eksternal maka kaki ini harus dihubungkan ground, sedangkan jika mengakses program secara internal maka harus dihubungkan Vcc. 8. RST (Reset, kaki 9). Jika diberikan tegangan tinggi selama paling
sedikit 2 siklus mesin, maka register internal akan diisi dengan harga tertentu untuk kondisi awal sistem program.
9. Vcc (kaki 40) yang digunakan sebagai suplai tegangan mikrokontroler. 10.GND (kaki 20) digunakan sebagai ground mikrokontroler.
11.XTAL (kaki 19) dan (kaki 18) sebagai masukan dari rangkaian osilator.
2.4.3 Pewaktu CPU
10 pF dan bila jenis keramik besar kapasitor yang terpasang adalah 40 pF ± 10pF sesuai dengan yang dinyatakan pada datasheet.
Gambar 2-10 Menghubungkan kristal sumber detak
2.4.4 Komunikasi Serial
Ada dua macam cara pengiriman (transmisi) secara serial yaitu komunikasi sinkron dan komunikasi asinkron. Pada komunikasi sinkron sinyal detak dikirim bersama-sama dengan data serial. Selanjutnya dalam transmisi data serial secara asinkron, detak tidak dikirim bersama data
serial.
Port serial pada AT89S52 bersifat duplex penuh atau full-duplex, artinya port serial bisa menerima dan mengirim data pada waktu bersamaan. Port serial memiliki penyangga penerima yaitu serial buffer
Port serial pada AT89S52 bisa digunakan dalam empat mode kerja. Dari ke-empat mode tersebut, 1 mode diantaranya bekerja secara sinkron dan tiga mode lainnya bekerja secara asinkron. Semua mode dapat diatur melalui register kontrol serial (SCON). Keempat mode kerja tersebut adalah :
Mode 0 Mode ini bekerja secara sinkron, data serial dikirim dan diterima melalui kaki P3.0 (RxD), sedangkan kaki P3.1 (TxD) dipakai untuk menyalurkan detak pendorong data serial yang dibangkitkan AT89S52. Data dikirim/diterima 8 bit sekaligus, dimulai dari bit yang bobotnya paling kecil atau LSB (bit 0), diakhiri dengan bit yang bobotnya paling besar atau MSB (bit 7). Kecepatan pengiriman data (baudrate) adalah 1/12 frekuensi kristal yang digunakan.
Mode 1 Pada mode ini, data dikirim melalui kaki P3.1 (TxD) dan diterima melalui kaki P3.0 (RxD) secara sinkron (begitu juga mode 2 dan 3). Pada mode ini, data dikirim/diterima 10 bit sekaligus, diawali dengan 1 bit start, disusul 8 bit data yang dimulai dari bit yang bobotnya paling kecil (bit 0), diakhiri dengan 1 bit stop. Pada AT89S52 yang berfungsi sebagai penerima bit stop adalah RB8 dalam register Serial Control
yang umum dikenal sebagai UART atau Universal Asynchronous Receiver/Trasmitter.
Mode 2 Data dikirim 11 bit, diawali dengan 1 bit start, kemudian 8 bit data. Bit ke-9 yang dapat diatur lebih lanjut dan diakhiri dengan 1 bit stop. Pada AT89S52 yang berfungsi sebagai pengirim bit 9 tersebut berasal dari bit TB8 dalam register SCON. Pada AT89S52 yang berfungsi sebagai penerima bit 9 ditampung pada bit RB8 dalam register SCON, sedangkan bit stop diabaikan dan tidak ditampung. Kecepatan pengiriman data (baudrate) bisa dipilih antara 1/32 atau 1/64 frekuensi kristal yang digunakan. Mode 3 Mode ini sama dengan mode 2, hanya saja kecepatan pengiriman
data (baudrate) bisa diatur sesuai keperluan, seperti halnya pada mode asinkron (mode 1, mode 2, mode 3).
Register kontrol dan status untuk port serial berada dalam SCON seperti diperlihatkan pada Gambar 2-11.
Gambar 2-11 Susunan bit dalam register SCON
Nilai baudrate pada komunikasi serial ditentukan oleh kristal yang digunakan, karena berpengaruh pada jumlah limpahan timer. Perhitungan
1 Limpahan Laju
32 2SMOD
timer
baudrate= × (2-15)
2.5
Pengubah Level TTL ke Level
Serial
Standar komunikasi serial yang banyak digunakan adalah standar RS232 yang dikembangkan oleh Electronic Industry Association and the Telecommunications Industry Association (EIA/TIA) yang pertama kali dipublikasikan pada tahun 1962 [5]. Ini terjadi jauh sebelum IC TTL populer sehingga sinyal ini tidak ada hubungan sama sekali dengan level tegangan IC TTL. Standar ini hanya menyangkut komunikasi data antara komputer DTE dengan alat-alat pelengkap komputer DCE. Standar RS232 inilah yang biasa digunakan pada portserial IBM kompatibel.
