AMIR HAMZAH MUHIDDIN
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Dengan ini saya menyatakan bahwa disertasi Pemodelan Jaringan Saraf Tiruan (Artificial Neural Networks) Untuk Identifikasi Kawanan Lemuru Dengan Menggunakan Deskriptor Hidroakustik adalah karya sendiri dengan arahan komisi pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Bogor, April 2007
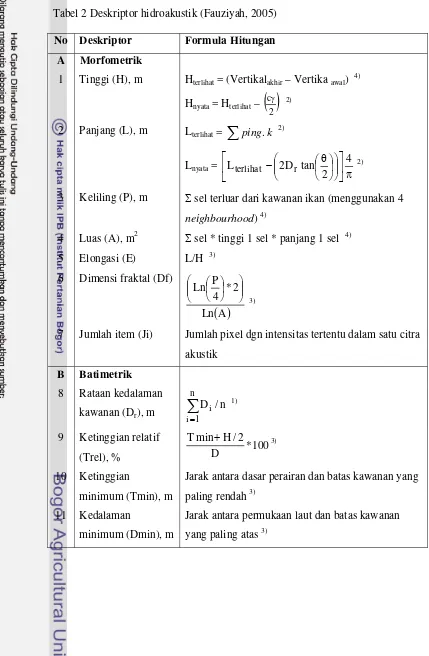
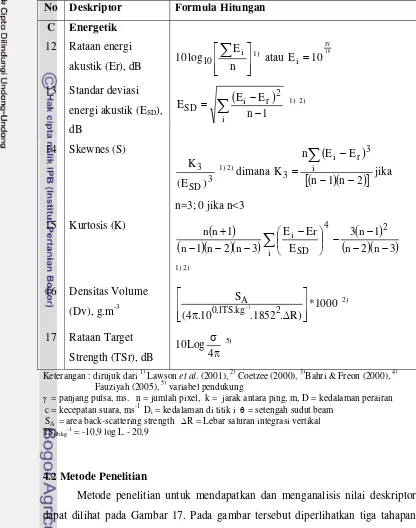
Dalam disertasi ini dilakukan pemodelan Jaringan Saraf Tiruan Perambatan Balik (JSTPB) untuk mengidentifikasi kawanan lemuru (Sardinella lemuru) dengan menggunakan deskriptor hidroakustik. Dalam pemodelan ini identifikasi dengan Metode Statistik Analisis Gerombol (Cluster Analysis) dan Metode Analisis Diskriminan (Descriminant Function Analysis) digunakan sebagai pembanding. Deskriptor hidroakustik yang digunakan terdiri dari 15 jenis deskriptor hidroakustik yang dikelompokkan kedalam kelompok deskriptor morfometrik, batimetrik, dan energetik. Ke-15 jenis deskriptor diekstrak dari 114 kawanan ikan dengan 58 diantaranya adalah kawanan ikan teridentifikasi (data latih) sedangkan 56 lainnya adalah kawanan ikan yang belum teridentifikasi (data uji).
Analisis gerombol dilakukan dengan 35 kawanan ikan data latih dan 56 kawanan ikan data uji dengan masing-masing 11 deskriptor, sedangkan analisis diskriminan dilakukan dengan 56 kawanan data uji yang sebelumnya telah diidentifikasi dengan analisis gerombol dan 15 deskriptor hidroakustik. Hasil analisis gerombol menunjukkan bahwa +89% dari 56 kawanan tersebut adalah kawanan lemuru (50 kawanan) dengan 4 spesies kawanan ikan yaitu kawanan lemuru (12 kawanan), protolan (15 kawanan), sempenit (16 kawanan), dan campuran (7 kawanan) sedangkan 11% sisanya (6 kawanan) adalah kawanan non-lemuru. Dengan analisis diskriminan, klasifikasi terhadap 56 kawanan ikan dapat dilakukan dengan ketepatan hingga 98,2%, hanya 1 spesies kawanan sempenit yang teridentifikasi sebagai kawanan campuran sedang ke-55 kawanan ikan lainnya dapat diklasifikasikan dengan benar. Dari hasil analisis ini didapatkan 8 deskriptor utama yaitu deskriptor panjang (L), tinggi (H), luas (A), keliling (P), elongasi (E) dari kelompok deskriptor morfometrik; deskriptor tinggi relatif (Trel) dari kelompok deskriptor batimetrik; dan deskriptor rataan energi hamburan balik (Er) dan densitas (Dv) dari kelompok deskriptor energetik.
dan JSTPB3 yaitu model dengan lapisan tersembunyi tunggal dengan 8 unit sel pada lapisan masukan dan 8 unit sel pada lapisan tersembunyi, sedangkan JSTPB2 menggunakan model jaringan 15(15-1) yaitu model jaringan dengan 15 unit sel masukan pada lapisan masukan dan 15 unit sel pada lapisan tersembunyi. Untuk mendapatkan hasil identifikasi yang optimal maka komposisi akhir data latih dan uji yang digunakan dalam Metode Jaringan Saraf Perambatan Balik adalah 80 pola data pada data latih dan 30 pola data pada data uji. Dengan komposisi data seperti yang disebutkan di atas, didapatkan ketepatan tingkat identifikasi masing-masing untuk JSTPB1 100%, JSTPB2 70%, JSTPB3 73,3% dengan jumlah hitungan iterasi masing-masing JSTPB1 10 kali iterasi, JSTPB2 32 kali iterasi, dan JSTPB3 14 kali iterasi. Hasil analisis kontribusi pareto pada JSTPB2 menunjukkan bahwa dari 15 jenis deskriptor yang digunakan, hanya kelompok deskriptor morfometrik dan energetik yang berperan besar dalam analisis ini. Kelompok deskriptor morfometrik yaitu; deskriptor keliling (P), panjang (L), luas(A), elongasi (E), dan tinggi (H), kelompok deskriptor energetik yaitu; kurtosis (K), skewness (S), dan intensitas hamburan balik (Er). Deskriptor-deskriptor ini selanjutnya digunakan sebagai Deskriptor-deskriptor masukan JSTPB3.
Dalam disertasi ini disimpulkan bahwa; (1) Metode Statistik dan Jaringan Saraf Tiruan Perambatan Balik dapat digunakan dengan baik untuk identifikasi dan klasifikasi kawanan ikan pelagis, (2) Dari kedua metode didapatkan bahwa Morfometrik kawanan ikan berperan lebih besar dalam proses identifikasi dan klasifikasi dibanding energetik dan batimetrik, (3) Model jaringan saraf yang ideal adalah 8(8-1) untuk JSTPB1 dan JSTPB3 serta 15(15-1) untuk JSTPB2, (4) Untuk mendapatkan tingkat ketepatan yang optimum maka data kawanan ikan yang akan diidentifikasi dengan metode ini maksimum berjumlah 35,7% dari total data latih yang tersedia.
(BPANN) model was used to identify schools of lemuru (Sardinella lemuru) utilizing hydroacoustic descriptors. Statistical methods of Cluster Analysis and Discriminant Function Analysis were used for comparison. Hydroacoustic descriptor approach categorized as morphometric, bathymetric, and energetic descriptors was performed by using 15 types of hydroacoustic descriptors. The 15-descriptor types were extracted from 114 fish schools echogram of which 58 were identified (training data) while the other 56 schools were unidentified (testing data).
Cluster analysis was performed on 35 fish school training data and 56 fish school testing data, each with 11 descriptors, while discriminant analysis was performed on 56 school testing data which had previously been identified with cluster analysis and 15 hydroacoustic descriptors. Results of cluster analysis showed that +89% of the 56 schools were lemuru (50 schools) with 4 fish species school namely lemuru (12 schools), protolan (15 schools), sempenit (16 schools), and combination (7 schools), while remaining 11% (6 schools) were non-lemuru schools. Using discriminant analysis, classification of 56 fish schools can be obtained with 98.2% accuracy; only 1 school of sempenit species was identified as combination of fish school, whereas the other 55 schools were correctly classified. Further, 8 key descriptors of the school were found, namely length (L), height (H), area (A), perimeter (P), Elongation (E) from morphometric descriptor category, Relative Altitude (Trel) from bathymetric descriptor category, and mean back-scattering energy (Er) and Density (Dv) from energetic descriptor category.
contribution analysis on BPANN2 showed that from 15 descriptor types used, only morphometric and energetic descriptor categories play major roles in this analysis. The descriptors from morphometric category were perimeter (P), length (L), area (A), elongation (E), and height (H), while descriptors from energetic category were kurtosis (K), skewness (S), and mean intensity of back-scattering (Er). These descriptors were then used as input descriptors for BPANN3.
In conclusion: 1) Statistical method and Back Propagation Neural Network can be well utilized to identify and classify pelagic fish schools, 2) Morphometric of fish schools played a larger role in identification and classification process compared to energetic and bathymetric, 3) Ideal neural network model was 8(8-1) for BPANN1 and BPANN3, and 15(15-1) for BPANN2, 4) In order to obtain optimum degree of accuracy, a maximum number of fish schools to be identified in the computation was 35.7% of total available training data.
© Hak cipta milik Institut Pertanian Bogor, tahun 2007
Hak cipta dilindungi Undang-undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber
a. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah
b. Pengutipan tidak merugikan kepentingan yang wajar IPB
PEMODELAN JARINGAN SARAF TIRUAN
(Artificial Neural Networks) UNTUK IDENTIFIKASI
KAWANAN LEMURU DENGAN MENGGUNAKAN
DESKRIPTOR HIDROAKUSTIK
AMIR HAMZAH MUHIDDIN
Disertasi
Sebagai salah satu syarat untuk memperoleh gelar Doktor pada
Departemen Pemanfaatan Sumberdaya Perikanan
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
NIM : C561024011 Program Studi : Teknologi Kelautan
Disetujui,
Komisi Pembimbing
Dr. Ir. Indra Jaya, MSc. Ketua
Dr. Ir. Totok Hestirianoto, MSc. Prof. Dr. Ir. Daniel R. Monintja
Anggota Anggota
Diketahui,
Program Studi Teknologi Kelautan Dekan Sekolah Pascasarjana IPB, Ketua,
Prof.Dr.Ir. John Haluan.MSc Prof. Dr.Ir.Khairil Anwar Notodiputro.MS
RIWAYAT HIDUP
Tiruan terhadap Metode Statistik menjadikan metode ini menarik untuk diteliti. Penulis mencoba mempelajari faktor-faktor yang berkaitan dengan penggunaan jaringan saraf tiruan dalam bidang perikanan.
