TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh:
SUPRIYADI
NIM : 035114025
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
Written by:
SUPRIYADI
Student Number : 035114025
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SAINS AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
Motto
CURA, UT VALEAS!
(Unknown)
Persembahan:
Ku persembahkan karya kecilku ini untuk:
Tuhan Yesus Kristus, selamanya aku milik-Nya... dalam kasih-Nya aku berkarya.
Bapak dan Ibu tercinta, almarhum Andreas Yosef Langi dan Katharina Bedai,
atas cinta yang tak berbatas.
Saudara-Saudariku tercinta, Hendrikus Suyadi, Herkulanus Hanggi, Helena Rasmiati dan
Adrianus Handri.
Kedua keponakanku tersayang, Albertus Yudi Pratama dan Octaviani Cyntia.
Keluarga Besarku tercinta.
frekuensi dengan metode multitone yang merupakan alat ukur dengan tiga sensor pengukuran, yaitu sensor pertama untuk mengukur suhu udara, sensor kedua untuk mengukur tekanan udara dan sensor ketiga untuk mengukur kelembaban udara, dengan sistem komunikasi gelombang radio FM.
Filter Butterworth untuk sistem telemetri dengan metode multitone ini terdiri dari bagian-bagian filter dan rangkaian pembanding. Bagian filter terdiri
low pass filter (LPF) 20 kHz, LPF 7 kHz, band pass filter (BPF) 8-13 kHz dan
high pass filter (HPF) 14 kHz. LPF 20 kHz digunakan untuk memisahkan sinyal masukan dari frekuensi transmisi, dan keluarannya digunakan sebagai masukan untuk ketiga filter lainnya. LPF 7 kHz untuk melewatkan frekuensi yang mewakili data sensor pertama, BPF 8-13 kHz untuk melewatkan frekuensi yang mewakili data sensor kedua dan HPF 14 kHz untuk melewatkan frekuensi yang mewakili data sensor ketiga. Keluaran dari ketiga filter ini selanjutnya dilewatkan pada rangkaian pembanding untuk mengubah sinyal keluaran menjadi gelombang kotak. Gelombang kotak ini merupakan keluaran akhir dari sistem sehingga pada sistem selanjutnya dapat diidentifikasi sebagai data biner dengan logika low dan
high yang ditunjukkan oleh level tegangannya.
Dari hasil percobaan secara terpisah, masing-masing dari filter dan pembanding telah bekerja mendekati perancangan. Pada LPF 20 kHz didapatkan frekuensi cut-off sebesar 18503,5 Hz, LPF 7 kHz didapatkan frekuensi cut-off
sebesar 6852 Hz, BPF 8-13 kHz didapatkan frekuensi cut-off bawah sebesar 8408 Hz serta frekuensi cut-off atas sebesar 13176Hz dan HPF 14 kHz didapatkan frekuensi cut-off sebesar 13586 Hz. Sedangkan pembanding telah dapat menghasilkan keluaran berupa gelombang kotak tanpa mengubah frekuensinya. Tetapi saat diterapkan dalam sistem dengan masukan sinyal terjumlah, tidak didapatkan keluaran akhir seperti yang diinginkan. Hal ini disebabkan oleh penggunaan filter dengan orde rendah, sehingga sinyal keluaran filter masih terinterferensi oleh frekuensi lain diluar batas frekuensi cut-off filter.
first sensor measured atmospheric temperature, the second sensor measured atmospheric pressure and the third sensor measured atmospheric humidity in communication radio system.
Butterworth filter circuit consists of filter circuit and comparator circuit. Filter circuit consists of low pass filter (LPF) 20 kHz, LPF 7 kHz, band pass filter (BPF) 8-13 kHz and high pass filter (HPF) 14 kHz. LPF 20 kHz was used to separate input signal from receiving signal, and then the filter output was used to input signal for other filter. LPF 7 kHz used to pass the frequency which is represent first sensor data, BPF 8-13 kHz used to pass the frequency which is represent second sensor data and HPF 14 kHz used to pass the frequency which is represent third sensor data. And then, the output from each filter feed in comparator circuit to shape the output signal to be a square waves. This square waves is a final output from system and then, in the next system can be identification as a biner data with low and high logic as shown by voltage level.
From the experiments, each filter and comparator was works close to the design. At LPF 20 kHz, founded 18503.5 Hz cut-off frequency, at LPF 7 kHz founded 6852 Hz. At BPF founded 8408 Hz as low cut-off frequency and 13176 Hz as high cut-off frequency. At HPF 14 kHz founded 13586 Hz as cut-off frequency. The comparator was produce output signal of square waves without change the frequency. But, when it apllied in the system with adder result input signal, the final output did not worked well. This problem founded because it was used of low orde filter, and then output signal was still interfered by the other frequency outside of the cut-off filter frequency.
rahmat dan penyertaan-Nya sehingga penulis dapat menyelesaikan tugas akhir dengan judul “Filter Butterworth Untuk Sistem Telemetri Dengan Metode Multitone”.
Tugas akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik Elektro di Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta, sekaligus sebagai upaya untuk memperdalam dan memperkaya wawasan berpikir serta menambah wacana di bidang elektronika khususnya dan sains teknologi pada umumnya.
Pembuatan tugas akhir ini tidak terlepas dari bantuan dan bimbingan berbagai pihak, untuk itu penulis ingin mengucapkan terima kasih kepada :
1. B. Wuri Harini S.T., M.T., Ketua Jurusan Teknik Elektro yang telah memberikan perhatiannya selama kuliah di Universitas Sanata Dharma Yogyakarta.
2. A. Bayu Primawan, S.T., M.Eng., selaku dosen pembimbing I yang telah memberikan bimbingan, masukan, waktu, dan perhatiannya selama penyusunan tugas akhir ini.
3. Martanto, S.T., M.T., selaku dosen pembimbing II yang telah memberikan bimbingan, masukan, waktu, dan perhatiannya selama penyusunan tugas akhir ini.
6. Segenap karyawan sekretariat Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
7. Seluruh Staf Perpustakaan Universitas Sanata Dharma Yogyakarta yang sudah memberikan layanan dan bantuan selama proses pencarian referensi. 8. Ibu dan segenap keluarga besar tercinta yang selalu memberi doa,
dukungan dan semangat dalam menyelesaikan kuliah dan pengerjaan tugas akhir ini.
9. ”Himpunan Pelajar Mahasiswa Dayak Kapuas Hulu”, terima kasih atas semua bantuan dan kebersamaan yang indah selama ini.
10.Teman-teman TE: I Putu Eka, Andry Prihatin, Liberius Aries, Frederik Erik, Guntur Maulana, Bayu Rani, Tri Dese, Marselinus Roni, Ricky Nelson, SigitPurbayadi, Venantius Andika, Heru Wahyudi, Nendar Wibarasta, Sukur Widodo, Ratno, Yohanes Pemandi Ariadi. Tomo, Petrus Veni, Robert, Yulius, Nestor, Tono, Stefan, Budin, Andro, Ivan, Diro, Doni, Rikardus, terimakasih atas dukungan, bantuan dan kekompakannya. 11.Semua pihak yang telah membantu dan tidak dapat disebutkan satu persatu
sehingga skripsi ini dapat diselesaikan. 12.sehingga skripsi ini dapat diselesaikan.
