ISSN 0853 - 0823
PENGUKURAN KONSTANTA PEGAS SECARA SEDERHANA BERBASIS
KOMPUTER
Ign Edi Santosa
Jurusan Fisika, Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta Paingan, Maguwohardjo, Depok, Sleman
INTISARI
Telah dilakukan pengembangan perangkat pengukuran konstanta pegas dengan bantuan komputer. Untuk mendeteksi simpangan pegas setiap saat digunakan satu perangkat alat yang meliputi magnet, kumparan dan interface pengumpul data Vernier LabPro. Dari osilasi harmonis yang teramati dapat diperoleh frekuensi osilasinya dan selanjutnya dapat ditentukan nilai konstanta pegas yang digunakan
Keywords: pegas, osilasi harmonis, frekuensi osilasi
I. PENDAHULUAN
Pengukuran konstanta pegas merupakan salah satu mata praktikum Fisika Dasar (Armitage, 1982; Edmonds, 1993). Pada praktikum tersebut sebuah benda digantungkan pada pegas. Selanjutnya sistem massa pegas tersebut digetarkan. Pada umumnya pengukuran frekuensi osilasi dilakukan dengan mengukur periodanya menggunakan sebuah stopwatch. Pengukuran semacam ini hanya dapat memberikan nilai akhirnya saja yaitu nilai perioda, sedangkan gejala osilasi harmonis yang menjadi dasar pengukuran justru tidak tertampilkan. Praktikan hanya dapat melihat gejala naik turunnya benda tanpa melihat langsung tampilan fungsi sinusoidalnya.
Untuk memperlihatkan gejala osilasi tersebut telah digunakan motion detector berbasis komputer
(Presto and Holody,2003). Selain itu juga telah dikenal penggunaan detektor gaya berbasis komputer untuk mengamati osilasinya (NN, 2006). Dengan menggunakan detektor berbasis komputer semacam itu, posisi setiap saat dari benda yang digantungkan langsung dapat ditampilkan di monitor. Dari data tersebut akan diperoleh nilai frekuensi osilasinya dan akhirnya nilai konstanta pegas yang digunakan.
Salah satu kendala dari penggunaan detektor tersebut adalah ketersediaan detektornya seperti
motion detector dan detektor gaya . Harga detektor tersebut relatif mahal. Selain itu detektor tersebut
harus kompatibel dengan software yang tersedia. Untuk dapat mengatasi kendala tersebut pada penelitian ini telah dilakukan modifikasi perangkat pengukuran konstata pegas. Sebagai ganti detektor yang telah tersedia di pasaran digunakan satu kumparan dan satu buah magnet. Pendeteksian frekuensi osilasi dilakukan melalui pengukuran frekuensi tegangan bolak-balik hasil induksi.
II. METODE PENELITIAN
Susunan peralatan yang digunakan dalam eksperimen ini ditunjukkan pada Gambar 1. Sebuah beban (2), piringan (3) dan magnet batang (4) digantungkan pada ujung pegas (1). Sebuah kumparan (5) diletakkan di bawah magnet tersebut. Ketika berosilasi magnet akan turun naik dengan frekuensi yang sama dengan frekuensi osilasi sistem tersebut. Kumparan yang berada di bawah sistem pegas dan magnet, akan menangkap medan magnet yang berubah terhadap waktu. Tegangan induksi yang muncul di kumparan diukur dengan probe tegangan yang merupakan bagian dari satu set interface pengumpul data Vernier LabPro (6). Selanjutnya tegangan tersebut akan diolah dengan PC (9) dan ditampilkan dalam monitor (10). Untuk mengecek gejala osilasi, secara simultan, posisi benda setiap saat diamati dengan menggunakan motion detector (7). Gelombang ultra sonic dari motion detector akan
dipantulkan oleh piringan pemantul (3) kembali ke motion detector. Selain itu juga dilakukan
pengamatan kuat medan magnet dengan sensor (8). Keluaran motion detector dan sensor tersebut akan
diolah oleh PC melalui pengumpul data Vernier LabPro (6). Pengolahan data dilakukan dengan menggunakan program LoggerPro.
ISSN 0853 - 0823
Gambar 1. Susunan peralatan yang digunakan dalam eksperimen.
1. pegas; 2. beban; 3. piringan; 4. magnet batang; 5. kumparan; 6. interface Vernier LabPro; 7.
