PERANCANGAN ROBOT PEMADAM API MENGGUNAKAN CMU CAM3 BERBASIS MIKROKONTROLER ATMEL 89S51.
Teks penuh
Gambar


Dokumen terkait
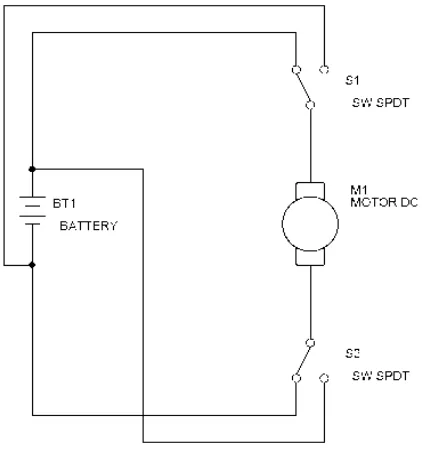
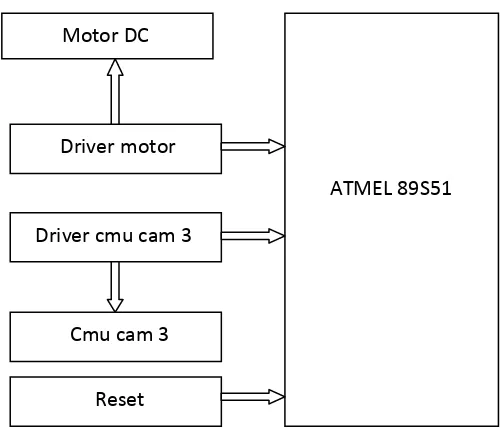
Kontrol utama robot penghindar halangan adalah mikrokontroler yang berfungsi mengatur kinerja dari sensor ultrasonik dan motor DC, pada saat catu daya robot dihidupkan
Untuk menggerakan motor DC dapat menggunakan relay yang dirangkaikan dengan komponen lain sehingga dapat di pulse melalui minimum system
Dalam Tugas Akhir telah direalisasikan lengan robot dengan lima derajat kebebasan yang menggunakan motor DC dan motor servo sebagai penggeraknya.. Mikrokontroler ATMEGA16 digunakan
Setelah tangga tegak apabila phototransistor mendeteksi adanya api maka driver LM324N akan memberi masukan 0 pada portA.1 mikrokontroler dan mikrokontroler melalui
Bahasa C yang digunakan untuk operasional Mikrokontroler ATmega8535 pada sistem gerak robot yang memanfaatkan Motor Weeper sebagai pemadam... api, dan program CodeVision AVR
Kontrol utama robot penghindar halangan adalah mikrokontroler yang berfungsi mengatur kinerja dari sensor ultrasonik dan motor DC, pada saat catu daya robot dihidupkan
Robot ini difungsikan dengan menggunakan berbagai input dan output berupa sensor dan motor yang di fungsikan dengan menggunakan IC Mikrokontroler Atmega 8535L, semua sensor
Salah satu jenis robot yang populer adalah robot line follower pemadam api, yakni sebuah robot dimana robot dapat menjelajahi jalur dan memadamkan api lilin, robot