Lembar Persetujuan oleh Pembimbing ...iii
Lembar Pengesahan ...iv
Lembar Persetujuan Publikasi...v
Lembar Pernyataan keaslian karya...vi
Halaman Persembahan dan Motto Hidup ...vii
Intisari ...viii
Abstract ...ix
Kata Pengantar ...x
Daftar Isi ...xiii
Daftar Gambar...xvi
Daftar Tabel ...xviii
Daftar Lampiran ...xix
BAB I PENDAHULUAN... 1
1.1 Judul ... 1
1.2 Latar Belakang Masalah... 1
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ...3
1.5 Batasan Masalah ... 3
1.6 Metodologi Penelitian ... 4
1.7 Sistematika Penulisan ... 5
2.1.6 Peng-kaskade-an (Cascading)...23
2.2 Penguat Operasional (Operational Amplifier, Op-Amp) Sebagai Pembangun Dasar...24
2.2.1 Dasar-dasar Penguat Operasional ...24
2.2.2 Penguat Membalik (Inverting Amplifier) ...27
2.2.3 Penguat Tak Membalik (Non Inverting Amplifier) ...28
2.2.4 Pengikut Tegangan (Voltage Follower) ...29
BAB III PERANCANGAN...32
3.2 Rangkaian Pembanding (Comparator) ...46
3.3 Rangkaian Penyangga (Buffer) ...47
BAB IV PENGAMATAN DAN PEMBAHASAN ...49
4.1 Low Pass Filter 20 kHz ...49
4.2 Low Pass Filter 7 kHz ...52
4.3 Band Pass Filter 8-13 kHz ...54
4.4 High Pass Filter 14 kHz ...56
4.5 Pembanding (Comparator) ...58
4.6 Pembahasan Kinerja Filter Dengan Frekuensi Masukan Yang Berbeda .59 4.7 Analisa Kinerja Sistem Dengan Masukan Sinyal Terjumlah...61
Gambar 2.2 Karakteristik ideal filter pelewat tinggi...9
Gambar 2.3 Karakteristik ideal filter pelewat jalur...9
Gambar 2.4 Karakteristik ideal filter penolak jalur ...10
Gambar 2.5 Kurva tanggapan Low Pass Filter...10
Gambar 2.6 Untai dasar Low Pass Filter...11
Gambar 2.7 Low Pass Filter orde ke-2 ...12
Gambar 2.8 Low Pass Filter orde ke-2 ...13
Gambar 2.9 Kurva tanggapan High Pass Filter...16
Gambar 2.10 Untai dasar High Pass Filter...16
Gambar 2.11 High Pass Filter orde ke-2 ...17
Gambar 2.12 High Pass Filter orde ke-2 ...17
Gambar 2.13 Tanggapan amplitudo relatif BPF secara umum ...20
Gambar 2.14 Tanggapan amplitudo BPF orde 2 dengan berbagai nilai Q ....22
Gambar 2.15 Diagram blok kaskade untuk filter orde tinggi...23
Gambar 2.16Simbol Op-Amp (dalam rangkaian)...25
Gambar 2.17 Catu daya bipolar sederhana ...25
Gambar 2.18 Non invertingcomparator dengan bias positif...26
Gambar 2.19 Invertingcomparator dengan bias positif ...27
Gambar 2.20 Rangkaian penguat inverting...28
Gambar 2.21 Rangkaian penguat non inverting...28
Gambar 2.22 Rangkaian pengikut tegangan ...29
Gambar 2.23 Rangkaian penguat inverting tanpa pengikut tegangan...30
Gambar 3.1 Diagram blok sistem telemetri secara umum ...32
Gambar 3.2 Diagram blok bagian penerima ...33
Gambar 3.3 Low Pass Filter 20 kHz...36
Gambar 3.4Low Pass Filter 7 kHz...38
Gambar 3.5Low Pass Filter 13 kHz...41
Gambar 3.10 Rangkaian Penyangga ...48
Gambar 4.1 Grafik Tanggapan Frekuensi LPF 20 kHz ...51
Gambar 4.2Grafik Tanggapan Frekuensi LPF 7 kHz ...53
Gambar 4.3Grafik Tanggapan Frekuensi BPF 8-13 kHz...56
Gambar 4.4Grafik Tanggapan Frekuensi HPF 14 kHz...58
Gambar 4.5(a) Sinyal terjumlah masukan sistem dengan Amplitudo 9 Vpp.62 Gambar 4.5(b) Sinyal terjumlah untuk masukan Sistem setelah pembagi tegangan dengan Amplitudo 3 Vpp...62
Gambar 4.6(a) Sinyal keluaran LPF 20 kHz dengan masukan sinyal terjumlah ...62
Gambar 4.6(b) Sinyal keluaran LPF 20 kHz setelah pembagi tegangan dengan masukan sinyal terjumlah ...63
Gambar 4.7(a) Sinyal keluaran LPF 7 kHz dengan masukan sinyal terjumlah, Amplitudo 4,8 Vpp ...64
Gambar 4.7(b) Keluaran akhir LPF 7 kHz setelah Rangkaian Pembanding dengan masukan sinyal terjumlah ...64
Gambar 4.8(a) Sinyal keluaran BPF 8-13 kHz dengan masukan sinyal terjumlah ...65
Gambar 4.8(b) Keluaran akhir BPF 8-13 kHz setelah Rangkaian Pembanding dengan masukan sinyal terjumlah ...65
Gambar 4.9(a) Sinyal keluaran HPF 14 kHz dengan masukan sinyal terjumlah ...65
Gambar 4.9(b) Keluaran akhir HPF 14 kHz setelah Rangkaian Pembanding dengan masukan sinyal terjumlah ...66
Lampiran 2 Foto Perangkat Keras Hasil Perancangan... L3 Lampiran 3 Tabel Data pengukuran LPF 20 kHz ... L5 Lampiran 4 Tabel Data pengukuran LPF 7 kHz ... L7 Lampiran 5 Tabel Data pengukuran BPF 8-13 kHz... L10 Lampiran 6 Tabel Data pengukuran HPF 14 kHz... L13 Lampiran 7 Tabel Hubungan Antara Data Sensor 1 (Suhu) Dengan
Frekuensi ... L15 Lampiran 8 Tabel Hubungan Antara Data Sensor 2 (Tekanan) Dengan
Frekuensi ... L17 Lampiran 9 Tabel Hubungan Antara Data Sensor 3 (Kelembaban) pada
suhu 250Cdengan Frekuensi... L19 Lampiran 10 Tabel Hubungan Antara Data Sensor 3 (Kelembaban) pada
suhu 350Cdengan Frekuensi... L20 Lampiran 11 Tabel Hubungan Antara Data Sensor 3 (Kelembaban) pada
suhu 450Cdengan Frekuensi... L21 Lampiran 12 Gambar Sinyal AFG (Audio Function Generator) sebagai
masukan Sistem dengan Amplitudo 9 Vpp dan Frekuensi 10008 Hz ... L23 Lampiran 13 Gambar Sinyal AFG (Audio Function Generator) sebagai
masukan LPF 20 kHz dengan Amplitudo 2,6 Vpp dan Frekuensi 10008 Hz ... L23 Lampiran 14 Gambar sinyalkeluaran LPF 20 kHz dengan Amplitudo 7,5
Vpp dan Frekuensi 10008 Hz... L23 Lampiran 15 Gambar sinyal keluaran LPF 20 kHz yang telah dibagi
tegangannya dengan Amplitudo 2,5 Vpp dan Frekuensi 10008 Hz ... L24 Lampiran 16 Gambar sinyal masukan LPF 7 kHz dengan Amplitudo 2,5
0,6 Vpp dan Frekuensi 4288 Hz... L25 Lampiran 19 Gambar sinyal keluaran HPF 14 kHz dengan Frekuensi 4288
Hz ... L25 Lampiran 20 Gambar sinyal masukan BPF 8-13 kHz dengan Amplitudo
2,5 Vpp dan Frekuensi 10558 Hz... L25 Lampiran 21 Gambar sinyal keluaran BPF 8-13 kHz dengan Amplitudo
9,4 Vpp dan Frekuensi 10558 Hz... L26 Lampiran 22 Gambar sinyal keluaran LPF 7 kHz dengan Amplitudo 1 Vpp
dan Frekuensi 10558 Hz ... L26 Lampiran 23 Gambar sinyal keluaran HPF 14 kHz dengan Amplitudo 1,9
Vpp dan Frekuensi 10558 Hz... L26 Lampiran 24 Gambar sinyal masukan HPF 14 kHz dengan Amplitudo 2,5
Vpp dan Frekuensi 17043 Hz... L27 Lampiran 25 Gambar sinyal keluaran HPF 14 kHz.dengan Amplitudo 4
Vpp dan Frekuensi 17043 Hz... L27 Lampiran 26 Gambar sinyal keluaran LPF 7 kHz.dengan Amplitudo 0,14
Vpp dan Frekuensi 17043 Hz... L27 Lampiran 27 Gambar sinyal keluaran BPF 8-13 kHz.dengan Amplitudo
2,4 Vpp dan Frekuensi 17043 Hz... L28 Lampiran 28 Gambar keluaran akhir LPF 7 kHz setelah Rangkaian
Pembanding dengan Amplitudo 4,4 Vpp dan Frekuensi 4288 Hz ... L28 Lampiran 29 Gambar keluaran akhir BPF 8-13 kHz setelah Rangkaian
Pembanding dengan Amplitudo 4,4 Vpp dan Frekuensi 4288 Hz ... L28 Lampiran 30 Gambar keluaran akhir HPF 14 kHz setelah Rangkaian
Lampiran 32 Gambar keluaran akhir LPF 7 kHz setelah Rangkaian Pembanding dengan Amplitudo 4,4 Vpp dan Frekuensi 10558 Hz ... L29 Lampiran 33 Gambar keluaran akhir HPF 14 kHz setelah Rangkaian
Pembanding dengan Amplitudo 4,4 Vpp dan Frekuensi
10558 Hz ... L30 Lampiran 34 Gambar keluaran akhir HPF 14 kHz setelah Rangkaian
Pembanding dengan Amplitudo 4,4 Vpp dan Frekuensi
17043 Hz ... L30 Lampiran 35 Gambar keluaran akhir LPF 7 kHz setelah Rangkaian
Pembanding dengan Frekuensi 17043 Hz... L30 Lampiran 36 Gambar keluaran akhir BPF 8-13 kHz setelah Rangkaian
Pembanding dengan Amplitudo 4,4 Vpp dan Frekuensi 17043 Hz ... L31 Lampiran 37 Sinyal masukan sistem gelombang kotak dengan Amplitudo
9 Vpp dan setelah diperkecil dengan Amplitudo 3 Vpp ... L31 Lampiran 38 Sinyal keluaran LPF 20 kHz pada frekuensi 10500 Hz
dengan Amplitudo 8,4 Vpp dan setelah diperkecil dengan Amplitudo 2,8 Vpp ... L31 Lampiran 39 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 2000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 8 Vpp ... L32 Lampiran 40 Sinyal keluaran komparator LPF 7 kHz pada frekuensi 2000
Hz ... L32 Lampiran 41 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Lampiran 43 Keluaran komparator BPF 8-13 kHz dan keluaran komparator HPF 14 kHz pada frekuensi 2000 Hz ... L33 Lampiran 44 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 4000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 8 Vpp... L33 Lampiran 45 Sinyal keluaran komparator LPF 7 kHz pada frekuensi 4000
Hz ... L34 Lampiran 46 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 4000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 3,6 Vpp ... L34 Lampiran 47 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 4000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 1 Vpp ... L34 Lampiran 48 Keluaran komparator BPF 8-13 kHz dan keluaran
komparator HPF 14 kHz pada frekuensi 4000 Hz ... L35 Lampiran 49 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 7000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 5,2 Vpp... L35 Lampiran 50 Sinyal keluaran komparator LPF 7 kHz pada frekuensi 7000