Standar sinyal serial RS232 memiliki ketentuan level tegangan sebagai berikut:
1. Logika ‘1’ disebut ‘mark’ terletak antara -3 Volt hingga -25 Volt. 2. Logika ‘0’ disebut ‘space’ terletak antara +3 Volt hingga +25 Volt. 3. Daerah tegangan antara -3 Volt hingga +3 Volt adalah invalid level,
yaitu daerah tegangan yang tidak memiliki level logika pasti sehingga harus dihindari. Demikian juga, level tegangan lebih negatif dari -25 Volt atau lebih positif dari +25 Volt juga harus dihindari karena tegangan tersebut dapat merusak line driver pada saluran RS232.
TTL dan level RS232. Rangkaian pengubah level tegangan TTL menjadi level tegangan RS232 menggunakan rangkaian voltage doubler atau rangkaian pengganda tegangan dan rangkaian voltage inverter atau rangkaian pembalik tegangan.
Gambar 2-12 Level tegangan TTL dan RS232 pada pengiriman huruf ‘A’ tanpa bit paritas.
2.6
Konfigurasi Port Serial
Gambar 2-13 merupakan gambar konektor port serial DB-9 pada bagian belakang CPU [5]. Pada komputer IBM PC kompatibel terdapat konektor serial DB-9 yang dinamai COM1 dan atau COM2. Standar RS232 menyangkut komunikasi data antara komputer (Data Terminal Equipment/DTE) dengan alat-alat pelengkap komputer (Data Circuit-Terminating Equipment/DCE).
Gambar 2-13 dan tabel 2-2 menunjukkan konfigurasi kaki-kaki dan nama sinyal konektor serial DB-9. Keterangan mengenai fungsi saluran RS 232 pada konektor DB-9 adalah sebagai berikut :
• Received Line Signal Detect. Dengan saluran ini DCE memberitahukan ke DTE bahwa pada terminal input ada data masuk.
Gambar 2-13 merupakan gambar konektor portserial DB-9 pada bagian belakang CPU [5].
• Transmit Data, digunakan DTE mengirim data ke DCE.
• Data Terminal Ready, pada saluran ini DTE memberitahukan terminal siap.
• Signal Ground, saluran ground.
• Ring Indikator. Pada saluran ini DCE memberitahukan ke DTE bahwa sebuah stasiun menghendaki hubungan dengannya.
Tabel 2-2 Konfigurasi kaki-kaki DB-9
Nomor Nama Sinyal Direction Keterangan
1 DCD In Data carrier detect/Received Line
2 RxD In Received Data
3 TxD Out Transmit Data
4 DTR Out Data TerminalReady
5 GND - Ground
6 DSR In Data Set Ready
7 RST Out Request to Send
8 CTS In Clear to Send
• Clear To Send. Dengan saluran ini DCE memberitahukan bahwa DTE memulai mengirim data.
• Request To Send. Dengan saluran ini DCE diminta mengirim data oleh DTE.
• DCE Ready. Sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah siap.
Untuk dapat menggunakan port serial perlu diketahui alamatnya. Tersedia dua portserial pada CPU, yaitu COM1 dan COM2. Base address
COM1 adalah 1016 (3F8H0) dan COM2 adalah 760 (2F8h). Alamat tersebut adalah alamat yang biasa digunakan. Tepatnya pada peta memori tempat menyimpan alamat tersebut, yaitu memori 0000 0400H untuk base address COM1 dan memori 0000 0402H untuk baseaddress COM2.
2.7 LCD
HD44780
HD44780 merupakan matriks LCD dengan konfigurasi 16 karakter dan 2 baris. Setiap karakter dibentuk oleh 8x5 atau 10x5 pixel. Gambar 2-14 menunjukkan konfigurasi kaki pada LCD HD44780.
Pin–pin pada LCD HD44780 adalah sebagai berikut:
• Pin 1 (VCC): tegangan +5Volt untuk catu LCD.
• Pin 2 (GND): tegangan 0Volt (ground) modul LCD.
Gambar 2-14. Pin LCD HD44780.
• Pin 4 (RS): Register Select, pin pemilih register yang akan diakses. 1 = akses ke register data
0 = akses ke register perintah
• Pin 5 (R/W): mode baca atau tulis LCD 1 = mode pembacaan
0 = mode penulisan.
• Pin 6 (E): pin untuk mengaktifkan clock LCD.
• Pin 7-14 (D0-D7): jalur bus data.
• Pin 15 (Anoda): tegangan positif backlight modul LCD sekitar 4,5Volt.
• Pin 16 (Katoda): tegangan negatif backlight modul LCD sebesar 0Volt.
2.7.1 DDRAM (Display Data Random Access Memory)
dari LCD. Apabila karakter tersebut ditulis di alamat 40h, maka karakter tersebut akan tampil pada baris kedua kolom pertama dari LCD. Hubungan posisi tampilan dan alamat DDRAM ditunjukkan gambar 2-15.
Gambar 2-15. Hubungan posisi tampilan dan alamat DDRAM.
2.7.2 CGRAM (Character Generator Random Access Memory)
CGRAM adalah memori untuk menggambarkan pola sebuah karakter dan bentuk karakter dapat diubah-ubah sesuai keinginan. Isi memori ini akan hilang saat power supply tidak aktif, sehingga pola karakter akan hilang.
2.7.3 CGROM (Character Generator Read Only Memory)
RANCANGAN PENELITIAN
3.1
Diagram Blok
Gambar 3-1 menunjukkan diagram blok perancangan sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik .
