115
Rancang Bangun Electroencephalograph (EEG)
Sebagai Perekam Dan Pendeteksi Sinyal Biolistrik
Otak Yang Terintegrasi Dengan PC Berbasis
Mikrokontroler ATMEGA8535
Okky Andriawan Eka Putera, Irmalia Suryani Faradisa
Jurusan Teknik Elektro, Institut Teknologi Nasional Malang e-mail: [email protected]
Abstrak—Salah satu organ tubuh yang mengeluarkan
sinyal-sinyal biolistrik adalah otak. Sinyal biolistrik yang dikeluarkan oleh otak ini dapat digunakan untuk mengetahui kelainan pada otak. Untuk menangkap sinyal-sinyal yang dikeluarkan oleh otak diperlukan suatu alat yang disebut dengan electroencephalograph (EEG). EEG bekerja dengan menangkap frekuensi sinyal-sinyal listrik yang dibangkitkan oleh otak akibat adanya aktivitas mental subjek.
Pada tulisan ini telah direalisasikan suatu alat electroencephalograph yang bersifat portable.yang terintegrasi dengan personal komputer (PC)
Kata kunci—Elektroda Ag-AgCl, methode of elctrode
placement,EEG
I. LATAR BELAKANG
Dalam berbagai bidang kehidupan peralatan elektronika sangat diperlukan. Dalam bidang kedokteran misalnya perkembangan zaman serta ilmu pengetahuan medis,hal ini menuntut peralatan yang dapat menunjang evektifitas penelitian, pemeriksaan serta terapi medis. Konsekuensi ini semua adalah peralatan medis yang semakin canggih serta efisien.
Salah satu alat yang digunakan untuk menunjang penelitian, pemeriksaan serta terapi medis adalah Electroencephalograph, yaitu alat yang digunakan oleh dokter-dokter ahli dalam bidang Neurologi.
Perekaman gelombang otak sampai saat ini hanya bisa dilakukan di rumah sakit saja. Ini karena alat EEG yang ada sangat mahal harganya,dan biaya untuk perekaman sinyal otak juga mahal sehingga diperlukan sebuah EEG yang portable dan mudah dioperasikan.
II.LANDASAN TEORI
A. Gelombang Otak[3]
Berikut adalah jenis jenis sinyal biolistrik otak berdasarkan frekuensi:
Gelombang Alfa, 8-13 Hz
Gelombang Beta, 14-25 Hz.
Gelombang Teta, 4-7 Hz
Gelombang Delta, < 4 Hz Gambar 1. Bentuk sinyal biolistrik otak [3].
Intensitas gelombang otak pada kulit kepala berkisar 0 sampai 300 uV, dan frekuensinya berkisar antara sekali sampai 50 kali putaran per detik atau lebih. Sifat gelombang ini sangat tergantung pada besarnya aktivitas di korteks serebri, dan gelombang otak jelas mengalami perubahan pada keadaan siaga, tidur dan koma.
B. Dasar-dasar Elektroencephalograph
Biolistrik otak dapat dideteksi melalui kulit tempurung kepala dan untuk mendeteksi sinyal tersebut dapat digunakan elektroda-elektroda yang dipasang pada kulit tempurung kepala.Elektroda harus dapat membuat kontak listrik yang stabil dengan kulit agar dapat melewatkan sinyal biolistrik yang sangat rendah. Elektroda yang sering digunakan adalah piringan kecil logam dengan diameter sekitar 0,27 mm (biasanya Ag-AgCl).
C. Metode Penempatan Elektroda [3]
Untuk merekam sinyal biolistrik otak ini ada 2 metode yang digunakan, yaitu metode bipolar dan unipolar.
Gambar 2. Lokasi penempatan elektroda [5].
