BAB 2
LANDASAN TEORI
Kegiatan perontokan padi dilakukan setelah kegiatan panen menggunakan sabit atau alat mesin panen (reaper). Kegiatan perontokan ini dapat dilakukan secara tradisional (manual) atau menggunakan mesin perontok. Secara tradisional kegiatan perontokan akan menghasilkan susut tercecer yang relatif besar, mutu gabah yang kurang baik, dan membutuhkan tenaga yang cukup melelahkan. Mesin perontok dirancang untuk mampu memperbesar kapasitas kerja, meningkatkan effisiensi kerja, mengurangi kehilangan hasil dan memperoleh mutu hasil gabah yang baik.
2.1 Power Tresher (Tresher Mekanis)
Power tresher merupakan alat perontok yang digerakkan oleh motor bakar atau
motor listrik melalaui sistem transmisi. Pengumpanan padi yang dirontokkan dengan cara memegang tangkai padi pada bagian malai diletakkan di bawah atau di atas silinder perontok atau dengan melepas padi keruang perontok.
Power Thresher ini dapat dipakai untuk merontok biji-bijian (padi, jagung dan
kedelai) dan dilengkapi dengan pengayak sehingga biji – bijian yang dihasilkan relatif bersih (Gambar 2.1).
Gambar 2.1 power tresher
Power tresher ini selanjutnya berkembang dan beredar di pasar Indonesia
dengan modifikasi yang berbeda-beda tergantung kepada merk dan model yang dikembangkan oleh masing-masing pabrikan.
2.2 Mikrokontroler
Mikrokontroler adalah sebuah prosesor yang dipergunakan khusus untuk keperluan kontrol. Berbeda dengan mikroprosesor, mikrokontroler sendiri sudah memiliki device teretentu yang diperlukan untuk keperluan control. Mikrokontroler yang akan penulis gunakan dalam percobaan ini adalah ATMEGA8535.
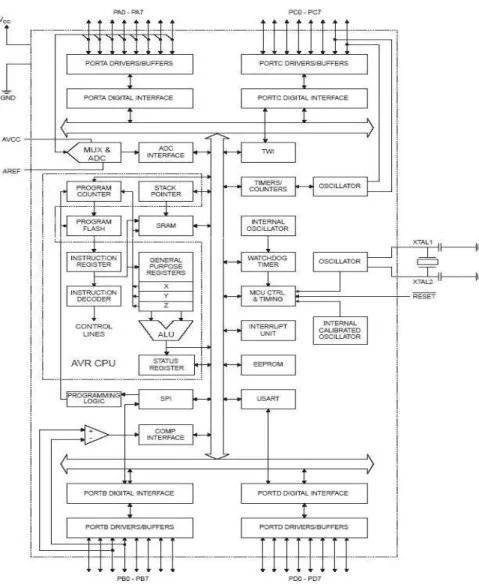
Mikrokontroler AVR memiliki arsitektur Reduced Instruction Set Computer (RISC), terdapat Internal Oscillator, I/O port, Timers, USART, SPI, pull-up resistors,
fitur lainnya sehingga penggunaan AVR dapat membatasi kebutuhan penggunaan komponen eksternal. AVR memiliki 32 General Purpose Registers yang terhubungan langsung dengan Arithmetic Logic Unit (ALU). Blok diagram dari AVR ATMEGA8535 dapat dilihat pada Gambar 2.2.
AVR mendukung beberapa jenis bahasa pemrograman dan system development tools seperti C Compilers, Macro Assemblers, Program Debugger/Simulators,
In-Circuit Emulators, dan Evaluation Kits.