Dengan selesainya penelitian dan tulisan disertasi ini, penulis menyampaikan ucapan terima kasih kepada Bapak Dr. Ir. Indra Jaya, Msc., sebagai ketua komisi pembimbing, Bapak Dr. Ir. Totok Hestirianoto, MSc., dan Bapak Prof. Dr. Ir. Daniel R. Monintja masing-masing sebagai anggota komisi pembimbing atas bimbingan, saran dan kritik yang diberikan selama masa penelitian dan penulisan disertasi ini. Khusus kepada Bapak Prof. Dr. Ir. Daniel R. Monintja penulis mengucapkan banyak terimakasih atas kemudahan yang diberikan kepada penulis sehingga penulis dapat langsung meneruskan pendidikan S2 ke S3 di PS.TKL IPB. Ucapan terima kasih juga disampaikan kepada Bapak Ir. Duto Nugroho, MSi.(Kepala BRPL-DKP), dan Dr. Ir. Bambang Sadatomo, MSc. (Peneliti senior BRPL-DKP) atas kesempatan yang diberikan untuk mengikuti pelayaran survey akustik jalur Semarang-Tarakan yang sangat berkesan bagi penulis dan juga atas bantuan data akustik yang diberikan.
Terima kasih juga penulis haturkan kepada rekan-rekan alumni ITB di BPPT, Dr. Ir. Ridwan Djamaluddin, M.Sc., Ir. Amarsyah di Departemen Kelautan dan Perikanan Gambir, dan rekan-rekan alumni ITB lainnya yang telah membantu menyediakan data survei akustik Selat Bali tahun 1998, 1999, 2000 yang penulis gunakan sebagai data penelitian dalam disertasi ini. Tidak lupa diucapkan terima kasih kepada kamerad Syaiful Akbar, David Pranata, Ultra Syahbunan, dan Arwin Lubis atas segala dukungan moral dan materil yang diberikan.
Kepada Rektor Universitas Hasanuddin, Rektor Institut Pertanian Bogor, dan Direktur Jenderal Pendidikan Tinggi Departemen Pendidikan Nasional diucapkan terima kasih atas kesempatan dan bantuan beasiswa yang diberikan selama penulis menempuh pendidikan di IPB.
Terakhir kepada kedua orang tua, anak (Dhila, Dayat, dan Iba), istri (Niar), dan saudara-saudara tercinta atas dukungan moral dan materil yang diberikan terus menerus penulis mengucapkan beribu terima kasih. Semoga seluruh bantuan yang diberikan bernilai ibadah dan diberikan balasan yang setimpal dari Allah SWT.
Bogor, April 2007
xii
DAFTAR LAMPIRAN
………...
xx
GLOSARI
………
xxi
1 PENDAHULUAN
………...
1
1.1 Latar Belakang ………....
1
1.2 Batasan Masalah ………...
3
1.3 Tujuan ………...
4
1.4 Manfaat Penelitian ………..
4
1.5 Hipotesis ………...
4
2 TINJAUAN PUSTAKA
………..………..
5
2.1 Jaringan Saraf Tiruan ………...
5
2.1.1 Sel saraf tiruan (a
rtificial neural
) ………...
7
2.1.2 Koneksitas sel saraf tiruan (
topology
) ………...
9
2.1.3
Aturan
pembelajaran
(
learning rule
) ………...
10
2.1.4 Arsitektur JST ………...
14
2.1.5 Aplikasi JST dalam bidang perikanan …...
18
2.2 Ikan Pelagis ...
22
2.2.1 Kawanan dan gerombolan ikan pelagis ...
22
2.2.2 Struktur kawanan ikan pelagis ...
25
2.2.3 Ukuran kawanan ikan pelagis ...
26
2.2.4 Bentuk kawanan ikan pelagis ...
27
3 METODOLOGI
...
31
3.1 Data Akustik ...
33
3.1.1 Pemrosesan data akustik ...
34
3.1.2 Data hasil tangkapan ...
35
xiii
3.3 Deskriptor
Akustik
...
37
3.4 Identifikasi, Klasifikasi dan Penentuan Deskriptor Utama dengan
Metode Statistik ...
37
3.5 Arsitektur JST ...
38
3.6 Rancangan Awal JST ...
39
3.7 Validasi Silang ...
39
3.8 Hasil Validasi Silang ...
39
4 DESKRIPTOR HIDROAKUSTIK KAWANAN IKAN PELAGIS
...
40
4.1 Pendahuluan ...
40
4.2 Metode Penelitian ...
43
4.3 Hasil ...
47
4.3.1 Analisis korelasi ...
48
4.3.2 Analisis komponen utama ...
55
4.4 Pembahasan ...
57
4.5 Kesimpulan ...
60
5 IDENTIFIKASI DAN KLASIFIKASI KAWANAN IKAN PELAGIS
DENGAN METODE STATISTIK
...
61
5.1 Pendahuluan ...
61
5.2 Metode Penelitian ...
62
5.3 Hasil ...
67
5.3.1 Analisis gerombol ...
67
5.3.2 Analisis diskriminan ...
72
5.4 Pembahasan ...
78
5.5 Kesimpulan ...
80
6 IDENTIFIKASI DAN KLASIFIKASI KAWANAN IKAN PELAGIS
DENGAN JARINGAN SARAF TIRUAN PERAMBATAN
BALIK
...
82
6.1 Pendahuluan ...
82
6.2 Metode Penelitian ...
83
6.2.1 Perancangan awal dan pelatihan JSTPB ...
85
6.2.2 Perancangan akhir dan uji coba JSTPB ...
91
6.3 Hasil ...
93
6.3.1 Hasil perancangan awal dan pelatihan JSTPB ...
93
6.3.2 Hasil perancangan akhir dan uji coba JSTPB ...
101
6.4 Pembahasan ...
110
xiv
DAFTAR PUSTAKA
...
121
xv
1
Contoh deskriptor yang digunakan untuk identifikasi
sardine
,
anchovy
,
dan
horse mackarel
(Haralabous & Georgakarakos, 1996) ………
21
2 Deskriptor
hidroakustik
(Fauziyah, 2005) ...
42
3
Rangkuman nilai rataan dan koefisien keragaman (kk dalam %)
deskriptor morfometrik kawanan ikan berdasarkan selang waktu
pengukuran ...
49
4
Matriks korelasi antar deskriptor morfometrik ...
49
5
Rangkuman nilai rataan dan koefisien keragaman (kk dalam %)
deskriptor batimetrik kawanan ikan berdasarkan selang waktu
pengukuran ...
51
6
Matriks korelasi antar deskriptor batimetrik ...
51
7
Rangkuman nilai rataan dan koefisien keragaman (kk dalam %)
deskriptor energetik kawanan ikan berdasarkan selang waktu
pengukuran ...
52
8
Matriks korelasi antar deskriptor energetik ...
52
9
Matriks korelasi antar deskriptor morfometrik, batimetrik, dan
energetik ...
54
10
Deskriptor hidroakustik untuk analisis statistik (Fauziyah, 2005) ...
63
11
Kelompok kawanan ikan hasil analisis gerombol ...
67
12
Hasil pengelompokan 56 kawanan ikan (data A) dengan Metode Analisis
Gerombol Terbimbing ...
71
13
Nilai rataan deskriptor pada masing-masing kelompok ...
73
14
Koefisien fungsi diskriminan dan struktur matriks fungsi ...
74
15
Eigenvalue dari kempat fungsi diskriminan ...
75
xvi
20
Hasil identifikasi dan klasifikasi dengan JSTPB1 ...
103
21
Hasil identifikasi dan klasifikasi dengan JSTPB2 ...
106
22
Deskriptor pada unit sel masukan JSTPB3 ... 107
23
Hasil identifikasi dan klasifikasi dengan JSTPB3 ...
109
xvii
Halaman
1
Jaringan sel saraf biologi ...
5
2
Sebual sel saraf dengan masukan tunggal ...
8
3
Sebuah sel saraf dengan r masukan ...
8
4
Pemrosesan umpan balik ...
9
5
Arsitektur JSTPB sederhana ...
12
6
JST dengan satu lapisan, dengan r masukan dan s buah sel saraf
... 14
7
Arsitektur JST umpan maju (
feed-forward
) dengan banyak lapisan ...
16
8
JST dengan banyak lapisan (
multi layer
) dengan r masukan dan s buah
sel saraf ...
17
9
Contoh deskriptor citra akustik kawanan ikan dengan intensitas
hamburan balik yang berbeda pada setiap titik pikselnya
... 20
10
Sardinella lemuru
Bleeker, 1853 (DKP) ...
24
11
Bentuk berlian dalam kawanan ikan (He, 1989) ...