Metode bipolar adalah metode sadapan sinyal dengan mengambil selisih tegangan antara dua titik pada bagian
116 frontal dan occipital, sehingga selisih potensial dari kedua
tempat dapat tercatat. Sedangkan metode unipolar adalah metode dimana satu titik dijadikan sebagai titik acuan,biasanya pada daun telinga,sedangkan yang lainnya diletakkan pada titik yang akan diperiksa pada sisi kepala yang sama. Perancangan ini menggunakan metode penyadapan bipolar
D. Sensor Elektroda
Sensor elektroda kulit merupakan sensor yang dapat digunakan untuk membantu mendeteksi sinyal biopotensial yang dikeluarkan tubuh manusia melalui kulit. Sensor tersebut dibuat dari bahan Ag│AgCl yang biasa disebut perak-perak klorida. Untuk mendapatkan kontak listrik dalam penggunaannya pada sensor ini terdapat pasta elektrolit yang terletak diantara elektroda dengan kulit. Konstruksi elektoda permukaan kulit ditunjukkan pada Gambar 3.
Gambar 3. Elektroda Kulit[7].
Spesifikasi dari elektroda kulit diatas adalah sebagai berikut: 1. Digunakan pada ECG,EEG dan EMG
2. Perlu kestabilan pada pengukuran orde puluhan mikro hingga mili volt
3. Umumnya dibentuk dengan cakram metal perak dengan lapisan perak nitrat sebagai elektroda reversible.
4. Pada pemakaian perlu pendukung agar tetap menempel pada kulit dan bila kestabilan kontak diperlukan kulit dilapisi dahulu dengan pasta konduktif.
III. PERANCANGAN DAN PEMBUATAN ALAT Sebelum melakukan perancangan dan pembuatan alat diperlukan sebuah diagram blok yang dapat menjelaskan mengenai sistem yang akan dirancang secara garis besarnya sehingga dapat berjalan sesuai dengan urutannya (sistematis) seperti yang diperlihatkan Gambar 4. Adapun fungsi dari tiap tiap blok diagram dijelaskan sebagai berikut. Elektroda Ag-AgCl. Berfungsi untuk menangkap sinyal biolistrik otak yang terdapat pada permukaan kulit tempurung kepala.
Pengkondisi Sinyal. Pengkondisi sinyal terdiri dari (a) Penguat instrumentasi berfungsi sebagai penguat selisih tegangan dari dua lokasi penempatan elektroda sekaligus menghilangkan sinyal noise dari kedua masukan, (b) Penguat non inverting berfungsi memberikan penguat tingkat kedua kepada sinyal yang telah melalui penguat instumentasi.
Rangkaian Filter. (a) Lowpass filter, digunakan untuk merekam sinyal dengan frekuensi 50 Hz dan meloloskan sinyal dibawahnya. (b) Bandpass filter alfa, berfungsi untuk meloloskan sinyal alfa yang mempunyai range frekuensi 8-13 Hz,dan meredam frekuensi diluar frekuensi tersebut, dan (c) Bandpass filter beta, berfungsi untuk meloloskan sinyal
beta yang mempunyai range frekuensi 14-25 hz, dan meredam frekuensi diluar frekuensi tersebut.
Gambar 4. Blok diagram sistem.
Mikrokontroller. Berfungsi menerima sinyal analog gelombang alfa dan beta dan mengirimkan data digital ke komputer melalui konektor DB9
Personal Komputer. Berfungsi untuk menyimpan semua data yang dibutuhkan dan mengolah informasi yang diterima dari komunikasi serial serta menampilkan data dengan menggunakan program Delphi.
A. Perencanaan sensor elektroda
Untuk dapat menangkap sinyal biolistrik otak yang terdapat pada kulit tempurung kepala maka dibutuhkan sensor elektroda jenis Ag-Agcl yang ditempelkan pada kulit kepala, perancangan pada alat ini menggunakan tiga buah sensor elektroda kulit jenis Ag-Agcl, input dari elektroda dilekatkan pada bagian depan kepala (Frontal) bagian atas telinga (Occipital) dan bagian bawah telinga sebagai ground. Output dari ketiga elektroda tersebut dimasukkan ke kaki penguat instrumentasi AD521 dan driver light right.
Gambar 5. Perancangan sensor elektroda Ag-Agcl.