Terdapat beberapa jenis Development tools dalam perancangan aplikasi AVR seperti ImageCraft Creation (ICC) AVR, Code Vision, AVR Studio, dan lain-lain sebagainya. Terdapat beberapa development tools yang langsung mendukung untuk pemrogramman program ke dalam flash memory dari AVR seperti AVR Studio,
CodeVision, dan lain-lain sebagainya. Sementara development tools yang dipakai dalam
praktikum yaitu ICC AVR tidak mendukung untuk penulisan program ke flash memory dari AVR. Penulisan program ke AVR digunakan program yang berbeda yaitu
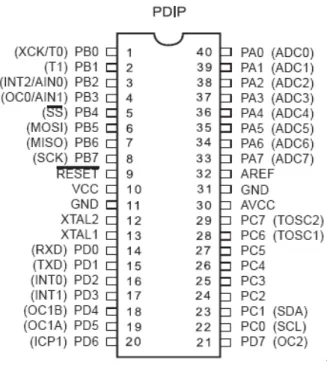
Ponyprog dengan protokol komunikasi Serial Peripheral Interface (SPI). AVR
ATMEGA8535 yang diproduksi oleh ATMEL terdiri atas beberapa jenis package, yang digunakan dalam praktikum yaitu dalam bentuk PDIP, spesifikasi pin dari ATMEGA8535 dapat dilihat pada gambar 2.3
.
Gambar 2.3 Spesifikasi pin ATMEGA8535
2.3 Sensor Ultrasonik
Pada alat ini sensor yang digunakan didalam penelitian ini adaalah sensor Ping. Adapun pengertian dari sensor ping adalah ini berfungsi untuk mengukur jarak sebuah benda solid dalam range 3 – 300 cm dengan cukup presisi dan tanpa kontak fisik. Kelebihan sensor ini ialah hanya membutuhkan 1 sinyal (SIG), tegangan 5V dan ground. Perhatikan gambar 2.4 di bawah ini :
Spesifikasi sensor ini :
· Kisaran pengukuran 3cm – 300 cm
· Input trigger –positive TTL pulse, 2uS min., 5uS tipikal
· Echo hold off 750uS dari fall of trigger pulse · Delay sebelum pengukuran berikutnya 200uS
· Burst indicator LED menampilkan aktifitas sensor.
Gelombang ini melalui udara dengan kecepatan 344 m/s, lalu mengenai obyek dan memantul kembali ke sensor. Ping mengeluarkan pulsa output high pada pin SIG setelah memancarkan gelombang ultrasonik dan setelah gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG. Lebar pulsa High (tIN) akan sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan obyek. Maka jarak yang diukur ialah [(tIN s x 344 m/s) : 2]m.
2.4 Jenis Motor Listrik
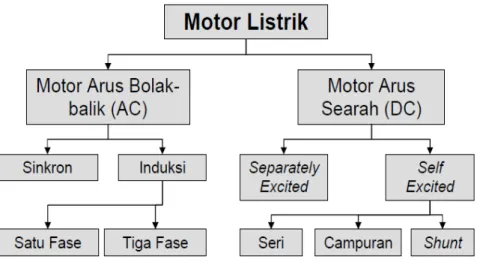
Motor Listrik ada 2 yaitu motor AC dan DC. Motor AC dan DC juga terbagi menjadi beberapa bagian lagi, jika digambarkan maka akan terlihat seperti pada Gambar 2.5
Gambar 2.5 Klasifikasi jenis utama motor listrik
2.4.1 Motor DC
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
Gambar 2.6 Motor DC
Kutub Medan
Motor DC memiliki 2 kutub medan magnet yaitu kutub utara dan kutub selatan yang stasioner dan dynamo yang menggerakkan bearing pada ruang diantara kutub medan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub dari utara ke selatan.
Dinamo
Dinamo pada motor DC berbentuk silinder, dihubungkan kearah penggerak untuk menggerakkan beban. Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet. Pada motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan berganti lokasi. Saat hal itu terjadi arus yang masuk kedalam motor DC akan berbalik dan merubah kutub-kutub utara dan selatan dinamo.
