Perancangan Dan Implementasi Alat Ukur Kaki Dan Penentu Ukuran Sepatu Secara
Digital Berbasis Mikrokontroler”
.
Muliono1, Iwan Fitrianto Rahmad2, Edy Victor Haryanto3
Universitas Potensi Utama
Universitas Potensi Utama, Jl. K.L Yos Sudarso Km.6.5 No 3A Tanjung Mulia Medan [email protected]
Abstrak - Perkembangan teknologi pada zaman
sekarang sudah berkembang sangat maju dan sangat pesat apalagi perkembangan dalam bidang teknologi komputer digital dan perangkat– perangkat lainnya yang serba digital.
Karena kemajuan teknologi sangat membantu dalam setiap pekerjaan manusia seperti di pabrik industri yang sudah banyak menggunakan kerja mesin untuk melakukan produksi perakitan, pengepakan barang dan pengemasan.
Seperti pada industri pembuatan sepatu yang sekarang sudah banyak menggunakan kemajuan teknologi dalam memproduksi sepatu untuk skala yang sangat besar.
Mikrokontroller adalah sebuah sistem mikroprosesor dimana didalamnya sudah terdapat CPU, Read Only Memory (ROM), Random Accsess Memory (RAM), Input-Output, timer, interrupt, Clock dan peralatan internal lainnya yang sudah saling terhubung dan terorganisasi dengan baik dalam satu chip yang siap dipakai
Arduino merupakan platform open source baik secara hardware dan software. Arduino terdiri dari mikrokontroler mega AVR seperti ATmega8, ATmega168, ATmega328, ATmega1280, dan ATmega2560 dengan menggunakan kristal osilator 16 MHz, namun ada beberapa tipe arduino yang menggunakan kristal osilator 8 MHz. Catu daya yang dibutuhkan untuk mensupply minimum system arduino cukup dengan tegangan 5 VDC. Port arduino Atmega series terdiri dari 20 pin yang meliputi 14 pin I/O digital dengan 6 pin dapat berfungsi sebagai output PWM (Pulse Width Modulation) dan 6 pin I/O analog.
Arduino Uno R3 adalah board sistem minimum berbasis mikrokontrolern ATmega328P jenis AVR. Arduino Uno R3 memiliki 14 digital input /output ( 6 diantaranya dapat digunakan untuk PWM output), 6 analog input, 16 MHz osilator kristal, USB connection, power jack, ICSP header dan tombol reset.
Kata Kunci :kaki,sepatu,ATMega328,Arduino Uno,Sensor
Abstract - Technological developments in contemporary times has been developing very advanced and very rapid development especially in the field of digital computer technology and devices - other devices that are all-digital. Due to advances in technology have helped in every man's work like in the industrial plant has
many uses working machines for production assembly, packing and packaging. As in the footwear industry which now has many uses technological advances in producing shoes for
a very large scale.
Microcontroller is a microprocessor system in which there already exist CPU, Read Only Memory (ROM), Random Access Memory (RAM), Input-Output, timer, interrupt, Clock and internal equipment others already interconnected and well organized in a single chip ready to wear Arduino is an open source platform, both in hardware and software. Arduino is composed of mega AVR microcontroller such as the ATmega8, ATmega168, ATmega328, ATmega1280, and ATmega2560 using a 16 MHz crystal oscillator, but there are several types of arduino that uses 8 MHz crystal oscillator. The power supply needed to supply sufficient minimum arduino system with voltage of 5 VDC. Port arduino Atmega series consists of 20 pins that include 14 pin I / O digital with 6 pin can function as PWM output (Pulse Width Modulation) and 6 pin I / O analog. Arduino Uno R3 are the minimum system board based mikrokontroller ATmega328P types of AVR. Arduino Uno R3 has 14 digital input / output (6 of which can be used for PWM outputs), 6 analog inputs, 16 MHz crystal oscillator, a USB connection, a power jack, ICSP header and a reset button.
Keywords: feet, shoes, ATmega328, Arduino Uno, Sensor
1. PENDAHULUAN
Perkembangan teknologi pada zaman sekarang sudah berkembang sangat maju dan sangat pesat apalagi perkembangan dalam bidang teknologi komputer digital dan perangkat – perangkat lainnya yang serba digital.
