BAB II
DASAR TEORI
Pada Bab ini dibahas mengenai dasar teori dan hubungan antar perangkat keras yang digunakan yaitu mikrokontroler, SRF-05, photointerrupter, bluetooth HC-05. Selain itu juga akan dibahas perangkat lunak yang digunakan untuk membuat program aplikasi berbasis android sistem berikut ini beberapa teori pendukung yang digunakan sebagai acuan skripsi ini.
2.1. Kajian Pustaka
PEMBUATAN PERANGKAT LUNAK BERBASIS DIAGRAM ALIR UNTUK MENGONTROL ROBOT
Pada [1] dijalaskan tentang perancangan robot dengan pengendali menggunakan diagram alir dengan cara membuat suatu perangkat lunak berbasis diagram alir menggunakan simbol-simbol dari tiap blok diagram yang memiliki perintah untuk menggerakkan robot. Perintah ini berupa source code yang dikirim dari PC ke mikrokontroler AT89S52. Mikrokontroler menampilkan simulasi berdasarkan diagram alir yang dibuat pada perangkat lunak. Simulasi output dari perangkat lunak ditunjukkan pada port 0 mikrokontroler, sedangkan simulasi input dari perangkat lunak ditunjukkan pada port 1 mikrokontroler. Simulasi output yang dihasilkan sesuai dengan diagram alir pada perangkat lunak, yang dibuat dapat digunakan untuk mengontrol robot. Untuk dapat diimplementasikan secara langsung pada robot, diperlukan perangkat tambahan seperti driver, ADC (analog to digital converter), DAC (digital to analog converter).
2.2. Diagram Alir
dapat membantu dalam membuat source code karena logika dari program tersebut telah dirancang di dalam diagram alir. Diagram alir dapat digunakan mulai dari bahasa pemrograman tingkat rendah sampai dengan bahasa pemrograman tingkat tinggi. Pemrograman fungsional ataupun pemrograman berorientasi objek, semuanya menggunakan diagram alir dalam analisis pembuatan design nya.
Tabel 2.1 Tabel diagram alir [2]
2.3. Perangkat Keras
2.3.1. Mikrokontroler AT-Mega 328
Arduino adalah sebuah board mikrokontroler yang berbasis At-Mega 328. Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM (Pulse with modulation), 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, ICSP, dan tombol reset. Arduino mampu men-support mikrokontroler dapat dikoneksikan dengan komputer menggunakan kabel usb.
Gambar 2.1 Board Arduino Uno
0-5 kita ubah menjadi pin 14-19. dengan kata lain pin analog 0-5 berfungsi juga sebagi pin output digital 14-16 [3].
Berikut ini adalah konfigurasi dari Arduino uno: 1. Mikronkontroler At-Mega 328.
2. Beroperasi pada tegangan 5V.
3. Tegangan input (rekomendasi) 7 - 12V. 4. Batas tegangan input 6 - 20V.
5. Pin digital input/output 14 (6 mendukung output pwm). 6. Arus pin per input/output 40 mA.
7. Arus untuk pin 3.3V adalah 50 mA.
8. Flash Memory 32 KB (At-Mega 328) yang mana 2 KB digunakan oleh bootloader. 9. SRAM 2 KB (At-Mega 328).
10.EEPROM 1KB (At-Mega 328). 11.Kecepatan clock 16 MHz.
2.3.1.1. Sumber Tegangan pada Arduino
Arduino dapat diberikan power melalui koneksi usb atau power supply. Power supply dapat menggunakan adaptor dc atau baterai. Adaptor dapat dikoneksikan dengan menyambungkan jack adaptor pada koneksi port input supply. Board arduino dapat dioperasikan menggunakan supply dari luar sebesar 6 - 20 volt. Jika supply kurang dari 7 V, maka akan mengakibatkan pin 5 V akan menyuplai kurang dari 5 volt dan board bisa menjadi tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7 V sampai 12 V. Penjelasan pada pin power adalah sebagai berikut :
1. Vin (Tegangan input)
2. 5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh usb atau supply regulasi 5V lainnya.
3. 3V3
Suplay 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maksimal adalah 50mA.
4. Pin Ground
Berfungsi sebagai jalur ground pada arduino.