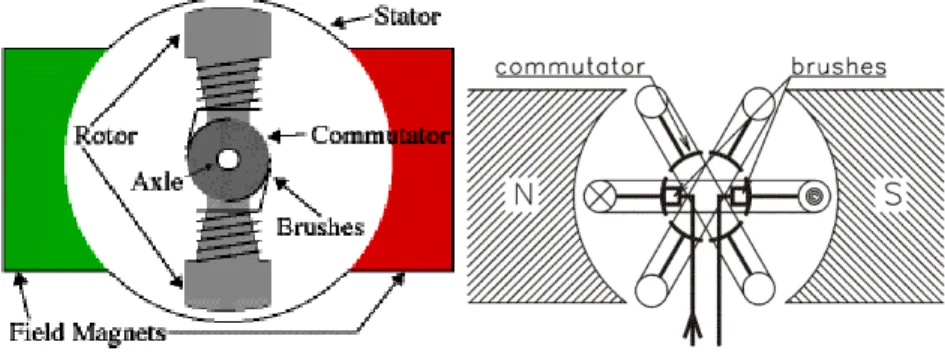
Commutator
Kegunaan komponen ini pada motor DC adalah untuk membalikkan arah arus listrik dalam dinamo, commutator juga membantu motor DC dalam hal transmisi arus antara dinamo dan sumber daya. Bisa dilihat pada Gambar 2.7
Keuntungan penggunaan motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor DC umumnya dibatasi untuk penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang, ini dikarenakan karena sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Motor DC juga relative lebih murah daripada motor AC.
Jenis-jenis motor DC, yaitu sebagai berikut :
• Motor DC sumber daya terpisah / Separately Excited
Motor DC jenis ini adalah dimana jika arus medan dipasok dari sumber terpisah jadi arus yang masuk kedalam motor DC bukanlah arus yang ada pada motor DC itu sendiri melainkan dari sumber yang tepisah.
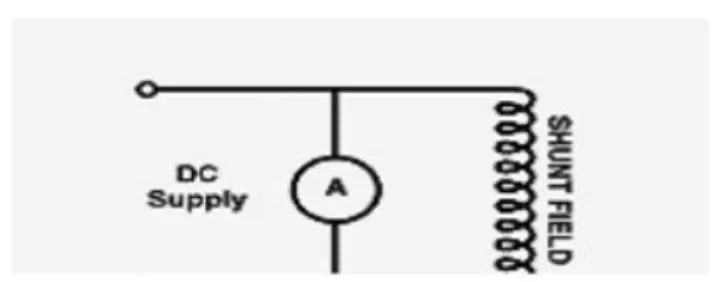
• Motor DC sumber daya sendiri / Self Excited motor shunt
Pada motor shunt , gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo (A) oleh karena itu total arus dalam jalur merupakan penjumlahan arus dan arus dinamo. Jika dijabarkan tentang kecepatan motor shunt adalah sebagai berikut :
o Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga torque tertentu kecepatan berkurang) dan oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah.
o Kecepatan komersial dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah).
• Motor DC daya sendiri/ motor seri
Dalam motor seri, gulungan medan (medan shunt) duhubungkan secara seri dengan gulungan dinamo oleh karena itu arus medan sama dengan arus dinamo. Dimana kecepatan dibatasi pada 5000 RPM dan harus menghindari menjalankan motor seri tanpa ada beban sebab kecepatan motor diluar 5000 RPM tidak dapat dikendalikan. Motor seri cocok untuk penggunaan yang memerlukan torque penyalaan awal yang tinggi.
Gambar 2.8 Rangkaian Motor DC daya sendiri • Motor DC Kompon/gabungan
Motor kompon/ gabungan motor seri dan shunt dimana pada motor kompon gulungan medan dihubungkan secara paralel dan seri dengan gulungan dinamo (A). Motor kompon memiliki torque penylaan awal yang bagus dan kecepatan yang stabil. Makin tinggi persentase penggabungan ( persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula torque penyalaan awal yang dapat ditangani oleh motor ini.