. Dan pada zaman sekarang ini menggunakan alas kaki adalah hal yang sangat penting selain untuk melindungi kaki dari panas dan kehujanan pada saat sedang melakukan aktifitas sehari-hari dan juga bisa untuk menunjang penampilan diri.
Selain itu tidak setiap orang memiliki bentuk kaki dan panjang alas kaki yang sama karena itulah orang sering sekali kesusahan untuk menentukan ukuran sepatu mereka sendiri. Terkadang ukuran sepatu yang kita anggap pas sering sekali tidak pas dan kadang tidak sesuai dengan ukuran sepatu yang sering kita pakai bisa saja kebesaran dan kekecilan.
. Bentuk sepatu juga sangat mempengaruhi dalam menentukan ukuran sepatu karena sepatu memiliki banyak bentuk agar bisa mendapatkan ukuran sepatu yang benar-benar akurat ukurannya dengan panjang alas kaki kita dan bisa nyaman untuk dipakai maka dibuat lah suatu alat yang dapat membantu dalam mengukur panjang alas kaki dan menentukan ukuran sepatu secara digital agar lebih mudah melihat hasil pengukuran alas
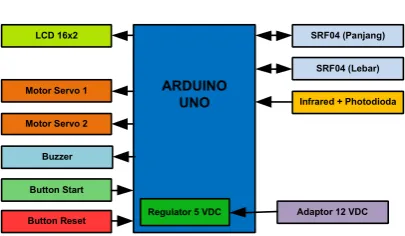
Gambar 1. Diagram Blok Rangkaian
1. Arduino sebagai pengendali perangkat, melakukan proses pengukuran berdasarkan data sensor dan memprosesnya menjadi ukuran sepatu.
2. LCD 16x2 untuk menampilkan data hasil pengukuran dan data ukuran sepatu.
3. Motor servo 1 sebagai penggerak mekanik untuk mengukur panjang kaki.
4. Motor servo 2 sebagai penggerak mekanik untuk mengukur lebar kaki.
8. Button Reset untuk menjalankan program dari awal kembali.
9. Buzzer sebagai indikator berupa suara. 10.Adaptor 12 VDC 1A sebagai sumber
tegangan.
11.Regulator tegangan 5VDC.
a. Perancangan
Perancangan pengukur kaki dan penentu ukuran sepatu ini terdiri dari 2 bagian bagian, yaitu perancangan secara elektronik dan perancangan secara mekanik.
b. Perangkat Elektronik
Perancangan pengukur kaki dan penentu ukuran sepatu menggunakan beberapa perangkat seperti sensor dan kontrol output. Perangkat elektronik yang digunakan sebagai berikut.
c. Ardunio
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Mikrokontroler itu sendiri adalah chip atau IC (integrated circuit) yang bisa diprogram menggunakan komputer. Tujuan menanamkan program pada mikrokontroler adalah agar rangkaian elektronik dapat membaca input, memproses input tersebut dan kemudian menghasilkan output sesuai yang diinginkan. Berikut adalah tabel penggunaan port input/output pada perancangan pengukur kaki dan penentu ukuran sepatu.
d. Perancangan Sensor Jarak SRF04
Gambar 2. Perancangan Rngkaian Sensor Jarak SRF04 Pada Arduino
(Ground) Arduino. Kaki data sensor jarak SRF04 menggunakan pin D8 untuk sensor jarak 1 dan pin D10 untuk sensor jarak 2 pada arduino sebagai data input dan pin D9 untuk sensor jarak 1 dan pin D11 untuk sensor jarak 2 pada arduino sebagai data ouput.
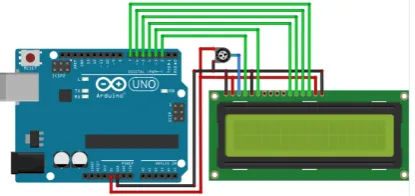
e. Perancangan LCD 16x2
Rangkaian LCD berfungsi untuk menampilkan data berupa hasil pengukuran panjang dan lebar kaki serta ukuran sepatu setelah dilakukan perhitungan berdasarkan hasil pengukuran tersebut. Rangkaian LCD dapat dilihat pada gambar 3. berikut:
Gambar 3. Perancangan Rangkaian LCD 16x2
Pada gambar 3. pin 1 dan pin 15 dihubungkan ke Vcc (5V), pin 2 dan 16 dihubungkan ke Gnd (Ground), pin 3 merupakan pengaturan tegangan Contrast dari LCD, pin 4 merupakan Register Select (RS), pin 5 merupakan R/W (Read/Write), pin 6 merupakan Enable, pin 11-14 merupakan data. Reset, Enable, R/W dan data dihubungkan ke arduino. Fungsi dari trimpot adalah untuk mengatur gelap/terangnya karakter yang ditampilkan pada LCD.