Hz ... L35 Lampiran 51 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 7000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 4,6 Vpp ... L36 Lampiran 52 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 7000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 0,8 Vpp ... L36 Lampiran 53 Keluaran komparator BPF 8-13 kHz dan keluaran
Lampiran 55 Sinyal keluaran komparator LPF 7 kHz pada frekuensi 7500 Hz ... L37 Lampiran 56 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 7500 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 6 Vpp ... L37 Lampiran 57 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 7500 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 0,8 Vpp ... L38 Lampiran 58 Keluaran komparator BPF 8-13 kHz dan keluaran
komparator HPF 14 kHz pada frekuensi 7500 Hz ... L38 Lampiran 59 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 8000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 7,4 Vpp ... L38 Lampiran 60 Sinyal keluaran komparator BPF 8-13 kHz pada frekuensi
8000 Hz ... L39 Lampiran 61 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 8000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 3,6 Vpp... L39 Lampiran 62 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 8000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 0,8 Vpp ... L39 Lampiran 63 Keluaran komparator LPF 7 kHz dan keluaran komparator
HPF 14 kHz pada frekuensi 8000 Hz... L40 Lampiran 64 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 10500 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 1,3 Vpp... L41 Lampiran 67 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 10500 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 1,4 Vpp ... L41 Lampiran 68 Keluaran komparator LPF 7 kHz dan keluaran komparator
HPF 14 kHz pada frekuensi 10500 Hz... L41 Lampiran 69 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 13000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 8,6 Vpp.... L42 Lampiran 70 Sinyal keluaran komparator BPF 8-13 kHz pada frekuensi
13000 Hz ... L42 Lampiran 71 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 13000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 0,6 Vpp... L42 Lampiran 72 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 13000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 2,2 Vpp ... L43 Lampiran 73 Keluaran komparator LPF 7 kHz dan keluaran komparator
HPF 14 kHz pada frekuensi 13000 Hz... L43 Lampiran 74 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 13500 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 7,6 Vpp.... L43 Lampiran 75 Sinyal keluaran komparator BPF 8-13 kHz pada frekuensi
13500 Hz ... L44 Lampiran 76 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Lampiran 78 Keluaran komparator LPF 7 kHz dan keluaran komparator HPF 14 kHz pada frekuensi 13500 Hz... L45 Lampiran 79 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 14000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 4,4 Vpp ... L45 Lampiran 80 Sinyal keluaran komparator HPF 14 kHz pada frekuensi
14000 Hz ... L45 Lampiran 81 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 14000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 0,4 Vpp... L46 Lampiran 82 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,8
Vpp pada frekuensi 14000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 6,8 Vpp.... L46 Lampiran 83 Keluaran komparator LPF 7 kHz dan keluaran komparator
BPF 8-13 kHz pada frekuensi 14000 Hz... L46 Lampiran 84 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,5
Vpp pada frekuensi 17000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 5 Vpp ... L47 Lampiran 85 Sinyal keluaran komparator HPF 14 kHz pada frekuensi
17000 Hz ... L47 Lampiran 86 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,5
Vpp pada frekuensi 17000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 0,2 Vpp... L47 Lampiran 87 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2,5
Vpp pada frekuensi 17000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 3 Vpp... L48 Lampiran 88 Keluaran komparator LPF 7 kHz dan keluaran komparator
Lampiran 90 Sinyal keluaran komparator HPF 14 kHz pada frekuensi 20000 Hz ... L49 Lampiran 91 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2 Vpp
pada frekuensi 20000 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz dengan Amplitudo 0,1 Vpp... L49 Lampiran 92 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 2 Vpp
pada frekuensi 20000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 1,4 Vpp ... L49 Lampiran 93 Keluaran komparator LPF 7 kHz dan keluaran komparator
BPF 8-13 kHz pada frekuensi 20000 Hz... L50 Lampiran 94 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 1,8
Vpp pada frekuensi 20500 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 3,9 Vpp ... L50 Lampiran 95 Sinyal keluaran komparator HPF 14 kHz pada frekuensi
20500 Hz ... L50 Lampiran 96 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 1,8
Vpp pada frekuensi 20500 Hz sebagai masukan LPF 7 kHz dan keluaran LPF 7 kHz... L51 Lampiran 97 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 1,8
Vpp pada frekuensi 20500 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 1,2 Vpp.... L51 Lampiran 98 Keluaran komparator LPF 7 kHz dan keluaran komparator
BPF 8-13 kHz pada frekuensi 20500 Hz... L51 Lampiran 99 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 1,8
Vpp pada frekuensi 21000 Hz sebagai masukan HPF 14 kHz dan keluaran HPF 14 kHz dengan Amplitudo 3,7 Vpp ... L52 Lampiran 100 Sinyal keluaran komparator HPF 14 kHz pada frekuensi
Lampiran 102 Sinyal keluaran LPF 20 kHz yang diperkecil menjadi 1,8 Vpp pada frekuensi 21000 Hz sebagai masukan BPF 8-13 kHz dan keluaran BPF 8-13 kHz dengan Amplitudo 1 Vpp.... L53 Lampiran 103 Keluaran komparator LPF 7 kHz dan keluaran komparator
1.1 Judul
Filter Butterworth Untuk Sistem Telemetri Dengan Metode Multitone.
1.2 Latar Belakang Masalah.
Suatu informasi baik berupa data pengukuran atau hasil pengamatan dikirim dan diterima, kemudian diproses sangat membutuhkan sarana transmisi data yang cepat, akurat dan bisa dipindah – pindah. Sehingga untuk mengirim data dari tempat yang sulit dijangkau dapat dengan mudah diatasi. Pengiriman data dapat menggunakan berbagai media, yang salah satunya adalah dengan gelombang radio. Gelombang radio digunakan sebagai media transmisi karena bersifat fleksibel dan mempunyai rentang frekuensi yang cukup lebar. Selain itu juga mudah dipindahkan karena tidak terkait dengan jaringan kabel.
dan tapis pelewat bidang (BPF) [2]. Filter-filter ini digunakan untuk memberikan batasan-batasan frekuensi untuk setiap data sensor dan juga sebagai pembatas diantara setiap frekuensi data sensor sehingga tidak saling mengganggu (interferensi).
Berdasar dari latar belakang tersebut, maka penulis mencoba menerapkan aplikasi suatu sistem penapis (filtering) untuk memisahkan/membagi satu sinyal masukan menjadi tiga sinyal keluaran yang keluaran akhinya berupa suatu gelombang kotak sehingga pada akhirnya dapat diidentifikasi sebagai data biner (dengan logika low dan high). Dalam sistem akuisisi datanya, keluaran ini nantinya merupakan data yang akan menunjukan level atau keadaan sesungguhnya dari parameter yang diukur.
1.3 Tujuan Penelitian
1.4 Manfaat Penelitian
Adapun manfaat dari pembuatan alat ini adalah :
1. Sebagai salah satu bagian dari keseluruhan sistem telemetri termodulasi frekuensi dengan metode multitone.
2. Sistem pengukuran yang dilakukan menjadi lebih praktis.
3. Sebagai dasar pengembangan untuk aplikasi lainnya yang lebih bervariasi.
1.5 Batasan Masalah
Agar permasalahan yang ada tidak berkembang menjadi luas, maka perlu adanya batasan terhadap permasalahan yang akan dibuat yaitu:
1. Sinyal masukan berupa gelombang kotak.
2. Rentang amplitudo sinyal masukan sistem adalah sebesar 3 - 5 Volt.
3. Hasil atau keluaran akhir dari sistem berupa gelombang kotak. 4. Rentang frekuensi untuk filter Low Pass Filter (LPF) penerima
sinyal termodulasi frekuensi adalah 2 kHz – 20 kHz.
5. Rentang frekuensi untuk filter Low Pass Filter (LPF) penerima sinyal dari sensor 1 adalah 2 kHz – 7 kHz.
6. Rentang frekuensi untuk filter Band Pass Filter (BPF) penerima sinyal dari sensor 2 adalah 8 kHz – 13 kHz.
1.6 Metode Penelitian
Dalam penyusunan Tugas Akhir ini dilakukan beberapa metodologi penelitian. Adapun metodologi penelitian yang dilakukan terdiri dari :
1. Studi pustaka, yaitu dengan mengumpulkan dan mempelajari berbagai informasi, baik dari buku, makalah maupun internet
mengenai hal-hal yang berkaitan dengan sistem telemetri secara umum dan Filter Butterworth secara khususnya sehingga informasi yang diperoleh dapat digunakan sebagai referensi pendukung dalam penyusunan laporan.