motion detector; 8. sensor medan magnet 9. CPU; 10. monitor
Posisi (y) magnet batang yang berada di ujung pegas, setiap saat t mengikuti persamaan
)
sin(
ϖ
+
φ
=
A
t
y
(1) dengan A: amplitudo ω: frekuensi sudut φ: faseNilai frekuensi sudut tergantung pada kontanta pegas k dan massa benda m yang digantungkan
(Armitage, 1982; Edmonds, 1993) menurut persamaan
m
k
=
ϖ
(2)Karena sistem massa pegas beserta magnetnya berosilasi, fluks medan magnet yang ditangkap kumparan akan berubah-ubah terhadap waktu, sehingga akan dihasilkan tegangan induksi V mengikuti
dt
d
N
V
=
−
ϕ
(3)dengan
N: jumlah lilitan dari kumparan
ϕ : fluks medan magnet yang ditangkap oleh kumparan
Fluks medan magnet yang ditangkap akan tergantung dari posisi magnet terhadap kumparan yang mengikuti persamaan (1). Karena itu dari persamaan (3) dapat dihasilkan persamaan
)
(
cos
ϖ
+
φ
−
=
V
t
V
m (4)1
2
3
4
5
6
7
8
9 10
ISSN: 0853 - 0823
dengan
Vm: tegangan maksimal yang nilainya tergantung pada parameter kumparan dan
magnet batang yang digunakan
Sesuai dengan persamaan (4) frekuensi tegangan yang teramati akan sama dengan frekuensi osilasi sistem massa pegas.
Dalam praktek sistem tersebut meliputi pegas, magnet dan piringan dengan massa total M, dan beban tambahan bermassa mb. Sehingga menurut Edwards dan Hultsch (1972) persamaan (2) akan
menjadi b
m
M
k
+
=
ϖ
(5) atau)
(
1
1
2M
m
bk
+
=
ω
(6)Massa total M bernilai konstan, sedangkan nilai massa beban mb dapat divariasi dengan memberikan
beban tambahan yang berbeda-beda. Dengan mengukur nilai frekuensi osilasi ω untuk berbagai nilai massa beban tambahan mb, dapat ditentukan nilai konstanta pegas dengan menggunakan persamaan (6). III. HASIL DAN PEMBAHASAN
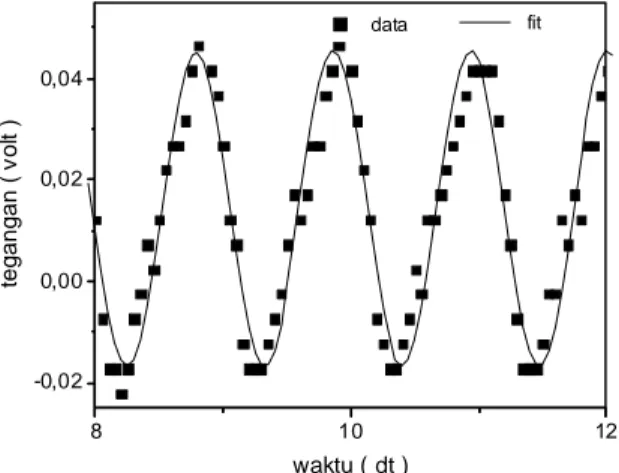
Pengamatan dilakukan dengan menggunakan perangkat interface Vernier LabPro yang dilengkapi dengan program LoggerPro. Hasil pengamatan tegangan induksi untuk beban bermassa 100 g ditunjukkan pada Gambar 2. Data pengukuran ditampilkan dengan ttitk data ( ■ ). Dengan menggunakan fasilitas fiting data yang tersedia di program LoggerPro dapat ditunjukkan garis hasil fittingnya dengan persamaan
V = 0,03106 x sin( 5,841 t + 0,5305) + 0,01427
Gambar 2. Grafik hubungan tegangan induksi terhadap waktu yang teramati ketika sistem massa pegas bermagnit digetarkan. Beban tambahan yang digunakan bermassa 100 g. Data pengukuran ditampilkan
dengan titik ( ■ ), sedangkan garis yang terlihat merupakan hasil fittingnya
Tegangan induksi ini muncul karena fluks medan medan magnet yang ditangkap oleh kumparan berubah setiap waktu secara sinusoidal seperti yang teramati dengan sensor kuat medan magnet (data tidak disajikan).
Pada saat pengukuran tegangan induksi tersebut, juga diukur posisi beban setiap saat menggunakan motion detector. Hasil pengamatannya ditunjukkan pada Gambar 3. Dari titik-titik data
dapat diperoleh garis fiting untuk posisi piringan mengikuti persamaan y = 0,02015 x sin ( 5,843 t + 5,228) + 0,360 8 10 12 -0,02 0,00 0,02 0,04 te gan ga n ( v o lt ) waktu ( dt ) data fit
ISSN 0853 - 0823
Hasil fitting data tegangan induksi dan posisi benda memberikan nilai frekuensi osilasi yang sama.
Hal ini menunjukkan bahwa pengukuran frekuensi osilasi dapat dilakukan melalui pengukuran tegangan induksi. Penggunaan perangkat yang sederhana yaitu magnet dan kumparan dapat dijadikan pengganti motion detector yang relatif mahal untuk mengukur frekuensi osilasi.