26
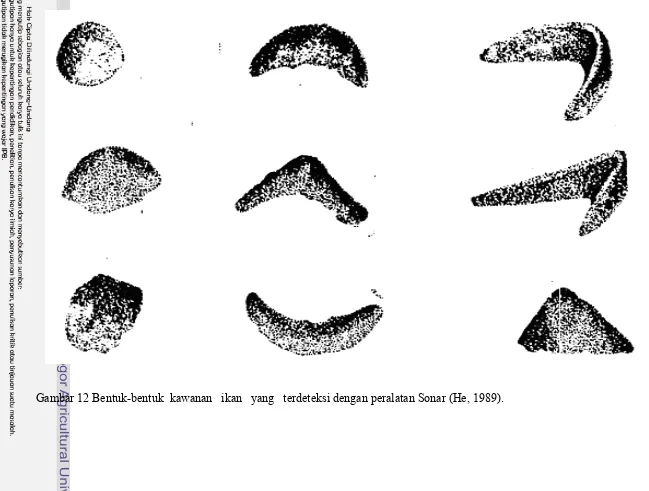
12
Bentuk-bentuk kawanan ikan yang terdeteksi dengan peralatan Sonar
(He, 1989) ...
28
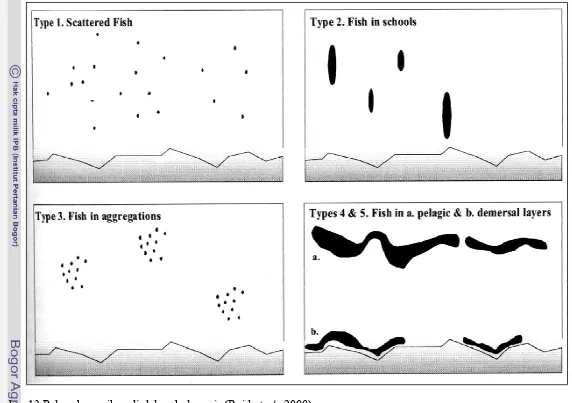
13
Pola sebaran ikan di dalam kolom air (Reid, 2000) ...
29
14
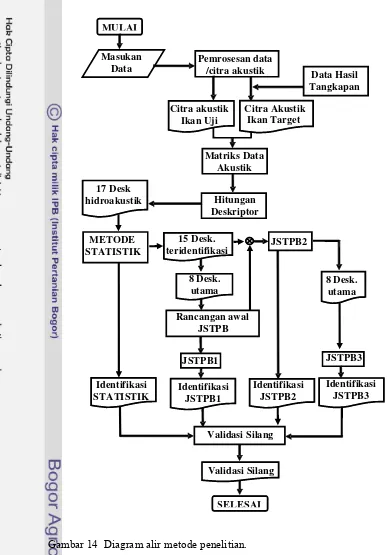
Diagram alir metode penelitian ...
32
15
Lintasan survei kapal Baruna Jaya IV di Selat Bali tahun 1998, 1999,
2000 ...
34
16 Deskriptor
hidroakustik
kawanan ikan pelagis ...
41
xviii
22
Contoh beberapa citra akustik kawanan ikan di Selat Bali ...
69
23
Posisi anggota kelompok kelima kawanan ikan terhadap fungsi
diskriminan 1 dan 2 ...
76
24
Karakteristik 8 deskriptor utama dari kelima kelompok kawanan ikan
... 78
25
Diagram alir proses perancangan hingga operasional JSTPB ...
84
26
Grafik fungsi aktivasi Sigmoid Bipolar dan Linier ...
87
27
Diagram alir algoritma jaringan ...
89
28
Grafik hasil pelatihan dengan jumlah unit sel masukan yang berbeda
(a) Jumlah unit masukan Vs Jumlah iterasi (b) Jumlah unit sel
masukan Vs MSE ...
95
29
Grafik hasil pelatihan dengan jumlah unit sel lapisan tersembunyi yang
berbeda (a) Jumlah unit sel tersembunyi Vs Jumlah iterasi (b) Jumlah
unit sel tersembunyi Vs MSE ...
96
30
Grafik hasil pelatihan berdasarkan arsitektur jaringan yang berbeda
dengan fungsi aktivasi
tansig-purelin
(a) Model JSTPB Vs Jumlah
iterasi (b) Model JSTPB Vs MSE ...
98
31
Grafik hasil pelatihan dengan jumlah pola masukan yang berbeda (a)
Jumlah pola masukan Vs Jumlah iterasi (b) Jumlah pola masukan Vs
MSE ... 100
32
Hasil simulasi data uji model JSTPB1 dengan arsitektur 8(8-1) dengan
Metode Pelatihan Levenberg-Marquard ... 103
xix
Pelatihan Levenberg-Marquard ...
105
35
Diagram Pareto JSTPB2 ... 106
36
Hasil simulasi data uji model JSTPB3 8(8-1) dengan Metode Pelatihan
Levenberg-Marquard ... 108
xx
4 Histogram deskriptor hidroakustik data latih ... 129
5 Data uji mentah ...
133
6 Data uji dalam bentuk logaritmik ... 134
7 Data uji dalam bentuk z-score ... 135
8 Data uji dalam bentuk bipolar ... 136
9 Histogram deskriptor hidroakustik data uji ... 137
10 Hasil analisis gerombol ... 142
11 Hasil analisis diskriminan ...
144
12 Hasil hitungan JSTPB1 ...
152
13 Hasil hitungan JSTPB2 ...
154
14 Hasil hitungan JSTPB3 ...
158
15 Jumlah iterasi Vs ketepatan dari seluruh model JSTPB1 ... 160
16 Jumlah iterasi Vs ketepatan dari seluruh model JSTPB2 ... 161
17 Jumlah iterasi Vs ketepatan dari seluruh model JSTPB3 ... 162
18 Deskripsi, sebaran, dan produksi lemuru ...
163
xxi
DAFTAR ISTILAH
Akustik
(
acoustics
)
= Ilmu tentang suara yang mempelajari sifat perambatan
suara di dalam suatu medium.
Arsitektur
(
architecture
)
= Deskripsi tentang jumlah sel, lapisan tersembunyi, fungsi
aktivasi, dan koneksi antar lapisan.
Bias
= Parameter sel saraf yang ditambahkan ke masukan
terbobot yang selanjutnya diproses oleh fungsi aktivasi.
Bobot (
weight
)
= Besaran pengali yang berfungsi menguatkan atau
melemahkan masukan yang diberikan kedalam sebuah sel
saraf.
Citra akustik
(
echogram
)
= Rekaman dari rangkaian gema yang divisualisasikan.
Deskriptor
(
descriptor
)
= Variabel atau peubah yang menggambarkan ciri atau sifat
dari pantulan akustik, baik berupa morfometrik,
batimetrik, dan energetik.
Fungsi aktivasi
(
activation function
)
= Fungsi aktivasi adalah fungsi yang secara spesifik
menentukan langkah yang harus dilakukan oleh sebuah
sel setelah sel tersebut menerima sinyal terbobot.
Gema (
echo
)
= Gelombang suara yang dipantulkan obyek.
Gerombolan
(
shoaling
)
= Kelompok ikan yang terdiri dari beberapa kawanan ikan,
bersifat tidak homogen, dan memiliki karakteristik
masing-masing.
Hamburan balik
(
backscattering
)
= Jumlah energi per satuan waktu yang dipantulkan oleh
target selama transmisi suara dari
transducer
.
Iterasi (
epoch
)
= Pengulangan yang dilakukan untuk pemrosesan data.
Jaringan saraf tiruan
(
artificial neural
networks
)
xxii
(
schooling
)
tersinkronisasi dan terpolarisasi ketika beruaya.
Kekuatan target
(
target strength
)
= Rasio intensitas gema yang diukur pada jarak 1m dari
permukaan transducer dengan intensitas yang datang
mengenai target.
Klasifikasi
(
classification
)
= Asosiasi antar vektor masukan dan vektor target.
Lemuru campuran
= Kawanan ikan yang tercampur yang terdiri dari sempenit,
protolan, dan lemuru.
Lemuru protolan
= Lemuru yang berukuran panjang total antara 11-15cm.
Lemuru sempenit
= Lemuru yang berukuran panjang total kurang dari 11cm.
Pelatihan (
training
)
= Proses yang dilakukan terhadap setiap masukan terbobot
dan bias agar jaringan mencapai kondisi tertentu yang
diinginkan.
Perambatan balik
(
back propagation
)
= Metode
pelatihan
terbimbing
dimana galat di rambatkan
balik ke lapisan dibawahnya dengan terlebih dahulu diberi
bobot.
Perceptron =
Jaringan
lapisan
tunggal dengan fungsi aktivasi biner.
xxiii
(
bathymetric
)
Dimensi fraktal
(
fractal dimension
)
= Bangun dengan dimensi bukan bilangan bulat.
Elongasi
(
elongation
)
= Rasio antara panjang dan tinggi kawanan
Energetik
(
energetic
)
= Sifat internal kawanan dilihat dari pancaran energinya.
Kedalaman
minimum (
minimum
depth
)
= Jarak terdekat antara permukaan laut dengan kawanan.
Ketinggian
minimum (
minimum
altitude
)
= Jarak terdekat antara dasar perairan dengan kawanan.
Ketinggian relatif
(
relative altitude
)
= Rasio antara rataan ketinggian kawanan dengan
kedalaman perairan (%)
Kurtosis
= Ukuran yang digunakan dalam menentukan ekor dan
puncak suatu sebaran.
Luas
= Total pixel dalam citra akustik kawanan ikan.
Panjang (
length
)
= Jarak antar pixel terdepan dan terbelakang dari kawanan.
Rataan energi
akustik (
mean
acoustic energy
)
= Energi akustik dari pixel atau
backscattering cross
section
.
Rataan kedalaman
(
mean depth
)
= Jarak dari permukaan laut ke titik tengah kawanan.
