MODEL PINTU AIR BERBASIS
MIKROKONTROLER AT89S51 DAN PC
TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun Oleh :
BRIATMA KURNIA PUTRA PRISTIWADI NIM : 025114006
PROGRAM STUDI TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA YOGYAKARTA
PENGATUR MODEL PINTU AIR BERBASIS
MIKROKONTROLER AT89S51 DAN PC
TUGAS AKHIR
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro
disusun oleh :
BRIATMA KURNIA PUTRA PRISTIWADI
NIM : 025114006
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
GATE MODEL REGULATOR BASED ON
PC AND AT89S51 MICROCONTROLLER
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
to Obtain the SARJANA TEKNIK Degree
in Electrical Engineering
by :
BRIATMA KURNIA PUTRA PRISTIWADI
STUDENT NUMBER : 025114006
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
G
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 23 Juni 2007
Briatma Kurnia Putra Pristiwadi
Jenius adalah 1 % inspirasi dan 99 % keringat. Tidak ada yang
dapat menggantikan kerja keras. Keberuntungan adalah sesuatu
yang terjadi ketika kesempatan bertemu dengan kesiapan
.
Thomas A. Edison
Yang terpenting dalam Olimpiade bukanlah kemenangan, tetapi
keikutsertaan ...
Baron Pierre De Coubertin
Kupersembahkan Karya ini : Unt uk Tuhan Yesus Krist us Unt uk Ayah dan Ibuku t ercint a Unt uk Kakak dan adikku t er sayang Unt uk Segenap Kel uar gaku
Unt uk Semua t eman dan sahabat ku
Terimakasi h at as segal a dukungan, kasi h dan ci nt a yang sel al u di ber ikan pada penul is.
Telemetri ketinggian air memberikan kemudahan dalam mengukur ketinggian air secara jarak jauh. Telemetri ketinggian air dapat diterapkan dalam sungai-sungai, sehingga pemantauan ketinggian air sungai dapat terus dilakukan dalam tempat yang aman jika terjadi kondisi alam yang tidak memungkinkan untuk melakukan pengamatan, misalkan pada malam hari ataupun sewaktu terjadi hujan deras. Dalam perancangan ini Telemetri ketinggian air akan digunakan untuk mengatur model pintu air, sehingga nantinya dalam mengatur pintu air tidak lagi di lakukan secara manual, PC akan secara otomatis mengontrol model pintui air sehingga di dapat ketinggian air sungai sesuai dengan yang diinginkan oleh user.
Implementasi perancangan peralatan ini menggunakan potensiometer sebagai sensor ketinggian air, ADC untuk mengubah data analog menjadi data digital, mikrokontroler sebagai pengubah data pararel menjadi data serial dan sebagai pengatur motor DC, modem FSK sebagai modulator data analog, pemancar dan penerima FM sebagai alat transmisi, MAX 232 sebagai pengubah level tegangan, PC sebagai pengontrol dan memonitor ketinggian air. Hasil pengukuran ketinggian air pertama-tama dimodulasi secara FSK, kemudian modulasi dilanjutkan secara FM. Pada penerima hasil pengukuran akan ditampilkan pada PC, data yang ditampilkan pada PC di olah dan dibandingkan dengan data ketinggian yang dimasukkan oleh user. Data hasil perbandingan digunakan sebagai acuan untuk mengatur ketinggian air sungai pada model pintu air.,
Pada tugas akhir ini, perangkat keras dan perangkat lunak Telemetri Ketinggian Air Sebagai Pengatur Model Pintu Air Berbasis Mikrokontroler AT89S51 dan PC berhasil dibuat. Progam dapat menampilkan hasil pengukuran ketinggian air sungai, dapat menggatur model pintu air dan dapat memberi peringatan bahwa sungai meluap.
Kata kunci : ketinggian air, FSK, Visual Basic
Water level telemetry provides simple alternative to measure water level on long distance. Water level telemetry can be used on the rivers, in order to observe water level continualy at the safety place, wheatear is impossible realm condition to do it, for examples in the night or the swift raining. In this program, water level telemetry will be used to regulate the water gate model, so it did not manually anymore. PC will be control the water gate model automatically until the water level on the river will be obtained appropriate with the user want to get.
This implementation uses potentiometer as a water level sensor, ADC as an analogous to digital data converter, microcontroller as a data pararel to serial converter and DC motor regulator, FSK modem as a analogous modulator, FM transceiver as a transmitter device, MAX 232 as a voltage level converter , PC as a water level monitor and controller. At transmitter side, the result of water level measurement will be modulated to FSK, and transmitted to FM. At receiver side the result of measuring will be proceed and compared with the water level data that has been inputted by user.The result comparation data will be used as a reference to regulate the river water level on the water gate model
On this final task, the hardware and software of the water level telemetry as a water gate model regulator based on PC and Microcontroller AT89S51 could be made successfully. The program can display the result of river water level measurement, regulate the water gate model and provide the warning that the water was over flow
Key words : water level, FSK, Visual Basic
Puji syukur penulis panjatkan kepada Allah Bapa disurga, yang telah
memberikan kasih karunia, anugerah, dan berkat-Nya, sehingga penulis dapat
menyelesaikan penulisan tugas akhir dengan baik.
Penulis menyadari bahwa dalam penulisan tugas akhir ini, penilis
mendapatkan banyak bantuan dan dorongan dari berbagai pihak. Oleh karena itu,
pada kesempatan ini perkenankanlah dengan segala kerendahan hati dan penuh
hormat, penulis mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC Selaku Dekan Fakultas
Teknik Universitas Sanata Dharma Yogyakarta.
2. Bapak A. Bayu Primawan, S.T., M.Eng selaku Ketua Jurusan Teknik
Elektro Universitas Sanata Dharma Yogyakarta dan selaku pembimbing II
yang membimbing dan mengarahkan dalam penyusunan tugas akhir ini.
3. Bapak Martanto, S.T, M.T selaku pembimbing I atas segala pemikiran
dalam membimbing dan mengarahkan penulis dari awal hingga akhir.
4. Seluruh dosen di Fakultas Teknik Elektro yang tidak dapat di sebutkan
satu persatu, yang telah mendidik penulis untuk mengetahui lebih dalam
tentang Teknik Elektronika.
5. Seluruh Staf Perpustakaan Universitas Sanata Dharma yang sudah
memberikan layanan dan bantuan selama proses pencarian referensi.
6. Kedua orang tua penulis yang telah memberikan doa, dorongan moril
maupun material, kasih dan kesabaran yang tak pernah putus sehingga
penulis dapat menyelesaikan tugas akhir ini.
ke-Betean ku selama penyusunan tugas akhir ini.
8. Teman-teman teknik Elekro yang sudah membantu : Nango, Hugo, Antin,
Alex, BE”JO”lin (makasih buat pinjaman kabelnya), Ratna, Dwi, Wiryadi,
Eric “Decoy” (thank you buat laptop Vaionya).
