LAPORAN KEMAJUAN
PENELITIAN iCAR
DANA ITS 2020
Pengembangan Sistem Mekatronika dan Interface Cerdas pada
Platform Mobil Otonomus ITS
Tim Peneliti :
Hendro Nurhadi, Dipl.-Ing., Ph.D. (Teknik Mesin Industri/Vokasi)
Andhika Etiyono, ST., MT (Desain Produk Industri/Desain Kreatif dan Bisnis Digital)
M. Lukman Hakim, ST., MT (Teknik Mesin Industri/Vokasi)
Dr. Irhamah, S,Si., M.Si. (Statistika /Matematika, Komputasi, dan Sains Data)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
Daftar Isi
Daftar Isi ... i
Daftar Gambar ... ii
Daftar Lampiran... iii
BAB I RINGKASAN ... 1
BAB II HASIL PENELITIAN ... 2
BAB III STATUS LUARAN ... 9
BAB IV KENDALA PELAKSANAAN PENELITIAN ... 10
BAB V RENCANA TAHAPAN SELANJUTNYA ... 11
BAB VI DAFTAR PUSTAKA ... 12
BAB VII LAMPIRAN ... 12
Daftar Gambar
Gambar 1 Sifat mekanik dari AISI 1045 ………. 2
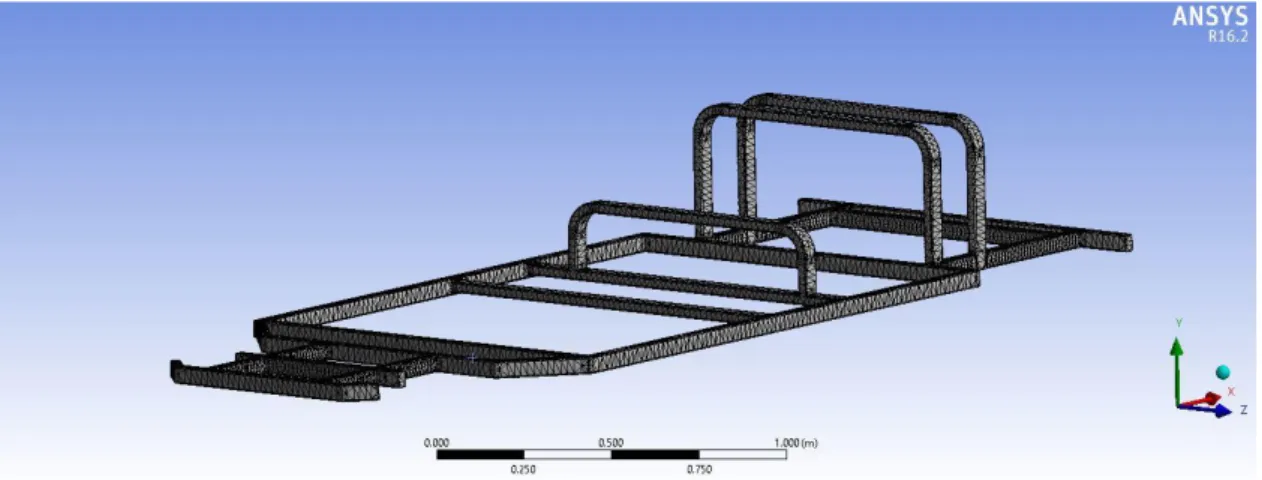
Gambar 2 Proses meshing beserta bentuk model 3D chassis ……….. 2
Gambar 3 Pembebanan twisted load pada bagian depan kendaraan ……… 3
Gambar 4 Deformasi total beban torsi ………. 3
Gambar 5 Tegangan ekivalen maksimum beban torsi ……….. 3
Gambar 6 Kondisi pembebanan beban bending ……… 4
Gambar 7 Deformasi total beban bending ………. 4
Gambar 8 Tegangan ekivalen maksimum beban bending ………. 5
Gambar 9 Free body diagram single track ……… 5
Gambar 10 Grafik radius belok terhadap kecepatan ………. 7
Gambar 11 Grafik yaw rate terhadap kecepatan ……… 7
BAB I RINGKASAN
Dewasa ini teknologi di dunia otomotif semakin berkembang. Salah satunya adalah mobil tanpa awak (autonomus car). Autonomus car adalah suatu kendaraan yang mampu bergerak sendiri tanpa campur tangan manusia. Autonomus car menggunakan beberapa fitur seperti sensor lidar, GPS, radar dan bebarapa komponen lain sebagai penunjang untuk mengenali lingkungan sekitarnya.
Salah satu bagian penting dari sebuah kendaraan terutama autonomus car adalah chassis. Konstruksi dari sebuah chassis sendiri diharuskan memiliki kekakuan dan kekuatan yang mampu menahan guncangan, tekanan, dan getaran yang terjadi pada kendaraan. Desain dari suatu chassis harus melalui kalkulasi yang dalam agar didapatkan chassis yang mampu menahan beban total yang diterima oleh kendaraan.