Skewness
= Kemenjuluran, menyatakan sifat sebaran terhadap nilai
rataannya.
xxiv
1.1 Latar Belakang
Pengembangan metode identifikasi dan klasifikasi spesies kawanan ikan berdasarkan data hidroakustik merupakan salah satu kunci penurunan tingkat kesalahan dalam pendugaan biomassa (Haralabous & Georgakarakos, 1996). Selama ini, identifikasi dan klasifikasi spesies kawanan ikan berdasarkan data
hidroakustik dilakukan dengan menggunakan metode echo counting, echo
integrations, echosounder mapping, dan sonar mapping. Identifikasi spesies ikan dengan keempat metode ini dilakukan dengan menganalisis karakteristik sinyal hamburan balik (echo backscattered) dari kawanan ikan tertentu. Hasil analisis sinyal akustik selanjutnya dibandingkan dengan data spesies ikan yang tertangkap pada saat sampling dilakukan. Pengambilan contoh spesies ikan dapat dilakukan
dengan metode trawling dan dilakukan pada saat yang bersamaan dengan
pengambilan data hidroakustik. Sementara itu, identifikasi dan klasifikasi data hidroakustik dengan keempat metode ini umumnya dilakukan dengan Metode
Statistik Analisis Komponen Utama (Principal Component Analysis, PCA),
Analisis Gerombol (Cluster Analysis, CA), dan Analisis Diskriminan
(Discriminant Function Analysis, DFA) sebagaimana yang dilakukan oleh Lu & Lee (1995), Weill et al. (1993), Haralabous & Georgakarakos (1996), Coetzee (2000), Simmonds et al. (1996), dan Lawson et al. (2001). Berdasarkan hasil identifikasi dan klasifikasi tersebut, pendugaan biomassa dari spesies kawanan ikan tertentu dilakukan.
menganalisis sekumpulan parameter kuantitatif dari data sinyal hamburan balik yang bersifat unik, yang dapat membedakan secara efisien struktur dari kawanan ikan pelagis yang berbeda (Diner et al., 1989; Georgakarakos & Paterakis, 1993) atau dari populasi akustik (Gerlotto & Frĕon, 1988; Lu & Lee, 1995). Dengan demikian estimasi stok biomassa dari setiap spesies dilihat dari kawanannya dan penangkapan ikan yang lebih selektif secara ekonomis dan berkelanjutan dimungkinkan untuk dilakukan (Marchal & Petitgas, 1993; Cochrane et al., 1998). Salah satu metode identifikasi yang dapat digunakan dan sedang dikembangkan saat ini adalah metode identifikasi dan klasifikasi dengan Jaringan Saraf Tiruan (artificial neural networks), yang selanjutnya disingkat JST.
JST merupakan suatu struktur komputasi yang dikembangkan dari sistem pemrosesan informasi pada jaringan sel saraf manusia (Lawrence, 1992). JST memiliki kemampuan dasar untuk mempelajari contoh masukan dan keluaran yang diberikan, kemudian berdasarkan masukan dan keluaran tersebut, sistem ini berlatih beradaptasi dengan lingkungan (Kusumadewi, 2004). Penggunaan JST dalam identifikasi dan klasifikasi spesies kawanan ikan dilakukan dengan memberikan masukan berupa parameter kuantitatif yang bersifat unik yang diambil dari pola-pola sinyal hamburan balik dari spesies kawanan ikan target yaitu kawanan ikan yang sudah teridentifikasi secara hidroakustik dan menjadi objek penelitian. Parameter yang unik tersebut dijadikan sebagai parameter pembanding untuk mengidentifikasi dan mengklasifikasi kawanan ikan pelagis lainnya. Penggunaan JST untuk identifikasi kawanan ikan telah dilakukan oleh Jaya & Sriyasa (2004) dengan hasil yang cukup menjanjikan walaupun dengan data pelatihan terbatas.
sebagaimana halnya yang dilakukan pada metode konvensional (Haralabous & Georgakarakos, 1996). Dengan demikian, identifikasi dan klasifikasi dengan jaringan sel saraf tiruan selain dapat dilakukan dengan cepat, dapat memperkecil peluang terjadinya kesalahan identifikasi akibat kesalahan manusia, dapat menekan biaya operasi, dan dapat juga digunakan secara bebas pada situasi dan kondisi apapun karena tidak memerlukan asumsi-asumsi yang berkaitan dengan distribusi ikan.
1.2 Batasan Masalah
Penelitian ini akan membahas tentang penggunaan Metode Jaringan Saraf
Tiruan Perambatan Balik (feed-forward back propagation neural networks)
selanjutnya disingkat JSTPB dan Metode Analisis Statistik untuk
mengidentifikasi dan mengklasifikasi spesies kawanan ikan pelagis dengan menjadikan spesies kawanan ikan lemuru (Sardinella lemuru) sebagai spesies kawanan ikan target dan ikan uji.
JSTPB yang akan digunakan adalah JSTPB dengan struktur lapisan tunggal dan banyak lapisan. JSTPB dengan lapisan tunggal (single-layer) tersusun dari satu lapisan masukan (input layer), satu lapisan tersembunyi (hidden layer), dan satu lapisan keluaran (output layer), sedangkan struktur JSTPB dengan banyak lapisan (multi layers) terdiri dari satu lapisan masukan (input layer), beberapa lapisan tersembunyi (hidden layer), dan satu lapisan keluaran (output layer).
Parameter pembanding yang akan digunakan dan selanjutnya disebut
deskriptor adalah parameter yang telah dikembangkan sebelumnya oleh Coetzee (2000), Bahri & Frĕon (2000), Lawson et al. (2001); Fauziyah (2005).
Penelitian ini mencoba menjawab beberapa pertanyaan yang telah dikemukakan oleh peneliti sebelumnya yang berkaitan dengan:
(1) Pemilihan deskriptor yang dapat secara efisien digunakan untuk
mengidentifikasi kawanan ikan target (Lu & Lee, 1995).
(2) Perancangan arsitektur JST yang baik yang dapat digunakan untuk
1.3 Tujuan
Mengembangkan penggunaan Metode JST untuk identifikasi kawanan pelagis guna meningkatkan kecepatan dan ketelitian metode tersebut. Hal ini dilakukan dengan cara menentukan struktur JST, deskriptor, dan jumlah data pelatihan yang minimal yang dapat memberikan hasil identifikasi dengan ketelitian yang maksimal.
1.4 Manfaat Penelitian
Penelitian ini dapat memberikan manfaat yang besar dalam meningkatkan efisiensi dalam pemanfaatan waktu, dana, dan meningkatkan ketepatan dalam melakukan identifikasi dan klasifikasi spesies kawanan ikan.
1.5 Hipotesis
Kecepatan dan ketelitian identifikasi kawanan spesies ikan pelagis dengan Metode JST dapat ditingkatkan dengan:
(1) Menentukan deskriptor hidroakustik yang paling berperan untuk dijadikan dasar identifikasi kawanan ikan pelagis,
(2) Menentukan dengan tepat jumlah sel saraf dan lapisan tersembunyi yang dibutuhkan untuk identifikasi kawanan ikan pelagis,
(3) Menentukan jumlah data pelatihan yang minimal yang dapat menghasilkan ketelitian yang memadai.
2.1 Jaringan Saraf Tiruan
[image:30.612.93.474.90.740.2]Jaringan saraf manusia tersusun atas 1010 sel saraf yang masing-masing selnya tersambung dengan 103 hingga 105 sel saraf. membentuk suatu jaringan yang sangat kompleks (Rumelhard & McLelland, 1986 yang diacu Storbeck & Daan, 2001). Gambar 1 memperlihatkan beberapa bagian sel saraf seperti inti sel, badan sel, dendron, dendrit, akson, serta sinapsis.
Gambar 1 Jaringan sel saraf biologi (Artificial Neural Networks in Medicine
http://www.MedicineNet.org,15 Juli 2005).
Hubungan antara sel saraf bukan hanya sekedar bersifat on dan off saja, melainkan memiliki bobot (weight) yang bervariasi yang juga menentukan besar kecilnya pengaruh suatu sel saraf terhadap sel saraf berikutnya (Lawrence, 1992). Selain itu banyak proses pada fungsi otak manusia khususnya proses berlatih yang berkaitan erat dengan bobot hubungan antar sel saraf yang bervariasi tersebut. Sebagai pusat pemrosesan data, aktivitas otak dapat digambarkan sebagai pola aktivitas perjalanan impuls pada jaringan sel saraf (firing) yang khas, dan kerja sama sel saraf secara simultan inilah yang menyebabkan otak manusia mempunyai daya komputasi yang menakjubkan. Untuk menciptakan daya komputasi yang menakjubkan tersebut maka diciptakanlah JST yang diharapkan dapat bekerja sebagaimana bekerjanya jaringan saraf manusia. Jaringan saraf ini selanjutnya disebut Jaringan Saraf Tiruan (Artificial Neural Networks). Oleh beberapa ahli JST didefinisikan sebagai berikut;
(1) JST adalah jaringan kerja yang tersusun dari sejumlah elemen-elemen komputasi yang bersifat non-linier yang dioperasikan dan dirancang sebagaimana layaknya struktur saraf biologi. Elemen komputasi atau node dihubungkan satu sama lain berdasarkan bobot tertentu yang dapat beradaptasi dengan kondisi tertentu (Kosko, 1992).
(2) JST adalah jaringan kerja yang terbentuk oleh sejumlah sel saraf yang terhubung dengan cara yang sama seperti sel saraf otak biologi dan karenanya dapat bekerja sebagaimana bekerjanya sel saraf biologi. Jaringan sel-sel saraf yang terhubung dengan baik tadi dapat bekerja secara paralel dalam mengolah informasi (Lawrence, 1992).
(3) JST adalah sistem pemrosesan informasi yang menyerupai struktur
kemampuan sama atau lebih baik dari kemampuan sel saraf itu sendiri (Reid et al., 2000).