9. Teman-teman di “ROSO KANGEN.EO” : Rinto, Gogon, Mbah Oko,
Kecer, Mendrik yang telah membantu dalam memotong aklirik dan
membuat maket pintu airnya, Kuemprut yang membantu beli akrilik ampe
tangan pegel. Mas Bambang makasih atas grendonya, Mas Nata makasih
atas cara pengeleman akliriknya dan Pak Ketua Bp Supangat makasih atas
pinjaman pompa airnya.
10.Rekan-rekan di : NANDI Elektronik and Comp, QUANTUM Elektronik,
Mas Pri di SONY Group Elektronik, CHRISTAMAS Elektronik yang
telah memberikan saran-saran dan bantuan dalam penyusunan tugas akhir
ini. Bengkel bubut SUMBER WIDODO yang telah membuatkan gerigi,
dan mur baut model pintu air.
11.Teman senasib dan sepenanggungan : Mas Teguh tea kapan selesai skripsi,
Heriyanto S.E buat hari-hari yang indah dulu, Yanto ,Aan ,Ali makasih
karna telah mengajari kerasnya hidup. Mbak Getik, Mas Supri dan Mbak
Conie, Putri Imut makasih atas tumpangan tempat buat tidur selama belum
dapat kos. Sandi Man. My Best Friend Bayu S.H makasih telah menjadi
sobatku dari SMU hingga sekarang.
12.Teman-teman kost T-KIP : Ari (Gendut) email mu saru, Dedik kapan
bimbingan Rohani lagi, Agung Bawono, S.T fleksibel aja Mo, Dody
dan Mikronya
13.Marcopolo Team : Bule, Gepenk, Me2t, Plenthong, Koten, Lambezz,
Andex, Ahox yang selalu menjadi sumber inspirasiku dan sumber
senyumku. Jangan selamanya jadi “BATMAN”
14.Laboran teknik elektro : mas Suryono makasih udah ngajari ngetrim
pemancar , mas Mardi buat ijin titip barang-barang, mas Broto yang udah
mau nungguin serta jadi teman sewaktu memperbaiki alat dan mengambil
data, dan mas Yusuf yang udah mau membuka pintu dan menunggu
selama mas Broto cuti.
15.Anak-anak seni UNY : Sintha, Pi2T, Vanti, Rika yang selalu memberikan
senyum di waktu aku BT banget.
16.Anak-anak Tuhan di GKJ Sabda Winedhar Surakarta yang dah jadi teman
dalam satu pelayanan. Makasih atas dukungannya.
17.Regenerasi Motorku : Grand 94, Supra 00, dan Vega R 05 yang selalu
setia menemani perjalanan SOLO – YOGYA, yang rela kehujanan dan
kepanasan waktu cari komponen. Jangan cepet-cepet jadi barang
rongsokan ya ….????????.
18. Kamar kecil 3 x 2.5 bertuliskan “RUANG TEKNIK”, di tempat ini
kutulis semua angan-angan dan harapan hidupku.
19.Teman-teman mahasiswa jurusan Teknik Elekro dan semua pihak yang
tidak dapat disebutkan satu persatu atas setiap bantuannya.
penulisan tugas akhir ini. Oleh karena itu segala kritik dan saran yang bersifat
membangun sangat penulis harapkan.
Akhir kata penulis berharap agar skripsi ini dapat bermanfaat bagi
penulis maupun pembaca semuanya.
Yogyakarta, 26 Juli 2007
Penulis
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA... v
MOTO DAN PERSEMBAHAN... vi
INTISARI... vii
ABSTRACT
... viiiKATA PENGANTAR
... ixDAFTAR ISI
... xiiiDAFTAR TABEL... xviii
DAFTAR GAMBAR ... xix
DAFTAR LAMPIRAN... xxiii
BAB I. PENDAHULUAN... 1
1.1 Judul……… 1
1.2 Latar Belakang ... 1
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ... 3
1.5 Pembatasan Masalah... 3
1.6 Metedologi Penelitian ... 3
1.7 Sistematika Penulisan ... 4
2.1 Penguat Inverting ... 6
2.2 Penjumlah Tegangan……….. 7
2.3 Buffer Tegangan……….. 8
2.4 Rangkaian Pembagi Tegangan………... 8
2.5 Pengubah Analog ke Digital (ADC)………. . 8
2.6 Modem FSK………... 10
2.6.1 Modulator FSK XR-2206……….. 11
2.6.2 Demodulator FSK XR-2211……… . 12
2.7 Mikrokontroler AT89S51……… 14
2.7.1 Komunikasi Serial... 15
2.7.2 Reset... 17
2.8 Pengubah Level TTL ke Level Serial ... 17
2.9 Konfigurasi Port Serial ... 18
2.10 Motor DC ... 20
BAB III PERANCANGAN ... 22
3.1 Sensor Ketinggian Air ... 23
3.2 Potensio Multi Turn... 24
3.3 Pengkondisi Sinyal ... 25
3.3.1 Pembagi Tegangan ... 27
3.3.2 Buffer Tegangan Referensi ... 28
3.3.3 Penguat Inverting Vsensor ... 28
3.3.4 Rangkaian Penjumlah Tegangan... 29
3.4 Pengubah Analog ke Digital (ADC)... 30
8 bit Menjadi Data Serial... 31
3.6 Pemprograman Mikrokontroler Pengubah Data Pararel Menjadi Serial 33 3.6.1 Rutin Baca ADC ... 34
3.6.2 Kirim Data... 35
3.7 Modulator FSK... 35
3.8 Pemancar dan Penerima FM... 37
3.10 Demodulator FSK... 37
3.11 Mikrokontroler AT89S51 Sebagai Pengatur Arah Putaran Motor DC . 40 3.12 Pengubah Level Tegangan TTL Menjadi RS 232 ... 42
3.13 Pemprograman Visual Basic ... 43
3.13.1 Form Utama ... 44
3.13.2 Rutin Olah Data... 47
3.13.3 Form Pengaturan Manual... 48
3.13.4 Atur Ketinggian... 50
3.13.5 Menu Bantuan ... 50
3.14 Pembalik Putaran Motor DC ... 52
3.15 Rancangan Pengendali Pintu Air Menggunakan Motor DC ... 53
3.16 Pembatas Putaran Motor ... 55
3.17 Warning Sytem... 56
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN... 57
4.1 Pengamatan Sensor Ketinggian Air ... 57
4.2 Pengamatan Rangkaian Pengkondisi Sinyal... 62
4.3 Pengamatan Pengubah Analog Ke Digital (ADC0804)... 66
4.5 Pengamatan Keluaran Demodulator FSK XR-2211 ... 71
4.6 Pengamatan RS232 ... 73
4.7 Pengamatan Program Mikrokontroler AT89S51……… ... 74
4.7.1 Pengamatan Program Mikrokontroler AT89S51 Pada Bagian Pemancar………... 74
4.7.2 Pengamatan Program Mikrokontroler AT89S51 Pada Bagian Penerima... 75
4.8 Pengamatan Rangkaian Pembalik Putaran Motor DC dan Warning System L293D ... 75
4.9 Pengamatan Kerja Program Visual Basic ... 77
4.9.1 Pengamatan Form Pengaturan Otomatis... 77
4.9.2 Pengamatan Form Pengaturan Manual ... 80
4.9.3 Pengamatan Form Menu Bantuan Menggunakan Program ... 81
4.10 Pengamatan Unjuk Kerja Sistem ... 82
4.10.1 Pengamatan Unjuk Kerja Sistem Menggunakan Media ... Transmisi Kabel ... 82
4.10.2 Pengamatan Unjuk Kerja Sistem Secara Telemetri FM... 83
4.10.2.1 Dengan Kecepatan Pengisyaratan Data 1200 bps... 84
4.10.2.1 Dengan Kecepatan Pengisyaratan Data 1200 bps... 85
4.10.3 Kerja Sistem Pada Pengaturan Otomatis... 88
4.10.4 Kerja Sistem Pada Pengaturan Manual ... 91
BAB V. Kesimpulan dan Saran
... 955.1 Kesimpulan ... 95
DAFTAR PUSTAKA
LAMPIRAN
1. Tabel 2.1 Standar FSK... 14
2. Tabel 2.2 Konfigurasi kaki-kai DB-9 ... 20
3. Tabel 3.1 Penskalaan tegangan... 26
4. Tabel 3.2 Tabel kebenaran pembalik putaran motor DC... 53
5. Tabel 4.1 Tabel perbandingan data praktek dan perhitungan teori .. rangkaian pengkondisi sinyal... 61
6. Tabel 4.2 Tabel perbandingan data praktek dan teori ADC0804 ... 67
7. Tabel 4.3 Tabel keluaran modulator FSK XR-2206... 69
8. Tabel 4.4 Tabel keluaran demodulator FSK XR-2211... 72
9. Tabel 4.5 Tabel pengamatan P1 Mikrokontroler AT89S51 pada... bagian penerima... 76
10.Tabel 4.6 Tabel pengamatan IC L293D ... 77
11.Tabel 4.7 Tabel pengamatan ketinggian air sungai yang ... tertampil pada PC dengan media transmisi kabel ... 83
12.Tabel 4.8 Tabel perbandingan ketinggian air sungai sebenarnya .... dengan yang Yang tertampil pada PC menggunakan ... transmisi pemancar FM... 84
13.Tabel 4.9 Tabel pengamtan ketinggian air sungai yang tertampil.... pada PC dengan kecepatan pengisyaratan data 300 bps ... 86