2.4.2 Motor AC
Motor arus bolak-balik menggunakan arus listrik yang membalikkan arahnya secara teratur pada rentang waktu tertentu. Motor listrik memiliki dua buah bagian dasar listrik: "stator" dan "rotor". Rotor merupakan komponen listrik berputar untuk memutar as motor. Keuntungan utama motor DC terhadap motor AC adalah bahwa kecepatan motor AC lebih sulit dikendalikan. Untuk mengatasi kerugian ini, motor AC dapat dilengkapi dengan penggerak frekwensi variabel untuk meningkatkan kendali kecepatan sekaligus menurunkan dayanya. Motor induksi merupakan motor yang paling populer di industri karena kehandalannya dan lebih mudah perawatannya. Motor induksi AC cukup murah (harganya setengah atau kurang dari harga sebuah motor DC) dan juga
memberikan rasio daya terhadap berat yang cukup tinggi (sekitar dua kali motor DC).
Berdasarkan karakteristik dari arus listrik yang mengalir, motor AC (Alternating
Current, Arus Bolak-balik) terdiri dari 2 jenis, yaitu:
1. Motor listrik AC / arus bolak-balik 1 fasa 2. Motor listrik AC / arus bolak-balik 3 fasa
Pada perancangan yang akan dibuat, penulis menggunakan motor listrik AC 1 fasa.
• Prinsip kerja Motor AC Satu Fasa
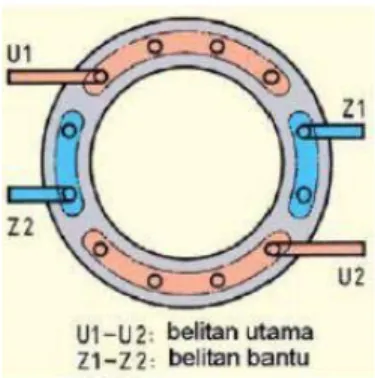
Motor AC satu fasa berbeda cara kerjanya dengan motor AC tiga fasa, dimana pada motor AC tiga fasa untuk belitan statornya terdapat tiga belitan yang menghasilkan medan putar dan pada rotor sangkar terjadi induksi dan interaksi torsi yang menghasilkan putaran. Sedangkan pada motor satu fasa memiliki dua belitan stator,
yaitu belitan fasa utama (belitan U1-U2) dan belitan fasa bantu (belitan Z1-Z2), bisa dilihat pada gambar 2.9
Gambar 2.9 Prinsip Medan Magnet Utama dan Medan magnet
Belitan utama menggunakan penampang kawat tembaga lebih besar sehingga memiliki impedansi lebih kecil. Sedangkan belitan bantu dibuat dari tembaga berpenampang kecil dan jumlah belitannya lebih banyak, sehingga impedansinya lebih besar dibanding impedansi belitan utama. Grafik arus belitan bantu Ibantu dan arus belitan utama Iutama berbeda fasa sebesar φ, hal ini disebabkan karena perbedaan besarnya impedansi kedua belitan tersebut. Perbedaan arus beda fasa ini menyebabkan arus total, merupakan penjumlahan vektor arus utama dan arus bantu. Medan magnet utama yang dihasilkan belitan utama juga berbeda fasa sebesar φ dengan medan magnet bantu.
Gambar 2.10 grafik gelombang arus medan bantu dan arus medan utama
Gambar 2.11 Medan magnet pada Stator Motor satu fasa
Belitan bantu Z1-Z2 pertama dialiri arus Ibantu menghasilkan fluks magnet Φ tegak lurus, beberapa saat kemudian belitan utama U1-U2 dialiri arus utama. yang bernilai positip. Hasilnya adalah medan magnet yang bergeser sebesar 45° dengan arah berlawanan jarum jam. Kejadian ini berlangsung terus sampai satu siklus sinusoida,
sehingga menghasilkan medan magnet yang berputar pada belitan statornya. Rotor motor satu fasa sama dengan rotor motor tiga fasa yaitu berbentuk batang-batang kawat yang ujung-ujungnya dihubung singkatkan dan menyerupai bentuk sangkar tupai, maka sering disebut rotor sangkar.
Gambar 2.12 Rotor sangkar
Belitan rotor yang dipotong oleh medan putar stator, menghasilkan tegangan induksi, interaksi antara medan putar stator dan medan magnet rotor akan menghasilkan torsi putar pada rotor.
