PENGEMBANGAN PI CONTROLLER SEBAGAI KENDALI RESPON
CEPAT PADA MOTOR INDUKSI 3 FASA BERBASIS INDIRECT FIELD
ORIENTED CONTROL (IFOC)
Rizana Fauzi
1,
Dedid Cahya Happiyanto
2, Indra Adji Sulistijono
3 1Teknik Mekanisasi Pengolahan, Politeknik Palu
Jl. Sinar Kemuning 1 No 1A Bumi Roviga Tondo, Palu, Sulawesi Tengah 2,3
Politeknik Elektronika Negeri Surabaya (PENS)
Kampus PENS, Jalan Raya ITS Sukolilo, Surabaya 60111 Indonesia Email: [email protected], [email protected],
Abstrak
Penelitian mengenai pengaturan kecepatan pada motor induksi 3 fasa semakin lama semakin berkembang, dikarenakan penggunaan pada industri dan khususnya pada kendaraan hybrid semakin banyak dikembangkan. Namun ada beberapa kelemahan motor induksiyang salah satunya adalah karakteristik parameter yang tidak linier, terutama resistansi rotor yang memiliki nilai yang bervariasi untuk kondisi operasi yang berbeda, sehingga tidak dapat mempertahankan kecepatannya secara konstan bila terjadi perubahan beban. Oleh karena itu untuk mendapatkan kecepatan yang konstan dan performa sistem yang lebih baik terhadap perubahan beban dibutuhkan sebuah pengontrol. Penelitian ini bertujuan untuk mengimplementasikan metode Indirect Field Oriented Control (IFOC) dengan controller Proportional-Integral(PI) pada aplikasi kendali kecepatan motor Induksi 3 phase dalam mengikuti kecepatan referensi dengan respon tercepat dan nilai osilasi terkecil. Kendali Proportional-Integral(PI) yang digunakan merupakan sistem kendali klasik yang mudah karena tidak perlu mencari model matematis dari sistem, tetapi tetap efektif karena memiliki respon sistem yang cukup stabil, dengan mengatur kombinasi yang terbaik dari konstanta proportional (Kp) dan konstanta Integrator (Ki). Pada hasil implementasi, dapat dilihat bahwa penggunaan IFOC dapat digunakan sebagai pendekatan dalam hal pengaturan kecepatan motor induksi. Pendekatan yang dilakukan oleh IFOC hanya berfungsi untuk mengubah parameter nonlinier (parameter motor ac) ke parameter linier (menyerupai motor dc), sehingga mudah untuk dikendalikan, dan dengan penggunaan kendali PI dapat membantu respon output menjadi lebih baik dengan waktu respon yang lebih singkat untuk mencapai nilai referensi.
Kata kunci:Proportional-Integral, IFOC, motor induksi
Pendahuluan
Aplikasi motor induksi 3 fasasemakin lama semakin berkembang, dikarenakan kehandalannya pada penggunaan di industri dan khususnya pada kendaraan hybrid semakinbanyakdikembangkan.Namun ada beberapa kelemahan motor induksiyang salah satunya adalahkarakteristik parameter yang tidak linier, terutamaresistansi rotor yang memiliki nilai yang bervariasi untuk kondisi operasi yang berbeda, sehingga tidak dapat mempertahankan kecepatannya secara konstan bila terjadi perubahan beban. Dikarenakan hal tersebut, untuk mendapatkan kecepatan yang konstan dan performa sistem yang lebih baik terhadap perubahan beban dibutuhkan sebuah pengendali.
Pada gambar 1, dapat dilihat ilustrasi pada motor induksi pada saat kecepatan rotor mulai nol hingga kecepatan maksimalnya, untuk bergerak dengan kecepatan rendah, arus yang dibutuhkan sangat tinggi hingga mencapai tujuh kali arus kerjanya, sedangkan saat kecepatannya mulai tinggi, arus yang dibutuhkan berkurang hingga arus kerja normalnya.