14. Tabel 4.10 Pengamatan kerja system pengaturan manual ... 91
1. Gambar 2.1 Konfigurasi penguat inverting... 7
2. Gambar 2.2 Konfigurasi penjumlah tegangan ... 7
3. Gambar 2.3 Konfigurasi buffer tegangn ... 8
4. Gambar 2.4 Konfigurasi pembagi tegangan ... 9
5. Gambar 2.5 Konfigurasi typical ADC 0804 ... 10
6. Gambar 2.6 Sistem modulasi FSK biner ... 11
7. Gambar 2.7 Sinusoidal FSK generator ... 11
8. Gambar 2.8 Rangkaian demodulator FSK... 13
9. Gambar 2.9 Tracking Bandwidth XRr-2211... 14
10. Gambar 2.10 Konfigurasi tombol reset ... 17
11. Gambar 2.11 Level tegangan TTL dan RS232 pada pengiriman huruf “A” tanpa bit paritas... 18
12. Gambar 2.12 Konektor DB-9 ... 19
13. Gambar 3.1 Blok diagram pengirim ... 22
14. Gambar 3.2 Blok diagram penerima... 22
15. Gambar 3.3 Skema telemetri ketinggian air sebagai pengatur model pintu air ... 22
16. Gambar 3.4 Potensio sebagai rangkaian pembagi tegangan... 23
17. Gambar 3.5 Rancangan sensor ketinggian air sungai ... 23
18. Gambar 3.6 Pembagi tegangan menggunakan potensiometer ... 28
19. Gambar 3.7 Buffer tegangn referensi ... 28
20. Gambar 3.8 Penguat inverting Vsensor ... 29
21. Gambar 3.9 Rangkaian penjumlah V1 dan V2 ... 29
37. Gambar 3.10 Konfigurasi ADC 0804 ... 30
AT89S51 ... 32
39. Gambar 3.12 Diagram alir pemprograman Mikrokontroler ... 33
40. Gambar 3.13 Diagram alir pembacaan ADC... 35
41. Gambar 3.14 Modulator FSK XR-2206 ... 36
42. Gambar 3.15 Demodulator FSK XR-2211 ... 40
43. Gambar 3.16 Mikrokontroler AT89S51 sebagai pengontrol arah putaran motor DC ... 41
44. Gambar 3.17 Diagram alir pengontrol arah putaranmotor DC... 41
44. Gambar 3.18 Pengubah aras tegangan... 42
45 Gambar 3.19 Rancangan form utama pengatur pintu air... 44
46. Gambar 3.20 Diagram alir form utama... 45
47. Gambar 3.21 Pesan pemberitahu sungai meluap ... 46
48. Gambar 3.22 Pesan pemberitahu sungai kering ... 46
49. Gambar 3.23 Diagram alir olah data ketinggian air... 47
50. Gambar 3.24 Rancangan form pengaturan manual ... 48
51. Gambar 3.25 Gambar diagram alir pengaturan manual... 49
52. Gambar 3.26 Tampilan atur ketinggian air... 50
53. Gambar 3.27 Diagram alir menu bantuan... 51
54. Gambar 3.28 Rancangan tampilan menu Tentang... 51
55. Gambar 3.29 Rancangan tampilan menu Menggunakan Program ... 52
56. Gambar 3.30 Rangkaian pembalik putaran motor ... 52
57. Gambar 3.31 Model pintu air... 54
58. Gambar 3.32 Pembatas putaran motor DC ... 55
59. Gambar 3.33 Rangkaian pembatas putaran motor DC ... 55
61. Gambar 4.1a Gambar Vsensor potensio multi turn saat air naik... 58
62 Gambar 4.1b Gambar Vsensor potensio multi turn saat air turun ... 58
63 Gambar 4.2 Gambar sensor ketinggian sistem lengan... 49
64 Gambar 4.3 Gambar rangkaian pengkondisi sinyal revisi... 61
65. Gambar 4.4a Vo sensor ketinggian potensio linear sistem lengan ...
saat air sungai naik... 61
66. Gambar 4.4b Vo sensor ketinggian potensio linear sistem lengan ...
saat air sungai naik... 62
67. Gambar 4.5 Bentuk gelombang keluaran Modulator XR-2206... 70
68. Gambar 4.6 Bentuk keluaran gelombang XR-2206 dengan input ...
data serial 01010111b ... 71
69. Gambar 4.7 Gambar output modem FSK ... 73
70. Gambar 4.8 Pengubahan level tegangan TTL menjadi level tegangan
RS232.………... 74
71. Gambar 4.9a P2.1 berlogika 0 ... 75
72. Gambar 4.9.b P2.0 berlogika 0 ... 75
73. Gambar 4.9c P2.2 berlogika 0 ... 75
74. Gambar 4.10 Instruksi untuk mengisi ketinggian air yang akan di atur 78
75. Gambar 4.11a Menu pemberitahu nilai yang dimasukkan melebihi ba-
tas yang seharusnya ... 78
76. Gambar 4.11b Menu Pemberitahu bila ketinggian air yang akan di
atur belum diisi ... 78
77. Gambar 4.12 Tampilan program Pengaturan Otomatis ... 79
78. Gambar 4.13 Gambar tampilan utama pengaturan manual ... 81
80. Gambar 4.15 Pengguanaan kabel sebagai media transmisi ... 82
81. Gambar 4.16 Kesalahan proses demodulasi data FSK ... 85
82. Gambar 4.17 Output modem FSK dengan kecepatan ...
Pengisyaratan data 300 bps... 87
83. Gambar 4.18 Gambar grafik perubahan waktu ...
terhadap ketinggian air yang diatur... 89