2.3.1.2. Memori
At-Mega 328 memiliki 32 KB (kilobyte) flash memory untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader. At-Mega 328 memiliki 2 KB untuk SRAM (Static Random Access Memory) dan 1 KB untuk EEPROM (Electrically Erasable Programmable Read-Only Memory).
2.3.1.3. Input dan Output
14 pin digital pada Arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maksimal 40 mA dan memiliki internal pull-up resistor (disconnected oleh default) 20-50 Kilo Ohm. Beberapa pin memiliki fungsi sebagai berikut :
2. Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah interupt pada low value, rising atau falling edge, atau perubahan nilai.
3. PWM (pulse with modulation) : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output pwm dengan fungsi analogWrite().
4. SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mensuport komunikasi spi, yang mana masih mendukung hardware, yang tidak termasuk pada bahasa arduino.
5. Led : 13. Ini adalah dibuat untuk koneksi led ke digital pin 13. Ketika pin bernilai High, led hidup, ketika pin low, led mati.
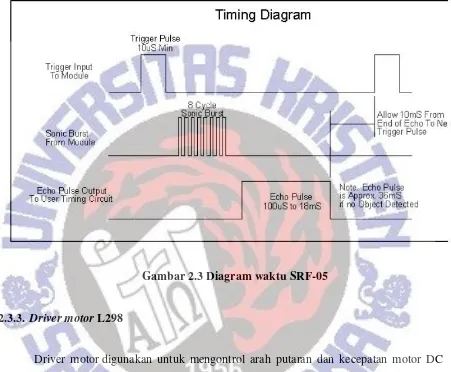
2.3.2. Sensor Ultra Sonic SRF-05
Sensor jarak adalah sebuah tranduser yang mampu mengukur jarak antara satu objek dengan objek lainnya. Sebuah robot yang memiliki kecerdasan dapat bergerak tanpa menabrak objek-objek yang ada di sekitarnya. Untuk itu diperlukan sensor jarak agar robot dapat mendeteksi keberadaan objek-objek di sekitarnya. SRF-05 menggunakan gelombang ultrasonik sebagai media pengukurannya
Gambar 2.2 Gambar SRF-05
Gambar 2.3 Diagram waktu SRF-05
2.3.3. Driver motor L298
Driver motor digunakan untuk mengontrol arah putaran dan kecepatan motor DC yang merupakan penggerak utama dari rangkaian proyek akhir ini. IC driver motor L298 yang di dalamnya terdapat rangkaian H-bridge akan mengontrol putaran motor sesuai data masukan digital yang berasal dari Mikrokontroler, dan pada IC L298 ini juga terdapat pin untuk pengaturan aplikasi PWM (Pulse Width Modulator) yang akan mengatur kecepatan motor DC yang dikendalikannya. L298 memiliki rangkaian dual H-bridge, sehingga mampu
mengendalikan dua buah motor DC sekaligus[5].
Karakteristik dari driver motor L298 adalah:
1. Tegangan operasi supply sampai dengan 36 Volt
3. Tegangan logic ”0” sampai dengan 1,5 Volt.
4. Memiliki dua Enable input.
Gambar 2.4 Driver motor L298
Fungsi dari tiap-tiap pindriver motor L298 adalah sebagai berikut:
1. Output 1 dan Output 2 (pin 2 dan pin 3)
Pin ini merupakan output untuk H-bridge A.
2. Vs (pin 4)
Merupakan pinsupply tegangan untuk output.
3. Input 1 dan Input 2 (pin 5 dan pin 7)
Pin ini digunakan untuk mengontrol H-bridge A.
4. Enable 1 dan Enable 2 (pin 6 dan pin 11)
Pin ini berfungsi untuk mengaktifkan dan menonaktifkan H-bridge A dan H-bridge B.
5. Ground (pin 8)
Berfungsi sebagai grounding rangkaian driver.
6. Vss (pin 9)
Pin ini berfungsi sebagai supply logic untuk driver.
Berfungsi sebagai masukan pada H-bridge B.
8. Output 3 dan Output 4 (13 dan 14)
Merupakan pinoutput untuk H-bridge B.
9. Current Sensing H-bridge A dan Current Sensing H-bridge B (1 dan 15)
Berfungsi untuk membatasi arus pada pin out dengan memasangkan resistor pada pin
tersebut kemudian di sambungkan dengan pin ground.