Gambar 3-1. Diagram blok perancangan sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik
Dari gambar 3-1 terlihat bahwa unit pengontrol berbasis mikrokontroler pada sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik (yang ditandai dengan garis putus-putus) menggunakan 2 buah mikrokontroler.
Mikrokontroler I sebagai pengendali sistem dengan mengatur frekuensi tengah pada BPF yang berupa frekuensi fundamental 50Hz beserta frekuensi harmonisanya hingga frekuensi yang ke-31, dengan keluaran berupa frekuensi dan tegangan pada frekuensi tertentu yang akan digunakan sebagai data bagi unit penampil pada sistem penganalisis komponen frekuensi harmonisa arus beban peralatan listrik.
Mikrokontroler II sebagai penghitung Prms dengan masukan
berupa tegangan dan arus yang akan dihitung rmsnya dan diolah agar mendapatkan Prms yang akan ditampilkan pada LCD.
Menggunakan 3 skala amplitudo masukan maksimum yaitu 0,05 Ampere; 0,5 Ampare; 5 Ampere. Amplitudo masukan maksimum yang akan dikendalikan oleh PC dan nantinya akan diteruskan oleh mikrokontroler I ke pemilih skala.
3.2
Perancangan Perangkat Lunak
3.2.1
Kerangka Utama Program Mikrokontroler I
dengan cek koneksi, sebelum pengambilan data dari PC ke mikrokontroler I dimulai. Selanjutnya memproses data dari PC yang berupa pemilihan skala amplitudo masukan dan orde yang nantinya akan diteruskan oleh mikrokontroroler I ke pemilih skala dan BPF. Sebelum diteruskan oleh mikrokontroroler I ke pemilih skala dan BPF, oleh mikrokontroroler I akan melakukan pengecekan dan pengesetan terhadap skala amplitudo masukan dan orde.
.
Gambar 3-2. Diagram alir kerangka utama program mikrokontroler I.
karakter D untuk orde 1, karakter E untuk orde 2, dan karakter F untuk orde 3.
Setelah frekuensi pusat diset oleh mikrokontroroler I maka BPF memproses data. Data dari ADC keluaran BPF yang berupa tegangan diambil oleh mikrokontroroler I dan dikirim ke PC beserta data frekuensi pusat-nya. Mikrokontroroler I akan mengecek apakah pengambilan data sudah sebanyak 31 kali, jika belum program akan kembali melakukan pengesetan terhadap frekuensi pusat dan akan melakukan pengambilan data berikutnya.
a. Ambil Data dari PC
Mulai
Kem bali SBUF => Akum ulator
Acc => @ R0 R I = 1?
R I = 0 T
Y
Acc = 0
R0 = R0 + 1 R3 = 2
R3 = R3 - 1
R3 = 0? Y
T
Gambar 3-3. Diagram alir ambil data dari PC
b. Ambil Data dari ADC
Waktu konversi ADC0804 berdasarkan datasheet sebesar 100µS, dan untuk mengatasi IC ADC0804 yang tidak ideal, digunakan waktu konversi sebesar 114 µS (waktu konversi maksimal IC ADC0804).
Pengambilan data dilakukan dengan memberi logika rendah pada pin WR IC ADC0804 dan menunggu selama 114 µS sebelum data dapat diambil oleh mikrokontroler. Setelah data diambil oleh mikrokontroler, pin
Gambar 3-4. Diagram alir ambil data dari ADC
Gambar 3-5. Diagram alir kirim data ke PC
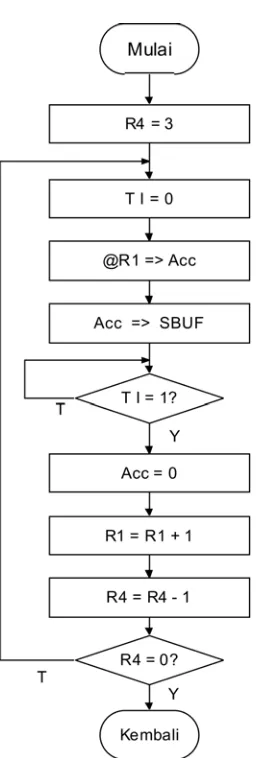
c. Kirim Data ke PC
Untuk pengiriman data ke PC, subrutin akan mengirimkan data berupa kode ASCII 7-bit yang tersimpan dalam akumulator ke port serial
AT89S52. Setelah dilakukan pengesatan terhadap R4 (R4 = 3) karena data heksa yang didapat dari ADC diubah dalam bentuk data desimal sebanyak 3 digit, kemudian TI direset (TI = 0) lalu dilakukan pengiriman data dari mikrikontroler I ke PC. Sebelum Acc direset (Acc=0) akan dilakukan pengecekan data, apakah data telah selesai dikirim. Berikutnya akan dilakukan pengecekan terhadap jumlah data, jika semua digit desimal telah terkirim program akan keluar dari subrutine kirim data ke PC, tetapi jika digit desimal belum semua terkirim, maka akan kembali dilakukan proses pengiriman data ke PC.