83. Gambar 4.19 Tampilan peringatan sungai meluap ... 90
84. Gambar 4.20 Tampilan sungai kering ... 90
85. Gambar 4.21 Pesan pemberitahu pintu sedang di buka ... 93
86. Gambar 4.22 Pesan pemberitahu pintu sedang di tutup ... 93
87. Gambar 4.23 Pesan pemberitahu pintu tidak dapat di buka lagi ... 94
88. Gambar 4.24 Pesan pemberitahu pintu tidak dapat di tutup lagi ... 94
A. Gambar Rangkaian... L1
B. Listing program Visual Basic 6.0... L3
B.1. Listing program pengaturan otomatis ... L3
B.2. Listing program pengaturan manual ... L10
C. Listing program Mikrokontroler AT89S51... L17
C.1. Listing program bagian pemancar... L17
C.2. Listing program bagian penerima ... L2
D. Foto Alat.. ... L22
E. Data Sheets... L25
E.1. Motor DC... L25
E.2. CA3140... L26
E.3. ADC0804... L36
E.4. AT89S51... L50
E.5. XR-2206 ... L67
E.6. XR-2211 ... L79
E.7. L293D... L89
E.8. MAX232... L97
PENDAHULUAN
1.1.
Judul
Telemetri Ketinggian Air Sebagai Pengatur Model Pintu Air Berbasis
Mikrokontroler AT89C51 dan PC (Water Level Telemetry As Flood Gate Regulator
Model Based On PC and AT89S51 Microcontroller)
1.2.
Latar Belakang Masalah
Dewasa ini perkembangan elektronika sudah maju sedemikian pesatnya. Salah
satu perkembangannya adalah banyaknya peralatan elektronika yang membantu dan
berpengaruh di dalam kehidupan sehari–hari. Perkembangan tersebut menuntut segala
sesuatunya bergerak cepat, praktis, dan serba instan, tidak hanya di perkotaan saja,
tetapi juga hingga ke pelosok desa. Masyarakat di kota maupun di desa saat ini sudah
dapat menikmati berbagai kemudahan dan kenyamanan dari beraneka ragam peralatan
elektronis yang ada, misalnya kipas angin yang diberi timer untuk mengatur kapan
harus berhenti berputar, pompa air yang diberi sensor sehingga pompa akan berhenti
ketika air di bak penampungan sudah penuh, lampu taman yang akan menyala sendiri
ketika hari sudah mulai gelap, dan masih banyak lagi. Semakin banyaknya sensor–
sensor elektronik yang ada, menuntut diciptakannya alat–alat baru dengan
mengaplikasikan sensor-sensor elektronik untuk mengontrol sesuatu yang bertujuan
untuk membantu di dalam mempermudah kerja manusia.
Sungai – sungai irigasi persawahan sekarang ini untuk mengatur ketinggian
mengawasi dan mengatur pintu air supaya air sungai tidak sampai meluap atau supaya
tidak terjadi kekurangan pasokan air.
Dari hal di atas akan timbul suatu permasalahan bila harus bekerja pada waktu
malam hari, karena air yang dikontrol tidak sepenuhnya kelihatan, atau harus
mengatur pintu air di waktu kondisi hujan, di mana air sungai yang akan dikontrol
ketinggiannya akan selalu berubah tergantung curah hujan sehingga diperlukan
pengawasan ekstra yang terus menerus.
Untuk mengatasi permasalahan – permasalahan tersebut maka diharapkan ada
suatu alat yang dapat untuk mengatur pintu air sesuai dengan ketinggian air sungai
yang diinginkan dengan perawatan dan penggunaan yang mudah, serta hasil
ketinggian air yang mudah dibaca.
1.3.
Tujuan
Dalam penelitian ini, peneliti mempunyai beberapa tujuan yang hendak di capai,
yaitu :
1. Membuat perangkat keras yang dapat mengukur ketinggian air sungai dan
mengirimkan data ketinggian air sungai ke komputer melalui komunikasi serial
yang termodulasi frekuensi
2. Membuat program pemantau ketinggian air sungai, menampilkannya dan
kemudian dipergunakan untuk mengatur model pintu air.
3. Mengaplikasikan pemprograman mikrokontroler AT89S51 dan pemprograman
Visual Basic.
1.4. Manfaat
Mengacu dari beberapa tujuan yang akan dicapai, diharapkan penalitian ini
dapat memberikan manfaat :
1. Penelitian ini diharapkan dapat dijadikan acuan dalam mengembangkan model
pengendalian pintu air yang sesungguhnya.
2. Mempermudah seseorang di dalam melakukan pemantauan dan pengaturan
ketinggian air sungai
1.5.
Batasan Masalah
Batasan pada alat yang dibuat yaitu:
1. Ketinggian air maksimum yang dapat terukur oleh sensor adalah 20 cm.
2. Sensor Ketinggian air menggunakan Potensiometer.
3. Komunikasi antara sensor ketinggian air dan motor DC dengan komputer
mengunakan Serial Communication (COM), dan pemprograman Visual Basic.
