BAB V
TRANSFORMASI-Z
A. Pengertian Transformasi-z
Transformasi-z adalah suatu transformasi yang berguna untuk menyelesaikan persamaan beda (difference equation). Hal ini serupa dengan kegunaan transformasi Laplace, tetapi berlaku untuk sinyal dan sistem waktu diskrit. Transformasi-z dari suatu sinyal x(n) didefinisikan sebagai:
n n z ) n ( x ) z ( X (5.1)di mana z adalah suatu variabel bilangan komplek, yaitu z = re j .
Gambar 5.1. Bidang kompleks
Transformasi-z adalah suatu deret tak hingga, sehingga mungkin saja divergen untuk beberapa nilai z. Oleh karena itu, transformasi-z hanya didefinisikan untuk suatu daerah yang hasil transformasinya adalah terhingga. Daerah tersebut diberi nama
daerah konvergen (Region of Convergence). Secara umum, Region
Of Convergence (ROC) dari transformasi-z berbentuk :
R1 < |z| < R2, dimana |z| = r. (5.2)
dengan batas R1 dan R2 adalah tergantung pada sinyal yang
ditransformasikan. Contoh 5.1:
Cari Transformasi-Z dari sinyal-sinyal berikut: a. x1(n) = {1, 2, 3, 5, 7, 0, 1}
Im(z)
Re(z) r
b. x2(n) = {0, 0, 1, 2, 5, 0, 1} c. x3(n) = an u(n) = {1, a, a2, a3, … } Jawab: a. X1(z) = 1 + 2z-1 + 3z-2 + 5z-3 + 7z-4 + z-6 ; ROC: z ≠ 0 b. X2(z) = z-2 + 2z-3 + 5z-4 + z-6; ROC: z ≠ 0 c. X3(z) = 1 + az -1 + a2z -2 + a3z -3 + … =
0 n n n z a =
0 n n 1 azjika az –1 = A, maka persamaan di atas dapat ditulis sebagai: X3(z) = 1 + A + A2 + A3 + ...
Dan jika ruas kanan dan ruas kiri dari persamaan di atas dikalikan dengan (1 – A), maka akan dihasilkan:
X3(z) [1 – A] = [1 + A + A2 + A3 + ...][1 – A]
= [1 + A + A2 + A3 + ...] – [A + A2 + A3 + ...] ≈ 1
atau dapat ditulis: X3(z) =
A 1
1
Persamaan di atas akan konvergen jika A < 1 atau |az–1| < 1 atau |z| > |a|, dengan kata lain, ROC adalah bagian luar lingkaran yang mempunyai jari-jari |a|.
Gambar 5.2. Ilustrasi ROC dari Contoh 5.1.c
ROC
Re(z) Im(z)
B. Sifat-sifat Transformasi-z
Transformasi-z sangat berguna untuk mempelajari sinyal dan sistem waktu diskrit. Transformasi ini mempunyai beberapa sifat penting:
1. Linier
Jika Z[x1(n)] = X1(z) dan Z[x2(n)] = X2(z), maka
Z[a1 x1(n) + a2 x2(n)] = a1 X1(z) + a2 X2(z)
Keterangan : Z[x1(n)] artinya transformasi Z dari x1(n)
Contoh 5.2:
Cari transformasi-z dari x(n) = u(n) + 0,9n u(n) Jawab:
transformasi-z dari u(n) = z/(z – 1) transformasi-z dari 0,9n u(n) = z/(z – 0,9) maka transformasi-z dari u(n) + 0,9n u(n)