Dengan demikian diharapkan JST dapat bekerja lebih cepat dan akurat dalam pemrosesan informasi dibandingkan dengan jaringan saraf biologi dan dapat beradaptasi dengan dinamika informasi yang diterimanya sebagai mana hal tersebut terjadi pada sel saraf biologi (Vemuri, 1990). Dari definisi tentang JST seperti yang disebutkan diatas maka dapat disimpulkan bahwa;
(1) JST adalah jaringan kerja komputasi yang mencoba meniru kerja saraf biologi.
(2) Struktur JST menyerupai struktur saraf biologi.
(3) Pemerosesan informasi pada setiap simpul saraf dilakukan secara paralel. (4) Setiap simpul saraf pada dasarnya adalah model matematis yang dapat
digunakan untuk memproses setiap informasi yang masuk.
JST telah diaplikasikan pada beberapa bidang kegiatan seperti Pertahanan & Keamanan (Militer) untuk pembuatan simulator pesawat tempur yang digunakan untuk melatih pilot-pilot baru pesawat tempur Angkatan Udara Amerika (US Air Force) dan deteksi bom di sejumlah terminal pesawat TWA, bidang Kesehatan untuk membantu dokter dalam menganalisis kemajuan kesehatan pasien di rumah-rumah sakit, bidang Industri Perminyakan untuk mengidentifikasi tipe batuan yang ditemukan pada lubang-lubang eksplorasi
minyak, dan bidang Transportasi untuk digunakan dalam merancang sistem
pengereman pada kendaraan truk raksasa yang digunakan di Amerika (Lawrence, 1992). Selain itu, oleh Federal Bureau of Investigation (FBI), JST juga sudah digunakan untuk melakukan identifikasi dan klasifikasi tanda tangan, wajah, sidik jari dan DNA seseorang (Kosko, 1992). Ada beberapa jenis sistem JST, tetapi pada dasarnya semua sistem JST dapat dipelajari dari sel saraf tiruan, koneksitas sel saraf tiruan (topology), dan aturan pembelajarannya (learning rule).
2.1.1 Sel saraf tiruan (artificial neural)
dengan besarnya nilai bobot yang diberikan.
Gambar 2 Sebuah sel saraf dengan masukan tunggal.
Gambar 2 memperlihatkan sebuah sel saraf tiruan dengan masukan tunggal. Setiap sel saraf dengan masukan tunggal atau jamak selalu memiliki parameter-parameter masukan I, bobot W, bias b, masukan murni n dan fungsi transfer F, serta keluaran yang berupa skalar O.
Gambar 3 Sebuah sel saraf dengan r masukan.
[
]
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ) I( . . . I(2) I(1) ) (1, ..., (1,2), (1,1), I * r r W W WW ………… (1)
Masukan berbobot W*I ini merupakan hasil perkalian antara vektor baris W dan vektor kolom I, sedangkan masukan murni (net input, n) untuk fungsi transfer F diperoleh melalui penjumlahan masukan berbobot W*I dengan bias b sehingga n = W*I + b. Bias adalah sebuah parameter saraf yang ditambahkan ke masukan yang sudah terbobot dan melewati fungsi aktivasi untuk mengaktivkan keluaran sel.
2.1.2 Koneksitas sel saraf tiruan (topology)
Koneksitas diantara sel saraf tiruan merupakan bentuk komunikasi yang unik yang terjadi dari sebuah sel saraf tiruan pengirim sinyal ke sebuah sel saraf tiruan penerima sinyal. Koneksi yang terjadi diantara sel-sel saraf tiruan tersebut akan menentukan tipe pemrosesan yang akan terjadi dalam suatu JST. Sebagai contoh, jika terjadi koneksi antara keluaran sel saraf tiruan yang satu dengan bagian masukan pada sel saraf tiruan sebelumnya maka tipe pemrosesan yang terjadi adalah tipe pemrosesan umpan balik (feedback).
target
I K/M
pembaruan bobot O
Gambar 4 Pemrosesan umpan balik.
Dengan O adalah keluaran dan I adalah masukan. Dilihat dari sifatnya, bentuk koneksi yang terjadi diantara sel saraf tiruan dapat bersifat inhibitory
sel saraf awal
sel saraf tiruan lain yang ada pada lapisan berikutnya.
2.1.3 Aturan pembelajaran (learning rule)
Aturan pembelajaran pada dasarnya digunakan untuk menentukan perubahan nilai bobot (W) yang optimum yang dapat memperkecil galat. Hal ini
dilakukan dengan cara memberikan nilai koreksi bobot (ΔW) pada bobot
sebelumnya sehingga bobot yang baru (W ) akan bernilai W+ΔW. Dari sejumlah aturan pembelajaran yang ada, aturan pembelajaran yang umum digunakan pada sebuah jaringan sel saraf tiruan adalah Aturan Hebb (Hebb’s Rule), Aturan Delta (Delta Rule), dan Aturan Perambatan Balik (Back Propagation Rule).
1) Aturan Hebb (Hebb’s Rule)
Donald O Hebb yang diacu Lawrence (1992) mengemukakan teori bahwa sistem penyimpanan memori maupun pemrosesan informasi manusia berkaitan dengan kualitas koneksi dari sel sinaptic yang merupakan jembatan penghubung antara dua sel saraf. Dua sel saraf disebut terkoneksi dengan baik jika proses pengiriman dan penerimaan impuls diantara keduanya berlangsung dengan cepat. Proses yang demikian dapat terjadi jika pembelajaran dalam pengiriman, dan penerimaan impuls berlangsung secara terus menerus. Secara alami hal ini berakibat pada perubahan beberapa komposisi kimia yang selalu menyertai proses pengiriman dan penerimaan impuls. Secara matematis Teori Hebb dituliskan sebagai berikut;
j i j
i η a o
ΔW = ………. (2)
akibat proses pembelajaran atau berapa cepat jaringan dapat beradaptasi dengan perubahan yang terjadi. Lawrence (1992) mengemukakan bahwa jika dalam proses ini perubahan terjadi secara dramatis maka jaringan dapat bereaksi secara berlebihan dan berakibat pada lamanya proses pembelajaran berlangsung bahkan lebih dari itu dapat berakibat jaringan tidak dapat melakukan proses pembelajaran dengan baik.
2) Aturan Delta (Delta Rule)
Aturan Delta merupakan variasi dari Aturan Hebb untuk jaringan dengan lapisan sel saraf tersembunyi. Aturan Delta disebut juga Rerata Kuadrat Terkecil (Least Mean Square/LMS) yang merupakan variasi dari Aturan Hebb. Aturan ini ditemukan oleh Bernard Widrow dan Ted Hoff dari Universitas Stanford tahun 1960 (Lawrence, 1992). Jaringan penemuan mereka dinamakan ADAptive LINear Element (ADALINE). Aturan ini menyebutkan bahwa jika terdapat perbedaan antara keluaran yang dihasilkan dengan keluaran yang diinginkan maka untuk memperkecil perbedaan tersebut harus dilakukan perubahan pada bobot koneksi. Secara matematis besarnya perubahan bobot dapat dituliskan sebagai berikut:
(t) O (t)) a (t) (T η ij Δ j i i − =
W ………..… (3)
dimana ΔWij adalah perubahan bobot koneksi antara sel saraf ke-j ke sel saraf ke- i, Ti(t) adalah hasil yang diharapkan, ai(t) adalah hasil yang didapatkan sel saraf i, Oj adalah keluaran dari sel saraf j, t adalah waktu spesifik, dan η adalah laju pembelajaran.
3) Aturan Perambatan Balik (Back Propagation Rule)
Lap. Masukan Lap. Tersembunyi Lap. Keluaran
Gambar 5 Arsitektur JSTPB sederhana.
Jika dalam proses pembelajaran terdapat N pasang data masukan (I) dan keluaran yang diharapkan (O) yang diberi indeks p (p = 1,2,3,…N) dari target yang teridentifikasi maka galat oleh sel saraf tunggal ke-i dari pasangan data ke-p adalah;
2 pi pi 2 1
pi (O O )
E = − ……… (4)
dengan Opi adalah keluaran yang dihasilkan oleh sel saraf ke-i untuk pasangan data ke-p. Sehingga total galat oleh seluruh sel saraf pada satu lapisan adalah;
∑
−= i
2 pi pi 2 1
pi (O O )
E ……….. (5)
dan total galat yang dihasilkan oleh seluruh sel saraf untuk seluruh pasangan data pembelajaran p sebanyak N pasangan adalah;
∑ ∑
−= p i 2
pi pi 2
1 (O O )
E ………...… (6)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ∗ = ij pi ij p W δ δE η W
Δ ... (7)
karena E fungsi dari A dan A fungsi dari W maka;
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = ij pi pi pi ij pi W δ δA δA δE W δ δE
dan =
∑
p ij pi
ij δW
δE W
δ δE
karena =
∑
∗j ij pj
pi W O
A (fungsi aktivasi sel saraf ke-i pada pasangan data
ke-p) maka pj
ij pi O W δ δA
= (keluaran sel saraf ke-j dari pasangan data ke-p).
Jika pi
pi pi δ δA δE = −
maka ⎟⎟
⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ∗ = ij pi pi pi ij p W δ δA δA δE η W
Δ sehingga,
pj pi ij
pW η δ O
Δ = ∗ ∗ ... (8)
karena ⎟⎟
⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = pi pi pi pi pi pi δA δO δO δE δA δE
danOpi =f(Api)sehingga
) (A ' f δO δE δ pi pi pi
pi ⎟⎟
⎠ ⎞ ⎜ ⎜ ⎝ ⎛ −
= ………... (9)
jika I terletak pada lapisan keluaran maka
pi pi
δO δE
dapat dihitung langsung dari
persamaan (4) dan didapatkan (O O )
δO δE
pi pi pi
pi =− −
.