B. Perancangan penguat instrumentasi
Sinyal yang disadap oleh electroda sangat kecil. Untuk menampilkan sinyal tersadap tersebut dibutuhkan penguatan yang sangat besar. Intensitas gelombang otak pada kulit kepala berkisar 0 sampai 300 uV dan sangat mudah terganggu sinyal noise sehingga diperlukan suatu penguat instrumentasi yang dapat menguatkan sinyal. Untuk sinyal
α dan β yang akan ditampilkan mempunyai sinyal yang besarnya 0 sampai 50uV, untuk itu dibutuhkan penguatan
117 total sebesar 100000 kali supaya sinyal tersebut dapat teraba
dan terdeteksi oleh ADC. Rangkaian penguat instrumentasi yang direncanakan seperti yang terlihat dalam Gambar 6.
Gambar 6. Rangkaian penguat instrumentasi dengan menggunakan AD521[4].
Komponen yang digunakan sebagai sebagai penyangga IC1 adalah tipe AD521 yaitu IC dengan dua op amp dalam
satu kemasan. Dengan menggunakan rangkaian penguat instrumentasi ini beda tegangan dari kedua masukan akan dikuatkan. Besar penguat-penguat instrumentasi yaitu sesuai dengan persamaan berikut:
= G S R R A (1)
DLR (Drive Leg Right) merupakan rangkaian integrator yang berfungsi mengondisikan sinyal pada kulit kepala agar tidak terjadi nois yang diakibatkan oleh selisih tegangan antara kulit kepala dengan sistem tegangan jala-jala. Skripsi ini tidak membahas secara detil mengenai DLR ini. Nilai-nilai komponen yang terdapat pada rangkaian integrasi ini mengacu pada refrensi yang sudah ada, yaitu dengan nilai C= 22nF. Sedangkan untuk OpAmp yang digunakan adalah jenis LM358.
C. Perancangan Penguat non inverting
Pada Perancangan ini , penguat non inverting berfungsi sebagai penguat sinyal tingkat kedua. Ini bertujuan untuk mengurangi error yang akan terjadi jika penguatan dibebankan hanya kepada rangkaian penguat instrumentasi dan filter.
Di dalam Gambar 7, rangkaian penguat non inverting ini digandeng dengan rangkaian kopling AC yang berfungsi untuk menghilangkan offset DC yang merupakan hasil keluaran dari rangkaian penguat instrumentasi.
Gambar 7. Rangkaian OpAmp Non Inverting [4].
Untuk kopling DC, diatur agar frekuensi yang dilewatkan diatas 0,16 Hz sesuai dengan persamaan
1 1 2 1 C R fc= π
Untuk nilai C1 = 1uF, maka didapatkan nilai R1 = 1 MΩ
Untuk rangkaian non inverting diperlukan penguat sebesar 100 kali. Dengan menggunakan persamaan,
3 1 1 R R G= + 99 • 1 kΩ = R3; R3 ≈ 100 kΩ
Untuk mendapatkan gain 100 kali dengan R = 1K2 Ω , didapatkan R3 = 99 KΩ ,karena menyesuaikan komponen
yang ada dipasaran maka digunakan nilai untuk R3= 100 k
Ω
D. Perancangan lowpass filter
Low Pass Filter digunakan untuk membatasi jangkauan frekuensi pada sinyal masukan sehingga sinyal keluaran hanya berada pada frekuensi di bawah frekuensi cut off saja. Dengan demikian sinyal-sinyal frekuensi tinggi yang masih mempengaruhi sinyal masukan akan di redam.Rangkaian low pass filter ditunjukkan seperti dalam Gambar 8.
Gambar 8. Rangkaian Butterworth Low Pass Filter [4].
Rangkaian dalam Gambar 8 adalah terdiri atas sebuah filter Butterworth low pass filter orde dua. .Dalam perencanaan sistem EEG ini filter Butterworth low pass dirancang untuk meredam sinyal dengan frekuensi diatas 50 Hz dan meloloskan sinyal di bawahnya dengan penguat sebesar 100 kali untuk memenuhi total penguatan yang dibutuhkan agar menghasilkan keluaran sekitar 5 V.