) 9 , 0 z )( 1 z ( z 9 , 1 z 2 ) 9 , 0 z )( 1 z ( ) 1 z ( z 9 , 0 z z 9 , 0 z z 1 z z 2 2. Penggeseran waktu Jika Z[x(n)] = X(z), maka: Z[x(n–1)] = z -1X(z) + x(–1) Z[x(n–2)] = z -2X(z) + x(–2) + z -1x(–1) Z[x(n–k)] = z -kX(z) + x(–k) + z -1x(–k+1) + ... + z –k+1x(–1) Z[x(n+1)] = zX(z) – z x(0) Z[x(n+2)] = z 2 X(z) – z2 x(0) – z x(1) Z[x(n+k)] = z k X(z) – zk x(0) – zk-1 x(1) – ... – z x(k–1) Contoh 5.3:Cari transformasi-z dari x(n) = u(n + 2) Jawab: Z[u(n+2)] = z 2 X(z) – z2 x(0) – z x(1) 1 z 1 z z 1 z 1 z z 1 z z z z z 1 z z z2 2 2 2 1 z z 1 z z z z z z3 3 2 2
3. Perkalian dengan waktu Jika Z[x(n)] = X(z), maka Z[n x(n)] =
X(z)
dz d z Contoh 5.4:Tentukan transformasi-z dari x(n) = n.u(n) Jawab: Z[n.u(n)] =
X(z)
dz d z =
2 1 z ) 1 ( z 1 1 z z 1 z z dz d z =
2
2 1 z z 1 z 1 z 4. Pembalikan waktu Jika Z[x(n)] = X(z), maka Z[x(–n)] = X(1/z) Contoh 5.5:Cari transformasi-z dari x(n) = u(–n) Jawab: Z[u(–n)] = z 1 1 1 z z 1 1 5. Perkalian dengan an
Jika Z[x(n)] = X(z), maka Z[an x(n)] = X(z/a) Contoh 5.6:
Tentukan transformasi-z dari x(n) = 0,8n u(n) Jawab: Z[0,8n u(n)] = X(z/0,8) = 8 , 0 z z 1 8 , 0 / z 8 , 0 / z 6. Teorema nilai awal
Jika Z[x(n)] = X(z), maka x(0) = limX
z zContoh 5.7:
Tentukan nilai awal x(0) jika
9 , 0 z z ) z ( X
Jawab: x(0) = limX
z z = z 0,9 z lim z = 17. Teorema nilai akhir
Jika Z[x(n)] = X(z), maka limx(n) lim
z 1
X(z) 1z
n
Contoh 5.8:
Tentukan nilai akhir x(∞) jika
9 , 0 z z ) z ( X Jawab:
z 1
X(z) lim ) n ( x lim 1 z n =
z 0,9 z 1 z lim 1 z = 0Tabel 5.1. Sifat-sifat transformasi-z
Sifat Sinyal diskrit Transformasi-z ROC
Notasi x(n) x1(n) x2(n) X(z) X1(z) X2(z) ROC; r2 < |z| < r1 ROC1 ROC2 Linieritas ax1(n) + bx2(n) aX1(z) + bX2(z); untuk seluruh a dan b Paling sedikit interseksi antara ROC1 dan ROC2
Penggeseran waktu x(n – M) z – M X(z) X(z) kecuali z = 0 jika M>0, dan z = , jika M<0 Pembalikan waktu x(– n) X(z – 1) (1/r1) < |z| < (1/r2)
Konvolusi x(n) * h(n) X(z) H(z) Paling sedikit interseksi antara ROC1 dan ROC2
Perkalian dengan n nx(n)
X(z)
dz d z r1 < |z| < r2 Perkalian dengan anan x(n) X(z/a) |a|r2 < |z| < |a|r1
Teorema nilai awal x(0) limX
z z Teorema nilai akhir limnx
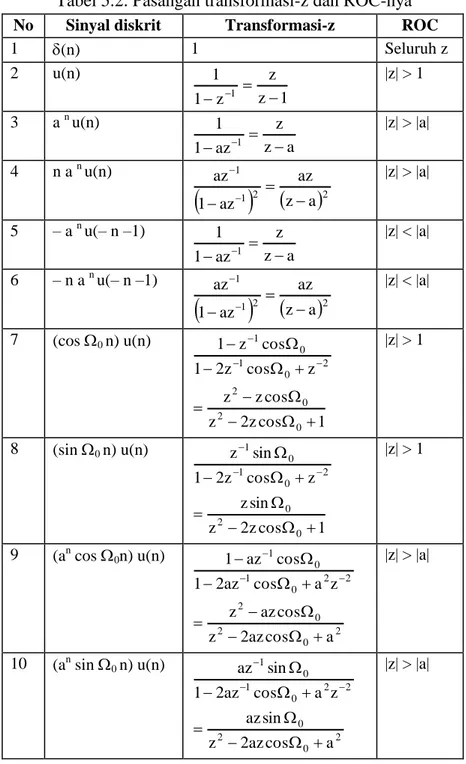
n [(z–1) X(x)]z = -1Tabel 5.2. Pasangan transformasi-z dan ROC-nya
