Computer Vision Aplikasi Simulasi 3D Gerombolan Ikan Dalam
Akuarium Virtual Dengan Metode Potential Field
(Studi Kasus : Menghindari Penghalang Statis)
Adhiswara Mangala1, Memen Akbar2, Meilany Dewi3 1
Program StudiTeknik InformatikaPoliteknik Caltex Riau, Pekanbaru 28265; [email protected]
2
Program Studi Teknik Komputer Politeknik Caltex Riau, Pekanbaru 28265; [email protected] 3
Program Studi Teknik Informatika Politeknik Caltex Riau, Pekanbaru 28265; [email protected] Abstrak
Saat ini, teknologi komputer sangat berkembang pesat. Dunia nyata dapat divisualisasikan melalui animasi. Visualisasi tersebut dapat dikembangkan untuk penelitian, pembelajaran, pengembangan permainan, dan sebagainya. Salah satu contoh di dunia nyata yang dapat divisualisasikan adalah kehidupan di dalam akuarium. Penelitian ini menghasilkan suatu animasi simulasi dari sekelompok ikan yang dimodelkan dengan bentuk bola di dalam akuarium virtual yang bergerak menuju suatu tujuan. Dalam pergerakannya, terdapat kemungkinan terjadi tabrakan antara sesama ikan maupun tabrakan antara ikan dengan hambatan statis. Algoritma potential field digunakan untuk pergerakan ikan menuju tujuan sekaligus untuk menghindari hambatan ketika ikan bergerak dari posisi awal menuju tujuan. Pada hasil penerapan algoritma ini, jumlah ikan sangat mempengaruhi jumlah tabrakan antara sesama ikan maupun tabrakan ikan dengan hambatan.
Kata kunci :Potential Field, pergerakan gerombolan ikan,hambatan statis
Abstract
Nowadays, there are a lot of software and computer models. In this technology era, the life of world can be visualized through animation. The visualization can be developed into a research, learning, the toys development and so forth. For instance is the life inside aquarium. In this research, the writer is going to create a visualization of a group of fish in virtual aquarium. Systematically, the writer create the models of fish in the first step. The model is proccessed by using the language of C++, which there are some the groups of fish and some simple objects inside the aquarium are unmoveable is called as obstacle object. The fish are going to move in group and not crushing to the obstacle objects by using The Potential Field Method.
Keywords :Potential Field, The Movement of Groups of Fish, Statis Obstacle
1 Pendahuluan
Saat ini teknologi komputer berkembang dengan pesat, perkembangan ini telah dimanfaatkan dalam berbagai bidang kehidupan manusia.Salah satunya adalah pada bidang multimedia yang mencakup teks, gambar, suara, video, dan animasi.Awalnya, animasi komputer ditemukan dalam bentuk 2Ddan terus berkembang sehingga ditemukan animasi 3D. Tidak hanya sampai disitu, telah dilakukan penelitian lebih lanjut yang memungkinkan pembuatan animasi yang mendekati kondisi yang sebenarnya pada dunia nyata.Perkembangan animasi dapat dimanfaatkan untuk membuat visualisasi keadaan dunia nyata ke komputer, yang kemudian dapat digunakan dalam pengamatan untuk penelitian, pembelajaran, pengembangan permainan, dan sebagainya.Salah satu contoh di dunia nyata yang dapat divisualisasikan adalah kehidupan di dalam akuarium.Akuarium virtual merupakan bentuk maya tiga dimensi dari akuarium biasa yang dibuat menggunakan bahasa pemrograman tertentu sesuai dengan kondisi lingkungan tempat tinggal ikan.proyek akhir ini membahas tahap awal dari visualisasi akuarium virtual,
yaitu pemodelan ikan 3D yang dapat menghindari hambatan statis dengan menggunakan metode
Potential Field.
Adapun tujuan dari pembuatan penelitian ini adalah : 1. Bagaimana memodelkan ikan dalam bentuk 3D.
2. Bagaimana menggerakkan ikan yang telah dibuat dengan metode Potential Field sehinga tidak berbenturan antara sesama ikan ataupun dengan hambatan statis .
3. Bagaimana mengetahui maksimum jumlah ikan pada akuarium yang dibuat sehingga tidak terjadi benturan.
Sedangkan manfaat yang diperoleh dari penelitian ini adalah :
1. Bagi pengguna, dapat melihat visualisasi pergerakan segerombolan ikan tanpa harus pergi ke habitat asli ikan atau memiliki akuarium.