f. Perancangan Sensor Infrared + Photodioda LED infrared berfungsi sebagai pemancar. Berkas cahaya dari LED inframerah ini nantinya akan ditangkap oleh photodiode. Photodiode digunakan sebagai penangkap gelombang cahaya yang dipancarkan oleh inframerah. Besarnya tegangan atau arus listrik yang dihasilkan oleh photodiode tergantung besar kecilnya radiasi yang dipancarkan oleh inframerah. Rangkaian ini berfungsi sebagai sensor pendeteksi adanya kaki pada perangkat, sebagai pemicu perangkat untuk bekerja.
Rangkaian diletakkan pada bagian bawah atau tempat meletakan kaki yang diukur. Perancangan rangkaian sensor infrared dan photodioda ini dihubungkan pada pin A2 pada arduino. Data yang digunakan merupakan ada ADC (Analog Digital Converter) atau berupa angka nilai analog (tegangan). Perancangan rangkaian tersebut dapat dilihat pada gambar
di bawah ini.
Gambar 4. Perancangan Rangkaian Sensor Infrared + Photodioda
3. HASIL DAN UJI COBA
a. Tampilan Hasil
Dalam bab ini akan dijelaskan dan ditampilkan bagaimana hasil dari pengujian rancangan alat yang dibuat beserta
pembahasan tentang pergerakan, cara kerja pengukuran kaki dan perhitungan penentuan ukuran sepatu. Adapun hasil dari pengujian yang dilakukan adalah perangkat elektronik yang dibuat atau dirancang dan diprogram dengan menggunakan aplikasi Arduino IDE.
b. Pelaksanaan Pengujian Rangkaian tidak ada trouble pada saat pengujian. 2. Sebelum pengujian perangkat, hubungkan
power supply (adaptor) 12VDC 1A pada sumber listrik.
4. Hasil pengujian dipaparkan dalam bentuk tabel dan grafik, dianalisa dan dijelaskan secara terperinci.
5. Pengukuran kaki menggunakan beberapa sampel random dengan ukuran kaki 20 cm – 30 cm.
c. Tampilan Hasil Perangkat
Gambar 5. Tampak atas
Gambar 6. Tampak Depan
Gambar 7. Tampak Keseluruhan
d. Pelaksanaan Pengujian Rangkaian
Untuk mengetahui apakah rangkaian pada perangkat telah bekerja dengan baik, maka dilakukan pengujian dengan memberikan program perintah pada mikrokontroler dengan melakukan penginputan data dari komputer ke dalam mikrokontroler. Sebelum dilakukannya proses download program, hubungkan terlebih dahulu antara komputer melalui kabel USB dengan rangkaian mikrokontroler.
Dalam proses instalasi ini menggunakan aplikasi Arduino 1.6.9. Untuk melakukan instalasi ini dapat dilakukan dengan beberapa langkah antara lain :
1. Langkah pertama yang dilakukan adalah dengan mengklik icon . Setelah program melakukan load maka akan terlihat bentuk tampilan seperti gambar 8 di bawah ini.