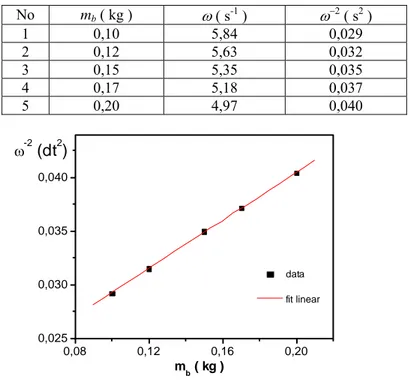
Melalui pengukuran tegangan induksi telah diperoleh nilai frekuensi osilasi untuk berbagai nilai massa beban seperti disajikan dalam Tabel 1. Pada tabel tersebut juga disajikan hasil perhitungan nilai dari ω−2. Dari tabel tersebut dapat dibuat grafik hubungan ω−2 terhadap m
b mengikuti persamaan (6)
seperti yang ditampilkan pada Gambar 4.
Gambar 3. Grafik hubungan posisi beban terhadap waktu yang teramati ketika sistem massa pegas bermagnit digetarkan. Beban tambahan yang digunakan bermassa 100 g. Data pengukuran ditampilkan
dengan titik ( ■ ), sedangkan garis yang terlihat merupakan hasil fittingnya Tabel 1. nilai frekuensi osilasi ω untuk berbagai nilai massa beban mb
No mb ( kg ) ω ( s-1 ) ω−2( s2 ) 1 0,10 5,84 0,029 2 0,12 5,63 0,032 3 0,15 5,35 0,035 4 0,17 5,18 0,037 5 0,20 4,97 0,040
Gambar 4. Grafik hubungan ω-2 terhadap massa beban. Data pengukuran ditampilkan dengan titik( ■ ),
sedangkan garis yang terlihat merupakan hasil fittingnya Dari Gambar 4 dapat diperoleh hasil fitting data mengikuti persamaan
ω-2 = A + B mb dengan: A = ( 0,0179 ± 0,0002) s2 0,08 0,12 0,16 0,20 0,025 0,030 0,035 0,040 ω-2 (dt2) data fit linear mb ( kg ) 8 10 12 0,34 0,36 0,38 pos is i ( m ) waktu ( dt ) d ata fit
ISSN: 0853 - 0823
B = ( 0,113 ± 0,001 ) s2 kg-1
Berdasarkan persamaan (6) dan nilai hasil fitting di atas dapat diperoleh nilai konstanta pegas dari
pegas yang dipakai adalah
k = ( 8,84 ± 0,09 ) kg s-2
Berbeda dengan cara yang konvensional pada percobaan pengukuran konstanta pegas berbasis komputer ini, juga ditampilkan secara langsung gejala osilasinya. Pengumpulan data yang dilakukan secara online seperti ini akan mempermudah pemahaman. Selain itu penghitungan menjadi relatif mudah karena tersedianya fasilitas fiting data pada program LoggerPro.
Kegiatan eksperimen berbasis komputer memerlukan satu perangkat pengumpul data dan program pendukungnya serta sensor yang sesuai dengan besaran yang akan diukur. Mengingat harga sensor yang relatif mahal, pada pengukuran konstanta pegas ini telah digunakan perangkat sederhana yaitu magnit dan kumparan yang sudah banyak tersedia di lab-lab Fisika. Penggunaan perangkat sederhana ini menghasilkan data frekuensi osilasi yang sama dengan hasil yang menggunakan sensor yang lebih canggih yaitu moton detector.
Pengukuran yang telah dilakukan berdasar pada hukum Faraday. Karena itu selain untuk pengukuran konstanta pegas, pengukuran ini juga dapat digunakan untuk menunjukkan hubungan-hubungan yang ada dalam hukum Faraday [Gluck, 2009]. Ketergantungan tegangan induksi pada parameter yang ada, dapat ditunjukkan dengan menggunakan berbagai magnet maupun kumparan yang berbeda luas penampangnya maupun jumlah lilitannya.
IV. KESIMPULAN DAN SARAN
Secara sederhana telah dilakukan pengukuran frekuensi osilasi sistim massa pegas melaui pengukuran frekuensi tegangan induksi dengan bantuan komputer. Dari nilai frekuensi ini selanjutnya dapat ditentukan nilai konstanta pegas dari pegas yang digunakan.
V. UCAPAN TERIMA KASIH
Penulis mengucapkan terimakasih kepada P. Ngadiono dan P Sugito yang telah membantu mempersiapkan perlengkapan eksperimen.
VI. DAFTAR PUSTAKA
Armitge, E. 1982. Practical Physics in SI. John Murray. New York
Edmonds, O.S. 1993. Cioffari’s Experiments in College Physics. DC Heath and Company. Toronto.
Edwards, T.W. and Hultsch, R.A. 1972. Mass Distribution and Frequencies of a Vertical Spring. Am. J. Phys. 40: 445-449
Gluck, P. 2009. Set-up clarifies induced emf. Physics Education. 16
N.N. 2006. Physics with the Xplorer GLX. PASCO: 81-86.
Presto, M.C., Holody, P.R. 2003. Measuring the Damping Constant for Underdamped Harmonic Motion. The Physics Teacher. 41: 22-24.