DAFTAR PUSTAKA
[1] Theraja, B.L. & Theraja, A.K, “A Text Book of Electrical Technology”, New Delhi, S.Chand and Company Ltd., 2001.
[2] Theodore, Wildi,”Electrical Machine Drives and Power Systems “, Prentice Hall Internasional, Liverpool, 1983.
[3] Bimbra,P.S,”Generalized Circuit Theory of Electrical Machines”, Khanna Publisher, India, 1975.
[4] Wijaya, Mochtar,”Dasar-Dasar Mesin Listrik”, Djambatan, Jakarta, 2001. [5] Sumanto, DRS, ”Mesin Sinkron”, Edisi Kedua, Penerbit Andi Offset,
Yogyakarta, 1996.
[6] Fitgerald A.E. JR. Charles & Kusko Alexander, “Electric Macinery”, Third Edition, McGraw-Hill, TokyoJapan,1971.
[7] Slemon G.R. & Straughen A.,”Electric Machines”, Addison-Wesley, United States, 1982.
[8] Sitepu, Hendra Abdika, “Analisis Regulasi Tegangan Generator Sinkron Kutub Menonjol dengan menggunakan Teori Dua Reaksi ”, Medan, 2006. [9] Sebayang, Fahdi Ruamta, “Analisa Penentuan Tegangan Terminal
Generator Sinkron 3 Fasa Dan Perbaikan Faktor Daya Beban Menggunakan Metode Potier”, Medan 2013
tegangan Generator Sinkron Dengan Pembeban Resistif Induktif Dan Kapasitif”, Medan 2013
BAB III
METODELOGI PENELITIAN
3.1 Tempat dan Waktu Penelitian
Pengambilan data dilakukan di Laboratorium Konversi Energi Listrik Departemant Teknik Elektro USU pada tanggal 2 juni 2015 pukul 10:00 - selesai. 3.2 Metode Pengumpulan Data
1. Metode Observasi
Pengumpulan data dengan pengamatan langsung adalah cara pengambilan data ke tempat penelitian dan melihat langsung aktivitas pengambilan data. Dengan cara ini akan didapat langsung mengenai hal-hal yang harus dicatat sebagai parameter data dalam penelitian.
2. Metode Dokumentasi
Memperoleh data melalui hal-hal atau variable dan parameter yang berupa catatan, naskah dan lain-lain. Adapun dokumentasi yang digunakan adalah data-data yang berhubungan dengan penentuan tegangan serta variabel dan parameter yang dapat mempengaruhi tegangan keluaran.
3.3 Langkah – Langkah Penelitian
Langkah-langkah penelitian yang diambil dalam penelitian pengaturan kecepatan ini meliputi :
Sebelum dilakukan pengambilan data atau dimulainya percobaan mempersiapan penelitian agar berjalan lancar. hal ini di lakukan untuk mengkoordinasi agar didapat hasil sesuai yang diinginkan. Langkah-langkah yang dilakukan sebagai berikut :
a) Mempersiapkan alat-alat dan bahan sesuai dengan penelitian. alat-alat dan bahan yang digunakan harus dipersiapkan terlebih dahulu untuk berlangsungnya penelitian.
b) Mengkondisikan obyek penelitian.
Obyek penelitian adalah Generator Sinkron 3 Fasa. Yaitu memastikan apakah Generator sinkron dapat beroperasi dengan baik. Memeriksa Power Supply dan Peralatan apakah sudah disetting dan diatur dengan benar.
c) Mengkondisikan alat ukur.
Alat ukur harus memiliki validitas yang tinggi. untuk mendapatkan validitas yang baik alat ukur harus disetting sesuai kebutuhan keadaan skala operasi.
2. Tahap Pengambilan Data
3.4 Peralatan Yang Digunakan
Peralatan yang digunakan dalam menganalisis perbandingan penentuan regulasi tegangan generator sinkron 3 fasa dengan menggunakan metode potier dan new asa adalah sebagai berikut :
1. 1 unit Generator Sinkron 3 Fasa • Tegangan : 220 V
• Hubungan belitan jangkar : Delta • Arus nominal jangkar : 7 Amper • Daya generator : 2,67 kW • Putaran nominal : 1500 rpm • Faktor daya : 0,8 Laging • Kelas isolasi : B
2. Motor arus searah penguatan bebas • Tegangan : 220 V
• Arus jangkar : 22,7 Amper • Daya : 5 kW
• Tegangan medan : 220 V • Arus medan : 0,17 Amper • Kelas isolasi : F
3. 3 PTDC 4. Beban-beban
• Beban resistif (tahanan variabel dan tahanan geser).
• Kapasitor sebagai beban untuk memperbaiki faktor daya yang besarnya
5. Alat-alat ukur • Cos ϕ meter
• Volt meter AC dan DC • Amper meter AC dan DC • Watt meter
• Torsi meter • Tacho meter
3.5 Rangkaian Pengambilan Data Dan Prosedur Pengambilan Data 3.5.1 Percobaan Pengukuran Tahanan Jangkar
3.5.1.1 Rangkaian Percobaan
Gambar 3.1 Rangkaian percobaan Pengukuran Tahanan Jangkar.
3.5.1.2 Prosedur Percobaan 1. Rangkai Gambar Percobaan di atas.
2. Rangkaian belitan stator dihubungkan dengan suplai tegangan DC 3. Tegangan DC suplai dinaikkan sampai pada nilai tertentu.
4. Ketika tegangan menunjukkan pada besaran 6,2 Volt, penunjukan alat ukur voltmeter dan amperemeter dicatat.
3.5.2 Percobaan Beban Nol 3.5.2.1 Rangkaian Percobaan
Rangkaian percobaan beban nol yang digunakan seperti gambar 3.2 berikut :
Gambar 3.2 Rangkaian percobaan Beban Nol 3.5.2.2 Prosedur Percobaan
1. Alat-alat dirangkai seperti gambar 4.2, PTDC pada posisi minimum. 2. Tutup S2 dan atur arus penguat motor dengan mengatur PTDC2 3. Tutup S1 dan atur tegangan motor (V1) dengan mengatur PTDC1
4. Catat tegangan terminal saat arus penguat generator belum dinaikkan (If = 0 )
5. Tutup S3 dan naikkan arus penguat generator secara bertahap dengan mengatur PTDC3 Dimana, putaran dijaga konstan pada setiap kenaikkan arus penguat generator, kemudian catat tegangan terminal.
6. Turunkan arus penguat generator (PTDC3 minimum) lalu buka S3. Minimumkan PTDC1 dan PTDC2 hingga nol, lalu buka S1 dan S2
3.5.3 Percobaan Hubung Singkat 3.5.3.1 Rangkaian Percobaan
Gambar 3.3 Rangkaian percobaan hubung singkat 3.5.3.2 Prosedur Percobaan
1. Alat-alat dirangkai seperti gambar 3.3, PTDC pada posisi minimum. 2. Tutup S2 dan atur arus medan motor dengan mengatur PTDC2
3. Tutup S dan atur tegangan motor (V1) dengan mengatur PTDC1 diperoleh harga nominal
4. Tutup S3 dan naikkan arus penguat generator (If) secara bertahap dengan
mengatur PTDC3
5. Catat arus hubung singkat generator (Ia) untuk setiap tahapan arus medan generator (IF) dengan putaran generator dijaga konstan
6. Turunkan arus medan generator (I ). f) hingga nol, lalu buka S3. Minimumkan PTDC1 dan PTDC2 hingga nol, lalu buka S1 dan S2
3.5.4 Percobaan Berbeban
3.5.4.1 Rangkaian Percobaan
Gambar 3.4 Rangkaian Percobaan Berbeban 3.5.4.2 Prosedur Percobaan
1. Rangkaian dirangkai seperti Gambar 4.7 di atas. Semua saklar dalam keadaan terbuka dan PTDC dalam keadaan minimum.
2. Saklar S1, S2 ditutup dan PTDC 1 dan PTDC 2 diatur untuk memberikan tegangan ke terminal jangkar dan arus medan motor sampai dicapai putaran nominal generator.
3. Saklar S3 ditutup dan PTDC 3 diatur sampai arus medan yang terbaca pada A3 sebesar 100 mA
4. Beban resistif dipasang dengan menutup saklar S. Beban dinaikkan secara bertahap dengan menjaga If dan putaran konstan
5. Atur A4 hingga menunjukan harga arus Ia yaitu 1,6 A , dicatat nilai yang terbaca pada alat, cos φ meter, V2. V2 adalah besar tegangan terminal
generator
BAB IV
HASIL DAN PEMBAHASAN
4.1 Umum
Generator sinkron memerlukan suplai tegangan (eksitasi) pada kumparan medan untuk pembangkit medan yang akan menjadi energi listrik. Energi listrik digunakan pada peralatan-peralatan listrik dan elektronik. Karena penggunaannya yang cukup luas maka diperlukan penentuan tegangan yang efisien dan sesuai agar tidak merusak peralatan serta perlu dilakukan pengujian pada generator terhadap perbaikan faktor daya, regulasi, dan efisiensi.
Untuk dapat melihat bagaimana pengaruh perubahan beban terhadap regulasi tegangan generator sinkron tiga fasa maka diperlukan beberapa percobaan yaitu:
1. Percobaan beban nol 2. Percobaan hubung singkat 3. Percobaan perkiraan faktor daya 4. Percobaan Zpf(Zero power factor) 5. percobaan berbeban
Parameter generator sinkron yang diperlukan adalah X
s dan Zs yang diperoleh dari
percobaan beban nol dan hubung singkat, tahanan jangkar R
a tidak diabaikan.