2.5 Geckodrive G320X
Gambar 2.13 . Geckodrive G320X
Untuk rangkaian motor driver, digunakan rangkaian motor driver geckodrive.
Geckodrive dikendalikan menggunakan mikrokontroller AVR yang berfungsi untuk
menggerakkan motor DC (2) . Spesifikasi dari modul motor driver ini adalah :
• Pengali/pengganda gelombang step sudah ada di dalam
• Bisa sebagai 2 tipe yaitu mode yang ada sekarang dan mode servo tegangan
• Membatasi torsi dengan batasan waktu
• 4 pengikut batasan error yang dapat diatur
• Pendeteksi kegagalan enkripsi
• Perlindungan arus pendek
• Step common dan direction common dapat antara +5VDC atau GND
• LED untuk kondisi IN-position (di posisi), WARN (peringatan),
FAULT(kesalahan), dan POWER
• Step dan Direction adalah +3,3VDC dan +5VDC kompatibel di 6mA
• 20A 80VDC beroperasi maksimum secara kontinu
• Loop PID tertutup secara internal
• Blok enkripsi untuk input < 1V (logika 0) dan >4 (Logika 1)
• +5VDC 50mA alat enkripsi sudah onboard
• Step yang terisolasi Opto dan input DIRECTION
• frekuensi PWM 20kHz
• Arus dapat diatur batasannya dari 0-20A
2.6 Rotary Encoder
Rotary encoder adalah elektromekanik yang dapat mendeteksi atau memonitor
gerakan dan posisi. Rotary encoder biasanya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat dijadikan gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary encoder.
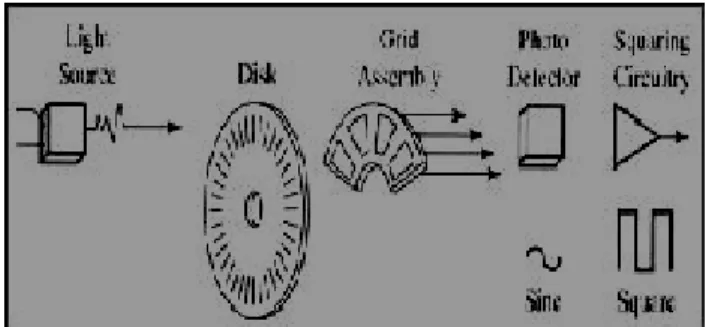
Rotary encoder tersusun dari suatu piringan tipis yang memiliki lubang-lubang
pada bagian lingkaran piringan. LED ditempatkan pada salah satu sisi piringan sehingga cahaya akan menuju ke piringan. Di sisi yang lain suatu photo-transistor diletakkan sehingga photo-transistor ini dapat mendeteksi cahaya dari LED yang berseberangan. Piringan tipis tadi dikopel dengan poros motor berputar lainnya yang ingin kita ketahui posisinya, sehingga ketika motor berputar piringan juga akan ikut berputar. Apabila posisi piringan mengakibatkan cahaya dari LED dapat mencapai photo-transistor melalui lubang-lubang yang ada, maka photo-transistor akan mengalami saturasi dan akan menghasilkan suatu pulsa gelombang persegi. Semakin banyak deretan pulsa yang dihasilkan pada satu putaran menentukan akurasi rotary encoder tersebut, akibatnya semakin banyak jumlah lubang yang dapat dibuat pada piringan menentukan akurasi rotary encoder tersebut.