Karena O f(A )
pi
pi = , dA
df δA δO
pi pi =
sehingga δpi dari sel saraf dilapisan keluaran
menjadi
(
O O)
f'(A )k
dimana indeks k menunjukkan sel saraf ke-k pada lapisan sebelumnya. Dengan aturan ini maka galat yang diperoleh di lapisan atas dari pasangan data masukan dan keluaran dari pola-pola yang sudah teridentifikasi selanjutnya dikirimkan balik ke lapisan dibawahnya dengan tujuan untuk menghitung koreksi bobot koneksi antara sel saraf sesuai dengan persamaan (8).
2.1.4 Arsitektur JST
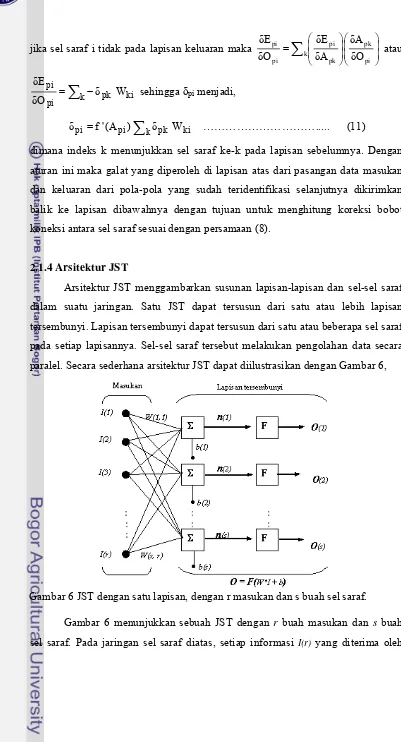
Arsitektur JST menggambarkan susunan lapisan-lapisan dan sel-sel saraf dalam suatu jaringan. Satu JST dapat tersusun dari satu atau lebih lapisan tersembunyi. Lapisan tersembunyi dapat tersusun dari satu atau beberapa sel saraf pada setiap lapisannya. Sel-sel saraf tersebut melakukan pengolahan data secara paralel. Secara sederhana arsitektur JST dapat diilustrasikan dengan Gambar 6,
[image:39.612.103.504.50.792.2]Gambar 6 JST dengan satu lapisan, dengan r masukan dan s buah sel saraf.
sebuah sel saraf baik dari satu atau beberapa sel saraf sebelumnya, akan diolah dengan terlebih dahulu diberi bobot tertentu dimana W(s, r) yang menyatakan bobot dari sel saraf ke-r yang diterima oleh sel saraf ke-s. Keluaran yang dihasilkan oleh sebuah sel saraf ke-s, O(s), akan merupakan fungsi nilai total dari seluruh informasi yang diterima yang dinyatakan dengan F(W*I + b). Fungsi ini merupakan fungsi transfer yang dapat dinyatakan dalam bentuk fungsi linier ataupun fungsi dengan bentuk yang lebih kompleks. Fungsi ini dikenal juga dengan sebutan fungsi aktivasi. Ada beberapa jenis fungsi aktivasi yang dapat digunakan dalam JST seperti fungsi bipolar, linier, sigmoid dan sebagainya. Dalam kaitannya dengan keakuratan hasil identifikasi maka keakuratan dalam pemberian nilai bobot pada setiap sambungan akan menentukan hasil identifikasi dari model JST yang digunakan. Matriks bobot dari masukan I ke sel saraf dapat ditulis sebagai berikut:
W(1,1) W(1,2) • • • W(1,r) W(2,1) W(2,2) • • • W(1,r) W = • • • • • • • • • • • • • • • • • • W(s,1) W(s,2) • • • W(s,r)
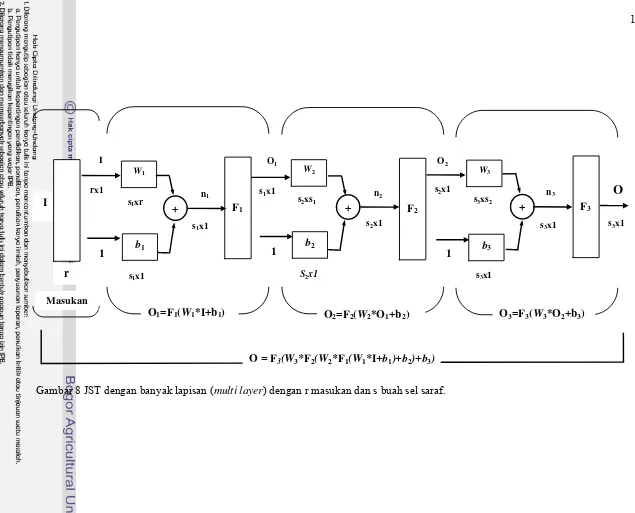
Lapisan Masukan j Lapisan Tersembunyi i & k Lapisan Keluaran l
I
Gambar 8 JST dengan banyak lapisan (multi layer) dengan r masukan dan s buah sel saraf.
O = F3(W3*F2(W2*F1(W1*I+b1)+b2)+b3)
s1x1 S2x1 s3x1
F1 F3
W1
b2 W2
b1
rx1
F2
b3 W3
+
+ +
n3
n2
n1
O
s3x1
s2x1
s1x1 s3x1
1 1 1
s3xs2
s2xs1
s1xr
s1x1 s2x1
I O1 O2
r
O1=F1(W1*I+b1) O2=F2(W2*O1+b2) O3=F3(W3*O2+b3)
setiap spesies kawanan ikan mempunyai tingkah laku yang berbeda, dan secara
fisiologis memiliki struktur tubuh yang berbeda yang pada akhirnya berdampak pada
tipologi akustik yang berbeda pula (MacLennan & Simmons, 1992). Karena itu,
masing-masing spesies kawanan ikan akan memberikan informasi yang unik baik
yang bersifat internal maupun external (Lu & Lee, 1995). Oleh Lawson
et al
., 2001;
Bahri & Freon, 2000; Reid
et al
., 2000., informasi yang unik ini disebut deskriptor
akustik kawanan ikan. Haralabous & Georgakarakos (1996) menegaskan bahwa
deskriptor akustik dapat digunakan sebagai pembeda antara spesies kawanan ikan
tertentu dengan spesies kawanan ikan lainnya.
Oleh Reid
et al
. (2000) metode ekstraksi deskriptor hidroakustik kawanan
ikan dikelompokkan kedalam tiga tingkatan ekstraksi yang berbeda yang didasarkan
pada:
(1) Tingkatan kawanan (
the school level
), deskriptor-deskriptor didapatkan dari
hasil ekstraksi data citra akustik yang dilakukan melalui pemrosesan citra
akustik dari masing-masing kawanan ikan.
(2) Tingkatan satuan elemen jarak contoh (
the element distance sampling unit,
EDSU
), deskriptor-deskriptor didapatkan dari sekumpulan citra akustik yang
terukur dari satu satuan jarak contoh yang ditetapkan sebelum survei
dilakukan.
(3) Tingkatan wilayah (
the region level
), deskriptor-deskriptor diambil dari suatu
hasil survei yang dilakukan pada suatu area yang sangat luas yang dilakukan,
Deskriptor-dekriptor tersebut selanjutnya dikelompokkan kedalam lima kawanan
deskriptor utama (Reid
et al
., 2000), yaitu:
(1)
Positional Descriptors
, deskriptor yang menjelaskan posisi kawanan ikan
yang dinyatakan dalam lintang, bujur (posisi horizontal), dan kedalaman
(posisi vertikal, jarak dari permukaan ke titik tengah kawanan ikan), posisi
awal dan akhir pixel pada arah vertikal dan horizontal.
(2)
Morphometric Descriptors
, deskriptor yang menjelaskan tentang morfologi
dari kawanan ikan target yang mencakup tinggi, lebar, ketebalan, rataan
lintang, rataan bujur, rataan kedalaman, perimeter kawanan ikan dan
kekasarannya.
(3)
Energetic Descriptors
, deskriptor yang menjelaskan tentang total energi
akustik, nilai rataan dan variabilitas energi akustik dari setiap pixel, dan pusat
massa kawanan ikan.
(4)
School Environment Descriptors
, deskriptor yang menjelaskan tentang jarak
terpendek dan terjauh antara perimeter kawanan ikan dengan dasar perairan.
(5)
Biological Descriptors
, deskriptor yang menjelaskan sifat-sifat unik dari
Gambar 9 Contoh deskriptor citra akustik kawanan ikan dengan intensitas hamburan
balik yang berbeda pada setiap titik pikselnya.