4.2 Hasil Penelitian
4.2.1 Data Pengujian
Tabel 4.1 Data percobaan pengukuran tahanan jangkar
Vdc Idc
6 2,26
Tabel 4.2 Data percobaan beban nol
Putaran : 1500 rpm
No If ( mA ) V ( Volt )
1 0 13
2 10 24
3 20 35
4 30 46
5 40 56
6 50 72
7 60 88
8 70 101
9 80 112
10 90 125
11 100 136
13 120 162
14 130 172
15 140 180
16 150 191
17 160 200
18 170 206
19 180 211
20 190 216
21 200 220
22 210 234
23 220 243
24 230 248
25 240 251
26 250 254
27 260 258
28 270 251
29 280 265
30 290 270
31 300 276
Tabel 4.3 Data percobaan hubung singkat
Putaran : 1500 rpm
1 0 0,61
2 10 0,88
3 20 1,3
4 30 1,72
5 40 2,01
6 50 2,26
7 60 2,62
8 70 3,13
9 80 3,54
10 90 3,87
11 100 4,12
12 110 4,45
13 120 4,83
14 130 5,02
15 140 5,34
16 150 5,82
17 160 6,12
18 170 6,37
19 180 6,62
20 190 6,91
21 200 7,01
Data Percobaan berbeban
Pout = Vt x Ia x cos φ
If = 0,6 A
Putaran = 1500 rpm
Ia1 ( A) Vt1 ( Volt ) Pout (watt) Torsi ( Gram ) Cosφ1
1,2 164 284,5 150 0,74
1,4 152 292,4 150 0,76
1,6 138 302,8 150 0,74
Tabel 4.5 Data percobaan setelah perbaikan faktor daya Vt1
( Volt )
Ia1 ( A )
Kapasitor ( μF )
Ia2
( A )
Vt2
( Volt )
Pout ( Watt )
Torsi ( gram )
Cos φ2
164 1,2
2 0,98 172 260,5 150 0,82
4 0,91 180 268,4 150 0,93
152 1,4
2 1,15 161 312,0 150 0,84
4 1,02 168 322,6 150 0,95
138 1,6
2 1,37 142 343,8 150 0,85
4 1,3 149 362,2 150 0,98
4.3 Analisis Data Pengujian
1. Pengujian menentukan tahanan generator sinkron
=
Dikarenakan tahanan jangkar akan beroprasi pada tegangan AC maka harus dikalikan faktor koreksi yang harganya 1,1 s/d 1,5
RAC = 1,2 x 3,98
= 4,776 Ω
Dengan persamaan tabel diatas maka diperoleh table hasil analisa pengujian tahanan pada tabel 4.6
Tabel 4.6 Hasil Analisa data percobaan tahanan jangkar
Vdc ( V ) Idc ( A ) RDC ( Ohm ) RAC ( Ohm )
6 2,26 3,98 4,776
2. Penentuan Parameter Generator Sinkron
Tabel 4.7 Perbandingan data beban nol dan data hubung singkat
No OCC SCC
1 If ( mA ) V φ ( V ) If ( mA ) Ia ( A ) 2
0 13 0 0,61
3
10 24 10 0,88
4
20 35 20 1,3
5
30 46 30 1,72
6
40 56 40 2,01
7
50 72 50 2,26
8
60 88 60 2,62
9
70 101 70 3,13
10
80 112 80 3,54
11
90 125 90 3,87
12
13
110 148 110 4,45
14
120 162 120 4,83
Dari tabel diatas, maka diambil salah satu niaai arus penguatan ( If ) yaitu 100 mA Dimana, ketika If = 100 mA
Vφ = 136 → dari karekteristik beban nol ( OCC ) Ia = 4,12 → dari karekteristik hubung singkat ( SCC )
Maka diperoleh Zs =
=
= 33,01 ΩXs = Xs =
Xs = 32,66
3. Penentuan Nilai Kapasitor Perbaikan Faktor Daya.
Faktor daya yang diinginkan adalah 0,8 dan 0,9 untuk setiap nilai arus beban yang digunakan sebagai objek pengambilan data.
- Target cos φ 0,8 ; φ = 36,870 dari cos φ 0,74 ; φ = 42,270 ∆Q = P Tan ( φ1–φ2 ) VAR
= 284,5 Tan ( 42,270– 36,870) VAR = 26,89 VAR
∆Cperfasa = = μF
∆Cperfasa = = 1,11 μF
∆Q = P Tan ( φ1–φ2 ) VAR
= 284,5 Tan ( 42,270– 25,840) VAR = 83,89 VAR
∆Cperfasa = = μF
∆Cperfasa = = 3,31 μF
Dari hasil perhitungan tersebut maka dipakailah kapasitor dengan nilai 2 μF dan 4 μF untuk setiap beban yang telah ditentukan.
4. Penentuan tegangan dan regulasi tegangan - Regulasi
- Ia = 1,2 A
Sebelum perbaikan faktor daya, Cos φ = 0,74
Ef =
Ef =
= 193,78 VR
=
=
= 18,16 %
Setelah Perbaikan faktor daya, cos φ = 0,82
Ef =
Ef =
VR
=
=
= 13,55%
Setelah perbaikan faktor daya , Cos φ = 0.93
Ef =
Ef =
= 196,04 VR
=
=
= 8,91 % - Ia = 1,4 A
Sebelum perbaikan faktor daya, Cos φ = 0,76
Ef =
Ef =
= 188,11 VR
=
=
= 23,76 %
Setelah Perbaikan faktor daya, cos φ = 0,84
Ef =
Ef =
VR
=
=
= 16,70 %
Setelah perbaikan faktor daya , Cos φ = 0.95
Ef =
Ef =
= 186,17 VR
=
=
= 10,81 %
- Ia = 1,6 A
Sebelum perbaikan faktor daya, Cos φ = 0,74
Ef =
Ef =
= 181,63 VR
=
=
= 31,61 %
Setelah Perbaikan faktor daya, cos φ = 0,85
Ef =
= 174,91 VR
=
=
= 23,18 %
Setelah perbaikan faktor daya , Cos φ = 0.98
Ef =
Ef =
= 168,38 VR
=
=
= 13,01 %
- Efisiensi - Ia = 1,2 A
Sebelum perbaikan faktor daya Cos φ = 0,74 , Pout = 284,5 watt
Pscl = 3 x Ia2 x Ra
= 3 x 1,22 x 4,776 = 20,63 Watt
η =
η =
= 93,23 %
Setalah perbaikan faktor daya Cos φ = 0,82 , Pout = 260,5 Watt
Pscl = 3 x Ia2 x Ra
= 3 x 0,982 x 4,776 = 13,76 Watt
η =
η =
=
= 94,9 %
Setalah perbaikan faktor daya Cos φ = 0,93 , Pout = 268,4 Watt
Pscl = 3 x Ia2 x Ra
= 3 x 0,912 x 4,776 = 11,86 Watt
η =
η =
=
= 95,76 %
Sebelum perbaikan faktor daya Cos φ = 0,76 , Pout = 292,4 watt Pscl = 3 x Ia2 x Ra
= 3 x 1,42 x 4,776 = 28,08 Watt
η =
η =
=
= 91,24 %
Setalah perbaikan faktor daya Cos φ = 0,84 , Pout = 312,0 Watt
Pscl = 3 x Ia2 x Ra
= 3 x 1,152 x 4,776 = 18,95 Watt
η =
η =
=
= 94,42 %
Setalah perbaikan faktor daya Cos φ = 0,95 , Pout = 322,6 Watt
= 3 x 1,02 2 x 4,776 = 14,91 Watt
η =
η =
=
= 95,58 %
- Ia = 1,6 A
Sebelum perbaikan faktor daya Cos φ = 0,74 , Pout = 302,8 watt
Pscl = 3 x Ia2 x Ra
= 3 x 1,62 x 4,776 = 36,67 Watt
η =
η =
=
= 89,19 %
Setalah perbaikan faktor daya Cos φ = 0,85 , Pout = 343,8 Watt
Pscl = 3 x Ia2 x Ra
η =
η =
=
= 92,75 %
Setalah perbaikan faktor daya Cos φ = 0,98 , Pout = 362,2 Watt
Pscl = 3 x Ia2 x Ra
= 3 x 1,3 2 x 4,776 = 24,41 Watt
η =
η =
=
= 93,68 %
Dari hasil analisa data diatas, berikut adalah tabel hasil analisa percobaan berbeban untuk menentukan Ef, VR , η pada tabel
Tabel 4.8 Hasil analisa data percobaan berbeban
Ia (A )
Sebelum Perbaikan Faktor Daya Sesudah Perbaiakan Faktor Daya
Cos φ1
Ef (V) VR (%) η (%) Pscl Cos φ1 Ef ( V )
VR (%)
η
(%)
Pscl
1,2 0,74 193,78 18,16 93,23 20,63
1,4 0,76 188,11 23,76 91,24 28,08
0,84 187,89 16,70 94,42 18,95 0,95 186,17 10,81 95,58 14,91
1,6 0,74 181,63 31,61 89,19 36,67
0,85 174,91 23,18 92,75 26,89 0,98 168,38 13,01 93,68 24,41
5. Regulasi Tegangan Dengan Metode Segita Potier Tabel 4.9 Data Percobaan Berbeban
Ia = 4,83 A n = 1500 Rpm Vnominal = 220 V
NO Cos φ VΦ
1 1 204
2 0,7 Lagging 186
3 0,9 Leading 227
Dari kurva OCC dan kurva Zpf yang telah diketahui, maka kurva segitiga potier telah dapat digambarkan dengan mengikuti langkah – langkah yang telah disebutkan pada bab sebelumnya.