Gambar 7. Tampilan Arduino 1.6.9
2. Selanjutnya yang dilakukan sebelum
menginstal program terhadap
seperti pada gambar IV.3. Pengaturan kedua adalah pemilihan port USB yang digunakan perangkat, seperti pada gambar 8. di bawah ini :
Gambar 8. Pengaturan dan Pemilihan Board
Arduino
Gambar 9. Pengaturan Port USB pada Software
Arduino 1.6.9
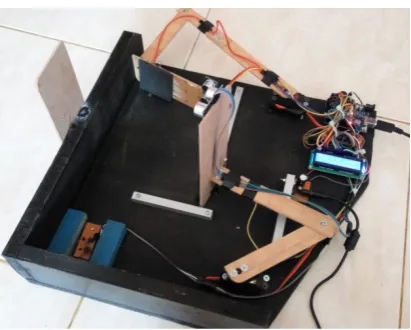
e. Pengujian Hardware
Setelah semua rangkaian yang telah selesai dirancang pada perancangan pengukur kaki dan penentu ukuran sepatu, kemudian dilakukan penyatuan semua rangkaian yang telah selesai dengan mekanik. Berikut adalah
gambar hasil dari perancangan mekanik dan eletronik ditunjukan oleh gambar 10 di bawah ini :
Gambar 10. Mekanik Pengukur Panjang Kaki
Gambar 11. Posisi Peletakan Sensor Infrared dan Photodioda
Gambar 12. Hardware Mekanik dan Elektronik
f. Uji Coba Perangkat
Setelah semua komponen terpasang dan program selesai disusun, maka langkah berikutnya adalah melakukan pengujian alat. Pengujian ini dilakukan secara bertahap dari rangkaian ke rangkaian berikutnya.
g. Pengujian Rangkaian Mikrokontroler
Arduino Uno
Untuk mengetahui apakah rangkaian mikrokontroler Arduino Uno telah bekerja dengan baik, maka dilakukan pengujian. Pengujian bagian ini dilakukan dengan memberikan program pada mikrokontroler Arduino Uno. Program sederhana yang digunakan adalah blink led pada Pin 13 Arduino. Berikut adalah listing program dari blink led :
void setup() {
// initialize digital pin 13 as an output.
pinMode(13, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(13, HIGH); // turn the LED on
delay(1000); // wait for a second
digitalWrite(13, LOW); // turn the LED off
delay(1000); // wait for a second
}
Jika setelah upload program dilakukan
dan led berkedip setiap 1000 milisekon (1
detik) maka arduino dalam keadaan baik.
h. Pengujian Rangkaian Regulator Tegangan
Pengujian ini dilakukan untuk mengukur tegangan yang dihasilkan dari regulator tegangan LM7805. Regulator mengubah tegangan 12VDC dari Adaptor menjadi 5VDC untuk tegangan kerja perangkat keseluruhan. Pengukuran dilakukan menggunakan multimeter atau voltmeter. Berikut adalah hasil dari pengukuran tegangan, ditunjukan pada tabel 1 :
Tabel 1 Hasil Pengujian Regulator Tegangan 5VDC
No. Penguji
an
Hasil Pengukuran
(Volt)
Error
(Volt)
1 5,1 0,1
2 5,1 0,1
4 4,9 0,1
5 5 0
6 4,8 0,2
7 5,1 0,1
8 5 0
9 5,2 0,2
10 4,9 0,1
Σ Error 1,0
Rata – Rata Error 0,1
Berdasarkan data dari tabel di atas, disimpulkan bahwa error dari tegangan normal dengan tegangan regulator 5VDC memiliki total selisih error ± 01 Volt pada 10 kali pengujian (n) atau rata – rata error sebesar 0,1 Volt. Berdasarkan tabel diatas, dapat digambarkan pada grafik di bawah ini :
Gambar 13. Grafik Hasil Perbandingan Tegangan Normal dengan Regulator 5VDC
Terlihat hasil kedua pengujian hampir sama dengan selisih nilai pengukuran yang kecil. Kesimpulan dari pengujian ini adalah regulator tegangan 5VDC dapat dinyatakan berkerja dengan baik dan sesuai jika dibandingkan dengan tegangan kerja normal yaitu 5VDC.