2. Bagi penulis, dapat mengetahui tingkat keoptimalan algoritma Potential Field pada permasalahan pergerakan segerombolan ikan.
3. Mengetahui maksimum jumlah ikan pada akuarium yang dibuat sehingga tidak terjadi benturan. Permasalahan yang dihadapi dalam pembuatan penelitian ini adalah :
1. Bagaimana memodelkan ikan dalam bentuk 3D.
2. Bagaimana menggerakkan ikan yang telah dibuat dengan metode Potential Field sehinga tidak berbenturan antara sesama ikan ataupun dengan hambatan statis .
3. Bagaimana mengetahui maksimum jumlah ikan pada akuarium yang dibuat sehingga tidak terjadi benturan.
2 Tinjauan Pustaka 2.1 Computer Vision
Computer Vision adalahsuatu bidang ilmu yang menggunakan teknik komputer digital untuk mengekstrak, mencirikan, dan menginterpretasi informasi pada citra visual dari dunia 3D. Tujuan utama dari Computer Vision adalah memungkinkan sistem rekayasa untuk memodelkan dan memanipulasi lingkungan dengan menggunakan visual sensing.[1]
2.2 Ikan
Ikan adalah hewan vertebrata/ hewan berdarah dingin yang hidup di air dan bernafas dengan insang.Ada lebih dari 27.000 spesies ikan yang hidup di seluruh dunia. Secara umum, ikan terbagi dalam tiga kelompok, yaituikan tanpa rahang (kelas Agnatha), ikan bertulang rawan (kelas Chondrichthyes), dan sisanya tergolong ikan bertulang keras(kelas Osteichthyes).
2.3 Simulasi
Simulasi didefinisikan sebagai sekumpulan metode dan aplikasi untuk menirukan atau mempresentasikan perilakiu dari suatu sistem nyata, yang biasanya dilakukan pada komputer dengan menggukan perangkat lunak tertentu.[2]
2.4 Kecerdasan Buatan
Kecerdasan buatanatau Artificial Intelligence (AI) merupakan cabang ilmu komputer yang khusus ditujukan untuk membuat software dan hardware yang sepenuhnya bisa meniru beberapa fungsi otak mahluk hidup. Ini menunjukkan bahwa AI adalah bagian dari komputer sehingga harus didasarkan pada sound theoretical (teori suara) dan prinsip-prinsip aplikasi dari bidangnya.[3]
2.5 Animasi
Animasi adalah proses merekam dan memainkan kembali serangkaian gambar statis untuk mendapatkan suatu ilusi pergerakan. Secara garis besar, animasi terdiri dari Computer
Assisted Animation dan Computer Generated Animation.[4]
2.6 Potential Field
Ide Potential Fielddiambildari alam dan dikembangkan oleh Andrews dan Hogan pada tahun 1983 (Mifta dkk, (t.t)).[5]. Misalnyasebuah partikel bermuatanmedan magnet, terdapat medan magnet positif dan negatif yang dapat terjadi penarikan ataupun penolakan.Ketika dua benda yang bermedan magnet berbeda berada pada jarak tertentu maka kedua benda akan saliang tarik-menarik. Sedangkan ketika dua benda yang bermedan magnetsama berada pada jarak tertentu maka kedua benda akan saling tolak-menolak.
Sistem kerja Potential Field adalah dengan memberi nilai yang tinggi pada daerah dekat target dan nilai akan semakin berkurang jika jaraknya semakin jauh dari target. Setiap Potential
Field mempunyai radius aksi.Kekuatan yang diberikan bisa berupa tarikan ataupun dorongan.