Dari SCC maka diperoleh OB = 0,12 A Dari data Zpf diperoleh A = 0, 34 A AD = OB
IG = OH dengan sudut
- 180 –(90 + ϴ ) ( untuk beban lagging )
- 180 – (90 - ϴ ) (untuk beban leading)
Dari data – data yang didapat maka diperoleh kurva potier seperti berikut :
Gambar 4.1 Kurva Potier OG = 0,24 A
IG = 0,02 A
a. Beban resistif, Cos φ = 1
If = =
= 0,24 A
Dari karakteristik OCC untuk mendapatkan E0 dengan If 0,24 A ilah E0 = 251 A
=
= 23,03 %
b. Beban Induktif, Cos φ = 0,7 Lagging , φ = 45,57
If = =
= 0,25 A
Dari karakteristik OCC untuk mendapatkan E0 dengan If 0,25 A ilah E0 = 254 A
VR =
=
= 36,55 %
c. Beban Kapasitif, Cos φ = 0,9 Leading , φ = 25,84
If = = = 0,23A
Dari karakteristik OCC untuk mendapatkan E0 dengan If 0,23 A ialah E0 = 248 A
VR =
=
Regulasi Tegangan Dengan Metode New Asa Tabel 4.10 Data Percobaan Berbeban
Ia = 4,83 A n = 1500 Rpm Vnominal = 220 V
NO Cos φ VΦ
1 1 204
2 0,7 Lagging 186
3 0,9 Leading 227
If1 = 0,15 A
If2 = 0,2 A
a. Beban resistif, Cos φ = 1
If =
=
= 0,25 A
Dari karakteristik OCC untuk mendapatkan E0 dengan If 0,25 A ialah E0 = 254 A
VR =
=
b. Beban Induktif, Cos φ = 0,7 Lagging , φ = 45,57
If =
=
= 0,288 A
Dari karekteristik OCC untuk mendapatkan E
0 dengan If 0,288 A dapat
menggunakan metode interpolasi dengan :
If = 0,28 A diperoleh V = 265 Volt If = 0,29 A diperoleh V = 270 volt If = 0,288
= 265 + x ( 270 – 265 ) = 269
VR =
=
= 44,69 %
c. Beban Kapasitif, Cos φ = 0,9 Leading , φ = 25,84
If =
=
Dari karakteristik OCC untuk mendapatkan E0 dengan If 0,21 A ialah E0 = 234 A
VR =
=
= 3,08 %
4.4 Grafik Pengujian 4.4.1 Kurva Beban Nol
[image:31.595.112.564.354.578.2]Berikut adalah grafik yang menunjukkan hubungan pengaruh arus medan terhadap tegangan beban nol ditunjukkan pada gambar 4.2
4.4.2 Kurva Hubung Singkat
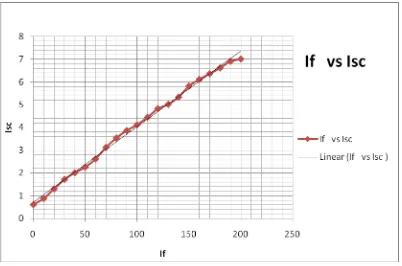
[image:32.595.114.516.221.487.2]Berikut adalah grafik yang menunjukkan hubungan pengaruh arus medan terhadap hubung singkat ditunjukkan pada gambar 4.3
Gambar 4.3 Grafik If Vs Isc
4.4.3 Percobaan Berbeban
Berikut adalah grafik yang menunjukkan hubungan pengaruh Ia terhadap Ef ditunjukkan pada gambar 4.4
Gambar 4.4 Grafik Ia Vs Ef
Diperoleh semakin bertambah arus beban (Ia) tegangan induksi (Ea) akan
semakin kecil dan tegangan terminal (Vt) juga akan semakin kecil. Semakin baik
faktor daya untuk arus beban (Ia) yang sama maka tegangan induksi akan semakin
kecil sedangkan tegangan terminal akan semakin besar. 4.4.4 Kurva perbaikan regulasi tegangan
Gambar 4.5 Grafik Ia Vs VR
Diperoleh semakin bertambahnya beban persentasi tegangan regulasi akan semakin besar (berkurang). Sedangkan semakin baik faktor daya untuk beban yang sama persentasi regulasi tegangan akan semakin kecil (semakin lebih baik).
4.4.5 Kurva perbaikan Efisiensi
[image:34.595.114.510.301.531.2]Grafik yang menunjukkan hubungan pengaruh Ia terhadap efisiensi ditunjukkan oleh gambar 4.6
Gambar 4.6 Grafik Ia vs efisiensi
BAB V
PENUTUP
5.1 Kesimpulan
Berdasarkan hasil pengujian dan analisis perhitungan yang dilakukan penulis mengambil kesimpulan sebagai berikut :
1. Untuk merubah tegangan terminal agar tetap konstan dapat dilakukan dengan pengaturan tegangan induksi (Ea) yang diakibatkan adanya
perubahan arus beban (Ia) yang mengalir pada tahanan jangkar (Ra) dan
reaktansi sinkron (Xs) sehingga terjadi perubahan tegangan terminal.
2. Dengan nilai pembebanan yang sama, maka semakin baik faktor daya dari beban yang dilayani oleh generator sinkron 3 fasa maka semakin baik regulasi yang dihasilkan. Hal ini disebabkan semakin baik faktor dayanya maka tegangan beban nol (Ef) yang dihasilkan akan semakin kecil
sedangkan tegangan yang diterima oleh beban (Vt) akan semakin besar..
3. Semakin baik faktor daya efisiensi akan semakin baik sedangkan rugi-rugi (Pcl) dan arus jangkar (Ia) akan semakin kecil.
4. Dari metode potier dan New Asa yang digunakan, diperoleh regulasi tegangan
dengan arus beban sebesar 4,83 A, pada beban induktif adalah lebih positif
dari pada beban resistif, dan kapasitif yaitu :
- Metode Potier - Metode New Asa
Induktif : 36,55 % Induktif : 44,69 %
Kapasitif : 9,25 % Kapasitif : 3,08 %
Regulasi dengan menggunakan metode New Asa untuk beban resistif dan induktif lebih positif dari pada regulasi dengan metode potier hal ini disebabkan karena pada beban induktif semakin besar arus beban yang diberikan maka semakin
besar pula jatuh tegangan terminal Vt, begitu juga pada beban resistif namun jatuh
tegangannya tidak sebesar pada beban induktif., untuk beban kapasitif metode New
Asa memiliki nilai yang paling kecil dari metode potier dimana kenaikan pada arus beban mengakibatkan kenaikan tegangan terminal Vt, hal ini dikarenakan sifat dari
beban kapasitif yang seolah – olah menambah tegangan pada terminal generator,
namun kedua metode ini merupakan metode yang paling akurat dari semua metode yang ada.
5.2 Saran
Adapun beberapa saran yang bisa diberikan dari hasil tugas akhir ini adalah:
1. Perlu dilakukan pengujian untuk berbagai beban dan pengaruhnya terhadap regulasi dan efisiensi.
BAB II
GENERATOR SINKRON 3 FASA
2.1 Umum
Genetaror sinkron merupakan pembangkit listrik yang banyak digunakan. Oleh sebab itu generator sinkron memegang peranan penting dalam sebuah pusat pembangkit listrik. Mesin Sinkron dapat bekerja sebagai generator apabila kumparan jangkarnya (stator) menghasilkan daya arus bolak-balik. Generator sinkron (alternator) merupakan sebuah mesin sinkron yang berfungsi mengubah energi mekanik berupa putaran menjadi energi listrik bolak-balik.
2.2 Konstruksi Generator Sinkron
Pada dasarnya konstruksi generator sinkron sama dengan motor sinkron. Secara umum, konstruksi generator sinkron terdiri dari stator (bagian yang diam) dan rotor (bagian yang bergerak). Keduanya merupakan rangkaian magnetik yang berbentuk simetris dan silindris yang berkaitan. Selain itu generator sinkron memiliki celah udara ruang antara stator dan rotor yang berfungsi sebagai tempat berputarnya rotor dan tempat terjadinya fluksi atau induksi energi listrik dari rotor ke stator.
Pada Gambar 2.1 dapat dilihat konstruksi dari sebuah generator sinkron secara umum :
Gambar 2.1 Konstruksi generator sinkron secara umum
A. Rotor
1.) Rotor yang berbentuk kutub sepatu (salient pole)
2.) Rotor yang berbentuk kutub dengan celah udara sama rata (cylindrical)
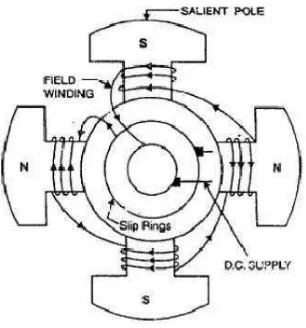
1. Rotor kutub menonjol (Salient Pole Rotor)
Rotor tipe ini mempunyai kutub yang jumlahnya banyak. Kumparan dibelitkan pada tangkai kutub, dimana kutub-kutub diberi laminasi untuk mengurangi panas yang ditimbulkan oleh rugi-rugi arus Eddy, kumparan-kumparan medannya terdiri dari bilah tembaga persegi. Kutub menonjol ditandai dengan rotor berdiameter besar dan panjang serta sumbunya pendek.