Pada Gambar 9 tampak beberapa deskriptor akustik batimetrik dan
morfometrik dari kawanan ikan seperti deskriptor rataan kedalaman kawanan (Dr),
kedalaman minimum kawanan (Dmin), ketinggian minimum kawanan dari dasar
perairan (Tmin), tinggi kawanan (H), dan panjang kawanan (L). Berikut ini adalah
beberapa contoh deskriptor yang digunakan untuk mengidentifikasi spesies kawanan
Tabel 1 Contoh deskriptor yang digunakan untuk identifikasi
sardine
,
anchovy
, dan
horse mackarel
(Haralabous & Georgakarakos, 1996)
Deskriptor
Simbol & Persamaan
Satuan
General
Species Id
SPE
Morphological
Height
H
m
Length
L
m
Perimeter
P
m
Area
A
m
2Elongation
L/H
Circularity
P
2/4
π
A
Rectangularity
(LH)/A
Radius of perimeter
Rmean, Rmin, Rmax, Rcv
m
Fractal dimension
2[ln(P/4)]/ln(A)
Bathymetric
School depth
Dmean, Dmin, Dmax
m
Bottom depth
Bmean, Bmin, Bmax
m
Altitude
Amean, Amin, Amax
M
Energetic
Total school energy
E
V
2School energy
Emean, Emax, Ecv
V
2Index of dispersion Evar/Emean V
2Dari penelitian-penelitian yang dilakukan terhadap kawanan ikan pelagis
seperti yang dilakukan oleh Gerlotto & Fr
ĕ
on (1988), Diner
et al
. (1989),
Georgakarakos & Paterakis (1993), Lu & Lee (1995) diketahui bahwa deskriptor
yang paling menentukan hasil dari proses identifikasi kawanan ikan dapat
(
Scomberomorus spp
), tongkol (
Euthynnus spp
), setuhuk (
Xiphias spp
), dan lemadang
(
Coryphaena spp
); sedangkan ikan pelagis kecil ukuran ikan dewasanya berkisar
antara 5-50cm. Ikan pelagis kecil dikelompokkan kedalam 16 kelompok yang
populasinya didominasi oleh 6 kelompok besar yaitu: ikan layang (
Decapterus spp
),
kembung (
Rastreligger
), teri (
Stolephorus spp
), Lemuru bali (
Sardinella Lemuru
),
dan jenis-jenis selar (
Selaroides spp, Alepes spp,
dan
Atale spp
). Dilihat dari
kemampuannya beruaya, ikan pelagis digolongkan sebagai ikan yang mempunyai
kemampuan untuk beruaya secara bebas dalam bentuk kumpulan. Fr
ĕ
on & Misund
(1999) mengemukakan bahwa ikan pelagis melakukkan ruaya antara lain untuk
mencari makanan, memijah, menghindari pemangsa, dan menemukan pasangan untuk
melakukan reproduksi. Dalam melakukan ruayanya ikan pelagis membentuk
kumpulan teratur dengan pola-pola tertentu yang disebut kawanan ikan (
fish
schooling
) atau kumpulan acak yang tidak membentuk pola-pola tertentu yang
disebut gerombolan ikan (
fish shoaling
).
2.2.1 Kawanan dan gerombolan ikan pelagis
Kawanan ikan dan gerombolan ikan adalah dua istilah yang digunakan untuk
menggambarkan kumpulan ikan yang sedang beruaya bersama. Organisasi kumpulan
ikan yang beruaya yang membentuk kawanan atau gerombolan ikan, dapat dijelaskan
berdasarkan ukuran kawanan, densitas, serta posisi dan lokasi ikan di dalam kolom
air (Bahri & Fr
ĕ
on, 2000). Beberapa definisi tentang istilah kawanan dan gerombolan
ikan dapat dilihat berikut ini:
(2) Breder & Halpern (1946) yang diacu Fr
ĕ
on & Misund (1999), kawanan ikan
adalah kumpulan ikan yang berenang dengan arah tertentu, pada ruang
tertentu, dan berenang dengan kecepatan yang sama.
(3) Radakov (1973), kawanan ikan adalah kumpulan ikan yang berenang
bersama-sama.
(4) Pitcher & Parish (1982), kawanan ikan adalah kumpulan ikan yang berenang
terpolarisasi dan tersinkronisasi.
(5) Fr
ĕ
on & Misund (1999), gerombolan ikan adalah kumpulan ikan yang
tersosialisasi yang tidak dipengaruhi oleh pola sinkronisasi dan polarisasi
sedangkan kawanan ikan adalah kumpulan ikan dimana setiap individu dalam
kumpulan itu berinteraksi secara sosial dengan melakukan sinkronisasi dan
polarisasi dalam berenang dengan arah tertentu dengan jarak terdekat antara
individu (
nearest neighbour distance
) yang tertentu. Dalam kawanan
umumnya terdapat spesies ikan mayoritas sedangkan hal sebaliknya sangat
jarang terlihat pada gerombolan ikan.
(6) He (1989), kawanan ikan adalah bagian dari gerombolan ikan.
Dari definisi diatas disimpulkan bahwa kawanan ikan (
fish school
) adalah
kumpulan ikan yang beruaya yang membentuk pola-pola tertentu dan terorganisir
dengan baik berdasarkan kecepatan, dan jarak antar individu dalam kumpulan
tersebut, sedangkan gerombolan ikan adalah kumpulan ikan yang karena
kebutuhannya melakukan sosialisasi antar individu tetapi tidak terorganisir
sebagaimana layaknya sebuah kawanan ikan. Dalam kawanan umumnya terdapat
spesies ikan mayoritas sedangkan hal sebaliknya tidak terlihat pada gerombolan ikan.
Dalam disertasi ini, kumpulan ikan yang akan diteliti adalah kumpulan lemuru
(
sardinella lemuru
). Nugroho & Sadatomo (komunikasi pribadi, Juli 2005),
mengemukakan bahwa kumpulan lemuru cenderung memiliki karakteristik kawanan
ikan, lebih lanjut Wudianto (2001) & Fauziyah (2005) mengemukakan bahwa
Lemuru Bali beruaya dengan membentuk kawanan ikan. Karena itu dalam disertasi
ini istilah yang akan digunakan selanjutnya adalah istilah kawanan ikan yang
Gambar 10
Sardinella lemuru
Bleeker, 1853 (DKP).
Sebagaimana dijelaskan sebelumnya, aplikasi JST untuk identifikasi kawanan
ikan pelagis dilakukan berdasarkan nilai deskriptor akustik. Nilai deskriptor diambil
dari citra akustik kawanan ikan target karenanya, karakteristik kawanan ikan target
menjadi perlu diperhatikan. Beberapa sifat kawanan ikan yang teramati oleh peneliti
sebelumnya antara lain;
(1) Dilihat dari bentuk kawanannya, 70% kawanan ikan pelagis berbentuk oval,
bulat, dan persegi, kawanan ikan pada lapisan dasar dan permukaan umumnya
berbentuk pipih sedangkan pada kolom air berbentuk bulat dan oval (Misund,
1993).
(2) Dilihat dari kecepatan renangnya, semakin besar kawanan ikan semakin
lambat pergerakannya (Hara,1987), tetapi menurut Misund (1993) hal tersebut
tidak berlaku untuk kawanan ikan
capelin
yang bergerak semakin cepat ketika
kawanannya semakin besar.
(3) Dilihat dari sebarannya, ikan pelagis bergerak dekat permukaan pada malam
hari dan ke perairan agak dalam pada siang hari (Laevastu & Hayes, 1982).
Sebagian ikan pelagis bergerak ke pantai pada malam hari dan ke tengah laut
pada siang hari (Fr
ĕ
on
et al
., 1993).
Jack Mackarel
banyak dijumpai dekat
permukaan pada musim dingin dan di tengah kolom air pada musim panas
(Williams & Pullen, 1993).
(4) Dilihat dari densitasnya, semakin besar volume kawanan ikan maka semakin
vertikal thermoklin. Jika thermoklin semakin dekat permukaan maka kawanan
ikan pelagis semakin tipis dan semakin tebal jika thermoklin bergerak kearah
lapisan dasar (Inakage & Hirano, 1983).
(5) Diperairan Laut Jawa dan Selat Makassar, secara vertikal kawanan ikan di
Laut Jawa berbeda berdasarkan musim (Nugroho
et al
., 1997), tetapi tidak
terdapat perbedaan nyata tentang penyebaran densitas ikan pelagis di perairan
Selat Makassar antara siang dan malam hari (Pasaribu
et al
., 1997).
Selanjutnya He (1989) mengemukakan bahwa kawanan ikan pelagis dapat
dibedakan berdasarkan struktur (
structure
), ukuran (
size
), dan bentuk (
shape
) atau
pola dari kawanan ikan.
2.2.2 Struktur kawanan ikan pelagis
Struktur kawanan ikan dapat dilihat dari pola kawanan (
pattern
) yang
memperlihatkan posisi individu ikan relatif terhadap individu lain yang ada
disekitarnya. Pola yang umum terlihat pada sebuah kawanan ikan adalah pola
berbentuk berlian. Struktur pola pergerakan berbentuk berlian ditentukan oleh jarak
terdekat antara individu yang berdampingan (
nearest neighbouring distance, NND
).
Pengaturan jarak terdekat antar individu ikan dilakukan untuk mengurangi tekanan air
yang diterima ikan ketika sedang beruaya (Freon & Misund,1999). Lebih lanjut He
(1989) mengemukakan bahwa semakin panjang ukuran ikan maka semakin besar
jarak terdekatnya tetapi semakin cepat ikan beruaya maka semakin kecil jarak
terdekat antara individu. Posisi ikan dalam kawanannya diilustrasikan dengan
NND: nearest neighbouring distance
Gambar 11 Bentuk berlian dalam kawanan ikan (He, 1989).
Besarnya variasi jarak terdekat antar individu bergantung pada spesies ikan,
sudut arah pergerakan kawanan (
heading
) yang dipengaruhi oleh arah arus, dan
ukuran ikan dalam kawanan (
size
). Kalaupun terdapat variasi jarak terdekat antara
individu akibat variasi ukuran panjang ikan, variasi tersebut tidak akan lebih dari 30%
(He, 1989).
2.2.3 Ukuran kawanan ikan pelagis
Ukuran kawanan ikan adalah luasnya ruang yang ditempati oleh kawanan
ikan. Ukuran kawanan ikan bervariasi dan dipengaruhi oleh spesies ikan, ukuran ikan,
waktu harian (siang atau malam hari), musim, dan tahapan fisiologis perkembangan
ikan (Freon & Misund, 1999). Spesies ikan pelagis besar umumnya menunjukkan
kawanan ikan yang lebih besar tetapi dengan densitas yang lebih kecil dibanding
spesies ikan pelagis yang lebih kecil (He, 1989).