+ = 7 8 1 R R Ao = + = 7 8 1 100 R R 8 99=R
Jika R7 = 1K
Ω
, maka didapatkan R8 = 99KΩ
. Komponendengan nilai 99K
Ω
tidak ada di pasaran, sehingga digunakanlah komponen variable resistor dengan nilai resistansi 100KΩ
. Sedangkan untuk frekuensi cut off yang diinginkan, maka didapatkan :4 3 6 5 2 1 C C R R fe π =
Untuk R5 = 10 K
Ω
dan R6 = 15 KΩ
maka:4 3 15 10 2 1 50 C C . K . K π = 12 4 10 6 20 1 220 • = • , C nF
118 9 12 10 4532 10 4 − − • = C C4=0.00000033 F
Sehingga untuk C3 = 220 nF, didapatkan C4 = 33nF.
Dengan demikian komponen-komponen dengan nilai-nilai komponen yang digunakan adalah R5 = 10 KOhm, R6 = 15
KOhm, R7 = 1 KOhm, R8 = VR2 = 100 KOhm, C3 =
220nF,dan C4 = 33nF.
E. Band Pass Filter
Filter band pass dirancang untuk hanya melewatkan sinyal dalam suatu pita frekuensi tertentu dan menolak semua sinyal diluar pita ini. Jika nilai C1 dan C2 ditentukan
sebesar 100uF, Ar (gain maksimum) untuk melengkapi
penguatan sistem (gain pada penguatan sebelumnya sudah mencukupi untuk menghasilkan sinyal masukan ADC sebesar 5 Volt) sebesar 1, maka R1, R2 dan R3 dapat dihitung
dengan cara:
Untuk sinyal Alfa ( 8 – 13 Hz)
ω1=2πf1=6,28.8Hz=50,24rad/s ωh =2πfh =6,28.13Hz=81,12rad/s s / rad , r h r 68 65 2 1 1 = + − = ω ω ω ω ω B , rad/s B h 88 30 1 = − =ω ω 126 2 88 30 68 65 , , , B Q=ωr = =
Maka diperoleh nilai-nilai R sebagai berikut:
Ω 648 668 647 2 2= = , ≈ BC R Ω 324 834 323 2 2 1= = , ≈ A R R r Ω 40 279 40 2 4 2 2 3 = ≈ − = . A Q R R r
Untuk sinyal Beta (
≈
14 – 25 Hz ) s / rad , Hz . , f 62814 8736 2 1 1= π = = ω s / rad Hz . , fh h =2π =62825 =157 ω s / rad , r h r 18 122 2 1 1 = + − = ω ω ω ω ω s / rad , B B h 64 69 1 = − =ω ω 75 1 64 69 18 122 , , , B Q=ωr = =Maka diperoleh nilai-nilai R sebagai berikut: Ω 287 191 287 2 2 = = , ≈ BC R 144 596 143 2 2 1= = , ≈ A R R r
Ω
Ω
28 018 28 2 4 2 2 3 = ≈ − = , A Q R R rDengan pertimbangan komponen yang ada dipasar maka menggunakan pada penggunaan resistor untuk gelombang Alpha antara lain R1 = 330
Ω
, R2 = 680Ω
, R3 = 43Ω
sedangkan untuk gelombang Beta antara lain R1 = 150
Ω
, R2 = 300Ω
, R3 = 30Ω
.Rangkaian filter band pass Alfa ditunjukkan dalam Gambar 9, dan rangkaian filter band pass beta ditunjukkan dalam Gambar 10.
Gambar 9. Rangkaian bandpass filter alfa [4].
Gambar 10. Rangkaian bandpass filter beta [4].
F. Perancangan Mikrokontroler
Rangkaian ini digunakan sebagai penerima inputan sinyal analog Alfa dan Beta dan mengirim data Digital Alfa dan Beta ke komputer melalui konektor DB9.