Konsep dasar metode Potential Field digambarkan seperti partikel besi yang begerak menuju objek melalui medan magnet yang dibuat oleh objek yang dituju. Pergerakan ini tergantung dari medan magnet yang ada, partikel akan ditarik kearah tujuan atau justru sebaliknya partikel besi tersebut akan ditolak oleh medan magnet pada saat bertemu halangan. 2.7 Potential Field Atraktif
Menurut Arik dkk (2010),Potential field Aktraktif adalah potential field yang mengatur bagaimana setiap agen yang ada bergerak mengarah ke tujuan. Perhitungan nilai potential field tujuan, didapatkan dari konsep potential field dari elektrostatika, yaitu dengan menggunakan Persamaan(1) :
Vga= V * (-λ * Xga)
(1) Dimana:
V = Konstanta potential field Λ = Konstanta
Vga = Potential field untuk tujuan
Xga = Jarak ke tujuan
= exponential
Persamaan diatas dapat digunakan untuk menentukan nilai potential field Aktraktifdengan memanfaatkan puncak gundukan. Dalam artian, semua partikel yang berada di bawah nilai puncak gundukan tersebut akan tertarik ke puncak gundukan (yang mempunya nilai tertinggi). Jadi dapat diibaratkan puncak gundukan adalah target yang akan dituju.
2.8 Potential Field Repulsif
Potential field Repulsif adalah potential field yang mengatur bagaimana setiap agen dapat
menghindari halangan (obstacle) yang ada. Perhitungan nilai potential field halangan, didapatkan dari konsep potential field dari elektrostatika dengan menggunakan Persamaan (2) :
V go=-V * (-λ * Xgo)
(2) Dimana:
V = Konstanta potential field halangan Λ = Konstanta
Vgo = Potential field untuk obstacle
= exponential
Persamaan (2) jika dimanfaatkan untuk menghitung nilai potential Field Repulsif, maka partikel tidak akan tertarik ke puncak gundukan. Namun sebaliknya, partikel akan menolak dan berlari menuju nilai yang lebih tinggi.
3 Perancangan Aplikasi 3.1 Diagram Alir
Diagram alir pada penelitian ini terdiri dari diagram alir pembuatan simulasi, dan diagram alir algoritma Potential Field.
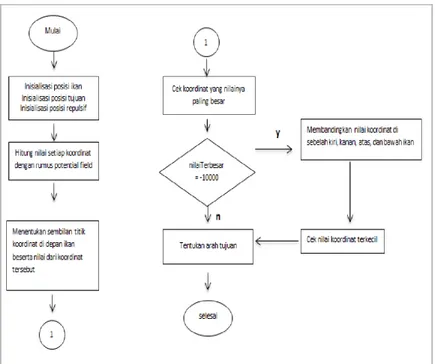
3.1.1 Diagram Alir Algoritma Potential Field
Tahap awal pergerakan gerombolan ikan menggunakan algoritma Potential Field adalah pengguna menginputkan jumlah ikan minimal 1 dan maksimal 144000,posisi ikan akan ditentukan secara acak. Kemudiandilakukan perhitungan untuk memberi nilai setiap koordinat. Setelah semua perhitungan sudah selesai, masuk kebagian pergerakan ikan. Dimana ikan bergerak dengan membaca sembilan koordiat didepan ikan dan menentukan nilai terbesar. Kemudian ikan akan menuju kekoordinat yang terbesar. Jika nilai terbesar adalah -10000 yang merupakan daerah hambatan, maka ikan akan membaca koordinat di kiri, kanan, atas, dan bwah. Ikan akan menuju kekoordinat yang nilainya terkecil. Gambar 1 menunjukkan diagram alir algoritma Potential Field.
Gambar 1 Diagram Alir Algoritma Potential Field
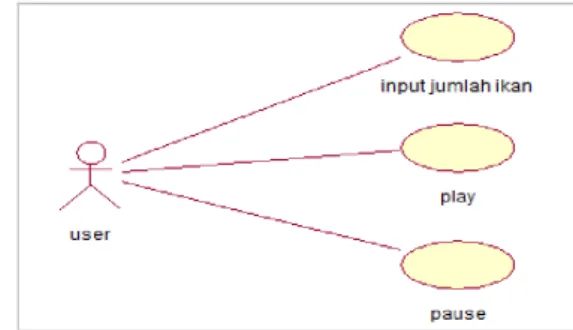
3.2 Use Case Diagram
Pada Use Case Diagram ini, objek ikan dapat mendeteksi hambatan, mengubah posisi, menghitung tabrakan, seperti ditampilkan pada Gambar 2.
.
Gambar 2 Use Case Diagram Objek Ikan
4 Pengujian dan Analisa 4.1 Hasil dan Simulasi
Terdapat tiga tampilan dalam simulasi, yaitu tampilan awal untuk menginputkan nilai parameter-parameter kontrol, tampilan simulasi pergerakan ikan, dan tampilan akhir yang menampilkan hasil dari simulasi.