2. Merealisasikan pengetahuan yang diperoleh dalam bentuk perancangan hardware.
3. Melakukan pengujian terhadap hasil perancangan agar dapat diketahui hasil secara realistis.
4. Menganalisis hasil pengujian dan membandingkan dengan teori yang ada.
1.7 Sistematika Penulisan
Sistematika penulisan Tugas Akhir ini terbagi menjadi 5 bab yang
disusun sebagai berikut : BAB I. PENDAHULUAN
Bab ini berisi tentang latar belakang masalah, rumusan masalah, batasan masalah, tujuan dan manfaat penelitian, metodologi penelitian serta sistematika penulisan.
BAB II. DASAR TEORI
Bab ini berisi penjelasan-penjelasan umum serta persamaan matematis yang berkaitan dengan sistem telemetri.
BAB III. RANCANGAN PENELITIAN
Bab ini berisi tentang rancangan sistem telemetri, yang meliputi diagram blok, penjelasan cara kerja secara singkat dan pemilihan komponen.
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN
Bab ini berisi hasil pengamatan dan pembahasan dari pengujian yang telah dilakukan.
BAB V. PENUTUP
BAB II
DASAR TEORI
2.1.
Filter
2.1.1. Definisi Filter
Filter atau tapis didefinisikan sebagai sebuah alat atau rangkaian atau substansi yang meneruskan atau meloloskan arus listrik pada frekuensi-frekuensi atau jangkauan frekuensi tertentu serta menahan (menghalangi) frekuensi-frekuensi lainnya. [3]
2.1.2. Klasifikasi Filter
Berdasarkankomponen pendukung, filter dapat diklasifikasikan menjadi 2 macam, yaitu : filter pasif dan filter aktif.
1. Filter Pasif
Filter pasif merupakan suatu rangkaian filter yang hanya terdiri dari inti
ukuran fisik induktor yang semakin besar untuk induktansi yang besar dan biaya
untuk pengadaan induktor relatif besar.
2. Filter aktif
Filter aktif merupakan suatu rangkaian filter yang terdiri dari kombinasi
resistor, kapasitor dan satu atau lebih komponen aktif, biasanya penguat
operasional dengan feedback. Kelebihan yang dimiliki yaitu : karena masukan
penguat operasional mampu menyediakan penguatan atau gain maka sinyal
masukan tidak akan segera mengalami pelemahan (atenuasi) selama rangkaian
meneruskan sinyal-sinyal dengan frekuensi yang dikehendaki, biaya pembuatan
filter murah sebab tidak menggunakan komponen induktor yang harganya
relatif mahal dan tidak selalu tersedia di pasaran, mudah disetel (tune) untuk
jangkauan frekuensi yang lebar tanpa mempengaruhi tanggapan rangkaian yang
telah ditentukan (sesuai dengan yang diinginkan), serta memiliki impedansi
masukan yang tinggi dan keluaran yang rendah sebagai akibat dari penggunaan
penguat operasional yang juga hampir menjamin tidak adanya interaksi antara
filter dengan sumber atau beban sinyal. Sedangkan kekurangannya, yaitu :
membutuhkan catu daya tersendiri, kurang handal dibanding komponen pasif,
perlu feedback sehingga ada kemungkinan tidak stabil dan batasan praktis
Jika berdasarkan jangkauan frekuensi yang dilewatkan (pass band) dan
jangkauan frekuensi yang ditolak(stop band), filter dapat diklasifikasikan menjadi
4 macam, yaitu : Tapis Pelewat Rendah (Low Pass Filter, LPF), Tapis Pelewat
Tinggi (High Pass Filter, HPF), Tapis Pelewat Jalur (Band Pass Filter, BPF) dan
Tapis Penolak Jalur (Band Rejected Filter, BRF). [4,5]
1. Filter Pelewat Rendah
Filter pelewat rendah memilih frekuensi-frekuensi rendah dan menolak
frekuensi-frekuensi tinggi. Karakteristik ideal filter pelewat rendah ditunjukkan
oleh gambar 2.1.
Tanggapan Amplitudo
f fc
1
Gambar 2.1 Karakteristik ideal filter pelewat rendah
2. Filter Pelewat Tinggi
Filter pelewat tinggi menolak frekuensi-frekuensi rendah dan melewatkan
frekuensi-frekuensi tinggi. Karakteristik ideal filter pelewat tinggi ditunjukkan
Tanggapan amplitudo
f fc
1
Gambar 2.2 Karakteristik ideal filter pelewat tinggi
f fo
1
3. Filter Pelewat Jalur
Filter pelewat jalur melewatkan frekuensi-frekuensi dalam pita tertentu,
sedangkan frekuensi-frekuensi diatas pita dan dibawah pita semuanya ditolak.
Karakteristik ideal filter pelewat jalur ditunjukkan oleh gambar 2.3.
Tanggapan amplitudo
Gambar 2.3 Karakteristik ideal filter pelewat jalur
4. Filter Penolak Jalur
Filter penolak jalur menolak frekuensi-frekuensi dalam pita tertentu dan
melewatkan frekuensi-frekuensi diatas dan dibawah pita frekuensi tersebut.
Tanggapan Amplitudo
f fc
1 1
Gambar 2.4 Karakteristik ideal filter penolak jalur
2.1.3. Low Pass Filter (LPF)
Kurva tanggapan frekuensi untuk tapis pelewat bawah atau Low Pass
Filter dapat diperlihatkan dalam gambar 2.5. Dalam gambar 2.5 ini dapat dilihat
bahwa orde yang lebih besar menghasilkan tingkat kecuraman yang lebih curam
dibandingkan dengan orde yang lebih kecil.
Gambar 2.5 Kurva tanggapan Low Pass Filter
Pada filter ini dalam praktek fc diambil pada titik tengah separuh daya sebesar
⎟
Peluruhan filter Op-Amp dapat dirancang agar memiliki karakteristik
yang berbeda. Kemiringan -20 dB/dekade berarti bahwa bila frekuensi meningkat
10 kali dari fc, tegangan akan berkurang sebesar 20 dB. Semakin besar rugi – rugi
dB/dekade berarti semakin terjal kemiringannya, ini mencerminkan batas
penyumbatan yang lebih tajam. Rangkaian sederhana untuk filter LPF diperlihatkan
dalam gambar 2.6.
Gambar 2.6 Untai dasar Low Pass Filter
Konfigurasi rangkaian gambar di atas adalah pengikut tegangan . Resistor
frekuensi Vin di bawah fc, XC kapasitor besar, sehingga sebagian besar Vin jatuh
ke kapasitor C, sedangkan bila diberi Vin yang lebih besar, maka Vout yang
dihasilkan juga besar. Penguatan akan maksimum pada frekuensi–frekuensi rendah,
sehingga sebagian besar Vin jatuh ke resistor R, akibatnya kapasitor C akan
memintas Vin ke ground, dengan Vin yang kecil maka Vout yang dihasilkannya
juga kecil. Penguatan akan di bawah harga maksimum pada frekuensi–frekuensi
yang lebih tinggi.
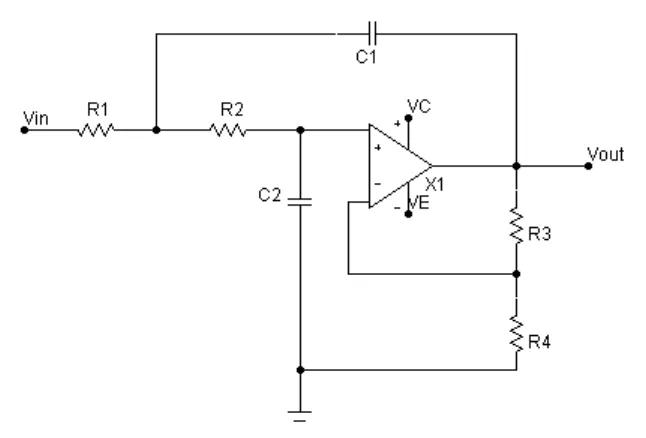
2.1.3.1. Low Pass Filtertipe Butterworth Orde ke-2
Low Pass Filter orde ke-2 dengan komponen sama ditunjukkan
seperti pada gambar 2.7.
Gambar 2.7 dapat juga digambarkan seperti dalam gambar 2.8 berikut ini:
Gambar 2.8Low Pass Filter orde ke-2
Dari gambar 2.8 dapat diperoleh besarnya magnitude tanggapan
frekuensi:
Untuk fungsi kuadrat LPF:
α = faktor redaman
Sehingga memberikan fc
2
Untuk mempermudah perhitungan dalam praktek, dan dengan prinsip
komponen sama, nilai R1 = R2 dan C1 = C2, sehingga rumusannya menjadi:
Sehingga tanggapan Butterworth untuk Low Pass Filter orde ke-2 dari
persamaan (2.3) dapat disederhanakan menjadi:
2
Dengan membandingkan persamaan (2.7) dan (2.2), maka diperoleh
hubungan antara Q, α, dan K:
707
Untuk penguat non-inverting berlaku:
A
Dari gambar 2.5 tanggapan frekuensi, pada saat frekuensi cut-off
penguatan atau gain turun -3 dB dari penguatan passband. Low Pass Filter
mempunyai nilai kecuraman -40 dB/dekade, yaitu untuk setiap 1 dekade
frekuensi, penguatan akan turun 40 dB dari penguatan pada frekuensi cut-off,
demikian juga untuk orde yang lebih tinggi penguatannya akan turun sebesar
nilai kecuramannya.