Pada prinsipnya motor Induksi 3 phase bekerja dengan memanfaatkan perbedaan fasa sumber untuk menimbulkan gaya putar pada rotornya. Jikapada motor Induksi 1 phase untuk menghasilkan beda phase diperlukan penambahan komponen kapasitor, pada motor 3 phase perbedaan phase sudah didapat langsung dari sumber seperti terlihat pada gambar arus 3 phase berikut ini:
Gambar2.Grafikarus 3 fasa
Persamaan untuk pemodelan motor induksi, adalah sebagai berikut: v
Jika dipergunakan pengamatan konvensional, diperkirakan fluks stator dihitung berdasarkan persamaan motor menggunakan integrator murni sebagai berikut:
= −
= −
(6)
(7)
Diperkirakan fluks rotor dihitung dari perkiraan stator fluks sebagai berikut:
r =−
Perkiraan Sudut untuk fluks rotors diperoleh sebagai berikut.
r =dθ r
dt where θ r = tan
−1 r
r
(10)
Metode
Indirect Field Oriented Control (IFOC)
Indirect Field Oriented Control (IFOC) adalah suatu metode pengaturan medan pada motor AC, di mana dari sistem coupled diubah menjadi sistem decoupled. Dengan sistem ini arus penguatan dan arus beban motor dapat dikontrol secara terpisah, dengan demikian torsi dan fluksi juga dapat diatur secara terpisah, seperti halnya motor DC. Pada IFOC yang diatur adalah banyaknya fluks yang akan berdampak langsung dengan perubahan kecepatan pada motor induksi. Pengukuran besarnya fluks tidak diukur secara langsung, melainkan dapat diperkirakan dengan perubahan nilai dari kecepatan rotor motor yang dimonitor oleh sensor rotari. Kecepatan motor diumpanbalikkankemudiandibandingkandengankecepatanreferensiolehsuatukomparator.
Gambar 5. diagram blok pengaturan kecepatan motor induksi dengan IFOC[1]
Fluks rotor dan torsi dapat dikontrol secara terpisah oleh arus stator direct-axis (ids) dan arus quadratur-axis (iqs) secara berurutan. Besar arus quadratur-axis referensi (i*qs) dapat dihitung dengan torsi referensi Te* menggunakan persamaan berikut,
Dengan� =�adalah konstanta waktu rotor.
Besarnya arus direct-axis stator referensi ∗ adalah tergantung dari input fluks referensi �∗ yaitu,
∗ = �∗
� (13)
Sudut flux rotor θe untuk transformasi koordinat diperoleh dari perhitungan antara kecepatan putaran rotor ωm dan kecepatan slip ωsl, dengan persamaan,
� = + (14)
kecepatan slip diperoleh dari perhitungan arus stator referensi ∗ dengan parameter motor,
=�
�∗ ∗� ∗ ∗ (15)
Arus referensi ∗ dan ∗ dikonversi ke dalam arus sefasa referensi ∗ , ∗ , ∗ yang akan menjadi input regulator arus. Kemudian regulator arus akan memproses arus fasa referensi menjadi sinyal pemicuan yang akan mengontrol inverter.