4. Telemetri ketinggian air menggunakan sinyal termodulasi frekuensi (FM).
5. Pemancar dan penerima FM tidak termasuk di dalam perancangan.
1.6 Metodologi Penelitian
Agar dapat melakukan perancangan alat dengan baik, maka penulis
membutuhkan masukan serta referensi yang didapatkan dengan metode :
1. Studi kepustakaan yang mencakup literatur-literatur, gambar-gambar dan manual.
2. Perancangan hardware dan software.
3. Pembuatan hardware dan software berdasar hasil perancangan.
5. Pengambilan data dari hardware dan software yang telah dibuat.
6. Memberikan kesimpulan.
1.7 Sistematika Penulisan
Sistematika penulisan terdiri dari lima bab, yaitu :
Bab I membahas tentang latar belakang, tujuan penelitian, manfaat,
pembatasan masalah, metedologi penelitian dan sistematika penulisan.
Bab II membahas dasar teori yang mendukung penelitian, yaitu tentang
Mikrokontroler AT89S51, Op-Amp, ADC 0804, RS232, modem FSK, Pemancar dan
penerima FM.
Bab III membahas tentang perancangan perangkat keras berupa sensor
ketinggian air, pengondisi sinyal, pengubah data dari analog ke digital (ADC),
konfigurasi mikrokontroler, konfigurasi Modem FSK, RS232, pembalik putaran
motor dengan IC L293D. Perangkat lunak berupa pemrograman mikrokontroler dan
pemrograman komputer dengan program Visual Basic.
Bab IV membahas tentang pengamatan kerja dari perangkat keras dan
perangkat lunak yang telah dibuat.
DASAR TEORI
Pengatur pintu air dibuat untuk mengendalikan debit air yang akan dialirkan
ke sungai, dengan cara membandingkan ketinggian air sungai yang dipantau dengan
ketinggian air yang diinginkan. Pemantauan ketinggian air dilakukan secara telemetri,
yakni dengan meletakkan sensor ketinggian air pada suatu tempat yang hendak kita
atur ketinggiannya, kemudian data hasil pemantuan di kirim secara termodulasi
frekuensi. Data hasil pemantauan yang diterima kemudian ditampilkan di PC.
Software pengatur model pintu air di buat dengan program Visual basic. Adapun cara
kerja program tersebut adalah sebagai berikut :
1. Data ketinggian yang ditampilkan berupa angka
2. Pada pengaturan otomatis user akan di minta untuk memasukkan nilai
ketinggian yang akan diatur.
3. Nilai ketinggian yang di masukkan user akan dipakai PC untuk mengatur
model pintu air, dengan cara membandingkan antara data yang di isi user
dengan data yang di hasilkan sensor air, sehingga didapat ketinggian air sesuai
dengan yang diinginkan user.
4. Pada pengaturan manual user dapat mengatur model pintu air untuk membuka
atau menutup secara manual, yakni dengan cara menekan tombol buka atau
tutup sehingga pintu air akan membuka atau menutup sampai tombol stop
ditekan.
5. Bila ketinggian air melebihi 18 cm, maka akan diberi peringatan berupa bunyi
Untuk membangun sistem tersebut dibutuhkan rangkaian untuk memantau
ketinggian air yang disusun oleh rangkaian Op-Amp yang berupa rangkaian
pengondisi sinyal. Data yang telah dikondisikan akan diubah menjadi data digital oleh
rangkaian ADC. Data digital dari ADC dibah menjadi data serial oleh
mikrokontroler, dimodulasikan secara FSK menggunakan XR-2206, ditransmisikan
menggunakan pemancar FM, data diterima kembali menggunakan penerima FM, di
demodulasikan menjadi data semula menggunakan XR-2211, kemudian dikirim ke
komputer dengan perantara RS232, komputer melakukan perintah-perintah untuk
mengatur pintu air. Komponen telemetri ketinggian air sebagai pengatur model pintu
air dapat dijelaskan sebagai berikut.
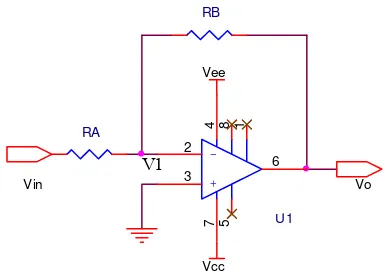
2.1 Penguat Inverting
Tegangan masukan Vin menggerakkan masukan pembalik melalui resistor
RA seperti pada gambar 2.1. Ini akan menghasilkan tegangan masukan pembalik
V1. Tegangan masukan diperkuat oleh perolehan tegangan kalang terbuka untuk
menghasilkan tegangan keluaran yang dibalikkan. Tegangan keluaran kemudian
diumpan balikkan ke masukan melalui resisitor umpan balik RB. Ini menghasilkan
umpan balik negatif karena keluarannya berbeda 1800 dengan masukan. Dengan
kata lain, setiap perubahan pada V1 dihasilkan oleh tegangan masukan yang
berlawanan dengan sinyal keluaran
Tegangan keluaran penguat inverting ditunjukan pada persamaan 2.1.
VO = in A B
V R R
×
R2 Rn R3 V2 R1 RF Vo Vee Vcc Vn V3 V1 + -U1 3 2 6 7 5 4 8 1
Vo V1 + -U1 CA3130 3 2 6 7 5 4 8 1 Vee
RA
Vin
Vcc
Gambar 2.1 Konfigurasi penguat inverting
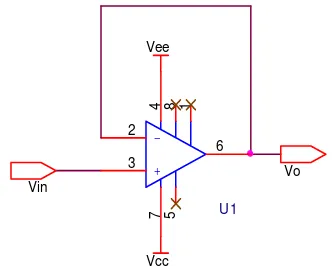
2.2 Penjumlah Tegangan
Rangkaian penjumlah berfungsi untuk menggabungkan dua sinyal analog
atau lebih menjadi satu keluaran. Konfigurasi penjumlah tegangan seperti pada
gambar 2.2.
Gambar 2.2 Konfigurasi penjumlah tegangan
Rangkaian penjumlah mengkombinasikan semua sinyal yang diperkuat menjadi
sebuah keluaran tunggal, ditentukan oleh :
VO = ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ × − − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ × − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ × − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ × − n n F 3 3 F 2 2 F 1 1 F V R R ... V R R V R R V R R
……… (2.2)
Dengan menggunakan harga R yang sama maka :
VO = −V1 −V2 −V3 −...−Vn ……….… (2.3)
2.3
Buffer
Tegangan
Buffer tegangan berfungsi untuk mempertahankan tegangan output agar tidak
terbebani oleh beban. Tegangan keluaran yang dihasilkan rangkaian buffer tegangan
persis sama dengan tegangan masukan. Konfigurasi buffer tegangan seperti pada
gambar 2.3.