No Sinyal diskrit Transformasi-z ROC
1 (n) 1 Seluruh z 2 u(n) 1 z z z 1 1 1 |z| > 1 3 a n u(n) a z z az 1 1 1 |z| > |a| 4 n a n u(n)
1
2
2 1 a z az az 1 az |z| > |a| 5 – a n u(– n –1) a z z az 1 1 1 |z| < |a| 6 – n a n u(– n –1)
1
2
2 1 a z az az 1 az |z| < |a| 7 (cos 0 n) u(n) 1 cos z 2 z cos z z z cos z 2 1 cos z 1 0 2 0 2 2 0 1 0 1 |z| > 1 8 (sin 0 n) u(n) 1 cos z 2 z sin z z cos z 2 1 sin z 0 2 0 2 0 1 0 1 |z| > 1 9 (an cos 0n) u(n) 2 0 2 0 2 2 2 0 1 0 1 a cos az 2 z cos az z z a cos az 2 1 cos az 1 |z| > |a| 10 (an sin 0 n) u(n) 2 0 2 0 2 2 0 1 0 1 a cos az 2 z sin az z a cos az 2 1 sin az |z| > |a|Dari tabel terlihat bahwa transformasi-z tidaklah unik untuk suatu sinyal, tetapi yang membedakan adalah ROC-nya. Misalnya untuk
sinyal nomor 3 dan sinyal nomor 5, transformasi-z dari keduanya adalah sama, tetapi ROC-nya berbeda. Hal ini akan merepotkan untuk keperluan praktis, sehingga biasanya untuk keperluan ini dipakai transformasi-z satu sisi.
C. Transformasi-z Satu Sisi
Transformasi-z satu sisi dari suatu sinyal x(n) didefinisikan sebagai:
0 n n z ) n ( x ) z ( X (5.3)Transformasi ini mempunyai beberapa karakteristik:
1. Tidak berisi informasi tentang sinyal x(n) untuk waktu
bernilai negatif (n < 0)
2. Bersifat unik hanya untuk sinyal kausal, karena hanya sinyal-sinyal ini yang bernilai nol untuk n < 0
3. Transformasi-z satu sisi dari x(n) identik dengan
transformasi-z dua sisi dari sinyal x(n)u(n). Karena x(n)u(n) adalah kausal, ROC-nya, juga ROC transformasi satu sisi-nya, selalu merupakan bagian luar suatu lingkaran. Jadi, bila kita membahas transformasi-z satu sisi, kita tidak perlu membahas ROC-nya.
D. Transformasi-Z Balik (Invers Z-Transform)
Invers Transformasi-z dinyatakan secara formal oleh:
C 1 n dz z z X j 2 1 ) n ( x (5.4)dengan integral adalah integral kontur melalui lintasan tertutup C yang terdapat pada titik asal dan terletak dalam daerah konvergensi X(z). Untuk sederhananya, C dapat diambil sebagai lingkaran dalam ROC X(z) pada bidang z.
Ada tiga metode yang sering digunakan untuk menghitung invers transformasi-z dalam praktek:
1. Menghitung langsung integral kontur
2. Ekspansi dalam deret pangkat, dengan variabel z dan z–1
3. Ekspansi pecahan parsial dan melihat tabel pasangan
Dengan beberapa pertimbangan, buku ini hanya akan membahas metode nomor 3 saja.