119 Rangkaian ini menggunakan Mikrokontroler AVR tipe
ATMEGA8535. Mikrokontroler ini dipilih karena mempunyai ADC (Analog to Digital Converter) internal, sehingga rangkaian lebih praktis dibanding menggunakan mikrokontroler produksi ATMEL sebelum versi AVR yang membutuhkan ADC eksternal sebagai pengkonversi data analog ke digital.
Untuk mengkonversi level tegangan TTL ke CMOS digunakan IC MAX232 dengan nilai C = 47uF/16V. Fungsi dari mikrokontroler ATMEGA8535 adalah sebagai pengkonversi sinyal analog (Alfa dan Beta) ke data digital dan mengolah datanya yang selanjutnya dikirim melalui pin komunikasi serial (TXD dan RXD). Sedangkan fungsi dari IC MAX232 adalah sebagai pengkonversi level tegangan TTL dari mikrokontroler ke level tegangan CMOS computer atau sebaliknya. Tujuan dari dibuatnya alat ini adalah agar sinyal analog (Alfa dan Beta) dapat dikonversi ke data digital dan dapat ditampilkan ke komputer menggunakan software DELPHI. Rangkaian ATMega8535 diperlihatkan Gambar 11.
IV. PENGUJIAN RANGKAIAN
A. Pengujian Rangkaian Penguat Instrumentasi
Tujuan pengujian penguat instrumentasi adalah untuk mengetahui besar penguatan saat dioperasikan. Alat Bantu yang digunakan yaitu function generator yang berfungsi untuk memberikan tegangan masukan sinusoida dan osiloskop untuk mengamati sinyal keluaran rangkaian yang diuji. Langkah pengujian yang dilakukan adalah:
Alat dirangkai seperti dalam Gambar 12.
Memberikan tegangan masukan sinyal sinusoida 30 Hz dari function generator.
Mengamati sinyal keluaran dan mencatat hasilnya.
Gambar 12. Pengujian Rangkaian AD521.
Pada pengujian telah didapatkan data-data seperti terdapat dalam Tabel I.
TABELI
PENGUJIAN RANGKAIAN PENGUAT INSTRUMENTASI AD521
Err % = 6
∑
%Err 5 5 53, Error % = = 10,7%Dari hasil analisa pengujian pada penguatan instrumentasi AD521 diatas terdapat penyimpangan dari nilai yang diharapkan sebesar 10,7 % untuk penguat instrumentasi.
A. Pengujian Non Inverting
Tujuan pengujian penguat Non Inverting adalah untuk mengetahui besar penguatan yang dikeluarkan oleh rangkaian non inverting saat dioperasikan. Alat Bantu yang digunakan yaitu function generator yang berfungsi untuk memberikan tegangan masukan sinusoida dan osiloskop untuk mengamati sinyal keluaran rangkaian yang diuji. Langkah pengujian yang dilakukan adalah:
Alat dirangkai seperti dalam Gambar 13.
Memberikan tegangan masukan sinyal sinusoida 30 Hz dari function generator.
Mengamati sinyal keluaran dan mencatat hasilnya.
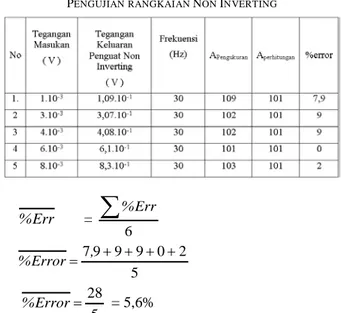
Gambar 13. Sistem Pengujian rangkaian Non Inverting. TABELII
PENGUJIAN RANGKAIAN NON INVERTING
Err % = 6
∑
%Err 5 2 0 9 9 9 7 + + + + = , Error % 5 28 = Error % = 5,6%Dari hasil pengujian dan analisa diatas pada penguatan non inverting di dapatkan %error sebesar 5.6 % untuk penguatan non inverting.
120 B. Pengujian Lowpass Filter
Tujuan pengujian Low Pass filter adalah untuk mengetahui besar penguatan dan letak titik frekuensi cut-off. Letak frekuensi cut-off ditentukan berdasarkan pada saat penurunan penguatan filter sebesar –3 dB. Alat Bantu yang digunakan adalah function generator dan langkah pengujian yang dilakukan adalah sebagai berikut:
Alat dirangkai seperti dalam Gambar 14
Memberikan masukan sinyal sinusoida dari function generator dengan amplitudo tetap dan frekuensi diubah-ubah.