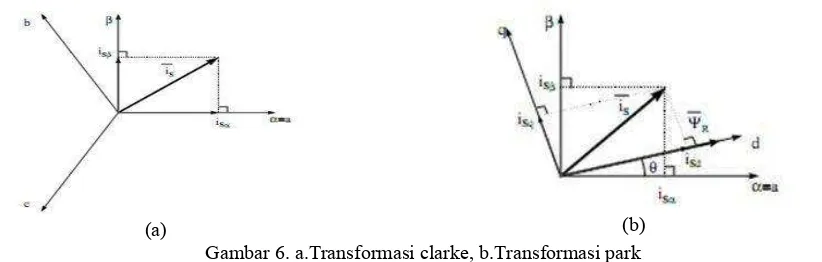
Transformasi Clarke
(a) (b) Gambar 6. a.Transformasi clarke, b.Transformasi park
Arus pada Gambar 8a. diatas bila dinyatakan sebagai fungsi dari komponen tiga fasa adalah sebagai berikut:
= 0 + 120 + 240 (16)
dan dengan menggunakan identitas Euler
= cos
(
) +
(
)
maka komponen dan dari vector (dengan superscript s mengimplikasikan kerangka referensi stasioner/stator) dapat dinyatakan sebagai:= + (17)
sehingga persamaan dalam bentuk matriks untuk mengubah komponen tiga fasa menjadi dua fasa, adalah sebagai berikut: antara vector pada kerangka referensi stasioner dan vector pada kerangka referensi yang bergerak adalah:
= − � (19)
persamaan di atas dapat dijabarkan menjadi:
= = + cos −� + (−� (20)
Atau bila persamaan di atas dinyatakan dalam matriks, maka:
= � �
− � �
(21)
Transformasi Clarke di dalam field oriented control motor induksi digunakan untuk mentransformasikan arus stator tiga fasa (ia, ib, danic) pada bidang stasioner (stationary reference frame) kearus stator orthogonal dua fasa (iαdaniβ) pada bidang ortogonal (orthogonal reference frame). Sedangkan Transformasi Park digunakan untuk mentransformasikan arus stator (iαdaniβ) kearus stator dua fasa (idsdaniqs) pada bidang putar (rotating reference frame).
Kendali Proporsional-Integral(P-I)
Sistem kontrol PI terdiri dari dua buah cara pengaturan yaitu control P (Proportional) dan I (Integral), dengan masing-masing memiliki kelebihan dan kekurangan. Dalam perancangan sistem kontrol PI yang perlu dilakukan adalah mengatur parameter P dan I agar tanggapan sinyal keluaran system terhadap masukan tertentu sebagaimana yang diinginkan.
Kendali Proporsional
(a) (b) Gambar 7. a.Kendali P, b.Kendali I
Kendali Integratif
Jika G (s) adalah kontrol I maka u dapat dinyatakan sebagai u (t) = [integrale (t) dT] Ki dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s) dapat dinyatakan sebagai u = Kd. [deltae / deltat] Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem.
Desain Sistem
Gambar8. Blok DesainSistem
Pada bagan di atas, dapat kita lihat bahwa arus stator direct-axis ∗ yang digunakan untuk penguatan flux dibuat konstan yang kemudian dijadikan parameter untuk IFOC dan pembanding konstan pada slip. Kecepatan putar rotor aktual secara kontinu dibaca oleh sensor kecepatan yang kemudian dibandingkan dengan kecepatan rotor referensi. Nilai selisih antara kecepatan rotor aktual dan referensi kemudian dijadikan sebagai nilai error yang akan diolah oleh kendali PI yang keluarannya berupa nilai arus quadratur-axis ∗ . Arus stator direct-axis ∗ dan nilai arus quadratur-axis ∗ dengan metode IFOC ditransformasi menjadi arus sefasastasioner referensi ∗ , ∗ , ∗ yang diolah oleh PWM inverter menjadi arus 3 phase untuk menggerakkan motor induksi 3 phase.