2.1.4. High Pass Filter
High pass filter atau tapis pelolos atas mempunyai fungsi yang
berkebalikan dengan LPF. Tapis ini akan meredam semua frekuensi dibawah
Gambar 2.9 Kurva tanggapan High Pass Filter
Pada filter ini dalam praktek fc diambil pada titik tengah separuh daya sebesar
0,707 tegangan maksimum. Rangkaian sederhana untuk filter HPF diperlihatkan
dalam gambar 2.10.
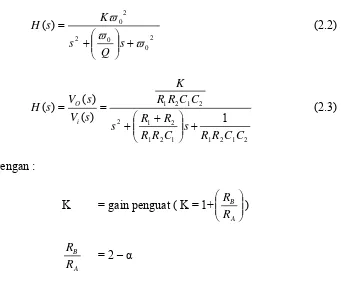
2.1.4.1. High Pass Filter tipe Butterworth Orde ke-2
HPF orde ke-2 dengan komponen sama dapat ditunjukkan seperti
gambar 2.10.
Gambar 2.11High Pass Filter orde ke-2
Gambar 2.11 dapat juga digambarkan seperti dalam gambar 2.12 berikut ini:
Dari gambar 2.12, dapat diperoleh besarnya magnitude tanggapan
frekuensi:
Untuk fungsi kuadrat HPF:
2
Maka diperoleh persamaan:
2.1.5. Band Pass Filter
Seperti telah dijelaskan sebelumnya, Tapis Pelewat Jalur (Band Pass
Filter, BPF) melewatkan frekuensi-frekuensi dalam pita tertentu, sedangkan
frekuensi-frekuensi diatas pita dan dibawah pita semuanya ditolak. BPF yang
paling umum digunakan adalah BPF orde ke-2. Adapun fungsi alih (transfer
function) untuk BPF orde ke-2 dalam keadaan tunak (steady state) ditunjukkan oleh
persamaan berikut :
⎟⎟
M = merupakan penguatan maksimum dalam bidang frekuensi
f0 = frekuensi pusat geometris (geometric center frequency).
Q = faktor kualitas.
Untuk tanggapan amplitudo M(ω), sesuai dengan persamaan (2.19) dapat
ditulis sebagai :
Tanggapan amplitudo relatif (dalam decibel), MdB(ω) dapat diperoleh
dengan membagi persamaan (2.20) dengan M0, sehingga diperoleh
:
Jika digambarkan dalam bentuk grafik, tanggapan amplitudo relatif BPF
secara umum dengan skala linear adalah seperti ditunjukkan oleh gambar 2.13 :
Tanggapan
Berdasarkan gambar 2.13, ketajaman pada sisi frekuensi tinggi (f2) lebih
landai dari pada frekuensi rendah (f1). Jika f1 dan f2 menyatakan frekuensi pada sisi
bawah dan atas yang mempunyai tanggapan 1/ 2 kali tanggapan maksimum
(-3,01 dB), maka bandwidth B adalah :
B = f2 – f1 (2.23)
Frekuensi f1 dan f2 mempunyai simetri geometris di sekitar frekuensi
pusat fo. Sifat ini akan memenuhi persamaan berikut :
2 1.f f
fo = (2.24)
Parameter Qberhubungan dengan frekuensi pusat dan bandwidth sebagai :
B f
Q= 0 (2.25)
Jika Q meningkat, maka filter semakin selektif, artinya bandwidth yang
dibatasi oleh atenuasi 3 dB semakin sempit untuk frekuensi pusat tertentu. Untuk
nilai Q yang lebih tinggi, frekuensi f1 dan f2 akan mempunyai jarak yang semakin
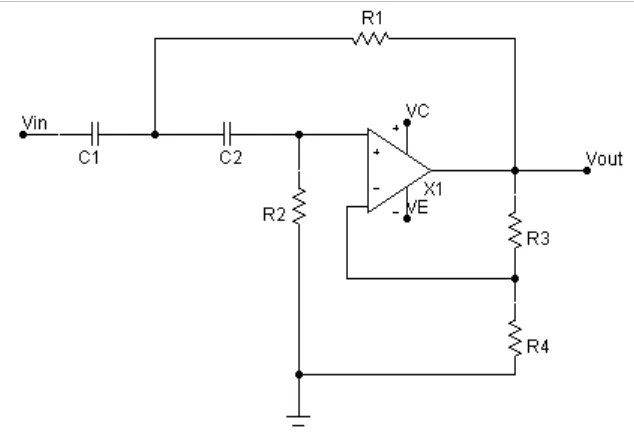
sama pada kedua sisi fo, dan semakin simetris secara aritmatis. Untuk kurva
tanggapan amplitudo BPF orde ke-2 dengan berbagai nilai Q, tampak pada gambar
Gambar 2.14 Tanggapan amplitudo BPF orde 2 dengan berbagai nilai Q
Skala horisontal adalah frekuensi ternormalisasi f/fo (dari 0,1fo sampai 10fo) dalam
bentuk logaritmis. Kurva tanggapan adalah simetris pada skala logaritmis ini. Jika
pada skala linear, maka akan terlihat seperti pada gambar 2.13. Pada nilai Q yang
rendah, penurunan kurva sangat lambat. Penurunan akan semakin cepat untuk nilai Q
yang lebih tinggi. Frekuensi pusat geometris merupakan parameter yang sangat
2.1.6. Peng-kaskade-an (Cascading)
Penapis aktif dengan orde lebih dari dua dapat dibuat dengan cara
menghubungkan secara (cascade) penapis orde pertama dan kedua, jika ada penapis
orde kedua yang dikaskadekan maka bagian bagian penapis orde kedua tersebut
tidak sama, hal ini dapat dilihat pada gambar 2.15.
Orde 1 Orde 2 Orde 3
Orde 2 Orde 2 Orde 4
Orde 1 Orde 2 Orde 2 Orde 5
Orde 2 Orde 2 Orde 2 Orde 6
Gambar 2.15 Diagram blok kaskade untuk filter orde tinggi
Untuk meng-kaskade-kan bagian-bagian secara benar, maka besarnya
Tabel 2.1 Nilai Faktor Redaman Untuk Tanggapan Filter Butterworth
Orde Kutub Kecuraman
(dB / Octav)
2.1.
Penguat Operasional (Operational Amplifier, Op-Amp) Sebagai
Pembangun Dasar
2.2.1. Dasar-Dasar Penguat Operasional
Istilah penguat operasional atau Op-Amp awalnya dikenal dalam bidang
elektronika analog dan biasanya digunakan untuk operasi-operasi aritmatika seperti
penjumlahan, integrasi, dan lain lain. Op-Amp sebenarnya merupakan sebuah
penguat tegangan DC diferensial. Adapun simbol Op-Amp dalam suatu rangkaian
Gambar 2.16 Simbol Op-Amp (dalam rangkaian)
Karakteristik ideal yang dimiliki Op-Amp, yaitu : lebar pita yang tak
berhingga (infinite bandwidth), impedansi masukan yang tak berhingga (infinite
input impedance), dan impedansi keluaran sama dengan nol (zero output
impedance). Dari gambar 2.16 terlihat bahwa Op-Amp memiliki dua masukan,
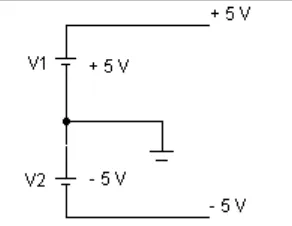
yaitu masukam positif (V+) dan masukan negatif (V-). Biasanya Op-amp diberi catu
daya dengan polaritas ganda atau bipolar dalam jangkauan ± 5 volt hingga ± 15
volt. Untuk keperluan eksperimen yang murah, dapat dibuat catu daya bipolar
sederhana seperti ditunjukkan pada gambar 2.17.
Seperti telah disebutkan sebelumnya, Op-Amp memiliki dua masukan.
Perbedaan antara keduanya adalah sebagai berikut :
1. Jika sinyal melalui masukan positif (+), maka keluaran yang dihasilkan adalah
sefase dengan masukan. Atau dapat dikatakan, jika masukan positif maka
keluaran yang dihasilkan juga positif.
2. Jika sinyal melalui masukan negatif (-), maka keluaran yang dihasilkan adalah
berbeda fase 180º atau setengah siklus. Atau dapat dikatakan, jika sinyal
masukan positif maka keluaran yang dihasilkan menjadi negatif.
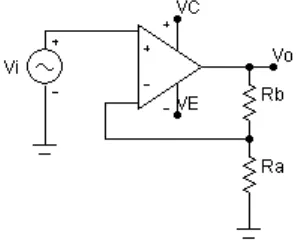
Agar status keluarannya mengindikasikan mana diantara kedua tegangan
masukan yang lebih besar, maka suatu Op-Amp dapat digunakan sebagai
comparator. Dengan menerapkan bias DC pada masukan Op-Amp, level transisi
dapat diset pada level tegangan yang diinginkan. Hal ini tergantung pula pada
polaritas bias dan pada terminal Op-Amp yang diberi bias. Non inverting
comparator dengan bias positif ditunjukkan oleh gambar gambar 2.18.