[image:39.595.254.407.490.654.2]Selain itu jenis kutub salient pole, kutub magnetnya menonjol keluar dari permukaan rotor. Belitan-belitan medan dihubung seri. Ketika belitan medan ini disuplai oleh eksiter, maka kutub yang berdekatan akan membentuk kutub yang berlawanan. Bentuk kutub menonjol generator sinkron tampak seperti Gambar 2.2 berikut :
Rotor kutub menonjol umumnya digunakan pada generator sinkron dengan kecepatan putaran rendah dan sedang (120-400 rpm). Generator sinkron tipe seperti ini biasanya dikopel oleh mesin diesel atau turbin air pada sistem pembangkit listrik. Rotor kutub menonjol baik digunakan untuk putaran rendah dan sedang karena :
a. Konstruksi kutub menonjol tidak terlalu kuat untuk menahan tekanan mekanis apabila diputar dengan kecepatan tinggi.
b. Kutub menonjol akan mengalami rugi-rugi yang besar dan bersuara bising jika diputar dengan kecepatan tinggi.
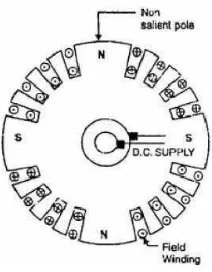
2. Rotor kutub tak menonjol dengan celah udara sama rata (Rotor Silinder) Rotor tipe ini dibuat dari plat baja berbentuk silinder yang mempunyai sejumlah slot sebagai tempat kumparan. Karena adanya slot-slot dan juga kumparan medan yang terletak pada rotor maka jumlah kutub pun sedikit yang dapat dibuat. Belitan-belitan medan dipasang pada alur-alur di sisi luarnya dan terhubung seri yang dienerjais oleh eksiter. Rotor yang umumnya berdiameter kecil dengan sumbu yang panjang. Dengan begitu kontruksi rotor ini memberikan keseimbangan mekanis yang lebih baik karena rugi-rugi anginya lebih kecil. Gambar bentuk kutub silinder generator sinkron tampak seperti pada Gambar 2.3
Gambar 2.3 Rotor Kutub tak Menonjol Generator Sinkron
Beberapa komponen utama rotor yaitu : a. Slip Ring
Slip ring merupakan cincin logam yang melingkari poros rotor tetapi dipisahkan oleh isolasi tertentu. Dibuat dari bahan kuningan atau tembaga yang dipasang pada poros dengan memakai bahan isolasi. Terminal kumparan rotor dipasangkan ke-slip ring ini kemudian dihubungkan kesumber arus searah melalui sikat (brush) yang letaknya menempel pada slip ring.
b. Sikat
Sebagaian dari generator sinkron ada yang memiliki sikat ada juga yang tidak memiliki sikat. Sikat pada generator sinkron berfungsi sebagai saklar putar untuk mengalirkan arus DC ke-kumparan medan pada rotor generator sikron. Sikat terbuat dari bahan karbon tertentu.
c. Kumpara rotor (kumparan medan)
d. Poros Rotor
Poros rotor merupakan tempat meletakkan kumparan medan, dimana pada poros tersebut telah terbentuk slot-slot secara paralel terhadap poros rotor.
B. Stator
Stator ialah bagian generator yang diam dan berfungsi sebagai tempat untuk menerima induksi magnet dari rotor. Arus bolak-balik (AC) yang menuju ke beban disalurkan melalui armatur, komponen ini berbentuk sebuah rangka silinder dengan lilitan kawat konduktor yang sangat banyak. Armatur selalu diam (tidak bergerak). Oleh karena itu, komponen ini juga disebut dengan stator. Lilitan armatur generator dalam wye dan titik netral dihubungkan ke tanah. Lilitan dalam wye dipilih karena:
1. Meningkatkan daya output.
2. Menghindari dan meminimalisir tegangan harmonik, sehingga tegangan line tetap sinusoidal dalam kondisi beban apapun.
Gambar 2.4 Inti dalam Stator dan Alur Pada Stator
Stator terdiri dari beberapa komponen utama, yaitu: a. Rangka stator
Rangka stator merupakan rumah (kerangka) yang menyangga inti jangkar generator.
b. Inti Stator
Inti stator terbuat dari laminasi-laminasi baja campuran atau besi magnetic khusus terpasang ke rangka stator.
c. Alur (slot) dan Gigi
Alur dan gigi merupakan tempat meletakkan kumparan stator. Ada 3 (tiga) bentuk alur stator yaitu terbuka, setengah terbuka, dan tertutup seperti pada gambar 2.5 berikut :
d. Kumparan Stator (Kumparan Jangkar)
Kumparan jangkar biasanya terbuat dari tembaga. Kumparan ini merupakan tempat timbulnya ggl induksi. [5]
2.3 Prinsip Kerja Generator Sinkron
Adapun prinsip kerja dari suatu generator sinkron adalah:
1. Kumparan medan yang terdapat pada rotor dihubungkan dengan sumber eksitasi tertentu yang akan mensuplai arus searah terhadap kumparan medan. Dengan adanya arus searah yang mengalir melalui kumparan medan maka akan menimbulkan fluksi yang besarnya terhadap waktu adalah tetap.
2. Unit penggerak mula (Prime Mover) yang sudah terkopel dengan rotor segera dioperasikan sehingga memutar rotor pada kecepatan nominalnya
persamaan (2.1) dimana : …………(2.1)
n = Kecepatan putar rotor (rpm) p = Jumlah kutub rotor
f = frekuensi (Hz)
3. Perputaran rotor tersebut sekaligus akan memutar medan magnet yang dihasilkan oleh kumparan medan. Medan putar yang dihasilkan pada rotor, akan diinduksikan pada kumparan jangkar sehingga pada kumparan jangkar yang terletak di stator akan dihasilkan fluks magnetik yang
melingkupi suatu kumparan akan menimbulkan ggl induksi pada ujung-ujung kumparan tersebut, hal tersebut sesuai dengan persamaan berikut
dimana :
……….
(2.2)…….. (2.3)
….. (2.4)
……… (2.5)
…. (2.6)
……….. (2.7)
……… (2.8)
… (2.9)
….. (2.10)
…….. (2.11)
…………. …(2.12)
Dimana:
E = ggl induksi (Volt) N = Jumlah belitan C = Konstanta p = Jumlah kutub n = Putaran (rpm) f = Frequensi (Hz)
= Fluks magnetik (weber)
Untuk generator sinkron tiga phasa, digunakan tiga kumparan jangkar yang ditempatkan di stator yang disusun dalam bentuk tertentu, sehingga susunan kumparan jangkar yang sedemikian akan membangkitkan tegangan induksi pada ketiga kumparan jangkar yang besarnya sama tapi berbeda fasa 1200 satu sama lain. Setelah itu ketiga terminal kumparan jangkar siap dioperasikan untuk menghasilkan energi listrik. [2]
2.4 Reaksi Jangkar
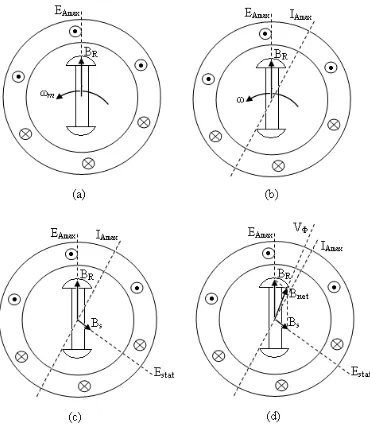
Gambar 2.6 Model Reaksi Jangkar
Pada Gambar 2.6.a. Medan magnet yang berputar akan menghasilkan tegangan induksi E
a. Bila generator melayani beban dengan induktif, maka arus
pada stator akan tertinggal seperti pada Gambar 2.6.b. Arus stator tadi akan meghasilkan medan magnet sendiri B
s dan tegangan stator Estat, seperti pada
Gambar 2.6.c. Vektor penjumlahan antara BS dan BR akan menjadi Bnet dan
penjumlahan Estat dan Ea, akan menghasilkan , V pada terminal jangkar.
Saat beban terhubung ke beban induktif, arus jangkar akan tertinggal terhadap tegangan jangkar. Arus pada belitan stator akan menghasilkan medan magnet B
s, yang kemudian kan menghasilkan tegangan stator Estat. Dua tegangan
yaitu tegangan jangkar E
a dan tegangan reaksi jangkar Estat akan menghasilkan Vt ,
dimana ditunjukkan pada persamaan (2.14)
V
Tegangan Reaksi Jangkar E
stat = - j X Ia
Sehingga persaman 2.14 dapat ditulis kembali pada persamaan (2.15). V
t = Ea-jXIa ...(2.15)
Selain pengaruh reaksi jangkar ini, pengurangan tegangan induksi generator sinkron juga karena adanya tahanan R
a dan Induktansi belitan stator Xa, ,dan
penjumlahan X dan Xa sering disebut Reaktansi Sinkron Xs, sehingga persamaan (2.15) dapat ditulis kembali sebagai persamaan (2.16).