3.2.2
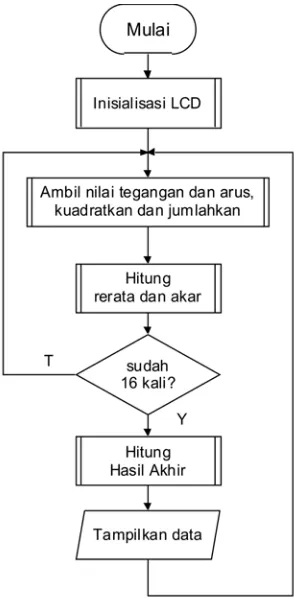
Kerangka Utama Program Mikrokontroler II
Kerangka utama program mikrokontroler I tampak pada gambar 3-6. Secara garis besar, program dimulai dengan inisialisasi LCD. Program kemudian mengambil nilai tegangan dan arus dengan 256 kali pencuplikan dengan kecepatan pengambilan data yang konstan. Nilai tegangan dan arus digunakan untuk mencari nilai root mean square dengan cara menghitung kuadrat nilai-nilai tegangan dan arus, kemudian mencari reratanya dan akhirnya mencari akar kuadrat. Proses mencari nilai root mean square
diolah kembali untuk menghasilkan keluaran berupa Prms yang akan
dikirimkan dan ditampilkan pada LCD. Selanjutnya program kembali melakukan pencuplikan nilai tegangan.
Gambar 3-6. Diagram alir kerangka utama program mikrokontroler I.
a. Inisialisasi LCD
Mulai
10 x Delay 2mS
Akumulator = #38H
Kirim Perintah
Akumulator = #0DH Akumulator = #03H
Akumulator = #08H
Kirim Perintah Kirim Perintah Kirim Perintah
Kembali
Gambar 3-7.
Diagram alir subrutin inisialisasi LCD.
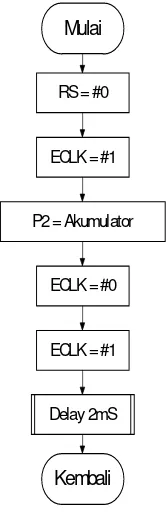
Mulai
P2 = Akumulator
Delay 2mS
Kembali
RS = #0
ECLK = #1
ECLK = #0
ECLK = #1
Gambar 3-8.
Diagram alir subrutin kirim perintah
Data-data yang diperlukan untuk memberi instruksi pada LCD adalah: 1. Pemilihan fungsi : 8bit, 2 baris, dan 5x8 dots (00111000b = 38H) 2. Pemilihan mode kursor (00000011b = 03H)
3. Pemilihan kondisi kursor : ditampilkan, dan berkedip (00001101b = 0DH)
Pada diagram alir subrutin inisialisasi LCD terdapat subrutin kirim perintah. Diagram alir subrutin kirim perintah ditunjukkan pada gambar 3-8. Subrutin inisialisasi LCD digunakan untuk mengatur operasi LCD. Data yang dikirimkan untuk mengatur operasi LCD merupakan data-data instruksi LCD, sehingga pin RS harus mendapat logika rendah. LCD memerlukan waktu untuk menunggu VCC naik mencapai 4,5Volt sebesar 15mS, maka untuk mengatasi LCD yang tidak ideal, digunakan tunda waktu sebesar 20mS. Waktu tunda 20mS dapat menggunakan subrutin delay 2ms yang dipanggil sebanyak 10 kali. Pin R/W tidak perlu diberi logika rendah karena pada perangkat keras sudah dihubungkan ke ground, yang berarti selalu menulis ke LCD. Hal ini bisa dilakukan, karena setelah pengiriman instruksi ke LCD selalu diikuti dengan tunda waktu. Subrutin kirim perintah digunakan untuk memberi logika rendah pada pin RS, mengirim data instruksi ke LCD, dan digunakan untuk membuat perubahan pada masukkan enable clock LCD.
b. Ambil Nilai tegangan dan Arus, Kuadratkan, dan Jumlahkan
mengatasi IC ADC0804 yang tidak ideal, digunakan waktu konversi sebesar 114 µS (waktu konversi maksimal IC ADC0804).
Gambar 3-9. Diagram alir subrutin ambil nilai tegangan dan arus, kuadratkan, dan jumlahkan
Pengambilan data dilakukan dengan memberi logika rendah pada pin
kali. Berdasarkan waktu konversi sebesar 114µS dan waktu tunggu sebelum data dapat diambil oleh mikrokontroler sebesar 114µS, didapatkan laju pencuplikan sebesar 228µS (4385Hz). Dengan frekuensi tegangan masukan maksimum yaitu 1550Hz, maka laju pencuplikan yang digunakan telah memenuhi syarat cukup supaya tegangan masukan bisa didapatkan kembali seutuhnya dari sinyal diskret tercuplik. Dengan kata lain, laju pencuplikan yang digunakan telah memenuhi kriteria Niquist dan telah memenuhi persamaan 2-12.
c. Hitung Rerata dan Akar
Mulai
Kembali Akarkan
Jumlah = Jumlah1(jumlah tegangan)
Nilai akar tegangan
Akarkan Jumlah 256
Jumlah = Jumlah 2 (jumlah arus)
Nilai akar arus
E
E
Jumlah 256
Gambar 3-10. Diagram alir subrutin hitung rerata dan akar.
nilai rerata dari hasil subrutin ambil nilai tegangan dan arus, kuadratkan, dan jumlahkan dan menghitung akar dari nilai rerata tersebut.