Invers Transformasi-z dengan Ekspansi Pecahan Parsial
Perhatikan X(z) yang diberikan oleh persamaan:
n m dengan ; a z a z a z b z b z b z b ) z ( X n 1 n 1 n 1 n m 1 m 1 m 1 m 0
Untuk mengekspansi X(z) menjadi pecahan parsial, pertama kita memfaktorkan penyebut dan menemukan pole-pole dari X(z):
z p
z p
z p
b z b z b z b ) z ( X n 2 1 m 1 m 1 m 1 m 0 (5.4) Kemudian kita mengekspansi X(z)/z menjadi pecahan parsial,sehingga setiap suku mudah disesuaikan dengan tabel
transformasi-z.
1. Ketika X(z) terdiri dari pole-pole riil dan tak berulang
n n 2 2 1 1 p z a p z a p z a z ) z ( X (5.5)
Koefisien ai untuk pole riil tunggal ditentukan oleh persamaan:
i p z i i z ) z ( X p z a (5.6) Contoh 5.9:Tentukan invers transformasi-z dari:
1 z : ROC jika ; z 5 , 0 z 5 , 1 1 1 ) z ( X 1 2 Jawab:
Ekspansi pecahan parsial dari X(z) menghasilkan: 5 , 0 p , 1 p didapat ; z 5 , 0 1 1 z 1 2 ) z ( X 1 1 1 2
Bila ROC adalah |z| > 1, berarti sinyal x(n) adalah sinyal kausal, sehingga:
x(n) = 2u(n) – (0,5)n u(n) = (2 – (0,5)n) u(n)
b. Ketika X(z) terdiri pole-pole pasangan komplek
Jika p1 dan p2 adalah pole-pole pasangan bilangan komplek, dan
pole lainnya adalah pole riil dan tak berulang, maka ekspansi berikut dapat dipakai:
n n 2 1 2 1 p z a p z p z z z ) z ( X (5.7) Koefisien pole-pole riil dicari terlebih dahulu, dengan cara yangsama dengan pembahasan sebelumnya, kemudian nilai-nilai dari 1
dan 2 ditemukan dengan rumus:
1z2
zp3
zpn
an
zp1
zp2
B
zdimana B(z) adalah bagian pembilang dari X(z)/z. Kemudian koefisien z pangkat tertentu pada kedua ruas disamakan, sehingga akan didapat nilai 1 dan 2.
Contoh 5.10:
Tentukan invers transformasi z dari:
z 1
z z 1
z z 1 z 2 z 2 z z z ) z ( X 2 2 2 3 2 Jawab:Ekspansi pecahan parsial dari X(z)/z menghasilkan:
z z 1
z 1 z a 1 z z 1 z 1 z z ) z ( X 2 2 1 2 nilai a dicari dengan:
2 1 z z 1 z 1 z z z X a 1 z 2 1 z sehingga diperoleh persamaan:
z z 1
z 1 z 2 1 z z 1 z 1 z 2 2 1 2 kemudian dicari nilai 1 dan 2 dengan menyamakan penyebut dari
2(z2 – z + 1) + (z – 1)( 1z + 2) = z + 1 2z2 – 2z + 2 + (1z2 – 1z + 2z – 2) = z + 1 (2 + 1)z2 + (-2 – 1 + 2)z + (2 – 2)z0 = (0)z2 + (1)z + (1)z0 sehingga : z2 : 2 + 1 = 0 z1 : -2 – 1 + 2 = 1 z0 : 2 – 2 = 1
akhirnya didapatkan 1 = –2 dan 2 = 1, sehingga:
z z 1
1 z 2 1 z 2 z ) z ( X 2 atau
z z 1
z 5 , 0 z 2 1 z z 2 ) z ( X 2 2 mengingat pasangan transformasi-z (lihat Tabel 5.2) :
Z
[(an cos 0n) u(n)] = 20 2 0 2 a cos az 2 z cos az z
maka a = 1, cos 0 = 0,5, dan diperoleh 0 = /3, sehingga
didapat:
x(n) = 2.u(n) – 2 u(n) cos (/3)n