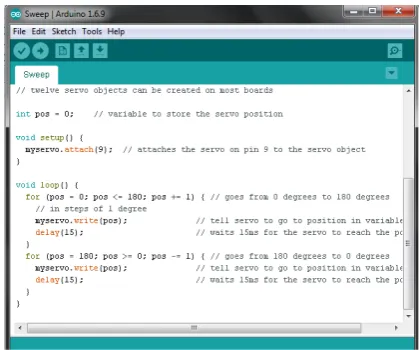
i. Pengujian Rangkaian Servo
Pengujian rangkaian servo dilakukan untuk mengetahui apakah motor servo dapat berkerja menggerakan mekanik pengukur panjang kaki dan lebar kaki dengan baik atau tidak. Pengujian ini dilakukan dengan mengakses setiap motor servo. Motor servo diberikan nilai minimum dan maksimun dari nilai servo setiap 1000 milisekon (1 detik). Berikut adalah
gambar code untuk melakukan pengujian servo :
Gambar 14. Listing Program Pengujian Motor Servo
j. Pengujian Rangkaian Servo
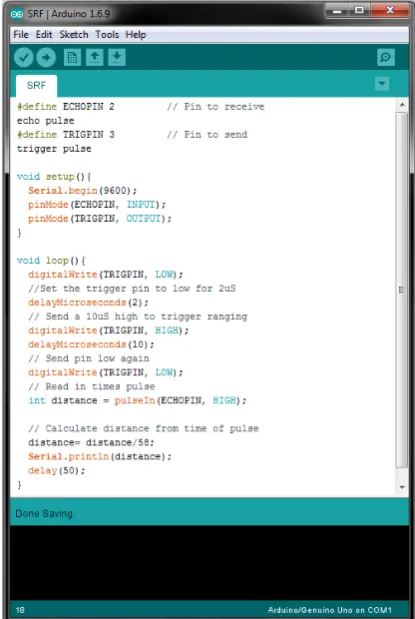
SRF04 sebagai sensor jarak yang mengirimkan data jarak terhadap objek. Pengujian ini dilakukan dengan mencoba mengirimkan data jarak ke mikrokontroler. Data pembanding yang digunakan adalah penggaris dengan pengambilan data 10 cm – 40 cm.
Gambar 14. Pengujian Rangkaian Sensor Jarak SRF04
Berikut listing program untuk menampilkan data sensor jarak SRF04 dalam cm :
#define ECHOPIN 2 // Pin to receive
echo pulse
trigger pulse
void setup(){
Serial.begin(9600);
pinMode(ECHOPIN, INPUT);
pinMode(TRIGPIN, OUTPUT);
}
void loop(){
digitalWrite(TRIGPIN, LOW);
//Set the trigger pin to low for 2uS
delayMicroseconds(2);
// Send a 10uS high to trigger ranging
digitalWrite(TRIGPIN, HIGH);
delayMicroseconds(10);
// Send pin low again
digitalWrite(TRIGPIN, LOW);
// Read in times pulse
int distance = pulseIn(ECHOPIN, HIGH);
// Calculate distance from time of pulse
distance= distance/58;
Serial.println(distance);
delay(50);
}
Gambar 14. Listing Program Pengujian Motor Servo
4. KESIMPULAN DAN SARAN 4.1. Keimpulan
Setelah perancangan pengukur kaki dan penentu ukuran sepatu ini dilakukan pengujian dan analisa, sehingga didapatkan kesimpulan sebagai berikut:
1. Dengan adanya perangkat ini, maka kita dapat mengukur panjang dan lebar kaki serta pembantu sebagai penentu ukuran sepatu sesuai dengan ukuran kaki pengguna yang telah diukur.
2. Penggunaan Arduino Uno sebagai pengendali utama, motor servo sebagai output penggerak mekanik dan sensor jarak SRF04. Perancangan mekanik pengukur kaki menggunakan 2 buah motor servo yaitu 1 motor servo mengukur panjang dan 1 unit motor servo mengukur lebar kaki. 3. Kecepatan respon sensor infrared dan
photodioda sangat baik dalam mendeteksi adanya kaki yang akan diukur.
– 30 cm dikarenakan keterbatasan mekanik perangkat.
5. Perangkat ini hanya digunakan sebagai referensi atau pembantu dalam menentukan ukuran sepatu.
6. Perangkat pengukur kaki dan penentu ukuran sepatu bekerja menggunakan power supply 12 VDC 1A dan regulator LM7805 dengan hasil regulasi tegangan sebesar 5VDC.
4.2. Saran
Dalam perancangan pengukur kaki dan penentu ukuran sepatu terdapat beberapa kendala yang dihadapi penulis. Maka penulis akan menyampaikan beberapa saran yang diharapkan pembaca dapat memahami prinsip perangkat yang dirancang sehingga dapat mengembangkan skripsi ini. Adapun saran – saran tersebut adalah:
1. Perancangan mekanik pengukur kaki kurang fleksibel dan jarak pengukuran terbatas. Diharapkan kedepannya dilakukan perancangan mekanik dirancang dengan sistem yang lebih sempurna.