-Vsat
Vsat Vi Vo
Vref
Dari gambar 2.18 terlihat bahwa saat Vi < Vref maka Vo = -Vsat,
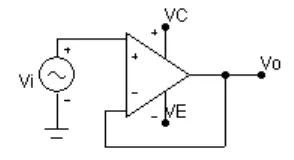
sedangkan saat Vi > Vref maka Vo = Vsat. Inverting comparator dengan bias
positif ditunjukkan oleh gambar 2.19.
Vsat
-Vsat Vref Vo
Vi
Gambar 2.19Invertingcomparator dengan bias positif
Dari gambar 2.19 terlihat bahwa saat Vi < Vref maka Vo = Vsat,
sedangkan saat Vi > Vref maka Vo = -Vsat. Selanjutnya pada
pembahasan-pembahasan berikutnya, rangkaian Op-Amp yang digunakan dalam filter aktif
selalu berbentuk atau menggunakan umpan balik eksternal yang berguna untuk
menstabilkan karakteristik Op-Amp itu sendiri.
2.2.2. Penguat Membalik (Inverting Amplifier)
Rangkaian penguat inverting ditunjukkan pada gambar 2.20, dengan Ra
Gambar 2.20 Rangkaian penguat inverting
Penguatan tegangan atau perbandingan tegangan keluaran terhadap
tegangan masukan dapat dituliskan sebagai :
a b
i o
R R V
V
−
= (2.27)
Dengan demikian, penguatan tegangan bisa kurang dari 1, sama dengan 1
(unity) atau lebih dari 1. Biasanya Ra = 1 kΩ, karena impedansi masukan penguat
inverting tersebut sama dengan Ra. [10]
2.2.3. Penguat Tidak Membalik (Non Inverting Amplifier)
Rangkaian penguat non inverting ditunjukkan oleh gambar 2.21.
Persamaan untuk menentukan penguatan tegangan adalah :
a b
i o
R R V
V
+
=1 (2.28)
Berbeda dengan penguat inverting, pada penguat non inverting penguatan tegangan
selalu lebih besar dari 1. Perbedaan ini terlihat pada persamaan (2.27) dan (2.28).
2.2.4. Pengikut Tegangan (Voltage Follower)
Pengikut tegangan kadang-kadang disebut sebagai penyangga atau buffer
dan memiliki fungsi yang sama seperti pengikut emiter (emitter follower). Ciri-ciri
yang dimiliki, yaitu : impedansi masukan yang sangat tinggi (lebih dari 100KΩ)
dan impedansi keluaran yang sangat rendah (kurang dari 75Ω). Gambar 2.22
menunjukkan rangkaian pengikut tegangan.
Gambar 2.22 Rangkaian pengikut tegangan
Jika dibandingkan dengan rangkaian penguat non inverting (gambar 2.21),
pada rangkaian pengikut tegangan, Ra = ∞ dan Rb = 0. Dengan demikian, penguatan
1 =
i o
V V
(2.29)
Sehingga dapat diketahui bahwa sinyal keluaran sama persis (identik)
dengan sinyal masukan atau keluaran mengikuti masukan. Fungsi utama dari
rangkaian ini adalah sebagai penyangga atau mengisolasi beban dari sumber.
Sebagai contoh, gambar 2.23 menunjukkan suatu penguat inverting tanpa
pengikut tegangan, yang mana terlihat bahwa sumber isyarat dihubungkan ke
masukan inverting.
Gambar 2.23 Rangkaian penguat inverting tanpa pengikut tegangan
Berdasarkan gambar 2.23, apabila sumber impedansi tinggi dihubungkan
ke sebuah penguat inverting, penguatan tegangan dari Vout ke Egen tidak ditentukan
oleh Rf dan Ri, seperti pada persamaan yang umum untuk penguat inverting.
Penguatan yang sesungguhnya harus meliputi Rint, sehingga persamaan untuk
int
Hal tersebut memperlihatkan bahwa Egen terbagi antara Rint dan Ri sehingga
tegangan masukan Ein menjadi kecil.
gen
Untuk mengatasi hal tersebut, sangat diperlukan penggunaan pengikut
tegangan sebagai penyangga sebelum dihubungkan ke masukan Op-Amp. Pengikut
tegangan digunakan apabila tahanan masukan (Rint) dari suatu rangkaian
pembangkit sangat besar sehingga arus yang dialirkan dari sebuah sumber
Sistem telemetri ini terdiri dari dua bagian besar yaitu bagian pemancar dan penerima seperti yang ditunjukkan pada gambar 3.1.
Blok B
Bagian Penerima
Blok A
Bagian Pemancar
Gambar 3.1 Diagram blok sistem telemetri secara umum
Diagram blok bagian penerima ditunjukkan oleh gambar 3.2 berikut ini:
Penerima
LPF fc = 20 kHz
LPF fc = 7 kHz
BPF 8 kHz – 13 kHz
HPF fc = 14 kHz
Komparator Komparator Komparator
MIKROKONTROLER Demodulator
Pembagi Tegangan dan Penyangga
Pembagi Tegangan dan Penyangga
Pembagi Tegangan dan Penyangga
3.1. Filter
Aktif
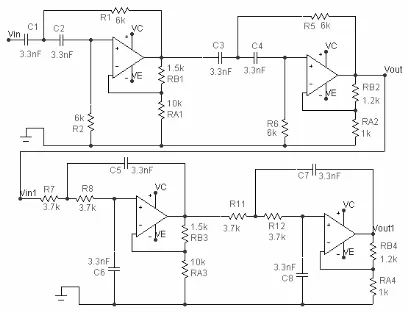
3.1.1. Low Pass Filter dengan fc = 20 kHz
Rangkaian Low Pass Filter atau tapis pelewat rendah yang dirancang pada
sistem ini adalah rangkaian tapis pelewat rendah Butterworth orde ke-4. Untuk
mendapatkan rangkaian tapis orde ke-4 adalah dengan cara menggabungkan
(kaskade) dua rangkaian tapis orde ke-2 dengan prinsip “komponen sama” (equal
component). Rangkaian ini dirancang untuk memisahkan sinyal keluaran dari
penerima FM sehingga sinyal-sinyal tersebut terpisah dalam frekuensi tertentu
untuk membedakan frekuensi yang akan digunakan untuk sistem pengukuran.
Rangkaian ini dirancang dengan frekuensi cutoff = 20 KHz sehingga dapat
ditentukan nilai dari R
1 = R2 dan C1 = C2 berdasarkan persamaan (2.6) adalah:
Dari tabel 2.1, dapat ditentukan:
Faktor redaman (α) untuk besarnya nilai R
A dan RB adalah:
1. Bagian pertama
A
Sehingga diperoleh hasil perancangan untuk Low Pass Filter orde ke-4
Gambar 3.3Low Pass Filter 20 kHz
3.1.2. Low Pass Filter dengan fc = 7 kHz
Rangkaian Low Pass Filter atau tapis pelewat rendah yang dirancang pada
sistem ini adalah rangkaian tapis pelewat rendah Butterworth orde ke-4. Tapis
pelewat rendah ini dirancang untuk meloloskan frekuensi yang mewakili data
terukur dari sensor 1. Rangkaian ini dirancang dengan frekuensi cut-off = 7 KHz,
sehingga dapat ditentukan nilai dari R
Digunakan R = 6,8 kΩ.
Dari tabel 2.1, dapat ditentukan:
Faktor redaman (α) untuk besarnya nilai R
A dan RB adalah:
Sehingga diperoleh hasil perancangan untuk Low Pass Filter orde ke-4
Gambar 3.4 Low Pass Filter 7 kHz
3.1.3. Band Pass Filter dengan fL = 8 kHz dan fH = 13 kHz
Rangkaian Band Pass Filter atau tapis pelewat jalur yang dirancang pada
sistem ini terdiri dari rangkaian tapis pelewat atas (HPF) Butterworth orde ke-4
dengan frekuensi cut-off 8 kHz yang di kaskade dengan tapis pelewat rendah
(LPF) Butterworth orde ke-4 dengan frekuensi cut-off 13 kHz sehingga
didapatkan suatu rangkaian Band Pass Filter (BPF) orde ke-4 dengan frekuensi
cut-off bawah (fL) sebesar 8 kHz dan frekuensi cut-off atas (fH) sebesar 13 kHz.