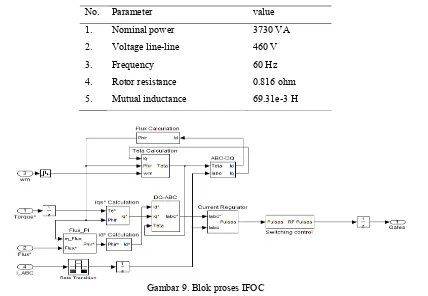
Table1. parameter of induction motor
No. Parameter value
1. Nominal power 3730 VA
2. Voltage line-line 460 V
3. Frequency 60 Hz
4. Rotor resistance 0.816 ohm
Gambar 10. Kendali motor induksi yang hanya menggunakan IFOC
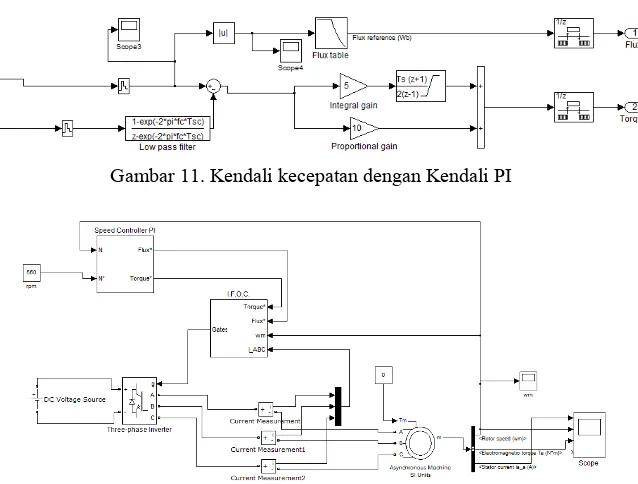
Gambar 11. Kendali kecepatan dengan Kendali PI
Gambar 12. IFOC dengan menggunakan kendali kecepatan PI pada motor induksi
Hasil dan Pembahasan
(a) (b)
Pada grafik gambar 13a, dapat kita lihat terjadi osilasi saat start, waktu dari start hingga mencapai nilai referensi membutuhkan waktu sekitar 0,9s dengan nilai overshoot yang cukup besar dan osilasi yang banyak.Pada grafik gambar 13b, dapat kita lihat terjadi osilasi saat start, waktu dari start hingga mencapai nilai referensi membutuhkan waktu sekitar 1,7s. Nilai overshoot yang cukup besar dan adanya osilasi saat mencapai referensi.
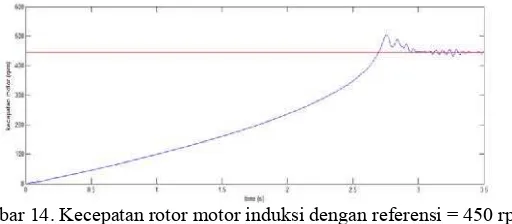
Kecepatan rotor motor induksi dengan referensi = 450 rpm, tanpa PI speed controller
Gambar 14. Kecepatan rotor motor induksi dengan referensi = 450 rpm
Pada grafik gambar 15, dapat kita lihat terjadi osilasi saat start, waktu dari start hingga mencapai nilai referensi membutuhkan waktu sekitar 2,7s. Nilai overshoot yang cukup besar dan osilasi saat mencapai referensi.
Gambar 15. a.Kecepatan rotor motor induksi dengan referensi = 250 rpm), b.Kecepatan rotor motor induksi dengan referensi = 350 rpm)
Pada grafik gambar 16a, dapat kita lihat tidak terjadi osilasi saat start, waktu dari start hingga mencapai nilai referensi membutuhkan waktu sekitar 0,005s. Overshoot tidak terjadi dan osilasi sangat kecil saat mencapai referensi.Pada grafik gambar 16b, dapat kita lihat tidak terjadi osilasi saat start, waktu dari start hingga mencapai nilai referensi membutuhkan waktu sekitar 0,005s. Overshoot tidak ada dan nilai osilasi saat mencapai referensi sangat kecil.
Gambar 16. Kecepatan rotor motor induksi dengan referensi = 450 rpm
Pada grafik di atas, dapat dilihat terjadi osilasi saat start, waktu dari start hingga mencapai nilai referensi membutuhkan waktu sekitar 0,005s. Nilai overshoottidak ada dannilai osilasi sangat kecil terjadi setelah kecepatan motor mendekati referensi.
Analisa Hasil
pada grafik hasil simulasi dapat dilihat bahwa :
terjadinya osilasi saat akan mencapai nilai referensi. Saat kecepatan rerefensi 250 rpm, kecepatan aktual sedikit melebihi nilai referensi dengan overshot yang cukup banyak.