Mulai
Set bit 7 data hasil akar Clr bit 7 data hasil akar
Set bit 6 data hasil akar Set bit 7 data hasil akar
Set bit 6 data hasil akar Clr bit 6 data hasil akar
Set bit 5 data hasil akar
Set bit 5 data hasil akar Clr bit 5 data hasil akar
Y T
Y T
Y T
F
Set bit 4 data hasil akar
Y T
Clr bit 4 data hasil akar Set bit 4 data hasil akar rerata2<= (data
hasil akar)2?
rerata2<= (data
hasil akar)2?
rerata2<= (data
hasil akar)2?
rerata2<= (data
hasil akar)2?
Set bit 3 data hasil akar
Y T
Set bit 2 data hasil akar
Y T
F
Clr bit 3 data hasil akar Set bit 3 data hasil akar
Clr bit 2 data hasil akar Set bit 2 data hasil akar
Set bit 1 data hasil akar
Y T
Clr bit 1 data hasil akar Set bit 1 data hasil akar
Set bit 0 data hasil akar
Y T
Clr bit 0 data hasil akar Set bit 0 data hasil akar
Kembali rerata2<= (data
hasil akar)2?
rerata2<= (data
hasil akar)2
?
rerata2<= (data
hasil akar)2?
rerata2<= (data
hasil akar)2?
Setelah nilai MSB dari alamat tempat menyimpan data hasil akar diketahui, kemudian bit 6 dari alamat tempat menyimpan data hasil akar diberi logika tinggi. Data hasil akar dikuadratkan kemudian dibandingkan dengan dengan hasil rerata dari subrutin ambil nilai tegangan dan arus, kuadratkan, dan jumlahkan. Apabila hasil perbandingan menyatakan bahwa hasil rata-rata dari subrutin ambil nilai tegangan dan arus, kuadratkan, dan jumlahkan lebih kecil atau sama besar dengan data hasil akar, maka nilai bit 6 dari alamat tempat menyimpan data hasil akar adalah 0. Apabila hasil perbandingan menyatakan bahwa hasil rata-rata dari subrutin ambil nilai tegangan dan arus, kuadratkan, dan jumlahkan lebih besar, maka nilai bit 6 dari alamat tempat menyimpan data hasil akar adalah 1. Setelah MSB, dan bit 6 dari alamat tempat menyimpan data hasil akar sudah diketahui maka bit 5, bit 4, bit 3, bit 2, bit 1, dan bit 0 dari alamat tempat menyimpan data hasil akar kemudian dicari nilainya dengan cara yang sama.
d. Hitung Hasil Akhir
Diagram alir subrutin hitung hasil akhir berfungsi untuk mencari nilai rerata dari 16 nilai akar Irms dan Vrms yang dihasilkan oleh proses
sebelumnya. Hasil nilai rerata dari Irms dan Vrmsakan dikalikan sehingga
Gambar 3-12. Diagram alir subrutin hitung hasil akhir
Gambar 3-13. Diagram alir subrutin kirim data.
e. Kirim Data
Proses selanjutnya hasil akhir dikirimkan menuju LCD. Pengiriman hasil akhir dilakukan dengan memberi pin RS logika tinggi dan membuat perubahan pada masukan enable clock LCD. Proses pengiriman data dan pengiriman perintah akan berakhir saat seluruh hasil akhir sudah ditampilkan.
3.3
Perancangan Perangkat Keras
3.3.1
Antarmuka Mikrokontroler AT89s52 dengan HD44780
10, 11, 12, 13, 14 dihubungkan dengan pin P2.0, P2.1, P2.2, P2.3, P2.4, P2.5, P2.6, P2.7 pada Mikrokontroler AT89s51. Pin E (enable clock) pada HD44780 dihubungkan dengan pin P0.7 pada Mikrokontroler AT89s52. Pin RS (register select) pada HD44780 dihubungkan dengan pin P0.6 pada mikrokontroler AT89s52. Pin RW dihubungkan dengan ground
supaya HD44780 selalu melakukan proses menulis.
Gambar 3-14. Antarmuka AT89s52 dengan HD44780.
3.3.2
Antarmuka Mikrokontroler AT89s52 dengan ADC
11, 12, 13, 14 dihubungkan dengan pin P2.0, P2.1, P2.2, P2.3, P2.4, P2.5, P2.6, P2.7 pada Mikrokontroler AT89s51.
Pada bab ini akan ditunjukkan hasil pengamatan dan pembahasan dari unit
pengontrol berbasis mikrokontroler pada sistem penganalisis komponen frekuensi
harmonisa pada arus beban peralatan listrik. Pada mikrokontroler I akan dibahas
cek koneksi antara mikrokontroler dengan PC, pemilihan skala arus dan orde
BPF, program mulai, ambil data dari ADC, dan pengesetan frekuensi pusat BPF.
Pada mikrokontroler II akan dibahas data tegangan, arus dan daya.
4.1
Program Mikrokontroler I
Pada pengamatan ini pengecekan koneksi dan data dilakukan
dengan menggunakan program hyperterminal, Port 1 (P1) mikrokontroler
I diberi masukan dari ADC dan masukan manual berupa data bit.