2.3.4. Photointerrupter
Photo Interrupter pada tugas akhir ini digunakan untuk menghitung putaran yang ada pada roda robot . Agar mendapatkan jarak dari robot tersebut saat berjalan. Caranya adalah dengan menempatkan sebuah piringan yg disertai lubang-lubang pada bibir piringan tersebut pada sebuah motor. Jumlah lubang yang dideteksi oleh photo-interrupter dalam selang waktu tertentu dapat merepresentasikan jarak dari robot tersebut saat berjalan [6].
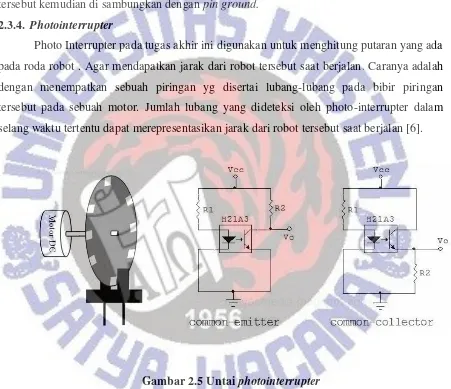
Gambar 2.5 Untai photointerrupter
Kedua rangkaian di atas mempunyai perhitungan nilai hambatan R1 & R2 yang sama, hanya saja logika outputnya yg berbeda.
Common-emittor
Common-collector
Jika terdapat halangan pada celah antara infrared dan phototransistor maka phototransistor akan menghasilkan output low, jika tidak terhalang output high.
Sedangkan untuk perhitungan nilai hambatannya untuk R1 pada transmiter dan R2 pada receiver adalah:
Bagian transmitter photo-interrupter terbuat dari sebuah led inframerah yang
mempunyai rating VF = 1,7 V dan IF = 20 mA (berdasarkan datasheet H21A3). Sehingga dibutuhkan hambatan input infrared sebesar :
Untuk menghindari kerusakan pada infrared, nilai hambatan input yang dipakai dapat diperbesar menjadi 180 Ω.
Bagian receiver photointerrupter terbuat dari phototransistor dengan rating
VCE(sat) = 0,4 V dan Ic(ON) = 4 mA
2.3.5. Bluetooth HC-05
Gambar 2.6 Bluetooth HC-05 Spesifikasi bluetooth HC-05 :
1. Menggunakan bluetooth Chip, dengan bluetooth standard ver.2.0. 2. Low supply voltage 3.3V.
3. Baudrate 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200, dapat di set sesuai dengan kebutuhan user.
4. Ukuran PCB : 28mm x 15 mm x 2.35mm.
5. Kebutuhan Arus : Pairing 20~30 mA. Setelah Pair: 8 mA.
6. Sleep Current:No Sleep.
7.Memiliki jangkauan 10 meter.
2.4. Perangkat Lunak
2.4.1. Eclipse IDE
Eclipse adalah sebuah IDE (Integrated Development Environment) yang digunakan
untuk mengembangkan perangkat lunak dan dapat dijalankan di semua platform/OS. Oleh
karena itu dinamakan dengan platform-independent. Berikut ini adalah sifat dari Eclipse:
1. Multi-platform: Target sistem operasi Eclipse adalah Microsoft windows, Linux, Solaris, AIX, HP-UX dan Mac OS X.
2. Multi-language: Eclipse dikembangkan dengan bahasa pemrograman Java, akan tetapi
Eclipse mendukung pengembangan aplikasi berbasis bahasa pemrograman lainnya,
seperti C++, Cobol Pyton, Perl, PHP, (hypertext prepocessor), dan lain sebagainya.
3. Multi-role : Selain sebagai IDE (Integrated Development Environment) untuk
pengembangan aplikasi, Eclipse pun bisa digunakan untuk aktivitas dalam siklus
pengembangan perangkat lunak, seperti dokumentasi, test perangkat lunak,
pengembangan web, dan lain sebagainya.
Eclipse pada saat ini merupakan salah satu IDE favorit dikarenakan gratis dan open
source, yang berarti setiap orang boleh melihat kode pemrograman perangkat lunak ini.
Selain itu, kelebihan dari Eclipse yang membuatnya populer adalah kemampuannya untuk
dapat dikembangkan oleh pengguna dengan komponen yang dinamakan plug-in.
2.4.2. Android Development Tools