+
-U1 CA3130
3 2
6
7 5 4 8 1
Vo
Vcc Vin
Vee
Gambar 2.3 Konfigurasi buffer tegangan
2.4 Rangkaian Pembagi tegangan
Rangkaian pembagi tegangan merupakan rangkaian yang terdiri dari
resistor yang dikonfigurasikan seperti pada gambar 2.4. Vout ditentukan dengan
persamaan 2.5
CC 2 1
2
out V
R R
V x
R +
= ……….….. (2.5)
VCC
R2
Vout
0
R1
2.5 Pengubah Analog Ke Digital (ADC)
Pengubah analog ke digital, berfungsi untuk mengubah tegangan
analog menjadi data digital. Data digital yang dihasilkan dinyatakan dalam kode biner
dengan menggunakan dua nilai tegangan yaitu 5 volt, yang dinyatakan dengan
lambang ‘1’ dan 0 volt dengan lambang ‘0’. Bilangan biner merupakan kombinasi
dari sederetan kode 1 dan 0.
Frekuensi clock dengan konfigurasi typical pada datasheet seperti Gambar
2.5 adalah
C x R x 1,1
1
= clock
f ………... (2.6)
Resolusi ADC dinyatakan dengan persamaan 2.6.
255 V -V
Resolusi= ref(+) ref(-) ………... (2.7)
Resolusi = Ketelitian ADC
Vref(+) = Referensi tegangan atas
Vref(-) = Referensi tegangan bawah
Sesuai dengan penggunaan typical ADC 0804 dengan 2
reff V
=2,5 volt, maka
mv 19,6 Resolusi
255 0 -5 Resolusi
= =
Perubahan ADC tiap bit dinyatakan dengan persamaan 2.8.
ADC Resolusi
konversi Tegangan
Level= ………. (2.8)
Rev erensi 0 U5 ADC0804/SO 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 4 5 1 2 3 +IN -I N GN D VREF/2 GN D DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR VC C /VR EF CLKIN INTR CS RD WR SOC Input 0
Mengaktif kan ADC EOC
VCC = 5 v olt
Data Digital R 10K C 150pF Baca ADC
Gambar 2.5 Konfigurasi typical ADC 0804
2.6 Modem FSK
Modem ( modulator demodulator) digunakan untuk mengubah bit-bit digital
menjadi frekuensi-frekuensi tertentu supaya dapat dimodulasikan dengan gelombang
radio, sehingga dapat ditransmisikan melalui gelombang radio untuk jarak jauh. Pada
penelitian ini menggunakan modem FSK (Frequency Shift Keying), yakni modem
yang menggunakan frekuensi tertentu untuk menyandikan nilai bit-bit digital. Bit 1
yang disebut frekunsi mark dan bit 0 yang disebut dengan frekuensi space.. Seperti
Gambar 2.6 Sistem modulasi FSK biner
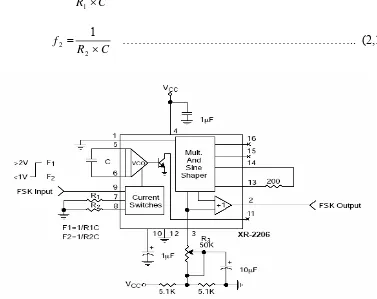
2.6.1 Modulator FSK XR-2206
Untuk menyandikan data digital menjadi frekunsi tertentu digunakan suatu
rangkaian demodulator FSK. Pada rangkaian modulator FSK XR-2206, seprti yang
ditunjukan pada gambar 2.7 untuk menghitung f1 yang disebut dengan frekuensi mark
dan f2 yang disebut dengan frekuensi space, di rumuskan :
C R f
× =
1 1
1
………... (2,10)
C R f
× =
2 2
1
……….. (2,11)
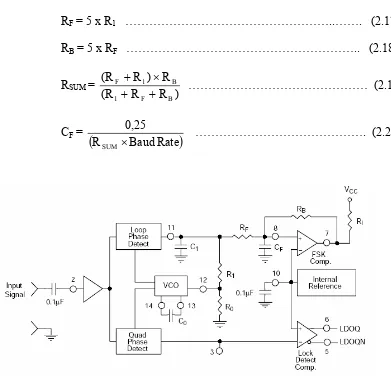
2.6.2 Demodulator FSK XR-2211
Untuk mendapatkan data yang telah di modulasi oleh modulator FSK menjadi
data kembali seperti semula, maka dibutuhkan rangkaian demodulator FSK. Untuk
dipakai sebagai demodulator FSK, diperlukan beberapa komponen tambahan, seperti
yang ditunjukkan pada gambar 2.8. Adapun langkah-langkah untuk mencari
komponen tersebut adalah sebagai berikut :
1. Hitung frekuensi tengah PLL, yang dirumuskan :
2 1 f
f
fo = × ……… (2.12)
Dimana : f1 = ferkuensi mark
f2 = frekuensi space
2. tentukan nilai timing resistor RO, nilainya harus berada diantara 10 KΩ sampai
100 KΩ. Disarankan nilai RO = 20 KΩ. Nilai akhir RO biasanya hasil seri
dengan potensiometer RX untuk memperbaiki hasil VCO.
RO = RO +
2
X R
………..………. (2.13)
3. Hitung nilai CO dengan rumusan :
CO =
o
O f
R ×
1
………... (2.14)
4. Hitung nilai R1 , untuk menentukan bandwidth, yang dirumuskan :
R1 = 2
) ( 1 − 2 ×
×
f f
f
RO O
………... (2.15)
5. Hitung nilai C1, untuk menentukan loop damping
C1 = 2
1 1250
ς
× ×
R CO
………..… (2.16)
6. Hitung kapasitor filter data CF,
RF = 5 x R1 ………..……. (2.17)
RB = 5 x RF ……….. (2.18)
RSUM=
) R R (R
R ) R (R
B F 1
B 1 F
+ +
× +
……… (2.19)
CF =
(
)
Rate Baud R
25 , 0
SUM ×
………. (2.20)
Gambar 2.8 Rangkaian demodulator FSK
Tracking bandwidth (frekuensi maksimum dan minimum yang masih
diperkenankan supaya frekuensi dapat di demodulasi ulang) seperti pada gambar 2.9,
mempunyai rumusan ;
Bandwidth,
0
f f Δ =
± . ………... (2.21)
1 0
0 R
R f
f Δ
……… . (2.22)
Gambar 2.9 Tracking Bandwidth XR-2211
Untuk menetapkan frekuensi mark dan space berdasar baud rate yang
digunakan, standar pada tabel 2.1 dapat digunakan sebagai acuan, dimana pada
penelitian ini di pakai standar BELL 202.