Gambar 2.15 Blok penyusun rotary encoder
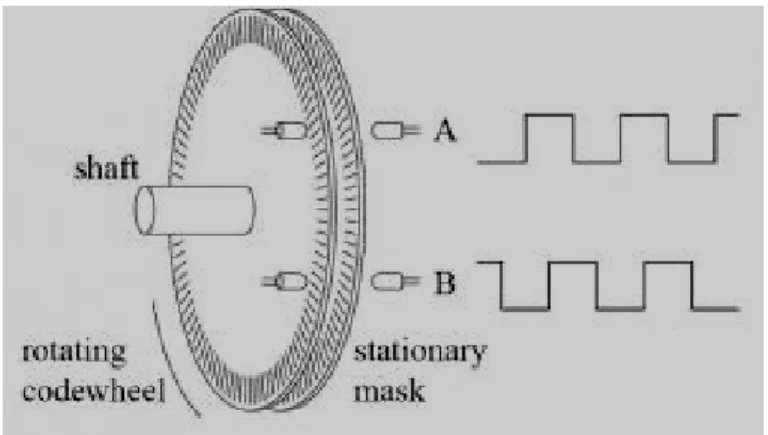
Pada penelitian ini rotary encoder yang digunakan termasuk dalan kategori
incremental encoder. Incremental encoder terdiri dari dua track atau single track dan
dua sensor yang disebut channel A dan B . Ketika poros berputar, deretan pulsa akan muncul di masing-masing channel pada frekuensi yang proporsional dengan kecepatan putar sedangkan hubungan fasa antara channel A dan B menghasilkan arah putaran. Putaran dapat dihitung dengan cara jumlah pulsa yang terjadi terhadap resolusi piringan. Untuk mengetahui arah putaran, dengan mengetahui channel mana yang leading terhadap channel satunya dapat kita tentukan arah putaran yang terjadi karena kedua channel tersebut akan selalu berbeda fasa seperempat putaran (quadrature signal). Quadrature signal atau Sinyal berpangkat sebenarnya terdiri dari 2 sinyal yang biasanya dimisalkan dengan I (untuk phase biasa) dan Q (untuk phase kuadrart) atau dengan RE (untuk sinyal Real) dan IM (untuk sinyal imaginer). Letak perbedaan dari sinyal sebenarnya dengan sinyal kudarat adalah terletak di spektrum dari sinyal kuadrat tidak simetric dengan frequensi 0.
Seringkali terdapat output channel ketiga, disebut INDEX, yang menghasilkan satu pulsa per putaran berguna untuk menghitung jumlah putaran yang terjadi.
Gambar 2.16 . susunan piringan untuk incremental encoder
Resolusi keluaran dari sinyal quadrature A dan B dapat dibuat beberapa macam, yaitu 1X, 2X dan 4X. Resolusi 1X hanya memberikan pulsa tunggal untuk setiap siklus salah satu sinya A atau B, sedangkan resolusi 4X memberikan pulsa setiap transisi pada kedua sinyal A dan B menjadi empat kali resolusi 1X. Arah putaran dapat ditentukan melalui level salah satu sinyal selama transisi terhadap sinyal yang kedua. Pada contoh resolusi 1X, A = arah bawah dengan B = 1 menunjukkan arah putaran searah jarum jam, sebaliknya B = arah bawah dengan A = 1 menunjukkan arah berlawanan jarum jam.
Gambar 2.18 Output dan arah putaran pada resolusi yang berbeda-beda
2.7 Relay
Relay adalah saklar elektronik yang dapat membuka atau menutup rangkaian dengan menggunakan kontrol dari rangkaian elektronik lain. Sebuah relay tersusun atas kumparan, pegas, saklar (terhubung pada pegas) dan 2 kontak elektronik (normally close
dan normally open)
a. Normally close (NC) : saklar terhubung dengan kontak ini saat relay tidak aktif atau dapat dikatakan saklar dalam kondisi terbuka.
b. Normally open (NO) : saklar terhubung dengan kontak ini saat relay aktif atau dapat dikatakan saklar dalam kondisi tertutup.
Gambar 2.19 Relay
Berdasarkan pada prinsip dasar cara kerjanya, relay dapat bekerja karena adanya medan magnet yang digunakan untuk menggerakkan saklar. Saat kumparan diberikan tegangan sebesar tegangan kerja relay maka akan timbul medan magnet pada kumparan karena adanya arus yang mengalir pada lilitan kawat. Kumparan yang bersifat sebagai elektromagnet ini kemudian akan menarik saklar dari kontak NC ke kontak NO. Jika tegangan pada kumparan dimatikan maka medan magnet pada kumparan akan hilang sehingga pegas akan menarik saklar ke kontak NC.