4.1.1 Tampilan Awal Simulasi
Pada awal simulasi munculconsole untuk menginputkan jumlah ikan. Tampilan awal simulasiakan ditunjukkan pada Gambar 3.
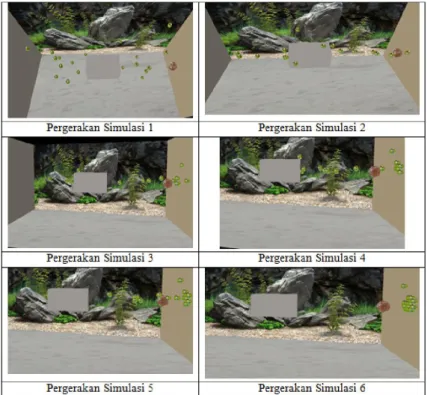
Gambar 3 Tampilan Awal Simulasi 4.1.2 Tampilan Simulasi
Setelah penginputan selesai maka simulasi akan berjalan. Posisi awal semua ikan diacak sedangkan posisi sumber tujuan dan hambatan tetap.Ikan bergerak menuju tujuan dengan menerapkan algoritma Potential Field untuk pergerakan ikan dan penghindaran hambatan.Di dalam akuarium terdapat satu hambatan statis yang terletak di tengahakuarium.Tampilan simulasi akan ditunjukkan pada Gambar 4.
Gambar 4 Tampilan Simulasi 4.1.3 Tampilan Akhir Simulasi
Pada akhir simulasi akan muncul console yang menampilkan hasil dari simulasi, yaitu jumlah terdeteksi akan terjadi tabrakan antar ikan, jumlah terdeteksi akan terjadi tabrakan antara ikan dengan hambatan. Gambar 5 menunjukkan tampilan akhir simulasi.
4.2 Pengujian
Pada penelitian simulasi ini, dilakukan pengujian dengan dua cara, yaitu pengujian menggunakan kuesioner mengenai pergerakan, penghindaran hambatan, dan kemiripan dengan pergerakan di dunia nyata serta pengujian mengenai penerapan algoritma Potential Field. 4.2.1 Pengujian Kuesioner
Dilakukan pengujian menggunakan kuesionerkepada 20 (dua puluh) pengguna terdiri dari pengujian mengenai pergerakan segerombolan ikan menuju sumber makanan, pergerakan segerombolan ikan menghindari hambatan dinamis, dan kemiripan pergerakan terhadap dunia nyata. Hasil pengujian simulasi dengan kuesioner dapat dilihat pada Tabel 1.
Tabel 1 Hasil Pengujian Simulasi
No Pernyataan
Alternatif Jawaban Sangat
Bagus Bagus Sedang
Tidak Bagus Sangat Tidak Bagus 5 4 3 2 1
1 Pergerakan gerombolan ikan
menuju tujuan 9 10 1 0 0
2 Pergerakan gerombolan ikan
menghindari hambatan statis 7 9 4 0 0
3 Kemiripan pergerakan menuju tujuan
dengan dunia nyata 4 12 4 0 0
4.2.2 Pengujian Parameter Kontrol
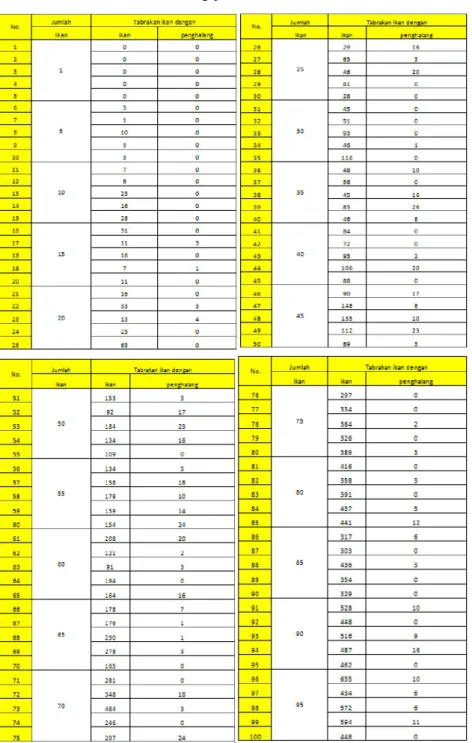
Pengujian parameter kontrol dilakukan dengan cara menginputkan jumlah ikan. Kemudian mencatat output dari hasil kombinasi tersebut, yaitu nilai jumlah tabrakan sesama ikan dan jumlah tabrakan ikan dengan hambatan. Pengujian dilakukan sebanyak 100 (seratus) kali percobaan.Hasil pengujian parameter kontrol dapat dilihat pada Tabel 2.