Untuk menjembatani tahap desain dan kalkulasi desain diperlukan simulasi untuk menganalisa kekuatan struktur pada chassis kendaraan. Sebelum analisa dilakukan, desain dari chassis sendiri dibuat dalam bentuk 3D model mengggunakan software Solidworks. Selanjutnya 3d model tersebut dianalisa secara finite
element method menggunakan software Ansys.
Selain ditinjau dari kekuatan struktur, bagaimana sebuah kendaraan bergerak juga perlu diperhatikan. Beberapa software pemodelan mampu menunjang untuk melakukan analisa kendaraan yang bergerak. Salah satu pemodelan yang dapat digunakan untuk menganalisa kendaraan bergerak yaitu pemodelan single track.. Single track sendiri merupakan pemodelan gerak yang mengacu pada 3 variabel yaitu radius belok, yaw rate dan sudut slip.
BAB II HASIL PENELITIAN
A. Analisa Finite Element Method
Sebelum analisa FEM dilakukan, chassis terlebuh dahulu didesain menggunakan software Computer Aided Drawing (CAD) yaitu Solidworks berdasarkan pengukuran langsung pada kendaraan autonomus. Setelah mendapatkan bentuk 3D dari chassis, dilanjutkan ke tahap simulasi menggunakan software Computer Aided Engineering (CAE) yaitu Ansys Workbench. Cakupan analisa FEM yang dilakukan yaitu pembebanan torsi dan bending. Material yang digunakan pada chassis kendaraan menggunakan AISI 1045. Sifat mekanik dari AISI 1045 ditunjukkan datasheet material pada gambar 1
Gambar 1 Sifat mekanik dari AISI 1045
Pada tabel sifat mekanik AISI 1045, diketahui besar nilai Yield Strength (Sy) yaitu 530 MPa sedangkan nilai Ultimate Tensile Strength sebesar 625 MPa. Pada analisa FEM, meshing menggunakan metode tetrahedron element. Proses meshing beserta model 3D dari chassis autonomus ditunjukkan pada gambar 2.
Setelah proses meshing selanjutnya dilakukan analisa pembebenan torsi dan bending. Pada analisa pembebanan torsi, beban puntir (twisted load) pada kendaraan autonomus diletakkan pada bagian depan kendaraan. Skema pemebebanan twisted load ditunjukkan pada gambar 3. Sedangkan bagian belakang kendaraan diasumsikan fixed support. Deformasi total dan tegangan ekivalen yang terjadi pada kendaraan autonomus ketika diberikan twist load ditunjukkan berurutu pada gambar 4 dan gambar 5.
Gambar 3 Pembebanan twisted load pada bagian depan kendaraan
Gambar 4 Deformasi total beban torsi
Dari hasil analisa statis beban torsi dari simulasi FEM menggunakan software Ansys Workbench, didapatkan deformasi maksimum akibat beban torsi sebesar 5,9164 mm. Sedangkan besar tegangan ekivalen maksimum yang terjadi akibat beban torsi sebesar 184,3 MPa.
Selanjutnya untuk analisa statis beban bending. Pada chassis kendaraan diberikan 3 pembebanan yang ditunjukkan pada gambar 6. Terdapat 3 beban yang diterima oleh chassis kendaraan automus yaitu penumpang, motor DC dan aki. Ketiga pembebanan ini merupakan vertical load dengan arah gaya menuju sumbu Y negative dimana diasumsikan juga terdapat fix support yang menyokong bagian depan dan belakang chassis. Deformasi total dan tegangan ekivalen maksimum yang terjadi pada kendaraan autonomus ketika diberikan twist load ditunjukkan berurutu pada gambar 7 dan gambar 8.
Gambar 6 Kondisi pembebanan beban bending
Gambar 8 Tegangan ekivalen maksimum beban bending
Dari hasil analisa statis beban bending dari simulasi FEM menggunakan software Ansys Workbench, didapatkan deformasi maksimum akibat beban bending sebesar 5,146 mm. Sedangkan besar tegangan ekivalen maksimum yang terjadi akibat beban torsi sebesar 294,8 MPa. Mengacu pada sifat mekanik material AISI 1045 dimana besar nilai Sy 530 MPa, hasil tegangan ekivalen maksimum yang didapatkan pada analisa statis beban bending lebih kecil dibandingkan nilai yield strength material AISI 1045.
B. Pemodelan Gerak Belok Single Track
Pemodelan gerak belok yang dipakai untuk pemodelan gerak belok menggunakan model single track. Single track sendiri merupakan pemodelan gerak yang mengacu pada 3 variabel yaitu radius belok, yaw rate dan sudut slip. Beberapa asumsi dibutuhkan dalam proses pemodelan antara lain :
• Kecepatan kendaraan konstan, tidak ada akselerasi dan deselarasi mendadak • Kekakuan system suspensi pada saat belok diabaikan
• Gerak rolling dan pitching diabaikan • Sudut chamber roda diabakan • Perilaku dan karateristik ban linier
Free body diagram dari model single track ditnjukkan pada gambar 9.
