6
BAB II
PRINSIP DASAR SISTEM MESIN CAPPING
2.1. Sistem mesin capping
Mesin capping diperlukan untuk pengemasan primer pada produksi obat sirup. Otomatisasi pada mesin ini dibuat untuk mengurangi human error yang diakibatkan karena kesalahan operator mesin, sehingga dapat mencapai hasil produksi yang konsisten. Mesin akan diotomatiskan dengan penambahan conveyor sebagai jalur botol menuju mesin, penambahan starwheel yang berguna untuk menggeser botol dari
conveyor menuju crimping head. Serta penambahan user interface sebagai penampil
menu.
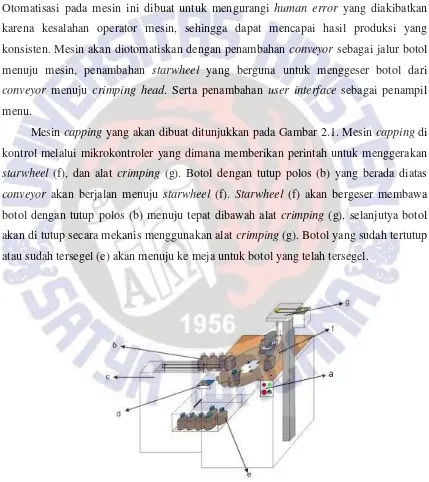
Mesin capping yang akan dibuat ditunjukkan pada Gambar 2.1. Mesin capping di kontrol melalui mikrokontroler yang dimana memberikan perintah untuk menggerakan
starwheel (f), dan alat crimping (g). Botol dengan tutup polos (b) yang berada diatas
conveyor akan berjalan menuju starwheel (f). Starwheel (f) akan bergeser membawa
botol dengan tutup polos (b) menuju tepat dibawah alat crimping (g), selanjutya botol akan di tutup secara mekanis menggunakan alat crimping (g). Botol yang sudah tertutup atau sudah tersegel (e) akan menuju ke meja untuk botol yang telah tersegel.
7 Keterangan:
a : Tombol on/off, emergency switch. b : botol dengan tutup polos.
c : conveyor.
d : control panel (push button switch keypad dan LCD).
e : botol dengan tutup terulir. f : starwheel.
g : alat crimping.
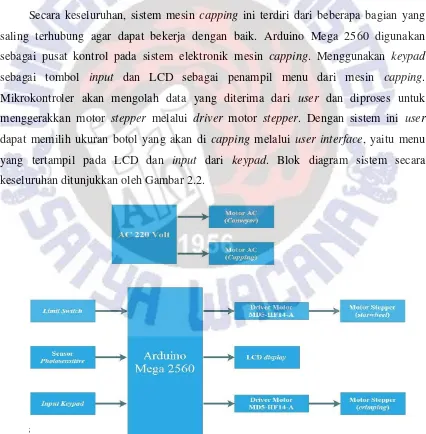
2.2. Blok Diagram Sistem
8 Penjelasan blok diagram:
1. SUMBER
Menggunakan tegangan AC 220 V sebagai sumber motor AC pada
conveyor, sumber motor AC pada crimping head, dan sebagai sumber driver
motor stepper. Sedangkan catu daya DC menggunakan adaptor 5V 1A sebagai sumber daya dari Arduino Mega 2560.
2. KONTROL
Arduino Mega 2560 digunakan sebagai kontrol sistem elektronik pada mesin capping, yang digunakan untuk mengontrol semua input dan output sistem.
3. INPUT
Menggunakan 6 buah push button switch sebagai keypadinput. Limit switch sebagai penanda ketinggian capping head saat naik pada kondisi awal, sensor photosensitive sebagai pengkoreksi awal letak starwheel.
4. OUTPUT
Menggunakan LCD untuk menampilkan menu pilihan botol, sedangkan
driver untuk mengontrol gerak pada motor stepper.
2.3. Prinsip Kerja Sistem
1. Hidupkan Alat dengan menggeser switch pada mesin.
2. Pada menu awal LCD akan muncul tulisan 1.Ukuran Botol dan
9