Cara lain untuk mencari invers transformasi-z yang mempunyai pole kompleks adalah menggunakan pola pencarian invers untuk pole riil dan tak berulang. Hanya saja cara ini harus menggunakan bilangan komplek. Berikut ini akan diperlihatkan metode tersebut untuk persoalan yang sama seperti pada Contoh 5.10:
z 0,5 j0,87 a 87 , 0 j 5 , 0 z a 1 z a 1 z z 1 z 1 z z ) z ( X 1 2 3 2
2 1 z z 1 z 1 z z z X a 1 z 2 1 z 1 1 ) 732 , 1 j )( 87 , 0 j 5 , 0 ( 87 , 0 j 5 , 1 ) 87 , 0 j 5 , 0 z )( 1 z ( 1 z a 87 , 0 j 5 , 0 z 2 1 ) 732 , 1 j )( 87 , 0 j 5 , 0 ( 87 , 0 j 5 , 1 ) 87 , 0 j 5 , 0 z )( 1 z ( 1 z a 87 , 0 j 5 , 0 z 3
Nilai-nilai koefisien tersebut dimasukkan sehingga didapat: 87 , 0 j 5 , 0 z 1 87 , 0 j 5 , 0 z 1 1 z 2 z ) z ( X 87 , 0 j 5 , 0 z z 87 , 0 j 5 , 0 z z 1 z z 2 ) z ( X 87 , 0 j 5 , 0 z z 87 , 0 j 5 , 0 z z 1 z z 2 ) z ( X
1 z z ) 87 , 0 j 5 , 0 z ( z 87 , 0 j 5 , 0 z z 1 z z 2 ) z ( X 2 1 z z z 5 , 0 z 2 1 z z 2 1 z z z z 2 1 z z 2 ) z ( X 2 2 2 2mengingat pasangan transformasi-z (lihat Tabel 5.2) :
Z
[(an cos 0n) u(n)] = 20 2 0 2 a cos az 2 z cos az z
maka a = 1, cos 0 = 0,5, dan diperoleh 0 = /3, sehingga
didapat:
x(n) = 2.u(n) – 2 u(n) cos (/3)n
c. Ketika X(z) terdiri dari pole-pole riil dan berulang
Jika X(z)/z memiliki pole-pole berulang pada p1 dengan pangkat r,
maka penyebut dapat ditulis sebagai:
(z + p1)r (z + pr +1)(z + pr +2)…(z + pn)
Ekspansi pecahan parsial dari X(z)/z ditulis sebagai:
n n 2 r 2 r 1 r 1 r 1 1 1 r 1 1 r r 1 r p z a p z a p z a p z b p z b p z b z ) z ( X (5.8) Nilai-nilai konstanta ar+1, ar+2, …, an dicari dengan pola yang samadengan sebelumnya, sedangkan br, br-1, …, b1 dicari dengan
1 1 1 1 p z r 1 1 r 1 r 1 p z r 1 j j j r p z r 1 1 r p z r 1 r p z z ) z ( X dz d ! 1 r 1 b p z z ) z ( X dz d ! j 1 b p z z ) z ( X dz d b p z z ) z ( X b Contoh 5.11:Tentukan invers transformasi-z dari:
1 z z z z z 2 z 6 ) z ( X 3 2 2 3 Jawab:
Pemfaktoran dari X(z)/z menghasilkan:
z 1
z 1
1 z 2 z 6 1 z z z 1 z 2 z 6 z ) z ( X 2 2 2 3 2 dan didapat pole-pole: p1 = 1, p2 = 1 dan p3 = –1, sehingga
ekspansi pecahan parsial yang dihasilkan adalah:
z 1 a 1 z b 1 z b z ) z ( X 1 2 2 kemudian dicari nilai masing-masing konstanta:
3,5 2 1 2 6 z z X 1 z b 1 z 2 2
5,25 4 7 14 2 z z X 1 z dz d b 1 z 2 1
0,75 4 1 2 6 z z X 1 z a 1 z
z 1 75 , 0 1 z 25 , 5 1 z 5 , 3 z ) z ( X 2
z 1 z 75 , 0 1 z z 25 , 5 1 z z 5 , 3 ) z ( X 2 dan dengan menggunakan tabel pasangan transformasi-z diperoleh invers transformasi-z:
x(n) = 3,5n u(n) + 5,25 u(n) + 0,75(–1)n u(n)
E. Penyelesaian Persamaan Beda dengan Transformasi-z
Persamaan beda dapat diselesaikan secara mudah dengan menggunakan suatu komputer digital. Tetapi, ekspresi bentuk tertutup untuk x(n) tidak dapat diperoleh dari penyelesaian komputer, kecuali untuk kasus khusus. Transformasi-z dapat mengatasi masalah ini.