Pengamatan pengesetan frekuensi pusat BPF dilakukan dengan
memberikan LED pada keluaran Port 2 (P2) mikrokontroler I.
4.1.1
Cek Koneksi
Cek koneksi berfungsi sebagai pendukung program untuk
melakukan pengecekan koneksi antara mikrokontroler dengan PC. Pada
pengecekan koneksi ini PC akan mengirimkan karakter X. Jika koneksi
antara mikrokontroler dengan PC sudah terhubung maka mikrokontroler
akan mengirimkan karakter Y ke PC. Jika koneksi belum terhubung,
mikrokontroler akan mengirimkan kembali karakter yang diterima (selain
karakter A, B, C, D, E, F, dan G), pada PC akan muncul kotak dialog yang
memberikan perintah untuk menghubungkan alat. Eksekisi menu cek
koneksi dapat dilihat pada gambar 4-1.
Gambar 4-1. Eksekusi menu cek koneksi
4.1.2
Pemilihan Skala Arus dan Orde BPF
Pada pemilihan skala arus dan orde BPF, PC akan mengirimkan 2
karakter sesuai dengan skala arus dan orde BPF yang dipilih. PC akan
mengirimkan karakter A untuk skala arus 50 mA, karakter A untuk skala
arus 50mA, karakter B untuk skala arus 500 mA, dan karakter C untuk
skala arus 5 A. Sedangkan untuk pemilihan orde BPF, PC akan
mengirimkan karakter D untuk BPF tingkat 1, karakter E untuk BPF
tingkat 2, dan karakter E untuk BPF tingkat 3.
Mikrokontroler akan melakukan pengecekan apakah skala arus dan
mikrokontroler akan melakukan pengesetan untuk perangkat keras pemilih
skala arus dan orde BPF, kemudian bersiap untuk mengeksekusi program
selanjutnya. Mikrokontroler tidak akan mengeksekusi program
selanjutnya, jika hanya skala arus atau orde BPF saja yang dipilih (R0 ≠
02h).
Gambar 4-2. Eksekusi menu pemilihan skala arus dan orde BPF
Pengesetan skala arus dan orde BPF dilakukan dengan memberikan
logika rendah (dengan level tegangan 0 - 0,7Volt) . Skala arus 50 mA akan
aktif saat P0.0 diberi logika 0, skala arus 500 mA akan aktif saat P0.1
diberi logika 0, dan skala arus 5 A akan aktif saat P0.2 diberi logika 0.
Pengesetan orde BPF dilakukan dengan memberikan logika 0 pada P0.3
untuk BPF tingkat 1, P0.4 untuk BPF tingkat 2, dan P0.5 untuk BPF
tingkat 3. Eksekusi menu pemilihan skala arus dan orde BPF dapat dilihat
4.1.3
Program Mulai dan Pengambilan Data dari ADC
Program pengambilan data dari ADC dan pengiriman data ke PC
oleh mikrokontroler akan mulai berjalan saat PC mengirimkan karakter G.
Saat program ini bekerja mikrokontroler akan melakukan pengesetan bit
frekuensi pusat untuk Peak Detector setiap kali akan mengambil data dari
ADC yang nantinya akan dikirimkan ke PC.
Gambar 4-3. Eksekusi menu mulai
Pengambilan data dari ADC terjadi setelah dilakukan pengesetan
terhadap pin WR pada ADC dengan memberikan logika rendah dengan
waktu tunda selama 114 µS. Data dari ADC dapat diterima mikrokontroler
melalui Port 1 (P1). Setelah data diterima maka dilakukan reset terhadap
pin WR pada ADC dengan memberikan logika tinggi dengan waktu tunda
selama 114 µS. Pada mikrokontroler port yang digunakan untuk
Pengesetan bit frekuensi pusat untuk Peak Detector dilakukan
dengan memberikan keluaran berupa data pada Port 2 (P2)
mikrokontroler. Sesudah pengambilan data frekuensi pusat Peak Detector
perlu di-reset dengan memberikan waktu tunda (delay) selama 2,5 second
dan sebelum pengambilan data frekuensi pusat berikutnya Peak Detector
di-set dengan memberikan waktu tunda (delay) selama 2,5 second.
Keluaran set dan reset Peak Detector berada pada P0.7.
Tabel 4-1.