V
t = Ea-jXIa-jXaIa- IaRa ...(2.16)
Lalu menjadi persamaan (2.17) V
t = Ea-jXsIa- IaRa...(2.17)
Dimana:
Vt = Tegangan terminal jangkar Ra = Tahanan Jangkar
Ea = Tegangan Jangkar BS = Medan Magnet Stator
Estat = Tegangan Reaksi Jangkar BR = Medan Magnet Rotor
Xs = Reaktansi Sinkron
Ia = Arus Jangkar
2.5 Sistem Eksitasi
Berdasarkan cara penyaluran arus searah pada rotor generator sinkron, sistem eksitasi terdiri dari dua sistem yaitu sistem eksitasi dengan menggunakan sikat (brushless excitation) dan sistem eksitasi tanpa menggunakan sikat (brushless).
Untuk sistem eksitasi yang konvensional, arus searah diperoleh dari sebuah generator arus searah berkapasitas kecil yang disebut eksiter. Generator sinkron dan generator arus serah tersebut terkopel dalam satu poros, sehingga putaran generator arus searah sama dengan putaran generator sinkron.
Tegangan yang dihasilkan oleh generator arus searah ini diberikan kebelitan rotor generator sinkron melalui sikat karbon dan slip ring. Akibatnya arus searah mengalir ke dalam rotor atau kumparan medan dan menimbulkan medan magnet yang diperlukan untuk dapat menghasilkan tegangan arus bolak-balik pada kumparan utama yang terletak di stator generator sinkron.
Gambar 2.7 Sistem Eksitasi Menggunakan Generator Arus Searah
2 Sistem Eksitasi Statis
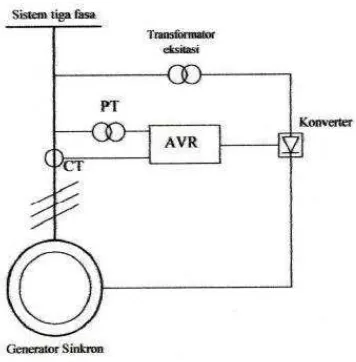
Sistem eksitasi statis menggunakan peralatan eksitasi yang tidak bergerak (static), artinya peralatan eksitasi tidak ikut berputar bersama dengan rotor generator sinkron. Sistem eksitasi statis (static excitation sistem) atau disebut juga dengan self excitation merupakan sistem eksitasi yang tidak memerlukan generator tambahan sebagai sumber eksitasi generator sinkron. Sumber eksitasi pada sistem eksitasi statis berasal dari tegangan output generator itu sendiri yang disearahkan terlebih dahulu dengan menggunakan penyearah thyristor.
Dibandingkan dengan generator yang konvensional generator dengan sistem eksitasi statis memang sudah jauh lebih baik yaitu tidak ada generator arus searah (yang keandalannya rendah) dan beban generator arus searah pada penggerak mula hilang. Eksiter diganti dengan eksiter yang tidak berputar yaitu penyearah karena itu disebut eksiter statis. Gambar 2.8 berikut adalah sistem eksitasi statis.
Gambar 2.8 Sistem eksitasi statis
Untuk keperluan eksitasi awal pada generator sinkron, maka sistem eksitasi statis dilengkapi dengan field flashing. Hal ini dibutuhkan karena generator sinkron tidak memiliki sumber arus dan tegangan sendiri untuk mensuplai kumparan medan. Penggunaan slip ring dan sikat pada eksitasi ini menyebabkan sistem eksitasi ini tidak efisien dan efektif.
Sedangkan sistem eksitasi tanpa menggunakan sikat terdiri dari : 1. Sistem eksitasi dengan menggunakan baterai.
Sedangkan sistem eksitasi tanpa menggunakan sikat :
1. Sistem Eksitasi Menggunakan Baterai
[image:52.595.213.450.423.618.2]Sistem eksitasi tanpa sikat diaplikasikan pada generator sinkron, dimana suplai arus searah kebelitan medan dilakukan tanpa melalui sikat. Arus searah untuk suplai eksitasi untuk awal start generator digunakan suplai dari baterai, yang sering dinamakan penguat mula, dimana arus ini selanjutnya disalurkan ke belitan medan AC exiter. Tegangan keluaran dari generator sinkron ini disearahkan oleh penyearah yang menggunakan dioda, yang disebut rotating rectifier, yang diletakkan pada bagian poros ataupun pada bagian dalam dari rotor generator sinkron, sehingga rotating rectifier tersebut ikut berputar sesuai dengan putaran rotor, seperti pada gambar 2.9 berikut:
Gambar 2.9 Sistem Eksitasi Dengan Menggunakan Baterai
disalurkan kebagian belitan medan dari generator utama. Hal ini dimungkinkan karena dioda penyearah ditempatkan pada bagian poros yang dimiliki bersama-sama oleh rotor generator utama dan penguat medannya. Arus medan pada generator utama dikontrol oleh arus yang mengalir pada kumparan medan penguat (eksiter).
2. Sistem Eksitasi Menggunakan Pemanen Magnet Generator
Suatu generator sinkron harus memiliki sebuah medan magnet yang berputar agar generator tersebut menghasilkan tegangan pada statornya. Medan magnet ini dapat dihasilkan dari belitan rotor yang disuplai dengan sumber listrik arus searah. Cara lain untuk menghasilkan medan magnet pada rotor adalah dengan menggunakan magnet permanen sebagai sumber eksitasinya ini disebut dengan Permanen Magnet Generator (PMG).
Gambar 2.10 Sistem Eksitasi Dengan Menggunakan Permanen Magnet Generator
Dari Gambar 2.17, bahwa pada bagian mesin yang berputar (rotor) terdapat magnet permanen, kumparan jangkar generator eksitasi, kumparan medan generator utama. Hal ini memungkinkan generator tersebut tidak menggunakan slip ring dan sikat dalam pengoperasiannya sehingga lebih efektif dan efisiensi. [9]
2.6 Rangkaian Ekivalen
Stator terdiri dari belitan-belitan. Suatu belitan konduktor akan terdiri dari
tahanan R
a dan induktansi XIamaka rangkaian ekivalen suatu generator sinkron dapat
dibuat seperti Gambar 2.11
[image:54.595.224.446.92.244.2] [image:54.595.196.419.586.684.2]Dengan melihat Gambar 2.11 maka tegangan generator sinkron dapat ditulis pada persamaan (2.18).
E
a = V + jXarIa + jXLaIa + Ra Ia………...(2.18)
Dan persamaan terminal generator sinkron dapat ditulis pada persamaan (2.19) Vt = Ea – jXarIa – jXLaIa – Ra Ia ...(2.19)
Dengan menyatakan reaktansi reaksi jangkar dan reaktansi fluks bocor sebagai reaktansi sinkron, atau X
s = Xar + XLa, maka menjadi persamaan (2.20).
Vt = Ea – jXsIa – RaIa [Volt]…..…...(2.20)
Dimana:
Vt = Tegangan Terminal Ia = Arus Jangkar
Ea = Tegangan Induksi Ra = Tahanan Jangkar
Xs = Reaktansi Sinkron Xar = Reaktansi Jangkar
XLa = Reaktansi Fluks Bocor
Gambar 2.12 Penyederhanaan rangkaian ekivalen generator sinkron
[image:55.595.215.417.500.591.2]tegangan induksi perfasa dengan tegangan terminal generator akan ditunjukkan pada Gambar 2.13
berikut:
Gambar 2.13 Rangkaian ekivalen generator sinkron 3 fasa Sementara itu, rangkaian ekivalen generator sinkron tiga fasa untuk tiap jenis hubungan ditunjukkan oleh Gambar 2.14 berikut ini:
[image:56.595.156.436.169.358.2] [image:56.595.143.496.461.610.2]2.7 Rangkaian Belitan 2.7.1 Belitan Stator
Ada dua jenis belitan stator yang banyak digunakan untuk generator sinkron 3 phasa, yaitu:
1. Belitan satu lapis (Single Layer Winding). 2. Belitan berlapis ganda (Double Layer Winding).
[image:57.595.168.455.296.442.2]1. Belitan satu lapis (Single Layer Winding).
Gambar 2.15 Belitan satu lapis (Single Layer Winding).
2. Belitan berlapis ganda (Double Layer Winding).
Kumparan jangkar yang diperlihatkan pada Gambar 2.15 hanya mempunyai satu lilitan per kutub per phasa, akibatnya masing – masing kumparan hanya dua lilitan secara seri. Bila alur-alur tidak terlalu lebar, masing-masing penghantar yang berada dalam alur akan membangkitkan tegangan yang sama. Masing – masing tegangan phasa akan sama untuk menghasilkan tegangan per penghantar dan jumlah total dari penghantar per phasa.