Tabel 2.1 Standar FSK
Frekuensi yang di pakai Standar Baud Rate
F Mark F Space
1200 bps 1300 Hz 2100 Hz
600 bps 1300 Hz 1700 Hz CCIT.V23
75 bps 390 Hz 450 Hz
1200 bps 1200 Hz 2200 Hz
150 bps 387 Hz 487 Hz BELL 202
5 bps 387 Hz 0 Hz
2.7 Mikrokontroler AT89S51
Mikrokontroler AT89S51 merupakan mikrokontroler yang kompatibel
2.7.1 Komunikasi Serial
Ada dua macam cara pengiriman (transmisi) secara serial yaitu komunikasi
sinkron dan komunikasi asinkron. Pada komunikasi sinkron sinyal detak dikirim
bersama-sama dengan data serial. Selanjutnya dalam transmisi data serial secara
asinkron, detak tidak dikirim bersama data serial.
Port serial pada AT89S51 bersifat duplex penuh atau full-duplex, artinya
port serial bisa menerima dan mengirim data pada waktu bersamaan. Port serial
memiliki penyangga penerima yaitu serial buffer (SBUF). Port serial dapat
menerima byte yang kedua sebelum byte yang pertama dibaca oleh register
penerima, melalui register SBUF. SBUF selalu berhubungan dengan akumulator
dalam mengisi dan menerima data.
Portserial pada AT89S51 bisa digunakan dalam empat mode kerja. Dari
ke-empat mode tersebut, 1 mode diantaranya bekerja secara sinkron dan tiga mode
lainnya bekerja secara asinkron. Semua mode dapat diatur melalui register kontrol
serial (SCON). Keempat mode kerja tersebut adalah :
Mode 0 Mode ini bekerja secara sinkron, data serial dikirim dan diterima melalui
kaki P3.0 (RxD), sedangkan kaki P3.1 (TxD) dipakai untuk menyalurkan
detak pendorong data serial yang dibangkitkan AT89S51. Data
dikirim/diterima 8 bit sekaligus, dimulai dari bit yang bobotnya paling
kecil atau LSB (bit 0), diakhiri dengan bit yang bobotnya paling besar
atau MSB (bit 7). Kecepatan pengiriman data (baudrate) adalah 1/12
frekuensi kristal yang digunakan.
Mode 1 Pada mode ini, data dikirim melalui kaki P3.1 (TxD) dan diterima
melalui kaki P3.0 (RxD) secara sinkron (begitu juga mode 2 dan 3).
bit start, disusul 8 bit data yang dimulai dari bit yang bobotnya paling
kecil (bit 0), diakhiri dengan 1 bit stop. Pada AT89S51 yang berfungsi
sebagai penerima bit stop adalah RB8 dalam register Serial Control
(SCON). Kecepatan pengiriman data (baudrate) bisa diatur sesuai
dengan keperluan. Mode inilah (mode 2 dan juga mode 3) yang umum
dikenal sebagai UART atau Universal Asynchronous
Receiver/Trasmitter.
Mode 2 Data dikirim 11 bit, diawali dengan 1 bit start, kemudian 8 bit data. Bit
ke-9 yang dapat diatur lebih lanjut dan diakhiri dengan 1 bit stop. Pada
AT89S51 yang berfungsi sebagai pengirim bit 9 tersebut berasal dari bit
TB8 dalam register SCON. Pada AT89S51 yang berfungsi sebagai
penerima bit 9 ditampung pada bit RB8 dalam register SCON,
sedangkan bit stop diabaikan dan tidak ditampung. Kecepatan
pengiriman data (baudrate) bisa dipilih antara 1/32 atau 1/64 frekuensi
kristal yang digunakan.
Mode 3 Mode ini sama dengan mode 2, hanya saja kecepatan pengiriman data
(baudrate) bisa diatur sesuai keperluan, seperti halnya pada mode
asinkron (mode 1, mode 2, mode 3).
Nilai baudrate pada komunikasi serial ditentukan oleh kristal yang
digunakan, karena berpengaruh pada jumlah limpahan timer. Perhitungan baudrate
sesuai dengan persamaan 2.1.
1 Limpahan Laju
32 2SMOD
timer
VCC
R
RST
C
0
SW1
1 2
2.7.2
Reset
Gambar 2.10 menunjukkan konfigurasi tombol reset. Reset akan aktif bila pin
RST diberikan logika high selama 2 µs.
Gambar 2.10 Konfigurasi tombol reset
Bila tombol reset tidak ditekan, maka pin RST akan mendapat input logika
low, sehingga mikrokontroler akan bekerja normal. Resistor dan kapasitor digunakan
untuk memperoleh waktu pengosongan kapasitor. Waktu pengosongan kapasitor
dapat dihitung sebagai:
C R
T = × ……….…………...… (2.24)
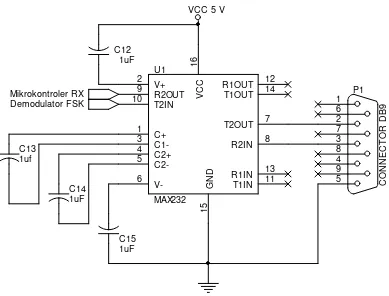
2.8
Pengubah Level TTL ke Level
Serial
Standar komunikasi serial yang banyak digunakan adalah standar RS232
yang dikembangkan oleh Electronic Industry Association and the
Telecommunications Industry Association (EIA/TIA) yang pertama kali
dipublikasikan pada tahun 1962. Ini terjadi jauh sebelum IC TTL populer sehingga
sinyal ini tidak ada hubungan sama sekali dengan level tegangan IC TTL. Standar
ini hanya menyangkut komunikasi data antara komputer DTE dengan alat-alat
pelengkap komputer DCE. Standar RS232 inilah yang biasa digunakan pada port
Standar sinyal serial RS232 memiliki ketentuan level tegangan sebagai
berikut:
1. Logika ‘1’ disebut ‘mark’ terletak antara -3 Volt hingga -25 Volt.
1. Logika ‘0’ disebut ‘space’ terletak antara +3 Volt hingga +25 Volt
2. Daerah tegangan antara -3 Volt hingga +3 Volt adalah invalid level, yaitu
daerah tegangan yang tidak memiliki level logika pasti sehingga harus
dihindari. Demikian juga, level tegangan lebih negatif dari -25 Volt atau
lebih positif dari +25 Volt juga harus dihindari karena tegangan tersebut
dapat merusak line driver pada saluran RS232.
Gambar 2.11 adalah contoh level tegangan RS232 pada pengiriman huruf
‘A’ dalam format ASCII tanpa bit paritas pada level TTL dan level RS232.
Rangkaian pengubah level tegangan TTL menjadi level tegangan RS232
menggunakan rangkaian voltage doubler atau rangkaian pengganda tegangan dan
rangkaian voltage inverter atau rangkaian pembalik tegangan.
Level TTL
Level RS232
Gambar 2.11 Level tegangan TTL dan RS232 pada pengiriman
huruf ‘A’ tanpa bit paritas.