Mengamati dan mencatat hasil sinyal keluaran.
Gambar 14. Pengujian Rangkaian Low Pass Filter.
Pada pengujian telah didapatkan data-data seperti terdapat dalam Tabel III yaitu sebagai berikut.
TABELIII
TANGGAPAN FREKUENSI LOW PASS FILTER
Dari Tabel III didapatkan besar penguatan maksimal pada daerah kerja filter yaitu 95 kali. Grafik tanggapan frekuensi Low Pass Filter ditunjukkan seperti dalam Gambar 15.
Gambar 15. Tanggapan Frekuensi LowPass Filter.
Dalam grafik tersebut diperoleh titik frekuensi cut-off yaitu frekuensi 54 Hz. Dengan demikian telah terjadi pergeseran nilai sebesar 4 Hz dari frekuensi cut-off yang direncanakan yaitu 50 Hz, sehingga untuk rangkaian low pass filter ini mempunyai % error sekitar 8%. Hal ini
disebabkan karena adanya nilai toleransi pada beberapa komponen yang digunakan.
C. Pengujian Bandpass filter
Pengujian ini bertujuan untuk mengetahui respon frekuensi filter dan mengetahui lebar pita (bandwidth) filter. Peralatan yang dibutuhkan dalam pengujian ini berupa Function Generator, Osiloskop, rangkaian filter dengan blok diagram seperti diperlihatkan Gambar 16.
Gambar 16. Pengujian Sub sitem Band Pass Filter.
D. Hasil pengujian dan analisa
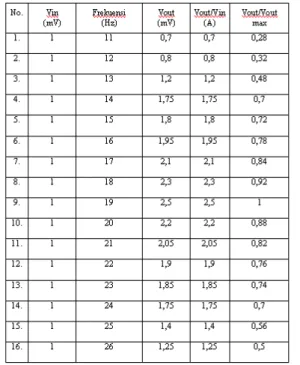
Hasil pengujian dan pengukuran terhadap frekuensi band pass flter diperlihatkan Tabel IV.
TABELIV
TANGGAPAN FREKUENSI BAND PASS FILTER UNTUK GELOMBANG α(8 – 13 H)
Dari Tabel IV didapatkan grafik tanggapan frekuensi Band Pass Filter yang ditunjukkan seperti dalam Gambar 17.
Gambar 17. Grafik Tanggapan Frekuensi Band Pass Filter untuk gelombang α
121 Tegangan keluaran maksimal untuk Band Pass Filter
gelombang α sebesar 2,45 mV dari inputan 1 mV pada frekuensi 10 dan 11 Hz.
Untuk Filter
α
didapatkan:FL1 = 7,07 Hz (error = 11,6%)
FH1 = 14,14 Hz (error = 8%)
%Err Bw1 = 17 %
TABELV
TANGGAPAN FREKUENSI BAND PASS FILTER UNTUK GELOMBANG
B(14–25H)
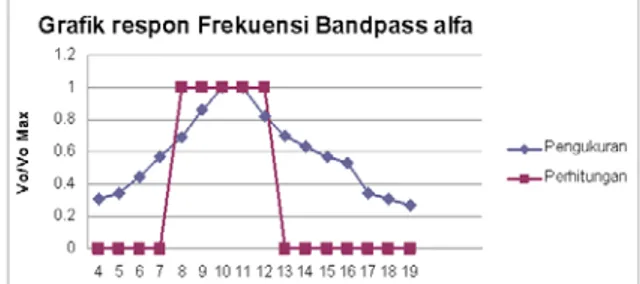
Dari Tabel V didapatkan grafik tanggapan frekuensi bandpass filter beta seperti diperlihatkan Gambar 18.
Gambar 18. Tanggapan frekuensi band pass filter.