[image:58.595.169.457.454.603.2]Dalam kenyataannya cara seperti ini tidak menghasilkan cara yang efektif dalam penggunaan inti stator, karena variasi kerapatan fluks dalam inti dan juga melokalisir pengaruh panas dalam daerah alur dan menimbulkan harmonik. Untuk mengatasi masalah ini, generator praktisnya mempunyai kumparan terdistribusi dalam beberapa alur per kutub per phasa. Gambar 2.16 memperlihatkan bagian dari sebuah kumparan jangkar yang secara umum banyak digunakan. [5]
2.7.2 Belitan Rotor
Rotor berfungsi untuk membangkitkan medan magnet yang kemudian tegangan dihasilkan dan akan diinduksikan ke stator. Generator sinkron memiliki dua tipe rotor, yaitu :
1).Rotor berbentuk kutub sepatu (salient pole)
2).Rotor berbentuk kutub dengan celah udara sama rata (cylindrical)
Perbedaan utama antara keduanya adalah salient pole rotor digerakkan oleh turbin hidrolik kecepatan rendah sedangkan cylindrical rotor digerakkan oleh turbin uap berkecepatan tinggi. Bentuk rotor yang terdapat pada generator sinkron dapat dilihat pada Gambar 2.17 berikut
[image:59.595.130.493.372.516.2](a) Rotor Kutub Menonjol (b) Rotor Silinder Gambar 2.17 Bentuk Rotor
2.8 Karakteristik Generator Sinkron 3 Fasa 2.8.1 Karakteristik Beban Nol
a.) Generator diputar pada kecepatan nominal (n) b.) Tidak ada beban yang terhubung pada terminal
[image:60.595.214.419.222.320.2]c.) Arus medan (If) dinaikkan dari nol hingga maksimum secara bertahap d.) Catat harga tegangan terminal (Vt) pada setiap harga arus medan (If) yang terlihat pada gambar 2.18 di bawah ini:
Gambar 2.18 Rangkaian Test Tanpa Beban
Dari Gambar dapat diperoleh persamaan umum generator pada persamaan (2.21). E
0 = Vt + Ia (Ra + jXs)...(2.21)
Pada hubungan generator terbuka (beban nol), I
a = 0. Maka persamaannya menjadi
persamaan (2.22).
E0 = Vt = Cn …...…..(2.22)
Karena tidak ada beban yang terpasang, maka yang dihasilkan hanya f.
Sehingga menjadi persamaan (2.23)
E0 = Cn f ...(2.23)
Dari persamaan (2.23) menjadi persamaan (2.24) E0 = CnIf... (2.24)
Dimana:
E0 = Tegangan pada saat beban nol Ia = Arus Jangkar
C = Konstanta n = Jumlah Putaran
If = Arus Medan Ra = Tahanan Jangkar
Xs = Reaktansi Sinkron
Pengujian beban nol terkait dengan karakteristik beban nol yaitu hubungan antara tegangan induksi Ea dengan arus penguat /eksitasi If . pada pengujian beban
nol, rotor generator diputar pada kecepatan nominal dan terminal jangkar dalam keadaan terbuka. Arus medan If diatur bertahap nol hingga diperoleh harga
tegangan induksi Ea. bersekitar kurang lebih 125% dari tegangan nominal
generator. Pada kondisi ini arus jangkar Ia = 0 dan tegangan induksi Ea = Vt.
sehingga pembacaan tegangan induksi jangkar dengan pengaruh variasi medan eksitasi digambarkan karakteristik hubung terbuka dari generator atau OCC (Open-Circuit Characteristic). Yang terlihat pada gambar 2.19 dibawah:
Gambar 2.19 Karakteristik Hubung Terbuka (OCC)
[image:61.595.139.500.500.652.2]bentuk kurva mulai terlihat saturasi. Inti besi yang tidak jenuh dalam bingkai mesin sinkron memiliki reluktansi beberapa ratus kali lebih rendah daripada reluktansi air gap. Sehingga pertama-tama hampir seluruh MMF melewati celah udara dan peningkatan fluksi yang terjadi linear. Ketika inti besi mengalami saturasi, reluktansi besi meningkat secara drastis dan fluksi meningkat lebih lambat dengan peningkatan nilai MMF. Bentuk linear dari grafik OCC disebut karakteristik air gap line. [5]
2.8.2 Karakteristik Hubung Singkat
Untuk menentukan karakteristik dan parameter generator sinkron yang dihubung singkat terdapat beberapa langkah yang harus dilakukan antara lain :
a.) Generator diputar pada kecepatan nominal b.) Atur arus medan (I
f) pada nol
c.) Hubung singkat terminal d.) Ukur arus armatur (I
a) pada setiap peningkatan arus medan (If)
[image:62.595.198.421.601.709.2]Dimana, rangkaian test hubung singkat pada generator sinkron akan diperlihatkan pada Gambar 2.20 berikut.
Dari Gambar, persamaan umum generator sinkron dihubung singkat adalah persamaan (2.26)
Ea = Vt + Ia (Ra + jXs)... (2.26)
Pada saat generator sinkron dihubung singkat, V
t = 0 dan Ia = Isc . Maka persamaan
menjadi persamaan (2.27)
Ea = Isc (Ra + jXs) ... (2.27)
Ea = Cn maka persamaan nya menjadi persamaan (2.28).
Cn = I
sc (Ra + jXs)... (2.28)
Karena Cn dan (R
a + jXs ) bernilai konstan, maka persamaan nya menjadi
persamaan (2.29) Cn = k
1... (2.29)
sehingga menjadi persamaan (2.30) (R
a + jXs) = k2... (2.30)
Sehingga menjadi persamaan (2.31) k
1.If = Isc. k2... (2.32)
sehingga menjadi persamaan (2.33)
... (2.34)
Pengujian hubung singkat terkait dengan karakteristik hubung singkat yaitu hubungan antara arus jangkar Ia dengan arus penguat/eksitasi If. Pada pengujian
Pada karakteristik generator hubung singkat bentuk kurva adalah linear. Hal ini disebabkan oleh medan magnet yang terjadi sangat kecil sehingga inti besi tidak mengalami saturasi. Gambar 2.21 berikut ini akan memperlihatkan karakteristik hubung singkat pada generator sinkron. [5]
[image:64.595.190.431.194.364.2]Gambar 2.21 Karakteristik Hubung Singkat
Ketika generator dihubung singkat, arus armatur pada persamaan (2.35) ... (2.35)
Harga Mutlaknya adalah pada persamaan (2.36) ...(2.36)
Dimana:
Isc =Arus Hubung Singkat Ia = Arus Jangkar
C = Konstanta n = Jumlah Putaran
If = Arus Medan Ra = Tahanan Jangkar
Xs = Reaktansi Sinkron Ea = Tegangan Induksi
2.8.3 Karakteristik Berbeban
Beberapa langkah untuk menentukan parameter generator sinkron berbeban antara lain sebagai berikut :
a.) Generator diputar pada kecepatan nominal (n) b.) Beban (Z
L) terpasang pada terminal generator sinkron
c.) Arus medan (I
f) dinaikkan dari nol hingga maksimum secara bertahap
d.) Catat tegangan terminal (V
t) pada setiap peningkatan arus medan (If) yang
[image:65.595.187.437.319.428.2]terlihat pada gambar 2.22 berikut:
Gambar 2.22 Rangkaian Generator Sinkron Berbeban
Dari Gambar 2.22 diperoleh persamaan umum generator sinkron berbeban pada persamaan (2.37)
E
a = Vt + Ia (Ra + jXs)... (2.37)
Sehingga menjadi persamaan (2.38) V
t = Ea - Ia (Ra + jXs) ... (2.38)
Dimana :
Vt = Tegangan Terminal Ia = Arus Jangkar
Ra = Tahanan Jangkar Xs = Reaktansi Sinkron
Dalam keadaan berbeban arus jangkar akan mengalir dan mengakibatkan terjadinya reaksi jangkar. Reaksi jangkar bersifat reaktif karna itu dinyatakan sebagai reaktansi, dan disebut reaktansi magnetisasi (Xm). reaktansi ini
bersama-sama dengan reaktansi fluks bocor (Xa) yang dikenal dengan reaktansi sinkron
(Xs). Pada generator berbeban, Ia = IL bernilai konstan karena beban (ZL)
[image:66.595.211.412.254.428.2]tetap.terlihat pada gambar 2.23 di bawah ini:
Gambar 2.23 Karakteristik Generator Sinkron Berbeban
Watak berbeban suatu generator sinkron merupakan penggambaran dari hubungan antara tegangan terminal (Vt) dan arus medan (Ia) dimana beban generator tetap,
dan jumlah putaran tetap. [5]
2.9 Pengaturan Tegangan Terminal
[image:66.595.123.508.610.694.2]Dimana tegangan terminal dituntut untuk bekerja stabil dalam sistem. Seiring perubahan beban maka akan mengalir arus beban (Ia) yg berubah-ubah
sesuai dengan perubahan beban. Yang berpengaruh pada tahanan (Ra) dan
reaktansi sinkron (Xs) atau yang disebut dengan impedansi sinkron (Zs). arus
beban akan merubah harga tegangan induksi jangkar (Ea) sesuai dengan
persamaan (2.20) yaitu V
t = Ea - Ia (Ra + jXs). oleh sebab itu untuk menjaga
tegangan terminal agar tetap stabil seiring dengan perubahan arus beban yaitu dengan mengatur tegangan induksinya (Ea). dimana tegangan induksi seperti
persamaan (2.13) dimana Ea=Cn pada beban nol. Sehingga untuk mengatur
tegangan induksi dilakukan dengan mengatur jumlah putaran (n) dan fluksi magnetik ( ).
Pengaturan jumlah putaran mengakibatkan Penggerak mula (Prime Mover). karena kecepatan putaran rotor diputar dengan menggunakan energi mekanis yang berasal dari penggerak mula. Penggerak mula dioperasikan dengan menggunakan energi primer (Ep) dan energi sekunder (Es) yang berhubungan dengan bahan bakar.