Tapis pelewat jalur ini dirancang untuk meloloskan frekuensi yang mewakili data
terukur dari sensor 2. Dengan nilai fL dan fH, dapat diketahui lebar bandwidth (B),
frekuensi pusat (fO) dan faktor kualitas (Q) sesuai dengan persamaan 2.23, 2.24
B = f2 – f1
Rangkaian ini dirancang dengan frekuensi cut-off = 13 KHz, sehingga
dapat ditentukan nilai dari R
1 = R2 dan C1 = C2 berdasarkan persamaan (2.6)
Dari tabel 2.1, dapat ditentukan:
Faktor redaman (α) untuk besarnya nilai R
1. Bagian pertama
Sehingga diperoleh hasil perancangan untuk Low Pass Filter orde ke-4
Gambar 3.5 Low Pass Filter 13 kHz
3.1.3.2. High Pass Filter dengan fc = 8 kHz
Rangkaian ini dirancang dengan frekuensi cut-off = 8 KHz, sehingga
dapat ditentukan nilai dari R
1 = R2 dan C1 = C2 berdasarkan persamaan (2.6)
Dari tabel 2.1, dapat ditentukan:
Faktor redaman (α) untuk besarnya nilai R
1. Bagian pertama
Sehingga diperoleh hasil perancangan untuk High Pass Filter orde
\
Gambar 3.6 High Pass Filter 8 kHz
Dari perhitungan perancangan LPF dan HPF orde ke-4, maka dengan
meng-kaskade-kan kedua tapis tersebut didapat suatu rangkaian Band Pass
Filter (BPF) Butterworth orde ke-4 dengan frekuensi cut-off bawah (fL) = 8 kHz
Gambar 3.7 Band Pass Filter 8 - 13 kHz
3.1.4. High Pass Filter dengan fc = 14 kHz
Rangkaian High Pass Filter atau tapis pelewat atas yang dirancang pada
sistem ini adalah rangkaian tapis pelewat atas Butterworth orde ke-4. Tapis
pelewat atas ini dirancang untuk meloloskan frekuensi yang mewakili data
terukur dari sensor 3. Rangkaian ini dirancang dengan frekuensi cut-off = 14 KHz,
sehingga dapat ditentukan nilai dari R
1 = R2 dan C1 = C2 berdasarkan persamaan
RC
Dari tabel 2.1, dapat ditentukan:
Faktor redaman (α) untuk besarnya nilai R
A dan RB seperti halnya pada
perancangan Low Pass Filter sebagai berikut:
A B
R R
= 1,2346
Diambil nilai R
A = 1 kΩ maka RB = 1,234 kΩ.
Digunakan RB = 1,2 kΩ.
Sehingga diperoleh hasil perancangan untuk Low Pass Filter orde ke-4
seperti ditunjukkan oleh gambar 3.8.
Gambar 3.8 High Pass Filter 14 kHz
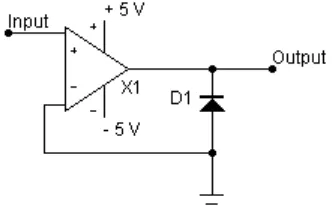
3.2.
Rangkaian Pembanding (Comparator)
Perancangan rangkaian pembanding ini menggunakan Op-Amp dengan seri
LM741 sebagai pembanding dan dioda seri 1N4001 seperti terdapat dalam gambar
3.9. Rangkaian pembanding akan membandingkan tegangan masukan dengan
tegangan acuan. Bila tegangan masukan lebih kecil dari tegangan acuan, maka
tegangan saturasi Op-Amp yang digunakan adalah -5 Volt. Sedangkan bila tegangan
masukan lebih tinggi dari tegangan acuan, maka pembanding akan memberikan
keluaran sebesar batas saturasi positif, dalam hal ini tegangan saturasi Op-Amp yang
digunakan adalah +5 Volt. Tegangan acuan yang digunakan disini adalah 0 Volt.
Sementara dioda berfungsi untuk menghilangkan fase negatif dari keluaran rangkaian
pembanding, sehingga hasil keluaran akhir yang didapatkan adalah suatu sinyal
gelombang kotak dengan batas atas = 5 Volt dan batas bawah = 0 Volt.
Gambar 3.9 Rangkaian Pembanding(Comparator)
3.3.
Rangkaian Penyangga (Buffer)
Perancangan buffer menggunakan Op-Amp dengan seri LM741, seperti
pada gambar 3.10. Sesuai dengan dasar teori, tegangan keluaran pada buffer
sama dengan tegangan masukan, dengan demikian penguatan tegangan yang
dihasilkan sama dengan 1. Penyangga digunakan karena memiliki impedansi
masukan yang tinggi dan impedansi keluaran yang rendah, maka arus yang
dihubungkan dengan rangkaian lain, tegangan yang dihasilkan tidak mengalami
penurunan.
Pada bab ini akan ditunjukkan hasil pengamatan dan pembahasan dari Filter Butterworth Untuk Sistem Telemetri Termodulasi Frekuensi Dengan Metode Multitone. Pengujian alat dilakukan dengan cara mengamati masukan dan keluaran pada setiap bagian dari sistem yang ada.
4.1 LOW PASS FILTER 20 kHz
Pada bagian low pass filter yang pertama, yaitu low pass filter dengan frekuensi cut-off 20 kHz, frekuensi – frekuensi yang diterima oleh penerima FM
= 0,707×3 Vpp = 2,12 Vpp
Letak frekuensi pada saat penguatan sebesar 2,12 Vpp berada pada 18503,5 Hz, jadi terdapat selisih sebesar 1496,5 Hz antara frekuensi cut-off perancangan (20 kHz) dengan hasil pengukuran (18503,5 Hz). Kesalahan yang terjadi pada perancangan dapat dihitung dengan rumus:
Galat frekuensi cut-off = ( − )×100%
Sehingga didapatkan besarnya nilai kesalahan sebagai berikut:
Galat frekuensi cut-off = 100%
LPF 20 kHz
Gambar 4.1 Grafik Tanggapan Frekuensi LPF 20 kHz.
4.2 LOW PASS FILTER 7 kHz
Pada bagian low pass filter yang kedua, yaitu low pass filter dengan frekuensi
cut-off 7 kHz, filter ini digunakan untuk meredam frekuensi diatas 7 kHz agar daerah frekuensi yang digunakan untuk sensor 1 tidak terganggu oleh frekuensi lainnya. Sinyal masukan dan keluaran dari LPF 7 kHz dapat dilihat pada gambar Lampiran B2.1 dan gambar Lampiran B2.2. Sebagai perbandingan, juga dilampirkan gambar sinyal keluaran kedua filter lainnya dengan amplitudo dan frekuensi masukan yang sama pada gambar Lampiran B2.3 dan gambar Lampiran B2.4. Dengan memberi masukan sebesar 2,5 Vpp, maka dapat dihitung penguatan tegangan yang diperoleh seperti dalam tabel Lampiran A2. Dari tabel Lampiran A2 juga dapat diperoleh hubungan antara frekuensi dan penguatan dalam dB dalam bentuk grafik sebagaimana ditunjukkan oleh gambar 4.2. Berdasarkan tabel Lampiran A2 dapat ditunjukkan bahwa frekuensi cut-off dari LPF adalah pada saat penguatan tegangannya turun sebesar 0,707 dari penguatan maksimum.
= 0,707×2,64 Vpp = 1,8 Vpp
Sehingga didapatkan besarnya nilai kesalahan sebagai berikut:
Berdasarkan hasil perhitungan diatas terlihat bahwa nilai galat cukup kecil. Galat yang terjadi disebabkan oleh kesalahan pada sistem, terutama pada penentuan nilai komponen, yang mana masing-masing komponen mempunyai nilai toleransi sehingga jika digunakan pada sistem dan dilakukan pengujian maka akan menghasilkan nilai yang sedikit menyimpang. Pemilihan nilai komponen dengan toleransi dimaksudkan untuk menekan biaya pembuatan alat.
LPF 7 kHz
4.3 BAND PASS FILTER 8-13 kHz
Pada bagian band pass filter, yaitu band pass filter dengan frekuensi cut-off
bawah sebesar 8 kHz dan frekuensi cut-off atas sebesar 13 kHz, filter ini digunakan untuk meredam frekuensi dibawah 8 kHz dan diatas 13 kHz agar daerah frekuensi yang digunakan untuk sensor 2 tidak terganggu oleh frekuensi lainnya. Sinyal masukan dan keluaran dari BPF 8-13 kHz dapat dilihat pada gambar Lampiran B3.1 dan gambar Lampiran B3.2. Sebagai perbandingan, juga dilampirkan gambar sinyal keluaran kedua filter lainnya dengan amplitudo dan frekuensi masukan yang sama pada gambar lampiran B3.3 dan gambar Lampiran B3.4. Dengan memberi masukan sebesar 2,5 Vpp, maka dapat dihitung penguatan tegangan yang diperoleh seperti dalam tabel Lampiran A3. Dari tabel Lampiran A3 juga dapat diperoleh hubungan antara frekuensi dan penguatan dalam dB dalam bentuk grafik sebagaimana ditunjukkan oleh gambar 4.3. Berdasarkan tabel Lampiran A3 dapat ditunjukkan bahwa frekuensi cut-off dari BPF adalah pada saat penguatan tegangannya turun sebesar 0,707 dari penguatan maksimum.
= 0,707×3,92 Vpp = 2,77 Vpp
perancangan (13 kHz) dengan hasil pengukuran (13176 Hz). Kesalahan yang terjadi pada perancangan dapat dihitung dengan rumus:
Galat frekuensi cut-off = ( − )×100%
Sehingga didapatkan besarnya nilai kesalahan sebagai berikut:
Galat frekuensi cut-off bawah = 100%
Berdasarkan hasil perhitungan diatas terlihat bahwa nilai galat untuk frekuensi cut-off
BPF 8-13 kHz
Av max=11,865 dB Fo = 10685 Hz
Av -3dB Av max, FcH= 13176 Hz
Gambar 4.3 Grafik Tanggapan Frekuensi BPF 8-13 kHz
4.4 HIGH PASS FILTER 14 kHz
Bagian ini membahas high pass filter dengan frekuensi cut-off 14 kHz. Filter
dalam tabel Lampiran A4. Dari tabel Lampiran A4 juga dapat diperoleh hubungan antara frekuensi dan penguatan dalam dB dalam bentuk grafik sebagaimana ditunjukkan oleh gambar 4.4. Berdasarkan tabel Lampiran A4 dapat ditunjukkan bahwa frekuensi cut-off dari HPF adalah pada saat penguatan tegangannya turun sebesar 0,707 dari penguatan maksimum.