2. Penggunaan kendali PI dapat membantu respon output menjadi lebih baik dengan waktu respon yang sangat singkat (<0,1s) untuk mencapai nilai referensi. Osilasi saat start tidak terjadi sehingga saat akan mencapai referensi tidak terjadi osilasi yang tinggi, berbeda jika hanya menggunakan metode IFOC saja. Respon sistem semakin baik, dibuktikan dengan peningkatan kecepatan respon aktual mencapai niai referensi. Nilai overshot tidak terjadi dengan nilai steady state error yang sangat kecil.
Kesimpulan
1. Dalam kendali kecepatan motor induksi penggunaan IFOC saja belum mampu manghasilkan performa yang baik, sehingga diperlukan adanya controller yang dapat memberikan tanggapan respon input yang baik, sehingga menghasilkan keluaran yang baik dengan nilai osilasi yang sangat kecil dan respon yang cepat.
2. Penggunaan kendali PI sangat baik digunakan dikarenakan dengan adanya kendali PI, nilai eror overshot dan undershot dapat diminimalisir sehingga pencapaian referensi dapat dilakukan dengan cepat dan dengan tingkat eror yang relatif lebih kecil.
Saran
1. Penerapan kendali PI sebagai speed controller dapat dikembangkan lagi dengan metode kendali modern seperti fuzzy dan sejenisnya, sehingga sistem dapat mengatur tingkat perbaikan pada eror secara lebih teliti.
2. Pada aplikasi pembebanan dapat ditambahkan fungsi perubahan beban sehingga jelas dilihat apa yang terjadi pada kecepatan motor saat bebannya tiba-tiba berubah.
Daftar Pustaka
C. C. Channand K. T. Chau, Member, IEEE, (1994), An Overview of Power Electronics in Electric Vehicles, IEEE Transactions on Industrial Electronics, vol. 44, no. 1.
Dong-Choon Lee, Seung-Ki Sul and Min-Ho Park, (1994), High PerformanceCurrent Regulator for a Field-Oriented Controlled Induction MotorDrive,” IEEE Trans. on Industry Application, vol. 30, no. 5, pp.1247-1257.
Jae-Sung Yu, Sang-Hoon Kim, (2007), Fuzzy logic based Vector Control scheme for permanent magnet Synchronous motors in elevator drive applicantion, IEEE Trans on Industrial Electronics, Vol. 54 No. 4.
Lashok, K., S.F. Kodad and B.V. Sankar Ram, (2009), Modelling of induction motor & control of speed using hybrid controller technology. J. Theor. Appl. Inform. Technol., 10: 117-126.
M. Vasudevan, R. Arumugam, S.Paramasivam, (2005), High Performance Adaptive Intelligent Direct Torque ControlSchemes for Induction Motor Drives, Serbian Journal Of Electrical Engineering, Vol. 2, No. 1, 93 – 116.
Nobuyoshi Mutoh, Satoru Kaneko, Taizou Miyazaki, Ryosou Masaki, and Sanshiro Obara, (1997), A Torque Controller Suitable for Electric Vehicles, IEEE Transactions On Industrial Electronics, vol. 44, no. 1.
Rodriguez, J., J. Pontt, C. Silva, R. Huerta and H. Miranda, (2009), Simple direct torque control of induction machine using space vector modulation. IEEE Electr. Lett., 40(7): 412-413.
Subhankar, D., S. Abhrajit, K.S. Pradip and K.P. Goutam, (2012), PID controller based closed loop control of L- matrix based induction motor using V/f constant method. J. Sci. Theory Meth., 2012: 1-21.
![Gambar 5. diagram blok pengaturan kecepatan motor induksi dengan IFOC[1]](https://thumb-ap.123doks.com/thumbv2/123dok/837243.590109/3.595.216.394.201.323/gambar-diagram-pengaturan-kecepatan-motor-induksi-dengan-ifoc.webp)