Sedangkan pengaturan fluksi magnetik berdasarkan eksitasi yang diberikan. Yaitu dengan memberikan tegangan DC (Vf) pada kumparan medan.
Pada rangkaian tertutup akan mengalir arus DC (If). Arus DC yang mengalir pada
2.10 Rugi-Rugi Generator Sinkron
Rugi-rugi yangterdapat pada generator sinkron dibagi menjadi beberapa bagian diantaranya :
1. Rugi-rugi tembaga rotor dan stator (copper losses) 2. Rugi-rugi inti (core losses)
3. Rugi-rugi mekanik (mechanical losses) 4. Rugi-rugi nyasar (stray losses)
Rugi-rugi angin dan gesekan dipengaruhi oleh ukuran dan bentuk dari bagian yang berputar, rancangan sudu kipas rotor, desain bantalan (bearing) dan susunan rumah (housing) mesin. Rugi yang hilang tersebut berupa daya yang diperlukan untuk memutarkan kipas guna mensirkulasi udara pendingin dan gesekan bantalan dan sikat.
Rugi-rugi inti dan besi (P
i ) disebabkan oleh fluksi utama mesin dan terjadi
terutama pada gigi-gigi stator (jangkar), pada bagian inti jangkar dekat gigi-gigi stator dan pada permukaan kutub rotor. Inti stator umumnya dibentuk dari laminasi tipis baja silikon yang terisolasi satu sama lain untuk membatasi rugi-rugi histeresis dan arus eddy pada baja.
Rugi-rugi mekanik dan inti sering digabung bersama yang disebut dengan rugi-rugi beban nol pada mesin. Pada keadaan beban nol, daya input mesin digunakan untuk mengatasi rugi-rugi ini. Oleh karena itu pengukuran daya input stator.
Rugi-rugi tembaga rotor (P
RCL = If 2
.R
f) dihitung dari arus medan dan
rugi-rugi penguat. Rugi-rugi-rugi tembaga kumparan jangkar (P
SCL = 3IA 2
.R
A) pada
[image:69.595.167.508.177.304.2]umumnya dihitung dari tahanan arus searah kumparan jangkar pada suhu 750
Gambar 2.25 Diagram Aliran daya Generator sinkron
Dari gambar 2.25 dapat dilihat bahwa persamaan (2.39) di bawah ini: …….. (2.39)
Maka semakin baik faktor daya yang dihasilkan maka daya out put juga semakin
besar, dengan kata lain rugi – rugi yang dihasilkan menjadi lebih kecil. Maka dari
Persamaan 2.39 dapat disimpulkan semakin baik faktor daya, maka efisiensi yang
dihasilkan juga semakin baik. [1]
2.11 Pengaruh Faktor Daya Terhadap Regulasi dan Efisiensi
...(2.40) Dimana:
E
f = Tegangan terminal generator pada saat beban nol
Vt = Tegangan terminal generator pada saat beban penuh [volt]
Seperti halnya dengan mesin-mesin listrik lainnya, maupun transformator, maka efisiensi generator sinkron dapat dituliskan sebagai persamaan (2.41).
...(2.41) dimana :
P
in = Pout + Σ rugi P
P
out = daya keluaran
P
in = daya masukan
2.12 Faktor Daya
Dalam sistem listrik AC/Arus Bolak-Balik ada tiga jenis daya yang dikenal, khususnya untuk beban yang memiliki impedansi (Z), yaitu:
Daya semu (S), VA (Volt Amper)
Daya aktif (P), Watt
Daya reaktif (Q), VAR (Volt Amper Reaktif)
Sedangkan daya semu dinyatakan dengan satuan Volt-Ampere (disingkat,
VA), menyatakan kapasitas peralatan listrik, seperti yang tertera pada peralatan
generator dan transformator. Pada suatu instalasi, khususnya di pabrik/industri juga
terdapat beban tertentu seperti motor listrik, yang memerlukan bentuk lain dari daya,
yaitu daya reaktif (VAR) untuk membuat medan magnet atau dengan kata lain daya
reaktif adalah daya yang terpakai sebagai energi pembangkitan flux magnetik
sehingga timbul magnetisasi dan daya ini dikembalikan ke sistem karena efek induksi
elektromagnetik itu sendiri, sehingga daya ini sebenarnya merupakan beban
[image:71.595.223.392.336.457.2](kebutuhan) pada suatu sistim tenaga listrik.
Gambar 2.26 Segitiga Daya
Faktor daya atau faktor kerja adalah perbandingan antara daya aktif (watt)
dengan daya semu/daya total (VA), atau cosinus sudut antara daya aktif dan daya
semu/daya total (lihat Gambar 2.26). Daya reaktif yang tinggi akan meningkatkan
sudut ini dan sebagai hasilnya faktor daya akan menjadi lebih rendah. Faktor daya
Besarnya daya reaktif yang diperlukan untuk mengubah faktor daya dari cos φ1 menjadi cos φ2 dapat ditentukan dengan persamaan (2.42)
[image:72.595.202.402.184.311.2]ΔQ = PTan (φ1 –φ2) VAR ... (2.42)
Gambar 2.27 Perbaikan Faktor Daya
Kemudian besar nilai kapasitornya dapat dihitung dengan persamaan (2.43) ………. (2.43)
Dimana :
φ1 : adalah faktor daya sebelum diperbaiki φ2 : adalah faktor daya sesudah diperbaiki ΔCperfasa : Besar nilai kapasitor perfasa
ΔQ : Jumlah daya reaktif yang dibutuhkan untuk memperbaiki faktor daya (VAR)
satu, dan faktor daya terdahulu, dimana Vt' adalah tegangan terminal setelah beban dengan faktor daya yang sama ditambahkan, dan Vt menyatakan tegangan terminal pada saat awal.
(a)
(b)
(c)
[image:73.595.211.416.177.635.2]Terlihat bahwa untuk beban induktif, pertambahan beban akan mengurangi tegangan terminal akan mengecil. Begitu juga jika beban resistif ditambahkan maka tegangan terminal juga akan mengecil. Jika beban kapasitif ditambahkan, maka tegangan terminal cenderung membesar. [8]
2.13 Regulasi Tegangan
Jika pada sebuah generator dilakukan pengukuran tegangan dalam keadaan
tanpa beban dan berbeban, ternyata terdapat perbedaan dari hasil pengukuran
tersebut. Dimana terlihat bahwa dengan berubahnya beban maka tegangan terminal
dari generator juga akan berubah. Perubahan besarnya (magnitude) tegangan tidak
hanya tergantung dari besarnya beban, tetapi juga dipengaruhi cos φ beban.
Pengaturan tegangan (voltage regulation) dari suatu generator sinkron dapat didefinisikan sebagai perubahan tegangan terminal dari beban nol (no-load) ke beban penuh (full-load) dengan menjaga eksitasi medan dan putaran tetap, dibagi dengan tegangan beban penuh (full-load). Dimana tegangan pada terminal dari generator sinkron tergantung dari beban yang terpasang dan juga faktor daya (power factor) beban tersebut. Pengaturan tegangan ini dinyatakan dalam persen (%) dari tegangan nominal dan perbedaan tegangan bukan secara vektor, tetapi besaran yang dinyatakan dalam persamaan (2.44)
………(2.44)
VR = Regulasi Tegangan Vt = Tegangan Terminal
Perlu dicatat bahwa E
0 - VFL adalah selisih aritmatik bukan selisih fasor.
Faktor – faktor yang mempengaruhi regulasi tegangan sebuah generator sinkron
antara lain :
a.) Jatuh tegangan akibat I
aRapada belitan jangkar
b.) Jatuh tegangan akibat I
aXL
c.) Perubahan tegangan akibat reaksi jangkar
[image:75.595.181.443.336.513.2]Gambar 2.29 menunjukkan pengaruh perubahan beban terhadap perubahan tegangan terminal dengan faktor daya (power factor) yang berbeda.
Gambar 2.29 Pengaruh Perubahan beban terhadap tegangan terminal
Dari Gambar 2.29 dapat dilihat bahwa perubahan tegangan terminal karena
reaksi jangkar bergantung pada arus beban (I
L) dan faktor daya (PF) dari beban.
Untuk beban dengan faktor daya mendahului (leading), tegangan terminal tanpa
beban lebih kecil daripada tegangan terminal beban penuh. Oleh karena itu, regulasi
tegangan bernilai negatif. Untuk beban dengan faktor daya tertinggal (lagging),
Maka, regulasi tegangan bernilai positif. Sedangkan untuk beban dengan faktor daya
1 (unity), nilai tegangan terminal tanpa beban hampir sama dengan nilai tegangan
terminal beban penuh. Oleh karena itu, regulasi tegangan bernilai mendekati 0 persen.
[5]
Untuk setiap metode mencari regulasi tegangan, diperlukan data – data sebagai berikut :
1.) Tahanan jangkar (armatur) R
a
Tahanan jangkar R
a per fasa ditentukan dengan menggunakan metode
pengukuran langsung dan bernilai searah (DC). Harga tahanan jangkar efektif (AC) lebih besar dari pada nilai DC ini karena adanya skin effect. Untuk memperoleh nilai efektifnya, nilai hasil pengukuran (nilai DC) biasanya dikalikan faktor kali (f) :
R
a = 1,5 Rdc
2.) Karakteristik beban nol atau open circuit characteristic (OCC)
Sama seperti kurva magnetisasi pada suatu mesin DC, karakteristik beban nol dari suatu generator sinkron adalah kurva antara tegangan terminal jangkar (tegangan fasa – fasa) pada keadaan hubungan terbuka dan arus medan ketika generator sinkron (alternator) bekerja pada kecepatan nominal.