Persamaan yang dihasilkan dari gambar 9 sebagai berikut Σ𝐹𝑦= 𝑚. 𝑅̈𝑦 2𝐹𝑦𝑓+ 2𝐹𝑦𝑟 = 𝑚𝑉(𝛽̇ + 𝑟) −2𝐾𝑓𝛽𝑓− 2𝐾𝑟𝛽𝑟 = 𝑚𝑉 ( 𝑑𝛽 𝑑𝑡 + 𝑟) Σ𝑀𝑧 = 𝐼 𝑑𝑟 𝑑𝑡 2𝑙𝑓− 2𝑙𝑟𝐹𝑦𝑟= 𝐼 𝑑𝑟 𝑑𝑡 −2𝑙𝑓𝐾𝑓𝛽𝑓+ 2𝑙𝑟𝐾𝑟𝛽𝑟 = 𝐼 𝑑𝑟 𝑑𝑡 Dimana persamaan sudut slip roda depan dan belakang sebagai berikut
𝛽𝑓 = 𝛽 + 𝑙𝑓𝑟 𝑉 − 𝛿 𝛽𝑟 = 𝛽 − 𝑙𝑟𝑟 𝑉
Persamaan di atas merupakan persamaan gerak kendaraan model single track dimana respon variable gerak belok kendaraan berupa sudut slip (𝛽) dan yaw rate (r). Adapun parameter input pada pemodelan gerak belok model single track antara lain :
• Massa dan inersia kendaraan
• Kecepatan (V) dan susut kemudi roda (𝛿) • Cornering stiffness ban (𝐾𝑓) dan (𝐾𝑟)
• Centre gravity kendaraan (𝑙𝑓) dan (𝑙𝑟)
Pemodelan single track yang digunakan dalam kondisi steady state, dimana perubahan karateristik kendaraan dari sudut slip dan yaw rate terhadap waktu diabaikan. Sehingga persamaan gerak kendaraan model single track dapat disederhanakan menjadi berikut
𝜌 = (1 − 𝑚 2𝑙2 𝑙𝑓𝐾𝑓− 𝑙𝑟𝐾𝑟 𝐾𝑓𝐾𝑟 𝑉2)𝑙 𝛿 𝑟 = 1 1 −2𝑙𝑚2𝑙𝑓𝐾𝑓𝐾− 𝑙𝑟𝐾𝑟 𝑓𝐾𝑟 𝑉 2 𝑉 𝑙 𝛿 𝛽 = ( 1 −2𝑙𝑚2𝑙𝑙𝑓 𝑟𝐾𝑟𝑉 2 1 − 𝑚 2𝑙2 𝑙𝑓𝐾𝑓− 𝑙𝑟𝐾𝑟 𝐾𝑓𝐾𝑟 𝑉 2 ) 𝑙𝑟 𝑙 𝛿
Persamaan gerak belok single track steady state di atas kemudian disimulasikan ke Matlab menghasilakan output sebagai berikut
Gambar 10 Grafik radius belok terhadap kecepatan
BAB III STATUS LUARAN
Status Luaran berisi status tercapainya luaran wajib yang dijanjikan dan luaran tambahan (jika ada). Uraian status luaran harus didukung dengan bukti kemajuan ketercapaian luaran di bagian bab Lampiran
BAB IV KENDALA PELAKSANAAN PENELITIAN
Adapun beberapa kendala saat penelitian berjalan sebagai berikut :
1. Timeline waktu padat sehingga proses pelaksanaan penelitian sangat tergesa-gesa
2. Sempat berpindahnya tempat pengerjaan dari Sidoarjo ke Surabaya sehingga mobilitas tim terganggu
BAB VI RENCANA TAHAPAN SELANJUTNYA
Adapun rencana tahapan selanjutnya dalam penelitian ini antara lain : 1. Pemodelan steering pada kendaraan
BAB VII DAFTAR PUSTAKA
Kriswono, A., Abubakar, M., Suryaputra, H., & Noviantoro , B. (2017). Desain dan Analisis
Statik Rangka Chassis Square Bar dengan FEM. ITB.
Schramm, D. (2014). Vehicle Dynamics, Modelling and Simulation. Heidelberg: Springer.
Wasiwatono , U., & Prayitno, Y. (2016). Pemodelan Gerak Belok Steady State dan Transient pada
Kendaraan Empat Roda. Jurnal Teknik ITS.
BAB VIII LAMPIRAN
Lampiran berisi tabel daftar luaran (Format sesuai lampiran 1) dan bukti pendukung luaran wajib dan luaran tambahan (jika ada) sesuai dengan target capaian yang dijanjikan