= 0,707×2,2 Vpp = 1,55 Vpp
Letak frekuensi pada saat penguatan sebesar 1,55 Vpp berada pada 13586 Hz, jadi terdapat selisih sebesar 414 Hz antara frekuensi cut-off perancangan (14 kHz) dengan hasil pengukuran (13586 Hz). Kesalahan yang terjadi pada perancangan dapat dihitung dengan rumus:
Galat frekuensi cut-off = ( − )×100%
Sehingga didapatkan besarnya nilai kesalahan sebagai berikut:
Galat frekuensi cut-off = 100%
yang sedikit menyimpang. Pemilihan nilai komponen dengan toleransi dimaksudkan untuk menekan biaya pembuatan alat.
HPF 14 kHz
Gambar 4.4 Grafik Tanggapan Frekuensi HPF 14 kHz.
4.5 Pembanding (Comparator)
referensi menjadi sama dengan batas saturasi negatif, dalam hal ini tegangan saturasi op-amp yang digunakan adalah -5 Volt. Tegangan referensi yang digunakan disini adalah 0 Volt. Sementara dioda berfungsi untuk menghilangkan fase negatif dari keluaran rangkaian pembanding, sehingga hasil keluaran akhir yang didapatkan adalah suatu sinyal gelombang kotak dengan batas atas = 5 Volt dan batas bawah = 0 Volt. Keluaran akhir dari rangkaian pembanding dengan dioda untuk masing-masing
filter ditunjukkan oleh gambar Lampiran B5, B6, dan B7.
4.6 Pembahasan Kinerja Sistem Dengan Sinyal Masukan Gelombang Kotak
Dan Frekuensi Yang Berbeda
Tabel 4.1 Kinerja Filter dengan Sinyal Masukan Gelombang Kotak dan Frekuensi Masukan Yang Berbeda
Masukan Tegangan Keluaran (Vpp)
Frekuensi
Dari tabel 4.1 dan gambar Lampiran B8 dapat diamati bahwa ternyata kinerja masing-masing filter masih terpengaruh oleh interferensi frekuensi filter lainnya. Karena pada frekuensi yang sama untuk LPF 7 kHz dan BPF 13 kHz serta BPF 8-13 kHz dan HPF 14 kHz ternyata tegangan keluarannya belum diredam sepenuhnya sehingga frekuensi diluar batas cut-off filter masih dapat terbaca oleh filter lainnya. Hal ini disebabkan karena penggunaan filter dengan orde yang rendah. Sedangkan untuk keluaran akhir dari sistem, yaitu pada rangkaian pembanding sudah bekerja dengan baik karena dapat menghasilkan sinyal keluaran berupa gelombang kotak.
4.7 Analisa Kinerja Sistem Dengan Masukan Sinyal Terjumlah
Gambar 4.5(a) Sinyal terjumlah masukan Sistem dengan Amplitudo 9 Vpp Sinyal 1 dengan Amplitudo 5 Vpp, Frekuensi 1965 Hz
Sinyal 2 dengan Amplitudo 4 Vpp, Frekuensi 10572 Hz Sinyal 3 dengan Amplitudo 3 Vpp, Frekuensi 17365 Hz
Gambar 4.5(b) Sinyal terjumlah untuk masukan Sistem setelah pembagi tegangan dengan Amplitudo 3 Vpp
Gambar 4.6(b) Sinyal keluaran LPF 20 kHz setelah pembagi tegangan dengan masukan sinyal terjumlah
Tabel 4.2 Kinerja Filter Dengan Masukan Sinyal Terjumlah
Masukan Tegangan Keluaran (Vpp) Vi(Vpp) Frekuensi(Hz) LPF 7 kHz BPF 8-13 kHz HPF 14 kHz
5 1965 4,8 - -
4 10572 - - -
3 17365 - - -
tabel Lampiran A2, A3 dan A4 juga dapat diperoleh hubungan antara frekuensi dan penguatan dalam dB secara keseluruhan dalam bentuk grafik sebagaimana ditunjukkan oleh gambar 4.10.
Gambar 4.7(a) Sinyal keluaran LPF 7 kHz dengan masukan sinyal terjumlah, Amplitudo 4,8 Vpp
Gambar 4.8(a) Sinyal keluaran BPF 8-13 kHz dengan masukan sinyal terjumlah
Gambar 4.8(b) Keluaran akhir BPF 8-13 kHz setelah Rangkaian Pembanding dengan masukan sinyal terjumlah
Gambar 4.9(b) Keluaran akhir HPF 14 kHz setelah Rangkaian Pembanding dengan masukan sinyal terjumlah
Dari gambar 4.7(b) dapat dilihat bahwa komparator mendeteksi perubahan sinyal masukan pada daerah sekitar puncak amplitudo negatif, sehingga derau dari sinyal masukan komparator memicu perubahan bentuk sinyal keluaran komparator. Masalah ini dapat diatasi dengan cara memperbesar tegangan acuan pada komparator.
Tanggapan Frekuensi LPF, BPF dan HPF
0
Dari gambar 4.10 dapat dilihat bahwa untuk LPF 7 kHz masih melewatkan frekuensi diluar batas frekuensi cut-off filter. Demikian juga untuk BPF 8-13 kHz dan HPF 14 kHz. Hal ini yang menyebabkan terjadinya interferensi frekuensi pada daerah sekitar frekuensi pembatas antar filter (daerah arsir), sehingga data yang ditransmisikan pada frekuensi ini tidak dapat terdefinisi oleh alat ukur yang digunakan.
4.8 Pembahasan Secara Keseluruhan
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan analisis terhadap data yang diperoleh dari hasil penelitian dan pembahasan, maka dapat disimpulkan:
1. Berdasarkan hasil dari pengamatan terhadap masing-masing filter secara terpisah, dapat disimpulkan bahwa filter telah bekerja dengan baik. Hal ini dapat dilihat dari kinerja filter yang telah dapat memisahkan antara frekuensi
pass band dari frekuensi stop band mendekati perancangan. Frekuensi cut-off
hasil pengukuran dengan frekuensi cut-off perancangan mengalami perbedaan, karena nilai komponen yang dipakai tidak sesuai dengan nilai perancangan, karena tidak tersedia dipasaran.
2. Besar galat frekuensi cut-off untuk LPF 20 kHz sebesar 7,48 %, galat frekuensi cut-off untuk LPF 7 kHz sebesar 2,11 %, galat frekuensi cut-off
bawah untuk BPF 8-13 kHz sebesar 5,1 % dan galat frekuensi cut-off atas untuk BPF 8-13 kHz sebesar 1,35 % serta galat frekuensi cut-off untuk HPF 14 kHz sebesar 2,95 %.
dengan orde yang rendah, sehingga sinyal keluaran filter masih terinterferensi oleh frekuensi lain diluar batas frekuensi cut-off filter.
5.2 Saran
Untuk pengembangan alat lebih lanjut, maka penulis menyarankan beberapa hal berikut:
1. Secara teoritis, penggunaan filter dengan orde yang lebih tinggi akan memberikan respon tanggapan frekuensi yang kemiringannya lebih curam, sehingga dapat meminimalisai interferensi frekuensi antar filter.
2. Perancangan keseluruhan filter dengan penguatan yang sama, misal dengan penguatan 1 (unity) sehingga besar tegangan referensi pada rangkaian pembanding dapat disesuaikan untuk meminimalisasi interferensi frekuensi. 3. Perlu diperhatikan bahwa nilai komponen yang digunakan sedapat mungkin
DAFTAR PUSTAKA
[1] Primawan, A.Bayu, Martanto, Dian M.Mulya, 2005, Implementasi Pemancar Telemetri Suhu Termodulasi Frekuensi, Seminar Nasional Mekatronika 2005, Fak.Teknik USD, Yogyakarta
[2] Martanto, A.Bayu Primawan, Dian M.Mulya , 2005, Implementasi Penerima Telemetri Suhu Termodulasi Frekuensi, Seminar Nasional Mekatronika 2005, Fak.Teknik USD, Yogyakarta
[3] Putra, Agfianto Eko, 2002, Penapis Aktif Elektronika : Teori dan Praktek, C.V.Gava Media, Yogyakarta.
[4] Valkenburg, VME., 1982, Analog Filter Design, CBS College Publishing, New York.
[5] Roddy, Dennis, Coolen, J., 1995, Komunikasi Elektronik, PT Prenhallindo, Jakarta.
[6] Stanley, William.D., 1994, Operational Amplifiers With Linear Integrated Circuits, Macmillan College Publishing Company, Inc., New York.
[7] Irvine, Robert G., 1994, Operational Amplifier Characteristics And Applications, Prentice-Hall, Inc., New Jersey.
[8] Malvino, Albert Paul, 1986, Prinsip-Prinsip Elektronika, Penerbit Erlangga, Jakarta.
Keterangan 10 = Keluaran Sistem Gambar implementasi perangkat keras (tampak atas) 11,12 = Masukan Sistem
13 = Ground