3.) Karakteristik hubung singkat atau short circuit characteristic (SCC)
Gambar rangkaian, langkah – langkah dan karakteristik hubung singkat (SCC) telah diperlihatkan disub bab sebelumnya. Dimana, terminal – terminal armatur dihubung singkat melalui ampere meter dan arus medan (I
bertahap dari nol hingga diperoleh arus hubung singkat (I
sc) bernilai hampir dua
kali arus nominal. Selama test ini kecepatan yang mungkin bukan kecepatan sinkron harus dijaga konstan. Untuk metode Potier faktor daya adalah nol.
Tidak diperlukan pembacaan lebih dari sekali karena SCC merupakan suatu
garis lurus yang melewati titik awal. Hal ini disebabkan karena tahanan jangkar R
a
lebih kecil daripada reaktansi sinkron (X
s), arus hubung singkat (Isc) tertinggal hampir
sebesar 90º terhadap tegangan terinduksi V
f. Akibatnya, fluks armatur (
φ
a) dan fluksmedan (
φ
f ) berlawanan arah sehingga fluks resultan (
φ
R) bernilai kecil. Karena (φ
R)bernilai kecil, pengaruh saturasi akan diabaikan dan arus hubung singkat (I
sc)
berbanding lurus dengan arus medan melebihi batas (range) dari nol sampai
melampaui arus nominal.
2.15 Metode Penentuan Regulasi Tegangan Generator 3 Fasa
Cara menentukan pengaturan tegangan untuk mesin – mesin kecil dapat diperoleh dengan cara langsung, yaitu generator sinkron diputar pada kecepatan
nominal, eksitasi diatur sehingga menghasilkan tegangan nominal (V) pada beban
penuh, kemudian beban dilepas dengan menjaga agar putaran tetap konstan. Selain
itu, arus eksitasi juga harus dijaga konstan. Maka, akan diperoleh harga tegangan
pada beban nol (E0) dan regulasi tegangan dapat dihitung dengan persamaan di atas.
Untuk mesin – mesin besar, metode yang digunakan untuk menentukan
regulasi tegangan dengan cara langsung sering kali tidak dapat dilakukan. Hal ini
langsung yang hanya memerlukan sejumlah kecil daya jika dibandingkan dengan
daya yang diperlukan pada metode langsung. Beberapa metode tersebut antara lain :
a.) Metode impedansi sinkron (EMF)
b.) Metode ampere lilit (MMF)
c.) Metode Potier (zero power factor)
d.) Metode New ASA (American Standard Association)
dalam Tugas Akhir ini hanya akan dibahas metode Potier (zero power factor)
dan metode New ASA (American Standard Association)
2.15.1 Metode Potier
Metode ini disebut juga metode umum , atau metode reaktansi potier, atau metode reaksi jangkar dalam menentukan pengaturan tegangannya. Pada metode EMF, fasor tegangan digunakan dan pada metode MMF fasor mmf digunakan, untuk metode ZPF kedua fasor ini digunakan, yakni emf dan mmf sebagai tegangan, dan mmf sebagai eksitasi atau amper medan.
Khusus untuk karakteristik beban penuh dengan faktor daya nol dapat diperoleh dengan cara melakukan percobaan terhadap generator seperti halnya pada saat percobaan tanpa beban, yaitu menaikkan arus medan secara bertahap, yang membedakannya supaya menghasilkan faktor daya nol, maka generator harus diberi beban reaktor murni. Arus jangkar dan faktor daya nol saat dibebani harus dijaga konstan.
Langkah-langkah untuk menggambar Diagram Potier sebagai berikut :
2. Gambarkan garis sejajar melalui kurva beban nol. Buat titik A yang menunjukkan nilai arus medan pada percobaan faktor daya nol pada saat tegangan nominal.
3. Buat titik B, berdasarkan percobaan hubung singkat dengan arus jangkar penuh. OB menunjukkan nilai arus medan saat percobaan tersebut.
4. Tarik garis AD yang sama dan sejajar garis OB.
5. Melalui titik D tarik garis sejajar kurva senjang udara sampai memotong kurva beban nol dititik J. Segitiga ADJ disebut segitiga Potier.
6. Gambar garis JF tegak lurus AD. Panjang JF menunjukkan kerugian tegangan akibat reaktansi bocor.
7. AF menunjukkan besarnya arus medan yang dibutuhkan untuk mengatasi efek magnetisasi akibat reaksi jangkar saat beban penuh.
8. DF untuk penyeimbang reaktansi bocor jangkar (JF).
Seperti yang di tunjukkan pada Gambar 6.8.1dibawah ini :
[image:79.595.193.431.497.702.2]Dari Gambar diagram Potier diatas, bisa dilihat bahwa : - V nilai tegangan terminal saat beban penuh.
a. V ditambah JF (I.X) menghasilkan tegangan E.
- BH = AF = arus medan yang dibutuhkan untuk mengatasi reaksi jangkar. - Bila vektor BH ditambah kan ke OG, maka besarnya arus medan yang dibutuhkan untuk tegangan tanpa beban E
0 dapat diketahui dengan persamaan
% VR =
Diagram vektor potier juga dapat digambarkan terpisah seperti Gambar 6.8.2 Berikut:
Gambar 2.31 Diagram Vektor Potier Dari Gambar 3.14 di atas dapat diketahui bahwa :
a.) Untuk faktor daya lagging dengan sudut φ, vektor I digambarkan tertinggal dari V sebesar φ.
b.) Vektor IRa digambarkan sejajar dengan vektor I dan IXL digambarkan tegak lurus terhadap IRa.
d.) Garis GI (garis BH = garis AF pada gambar 3.13) menunjukkan arus medan yang sebanding dengan reaksi jangkar beban penuh dan digambarkan sejajar dengan vektor arus I.
e.) Garis OI menunjukkan eksitasi medan untuk tegangan E0. Dimana, vektor E0 tertinggal sebesar 90º terhadap garis OI.
f.) Garis JK menunjukkan jatuh tegangan akibat reaktansi jangkar (IXL).
6.8.2 Metode New ASA ( American Standart Association )
Metode ini merupakan modifikasi dari metode MMF yang memberikan hasil yang lebih memuaskan dan dapat digunakan untuk kedua jenis mesin sinkron type rotor silent maupun rotor silient kompleks. Hanya dua titik A dan F’ yang diperlukan dari ZPFC . titik A ditentukan dari pembebanan over exiter ( untuk alternator dan under exiter ( untuk motor ) sampai arus jankar beban penuh mengalir pada tegangan normalnya. Titik F’ ditentukan dari ( Fa + Fat ) yang
BAB I
PENDAHULUAN
1.1 Latar Belakang
Permintaan akan kebutuhan energi listrik yang terus meningkat menyebabkan beban yang bervariasi dan tidak stabil sehingga dapat mempengaruhi tegangan dan daya keluaran dari generator sinkron tersebut. Sehingga menyebabkan perubahan tegangan terminal yang akan berpengaruh pada efisiensi serta keandalan suatu sistem, dengan demikian diperlukan pengujian terhadap generator sinkron.
Konstruksi umum dari suatu Generator Sinkron adalah pengerak mula, Rotor atau bagian yang berputar, stator bagian yang diam dan celah udara antara Stator dan Rotor. Rotor sendiri terdiri atas Rotor Silinder dan Rotor kutub sepatu yang masing-masing memiliki fungsi berbeda. Disamping itu juga perlu rangkaian eksitasi sebagai penghasil tegangan induksi pada terminal jangkar. Untuk Generator Sinkron yang besar Rangkaian jangkar berada pada bagian Rotor. Untuk Rangkaian eksitasi yaitu eksitasi dengan sikat dan tanpa sikat.
Pada Generator sinkron energi mekanik yang diubah berupa putaran menjadi energi listrik bolak balik (AC), Energi mekanis diberikan oleh penggerak mulanya. Sedangkan energi listrik bolak balik (AC) pada rangkaian jangkarnya. Kumparan medan pada generator sinkron berada di rotor (bagian yang berputar) dan kumparan jangkar berada di stator (bagian yang tidak berputar).
terhadap beban terutama beban-beban elektronik. Salah satu penyebab altenator bekerja tidak stabil adalah tegangan terminal. Untuk itu perlu dilakukan pengujian, maka dari itu penulis akan melakukan pengujian Berupa analisa perbandingan penentuan regulasi tegangan generator sinkron 3 fasa dengan menggunakan metode potier dan new asa.
1.2 Perumusan Masalah
Masalah yang akan dianalisa dalam tugas akhir ini adalah menentukan regulasi tegangan generator sinkron 3. Pada tugas akhir ini dilakukan perbandingan penentuan regulasi tegangan generator sinkron 3 fasa dengan menggunakan Metode Potier dan New ASA sehingga didapat hasil yang lebih baik antara metode Potier dan New Asa.
1.3 Tujuan dan Manfaat Penulisan
Tujuan dari tugas akhir ini adalah untuk mengetahui metode mana yang paling efisien dalam menentukan regulasi tegangan generator sinkron 3 fasa dengan melakukan perbandingan antara metode potier dan metode new asa.