Pada malam hari umumnya kawanan ikan terpecah menjadi
kawanan-kawanan yang mengelompok pada kawanan-kawanan yang lebih kecil yang berpencar pada
Pada musim gugur (
fall
) dan musim dingin (
winter
) kawanan
anchovy
membentuk kawanan ikan yang lebih kecil dibandingkan dengan kawanan ikan
anchovy pada musim semi (
spring
) dan musim panas (
summer
) (Fr
ĕ
on & Misund,
1999). Pada musim gugur dan musim dingin
anchov
y utara dapat membentuk
kawanan ikan dengan ukuran 25-35 m pada arah horisontal dan 12-40 m pada arah
vertikal sedangkan ukuran kawanan
hering
saat makan lebih kecil dibandingkan
dengan saat memijah tetapi, ukuran kawanan ikan
hering
dan
capelin
yang terbesar
dapat ditemukan pada saat ikan tersebut memijah (He, 1989).
2.2.4 Bentuk kawanan ikan pelagis
Bentuk kawanan ikan bervariasi. Jika dilihat dari atas maka rataan
perbandingan antara panjang, lebar, dan kedalaman kawanan ikan adalah sebesar 3: 2:
1 (He, 1989). Variasi bentuk kawanan ikan ini bergantung pada aktivitas kawanan
tersebut saat terdeteksi. Bentuk kawanan ikan yang sedang menghadapi pemangsanya
berbeda dengan bentuk kawanan ikan yang sedang makan.
Kawanan ikan yang sedang menghadapi pemangsanya umumnya membelah
menjadi bagian yang kecil atau berubah bentuk menjadi bentuk bola yang berputar
dengan tujuan untuk membingungkan pemangsanya. Pecahan-pecahan kecil dari
ikan-ikan tersebut akan membentuk kawanan seperti semula jika ancaman dari
pemangsa telah dapat dihindari (Fr
ĕ
on & Misund, 1999).
Kawanan ikan yang sedang beruaya cepat memiliki ukuran panjang kawanan
yang lebih besar dibandingkan dengan lebarnya (He, 1989). Gambar 12 dan Gambar
13 menggambarkan beberapa ilustrasi tentang bentuk dan pola kawanan ikan di
(2) Tipe 2,
Fish in school
menggambarkan citra akustik sebaran beberapa kawanan
ikan yang terstruktur yang terdapat pada kolom air.
(3) Tipe 3,
Fish in aggregations
menggambarkan sejumlah besar gema dari
ikan-ikan tunggal yang menggerombol yang menyebar secara acak pada kolom air,
tanpa adanya struktur yang jelas.
(4) Tipe 4 dan 5,
Fish in a pelagic & demersal layers
menggambarkan citra akustik
dari kawanan besar ikan pelagis (a) dan ikan demersal (b) yang terdapat di kolom
dan dekat dasar perairan.
Dalam disertasi ini deskriptor akustik kawanan ikan pelagis dengan tipe 2, 4 dan 5 yang
akan diukur sebagai data penelitian. Hal ini didasarkan pada studi literatur yang
dilakukan sebelumnya dimana hampir semua kawanan ikan pelagis ekonomis beruaya
Secara garis besar metode penelitian dalam disertasi ini berkaitan dengan permasalahan identifikasi kawanan ikan secara hidroakustik yang berkaitan dengan pengukuran dan pemrosesan data hidroakustik, ekstraksi deskriptor hidroakustik, dan identifikasi kawanan ikan berdasarkan deskriptor hidroakustik.
Pengukuran data hidroakustik sebagian besar dilakukan secara vertikal dan dilakukan dengan alat scientific echosounder. Data hasil pengukuran selanjutnya diproses dengan cara tertentu dan ditampilkan dalam bentuk citra akustik dua-dimensi (2-D). Walaupun digambarkan secara 2-D, informasi yang terdapat pada sebuah data citra akustik bersifat tiga-dimensi (3-D). Karena itu, dari citra akustik yang dihasilkan dapat diperoleh informasi tentang bentuk dan posisi kawanan ikan dalam kolom air serta intensitas hamburan balik dari kawanan tersebut.
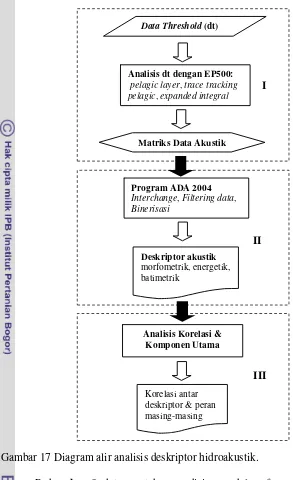
Metode identifikasi yang digunakan hingga saat ini tidak dapat secara langsung bekerja pada citra akustik maka identifikasi tidak dilakukan secara langsung pada citra tersebut tetapi pada deskriptor hidroakustik yang terkandung dalam data citra akustik. Karena itu, ekstraksi deskriptor akustik yang terdapat pada sebuah data hidroakustik merupakan permasalahan tersendiri dalam disertasi ini. Saat ini telah tersedia banyak program ekstraksi yang dapat digunakan untuk keperluan itu tetapi dalam disertasi ini digunakan Program ADA-2004.
Gambar 14 Diagram alir metode penelitian.
15 Desk. teridentifikasi
8 Desk. utama
METODE STATISTIK
JSTPB1
JSTPB2
8 Desk. utama
JSTPB3
Validasi Silang
Identifikasi JSTPB3 Identifikasi
JSTPB2
Validasi Silang
SELESAI Identifikasi
STATISTIK
Rancangan awal JSTPB Citra akustik
Ikan Uji
Citra Akustik Ikan Target
Matriks Data Akustik
Hitungan Deskriptor
Identifikasi JSTPB1 17 Desk
Sebagaimana dijelaskan sebelumnya, dalam disertasi ini, identifikasi spesies kawanan lemuru dilakukan dengan Metode Statistik dan Metode JST. Hasil dari kedua metode ini selanjutnya dibandingkan untuk melihat apakah terdapat perbedaan nyata antara hasil keduanya. Dalam melakukan identifikasi, kedua metode ini pada dasarnya melakukan hal yang sama yaitu melihat kesamaan antara varibel deskriptor dari ikan target dengan variabel-variabel deskriptor dari ikan uji.
Gambar 14 menunjukkan seluruh proses yang akan dilakukan dalam mengolah data akustik baik data akustik kawanan ikan target (data akustik dari kawanan ikan yang sudah diidentifikasi dan klasifikasi), maupun data akustik kawanan ikan uji (data akustik dari kawanan ikan yang akan di identifikasi dan klasifikasi). Dengan demikian data kawanan lemuru akan terdiri dari dua kelompok data yaitu kelompok data kawanan ikan target dan kelompok data kawanan ikan uji.
3.1 Data Akustik
Data akustik yang dimaksudkan dalam penelitian ini adalah data threshold dari kawanan lemuru (Sardinella lemuru) yang diperoleh dari hasil survei akustik yang telah dilakukan sebelumnya.
Data akustik lemuru diperoleh dari hasil survei akustik yang dilakukan oleh Departemen Kelautan dan Perikanan (DKP) dan Badan Pengkajian dan Penerapan Teknologi (BPPT) yang dilakukan di Selat Bali pada bulan September 1998 (musim peralihan II, September-November), bulan Mei 1999 (musim peralihan I, Maret-Mei), dan bulan Agustus 2000 (musim timur, Juni-Agustus) dengan menggunakan Kapal Riset Baruna Jaya IV. Pengukuran data akustik dilakukan dengan SIMRAD Scientific Echosounder EK-500 tipe bim terbagi (split
beam) dengan tipe transduser ES120-7F dengan frekwensi 120kHz, dan
maksimum daya pancar 1500watt. Transduser dipasang secara tetap (hull
Gambar 15 Lintasan survei kapal Baruna Jaya IV di Selat Bali tahun 1998, 1999, 2000.
3.1.1 Pemrosesan data akustik
Pemrosesan data akustik dilakukan terhadap data ikan target dan data ikan
uji. Pemrosesan data lemuru dilakukan dengan program SIMRAD Echo
Processing 500 (EP-500) versi 5. dengan menggunakan fasilitas analyze pelagic layer, analyze trace tracking, dan analyze expended integral dengan Time Varied Gain (TVG) 40log(r). Dari pemrosesan ini didapatkan citra akustik dan Matriks Data Akustik (MDA) dari kawanan ikan target dan ikan uji yang akan diidentifikasi. Secara garis besar citra akustik dan MDA didapatkan dengan cara sebagai berikut:
(1) Menghapuskan jejak-gema (echo-trace) dari konsentrasi biomassa bukan target dengan menetapkan ambangbatas (threshold) Scattering Volume (SV) dan Target Strength (TS) dari spesies kawanan ikan target.
(2) Mengelompokkan pixel dari kawanan ikan target, untuk hitungan nilai deskriptor.
Pada tahapan ini dihasilkan matriks data akustik yang berisi nilai SV, TS dan informasi tambahan lainnya seperti posisi vertikal dan horisontal kawanan ikan. Hasil dari tahapan ini selanjutnya digunakan sebagai data masukan dalam menghitung nilai-nilai deskriptor. Sebelum citra akustik kawanan ikan diproses lebih lanjut maka terlebih dahulu dilakukan seleksi morfometrik, batimetrik, dan energetik terhadap citra tersebut. Hal ini dilakukan selain untuk mengurangi kemungkinan tercampurnya data kawanan ikan yang diinginkan dengan data kawanan ikan lainnya juga untuk memudahkan dalam proses pengelompokan nantinya. Kriteria morfometrik, batimetrik, dan energetik yang digunakan adalah sebagai berikut:
(1) Kriteria Morfometrik; ukuran minimal panjang dan tinggi kawanan ikan masing-masing 5m dan 6m, sedangkan ukuran maksimalnya tidak dibatasi. Kriteria ini diambil berdasarkan hasil penelitian Simmonds et al. (1996); Coetzee (2000); Bahrie & Freon (2000) terhadap kawanan ikan mackarel, sardine, anchovy, dan herring.
(2) Kriteria Batimetrik; posisi vertikal kawanan ikan dibatasi antara selang kedalaman 10-