Data pengamatan pengambilan dan pengolahan data bit dari ADC serta data bit masukan manual oleh mikrokontroler I
5,0 1111 1111 255 1111 1111 255
4,5 1110 0101 229 1110 0101 229
4,0 1100 1101 205 1100 1101 205
3,5 1011 0100 180 1011 0100 180
3,0 1001 1010 154 1001 1010 154
2,5 1000 0000 128 1000 0000 128
2,0 0110 0111 103 0110 0111 103
1,5 0100 1101 77 0100 1101 77
1,0 0011 0011 52 0011 0011 52
0,5 0001 1010 26 0001 1010 26
Pengambilan dan Pengolahan Data Bit dari ADC oleh Mikrokontroler I
Pengambilan dan Pengolahan Data Bit Masukan Manual oleh Mikrokontroler I Pengamatan dengan
Memberikan Masukan Manual (data bit)
Hasil Pengolahan Data Tegangan oleh
Mikrokontroler I (Tampilan Pada PC) Level
Tegangan (Volt)
Data Masukan dari ADC ke Mikrokontroler I
(data bit)
Hasil Pengolahan Data Tegangan oleh
Mikrokontroler I (Tampilan Pada PC)
Pada pengamatan ini, Port 1 (P1) mikrokontroler I diberi dua
masukan yang berbeda secara bergantian. Pengamatan pertama Port 1 (P1)
mikrokontroler I memperoleh masukan dari ADC berupa bit-bit digital,
yang sebelumnya diberi masukan berupa tegangan konstan yang diubah
data dari mikrokontroler I. Pengamatan kedua Port 1 (P1) mikrokontroler I
memperoleh masukan berupa data bit yang sama dengan data masukan
ADC ke mikrokontroler I, diperoleh dengan memberikan masukan
manual, level tegangan tinggi (5Volt) untuk data bit 1 dan level tegangan
rendah (0Volt) untuk data bit 0.
Berdasarkan hasil pengamatan pada gambar 4-3 dan tabel 4-1 dapat
diketahui bahwa hasil pengolahan tegangan oleh mikrokontroler I yang
ditampilkan ke PC hasilnya sama jika diberi masukan dengan data bit yang
sama.
4.1.4
Pengesetan Frekuensi Pusat BPF
Pada mikrokontroler I pengesetan frekuensi pusat BPF dilakukan
dengan memberikan keluaran pada Port 2 berupa bit-bit digital melalui
DAC yang nantinya akan menjadi masukan BPF. Pada tabel 4-2 dapat
terlihat bahwa keluaran pada Port 2 merupakan kelipatan 5 dari frekuensi
pusat ke-n. Pengamatan frekuensi pusat ke-13 (650Hz) dapat dilihat pada
gambar 4-4.
Berdasarkan pengamatan pada mikrokontroler I, dapat diketahui
bahwa mikrokontroler I sudah dapat terkoneksi dengan baik ke PC,
mampu mengirim data ke PC dan DAC serta menerima data dari PC dan
ADC .
Tabel 4-2. Data pengamatan pengesetan frekuensi pusat BPF oleh mikrokontroler I
1 5 0000 0101 50 17 85 0101 0101 850
2 10 0000 1010 100 18 90 0101 1010 900
3 15 0000 1111 150 19 95 0101 1111 950
4 20 0001 0100 200 20 100 0110 0100 1.000
5 25 0001 1001 250 21 105 0110 1001 1.050
6 30 0001 1110 300 22 110 0110 1110 1.100
7 35 0010 0011 350 23 115 0111 0011 1.150
8 40 0010 1000 400 24 120 0111 1000 1.200
9 45 0010 1101 450 25 125 0111 1101 1.250
10 50 0011 0010 500 26 130 1000 0010 1.300
11 55 0011 0111 550 27 135 1000 0111 1.350
12 60 0011 1100 600 28 140 1000 1100 1.400
13 65 0100 0001 650 29 145 1001 0001 1.450
14 70 0100 0110 700 30 150 1001 0110 1.500
15 75 0100 1011 750 31 155 1001 1011 1.550
16 80 0101 0000 800
frekuensi
pusat
ke-n
bit-bit digital pada Port 2 Frekuensi pusat yang di-set pada BPF (Hz) dalam desimal dalam biner (hasil pengamatan pada LED) frekuensi pusat ke-n dalam desimal dalam biner (hasil pengamatan pada LED) Frekuensi pusat yang di-setpada BPF (Hz) bit-bit digital pada Port 2
4.2
Analisa Alat dan Program Mikrokontroler II
Pada pengamatan ini instrumen pembanding yang digunakan untuk
menguji alat adalah multimeter SANWA CD 800a untuk nilai tegangan
dan tang ampere CONSTANT AC600 untuk nilai arus.
Hasil suatu pengamatan sudah tentu memiliki nilai yang
menyimpang dari nilai yang ditinjukkan oleh alat pembanding. Pada sub
bab ini, nilai galat untuk menunjukkan penyimpangan atau kesalahan pada
sistem dihitung untuk tampilan data tegangan rms (Vrms), arus rms (Irms),
dan daya rms (Prms). Penyimpangan yang terjadi antara nilai hasil
pengamatan dengan nilai yang ditunjukkan oleh alat pembanding saat
input digital tertentu dapat dihitung dengan menggunakan % galat , yaitu
menggunakan persamaan :
Galat = 100
teori nilai
pengamatan nilai
teori nilai
× % (4-1)
Jika hasil pengamatan dan nilai yang ditunjukkan oleh alat
pembanding dari data tegangan rms (Vrms), arus rms (Irms), dan daya rms
(Prms) yang terdapat pada tabel 4-3 dan dimasukkan ke persamaan di atas,
maka diperoleh grafik hubungan antara nilai yang ditunjukkan oleh alat
pembanding dengan galat.