Tabel 2 Pengujian Parameter Kontrol
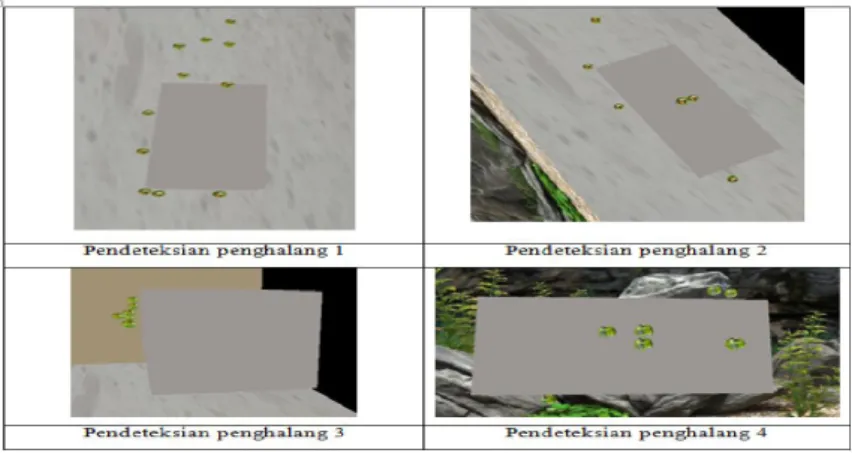
Metode Potential Field terhitung akuratuntuk penghindaran hambatan. Gambar 6 menunjukkan ikan mencari jalur lain ketika ikan menemukan penghalang.
Gambar 6 Pendeteksian Penghalang
Metode Potential Field juga dapat digunakan untuk menghindari terjadinya tabrakan sesama ikan. Untuk penghindaran sesama ikan dapat dilihat pada Gambar 7.
Gambar 7 Pendeteksian Tabrakan Antara Sesama Ikan
5 Kesimpulan dan Saran 5.1 Kesimpulan
Kesimpulan yang diperoleh dari penelitian ini adalah:
1. Dari hasil kuesioner, pergerakan gerombolan ikan menuju tujuan sangat bagus dengan persentase 88%, pergerakan gerombolan ikan menghindari hambatan statis sangat bagus dengan persentase 83% dan kemiripan pergerakan menuju tujuan dengan yang sebenarnya sebesar 80%.
2. Jumlah ikan mempengaruhi besarnya jumlah tabrakan sesama ikan dan jumlah tabrakan ikan dengan penghalang.
3. Agar tabrakan tidak terjadi, jumlah ikan kurang dari sepuluh.
5.2 Saran
Adapun saran untuk penelitian ini adalah sebagai berikut :
1. Memperbagusinterface pada tampilan awal dan akhir simulasi agar lebih menarik. 2. Menggunakan algoritma Polinom Lagrange agar pemodelan ikan lebih bagus. 3. Ikan dilengkapi dengan arah tujuan agar ikan kelihatan lebih hidup.
4. Menggunakan Algoritma Dijkstra, Algoritma Bellman-Ford, atau Algoritma Floyd-Warshall untuk menemukan jalurterpendek.
Daftar Pustaka
[1] Zhihui, Xiong. (2008). Computer Vision. Croatia: In-The.
[2] Suryani, Erma. (2006). Pemodelan & Simulasi. Yogyakarta: Graha Ilmu.
[3] Suparman, & Marian. (2007). Komputer Masa Depan Pengenalan Aritificial
Intelligence.Yogyakarta: Penerbit Andi.
[4] Fernandes, Ibiz. (2002).Macromedia Flash Animation & Cartooning. California: McGraw-Hill/Osborne.
[5] Prasetya, Roni Mifta, dkk. (t.t). Prototipe R Robot Pemimpin untuk Implementasi Robot