Perhatikan sistem waktu diskrit yang dinyatakan dalam persamaan beda berikut:
y(n) + a1 y(n–1) + … + an y(n–k) =
b0 x(n) + b1 x(n–1) + … + bn x(n–k)
dimana y(n) dan x(n) berturut-turut adalah output dan input sistem. Bila didefinisikan Z[x(n)] = X(z), maka x(n+1), x(n+2), …, dan x(n–1), x(n–2), … dapat dinyatakan dalam bentuk: X(z) dan kondisi inisialnya, seperti terlihat pada tabel berikut:
Tabel 5.3. Pasangan transformasi-z dan transformasi-z satu sisi
Fungsi diskrit Transformasi-z satu sisi Transformasi-z
x(n + 2) z2 X(z) – z2 x(0) – zx(1) z2 X(z) – z2 x(0) – zx(1) x(n + 1) zX(z) – zx(0) zX(z) – zx(0) x(n) X(z) X(z) x(n – 1) z –1 X(z) z –1 X(z) + x(–1) x(n – 2) z –2 X(z) z –2 X(z) + x(–2) + z -1x(–1) Contoh 5.12:
Tentukan respon sistem berikut untuk input x(n) adalah unit step: 0,25 y(n) = – y(n + 2) + y(n +1) + x(n + 2)
dengan y(0) = 1, y(1) = 2 Jawab:
Dengan mengambil tranformasi-z satu sisi, kita memperoleh:
+ z2 X(z) – z2 x(0) – zx(1) = – z2 Y(z) + z2 + 2z + zY(z) – z + z2 X(z) – z2 – z Y(z) [0,25 – z + z2] = z2 X(z) = z3 /(z – 1)
z 0,5
b 5 , 0 z b 1 z a 5 , 0 z 1 z z 25 , 0 z z 1 1 z z z ) z ( Y 1 2 2 2 2 2 2 Nilai koefisien a, b2, dan b1 dicari dengan teknik ekspansi pecahan
parsial yang telah dibahas sebelumnya.
Koefisien a untuk pole riil tunggal ditentukan oleh persamaan:
2 1 z p z 1 5 , 0 1 1 z ) z ( X 1 z z ) z ( X p z a 1 = 4 kemudian dicari nilai b2 dan b1 :
0,5 5 , 0 25 , 0 1 z z z z X 5 , 0 z b 5 , 0 z 2 5 , 0 z 2 2
5 , 0 z 2 5 , 0 z 2 1 1 z z dz d z z X 5 , 0 z dz d b
0,25 3 25 , 0 5 , 0 1 z z z 2 1 z 5 , 0 z 2 2 Ketika nilai-nilai a, b2 dan b1 dimasukkan kembali, menjadi:
z 0,5
3 5 , 0 z 5 , 0 1 z 4 5 , 0 z 1 z z z ) z ( Y 2 2 2
z 0,5
z 3 5 , 0 z z 5 , 0 1 z z 4 5 , 0 z z 3 5 , 0 z z 5 , 0 1 z z 4 z Y 2 2 dengan melihat tabel pasangan transformasi-z, didapatkan: y(n) = 4 u(n) – n (0,5)n u(n) + 3(0,5)n u(n)
F. Soal-soal
1. Cari transformasi-z dari y(n) = n.an-1, untuk n 0.
2. Hitung transformasi-z balik (invers transformasi-z) dari :
z 2
z 1
z z 2 z X 2 3 Gunakan metode ekspansi pecahan parsial
3. Cari penyelesaian persamaan beda (difference equation) dari:
y(n + 2) – 1,3y(n + 1) + 0,4 y(n) = x(n) dimana y(0) = y(1) = 0, dan x(n) = u(n).