4.2.1
Analisa Data Tegangan
Analisa data tegangan menggunakan data pada tabel 4-3, dapat
terlihat bahwa alat sudah mampu mengukur tegangan dengan jangkauan
Tabel 4-3 Data kesalahan pengukuran tegangan (Vrms)
1 195 193 2 1,026
2 201 201 0 0,000
3 205 206 1 0,488
4 210 210 0 0,000
5 217 220 3 1,382
6 220 224 4 1,818
7 235 235 0 0,000
8 237 239 2 0,844
9 240 241 1 0,417
∑ 1960 1969 13 5,975
mean 217,78 218,78 1,4444 0,664
Persen Galat (%) No. Vrms Multimeter (Volt) Vrms LCD (Volt) Vrms Galat (Volt)
Grafik kesalahan pengukuran tegangan (Vrms)
0 1 2 3 4 5
195 201 205 210 217 220 235 237 240
Tegangan terukur CONSTANT AC600 (Vrms )
K e sal ah an p e n g u ku ran teg a n g a n al at (V rm s)
Gambar 4-5. Grafik kesalahan pengukuran tegangan (Vrms)
Grafik kesalahan pengukuran tegangan (% )
0,000 0,500 1,000 1,500 2,000
195 201 205 210 217 220 235 237 240
Tegangan terukur CONSTANT AC600 (Vrms )
K e sal ah an p e n g u ku ran te ga ng a n a la t ( % )
Grafik kesalahan pengukuran tegangan alat ditunjukkan pada
gambar 4-5 dan gambar 4-6, dengan kesalahan rata-rata Vrms 1,4444Volt
(0,664%) dan kesalahan maksimum Vrms 4Volt (1.818%). Pada gambar
4-6, persentase kesalahan pengukuran terbesar berada disekitar nilai Vrms
220Volt.
Kesalahan pengukuran tegangan disebabkan oleh:
a. Ketelitian ADC0804 berdasarkan datasheet dibatasi ± 1 LSB, sehingga
kesalahan pengukuran maksimum 0,00196Volt.
b. Pembulatan yang terjadi akibat pemrosesan data secara digital.
4.2.2
Analisa Data Arus
a. Skala Amplitudo Masukan Maksimum 5 Ampere
Analisa data arus menggunakan data pada tabel 4-4, dengan
kesalahan rata-rata Irms 0,05Ampere (4,027%) dan kesalahan maksimum
Irms 0,17Ampere, dapat terlihat bahwa alat sudah mampu mengukur arus
sampai dengan nilai 5,10Vp (amplitudo masukan 5,10Ampere) dengan
tingkat kesalahan kurang dari 42%.
Grafik kesalahan pengukuran arus (% )
0,000 5,000 10,000 15,000 20,000 25,000 30,000 35,000 40,000 45,000
0,170,380,731,0 3
1,291,531,751,942,072,242,392,542,662,782,903,003,073,083,153,253,333,403,47
Arus terukur CONSTANT AC600 (Irms )
K e s a la ha n pe nguk ur a n a rus al a t ( % )
Tabel 4-4 Data kesalahan pengukuran arus (Irms) skala amplitudo masukan
maksimum 5Ampere
1 0,17 0,1 0,07 41,176 0,95 0,95
2 0,38 0,4 0,02 5,263 0,95 0,95
3 0,73 0,7 0,03 4,110 1,55 1,55
4 1,03 1,0 0,03 2,913 2,10 2,10
5 1,29 1,3 0,01 0,775 2,60 2,60
6 1,53 1,6 0,07 4,575 3,00 3,00
7 1,75 1,8 0,05 2,857 3,40 3,40
8 1,94 1,9 0,04 2,062 3,70 3,70
9 2,07 2,1 0,03 1,449 4,00 4,00
10 2,24 2,3 0,06 2,679 4,10 4,10
11 2,39 2,4 0,01 0,418 4,40 4,40
12 2,54 2,6 0,06 2,362 4,60 4,60
13 2,66 2,7 0,04 1,504 4,65 4,65
14 2,78 2,8 0,02 0,719 4,80 4,80
15 2,90 2,9 0,00 0,000 4,90 4,90
16 3,00 3,0 0,00 0,000 5,00 5,00
17 3,07 3,0 0,07 2,280 5,00 5,00
18 3,08 3,0 0,08 2,597 5,00 5,00
19 3,15 3,1 0,05 1,587 5,00 5,00
20 3,25 3,2 0,05 1,538 5,10 5,10
21 3,33 3,2 0,13 3,904 5,20 5,20
22 3,40 3,3 0,10 2,941 5,30 5,30
23 3,47 3,3 0,17 4,899 5,40 5,40
∑ 52,15 51,7 1,19 92,610
mean 2,27 2,25 0,05 4,027
Amplitudo masukan ADC (Ampere) Irms Tang Ampere (Ampere) No. Keluaran Penyearah Presisi (Vp) Persen Galat (%) Irms Galat (Ampere) Irms LCD (Ampere)
Grafik kesalahan pengukuran arus alat ditunjukkan pada gambar
4-7 dan gambar 4-8,% kesalahan pengukuran Irms terbesar berada pada nilai
Irms 0,17Ampere yang dipengaruhi oleh kemampuan program dalam
menghitung arus dan menampilk

![Gambar 2-6. Hasil pencuplikan xs( )t.[3]](https://thumb-ap.123doks.com/thumbv2/123dok/1634349.2067031/32.612.257.421.106.192/gambar-hasil-pencuplikan-xs-t.webp)