Terlihat bahwa tegangan keluaran maksimal untuk Band Pass Filter gelombang β sebesar 2,5 mV dari inputan 1 mV pada frekuensi 19 Hz.
Untuk Filter
β
didapatkan :FL2 = 13,433 Hz (error = 4%)
FL2 = 26,866 Hz (error = 7,4%)
%Err Bw2 = 15 %
Range frekuensi yang didapatkan ternyata masih belum sesuai dengan yang direncanakan. Namun keadaan range frekuensi seperti ini masih bisa digunakan untuk memisahkan sinyal αdan β . Ketidaksesuaian ini terjadi
karena tidak presisinya komponen yang ada dipasaran serta nilai toleransi komponen yang terlalu besar.
V. PENGUJIAN SISTEM
Pengujian seluruh sistem ini bertujuan untuk mengetahui unjuk kerja perangkat keras dan perangkat lunak. Hasil yang akan diamati yaitu dengan melihat grafik sinyal EEG pada CPU dengan rangkaian seperti pada Gambar 19.
Gambar 19. Pengujian Seluruh Sistem EEG.
Dari rangkaian pengujian Gambar 19, diperoleh hasil berupa sinyal alfa dan beta yang tampilannya masing-masing diperlihatkan Gambar 20 dan 21.
Gambar 20. Tampilan sinyal alfa pada software.
Gambar 21. Tampilan sinyal beta pada software.
Dari Hasil tampilan diatas terlihat perbedaan karakteristik sinyal yang ditampilkan antara sinyal alfa dan beta.
VI. KESIMPULAN
Setelah dilakukan proses perancangan dan pembuatan serta pegujian alat maka dapat diambil beberapa kesimpulan antara lain:
1. Dari hasil pengujian rangkaian penguat awal didapat nilai persentase error rata-rata sebsar 10,7 % yang berarti bahwa rangkaian ini dapat bekerja dengan baik walaupun masih terdapat error
2. Untuk rangkaian low-pass filter terdapat persentase error sebesar 8 % ini berarti bahwa rangkaian dapat bekerja dengan baik.
3. Untuk rangkaian penguat non-inverting terdapat persentase error sebesar 5,6%, hal ini terjadi karena adanya selisih nilai besaran pada komponen yang digunakan dengan perancangan karena terbatasnya nilai besaran yang tersedia di pasaran.
122 4. Pada rangkaian Bandpass filter alfa terdapat persentase
error bandwidth sebesar 17 %. Sedangkan untuk Bandpass filter beta mempunyai persentase error sebesar 15%,hal ini dikarenakan besarnya nilai toleransi komponen yang terlalu besar,dan tidak presisinya komponen dipasaran.
5. Pada pembacaan software dapat terlihat karakterikstik sinyal biolistrik otak berdasarkan jenis biolistrik otak.
DAFTAR PUSTAKA
[1] Delorenzo Bimomedical Practical Guide, Delorenzo.Inc.,2007, Italy
[2] Lingga Wardana.2006. “Belajar sendiri mikrokontroller seri AVR, simulasi dan hard ware”, Yogyakarta: Andi
[3] John G.Webster,’ Medical Instrumentation Application And Design,’,John wiley & Son,1998
[4] Coughlin Robert F.,1992 “ Penguat Operasional Dan Rangkaian Terpadu Linear “, Erlangga , Jakarta
[5] www.biopac.com [6] www.datasheet.com
![Gambar 3. Elektroda Kulit [7] .](https://thumb-ap.123doks.com/thumbv2/123dok/4286700.2895151/2.893.494.790.116.433/gambar-elektroda-kulit.webp)
![Gambar 6. Rangkaian penguat instrumentasi dengan menggunakan AD521[4].](https://thumb-ap.123doks.com/thumbv2/123dok/4286700.2895151/3.893.84.421.144.347/gambar-rangkaian-penguat-instrumentasi-menggunakan-ad.webp)
![Gambar 9. Rangkaian bandpass filter alfa [4].](https://thumb-ap.123doks.com/thumbv2/123dok/4286700.2895151/4.893.509.774.299.489/gambar-rangkaian-bandpass-filter-alfa.webp)