2.9
Konfigurasi Port Serial
Gambar 2.12 merupakan gambar konektor port serial DB-9 pada bagian
belakang CPU. Pada komputer IBM PC kompatibel terdapat konektor serial DB-9
antara komputer (Data Terminal Equipment/DTE) dengan alat-alat pelengkap
komputer (Data Circuit-Terminating Equipment/DCE).
Gambar 2.12 Konektor DB-9
Tabel 2.2 menunjukkan konfigurasi kaki-kaki dan nama sinyal konektor
serial DB-9. Keterangan mengenai fungsi saluran RS 232 pada konektor DB-9
adalah sebagai berikut :
• Received Line Signal Detect. Dengan saluran ini DCE memberitahukan ke
DTE bahwa pada terminal input ada data masuk.
• Received Data, digunakan DTE menerima data dari DCE.
• Transmit Data, digunakan DTE mengirim data ke DCE.
• Data Terminal Ready, pada saluran ini DTE memberitahukan terminal
siap.
• Signal Ground, saluran ground.
• Ring Indikator. Pada saluran ini DCE memberitahukan ke DTE bahwa
sebuah stasiun menghendaki hubungan dengannya.
• Clear To Send. Dengan saluran ini DCE memberitahukan bahwa DTE
• Request To Send. Dengan saluran ini DCE diminta mengirim data oleh
DTE.
• DCE Ready. Sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah
siap.
Untuk dapat menggunakan port serial perlu diketahui alamatnya. Tersedia
dua port serial pada CPU, yaitu COM1 dan COM2. Base address COM1 adalah
1016 (3F8H0) dan COM2 adalah 760 (2F8h). Alamat tersebut adalah alamat yang
biasa digunakan. Tepatnya pada peta memori tempat menyimpan alamat tersebut,
yaitu memori 0000 0400H untuk base address COM1 dan memori 0000 0402H
untuk baseaddress COM2.
Tabel 2.2 Konfigurasi kaki-kaki DB-9
Nomor Nama Sinyal Direction Keterangan
1 DCD In Data carrier detect/Received Line
2 RxD In Received Data
3 TxD Out Transmit Data
4 DTR Out Data TerminalReady
5 GND - Ground
6 DSR In Data Set Ready
7 RST Out Request to Send
8 CTS In Clear to Send
9 RI In Ring Indikator
2.10 Motor DC
Motor DC adalah motor yang memiliki dua bagian dasar, bagian yang berputar
di sebut rotor dan bagian yang tidak berputar di sebut stator. Motor DC bekerja
berdasarkan medan magnet yang dihasilkan oleh kumparan yang terdapat pada rotor.
motor. Arah putaran dapat dikendalikan dengan mengatur arah putaran arus yang
PERANCANGAN
Telemetri ketinggian air sebagai pengatur model pintu air terdiri dari dua
bagian, yakni bagian pengirim dan penerima. Sehingga di dalam perancangan
dibutuhkan hal-hal sebagai berikut, di bagian pengirim terdiri dari sensor ketinggian
air, pengkondisi sinyal, pengubah analog ke digital (ADC), mikrokontroler sebagai
pengubah data pararel menjadi data digital, modulator FSK, dan pemancar FM seperti
yang ditunjukkan pada gambar 3.1. sedangkan pada bagian penerima terdiri dari
penerima FM, RS 232, PC, mikrokontroler sebagai pengatur arah putaran motor DC,
dan motor DC seperti yang ditunjukkan pada gambar 3.2. Peletakan sensor seperti
pada gambar 3.3.
Sensor Ketinggian air
Pengkondisi
Sinyal ADC Mikrokontroler
Modulator FSK
Pemancar FM
Gambar 3.1 Blok diagram pengirim
Penerima FM RS 232
Pintu Air
PC
Motor DC
Demodulator
FSK Mikrokontroler
Buzer
Gambar 3.2 Blok diagram penerima
DAM AIR
Model Sungai Antena penerima
Ruang kontrol
Pintu air
Antena Pemancar
Sensor Ketinggian air Aliran air
3.1 Sensor Ketinggian Air Sungai
Untuk mengetahui perubahan ketinggian air digunakan potensio multi turn
dengan diberi roda gigi. Potensio multi turn dirangkai sebagai rangkaian pembagi
tegangan, seperti pada gambar 3.4. Didalam sungai terdapat sebuah pelampung yang
dihubungkan dengan batang bergerigi yang berfungsi untuk memutar roda gigi pada
potensio mulit turn. Sehingga potensio akan berputar mengikuti perubahan ketinggian
air sungai yang akan di ukur. Seperti terlihat pada gambar 3.5
Vout
POT VCC
Gambar 3.4 Potensio sebagai rangkaian pembagi tegangan
Roda gigi pemutar Potensio meter tuas bergerigi naik turun
penggerak roda gigi
pelampung model sungai
Gambar 3.5 Rancangan sensor ketinggian air sungai
Karena yang dikontrol merupakan model pintu air, maka dalam perancangan
ini dirancang dengan skala 1 : 10, dan sensor dirancang untuk kedalaman sungai 20
3.2 Potensio Multi Turn
Potensio multi turn dalam perancangan ini mempunyai hambatan total 31
KΩ dengan jumlah putaran sebanyak 38 putaran, dengan nilai hambatan sebesar
815,79 Ω untuk satu putaran. Gigi roda yang akan dipakai untuk memutar potensio
memiliki keliling 3,1 cm dan jumlah gigi 10 gigi. Karena kedalaman maksimum air
sungai yang akan diukur 20 cm maka banyak putaran yang diperlukan potensiometer
sebesar :
Banyak putaran = cm 3,1
cm 20
= 6,45
6,5 putaran
≈
Dengan besar hambatan maksimum yang digunakan = 6,5 x 815,79 Ω
= 5302,63 Ω
Karena perubahan hambatan pada potensiometer akan mulai stabil pada
hambatan 5 KΩ, maka sensor diset pada hambatan awal bukan 0 Ω tetapi pada 5
KΩ. sehingga resistansi yang dipakai pada potensiometer adalah antara 5 KΩ sampai
10302,63 Ω. Bila potensio diberi masukan tegangan sebesar 5 Volt maka dapat
dihitung tegangan Vo minimum dan Vo maksimum, mengacu pada persamaan 2.5 :
Vo min = 5 31000
5000
× Vo max = 5
31000 63 , 10302
×
= 0,806 Volt = 1,662 Volt
Bila ketinggian air yang akan ditampilkan mempunyai interval perubahan tiap 1 cm,
maka setiap intervalnya potensio multi turn akan menghasilkan perubahan tegangan
sebesar
V interval = 1cm cm
20
V) 0,806 -V 1,662 (
= 0,0428 V
Dengan jumlah total interval 20
3.3 Pengkondisi Sinyal
Pengkondisi tegangan ini diperlukan supaya pengubah ADC mengenali
perubahan ketinggian air sungai setiap 1 cm atau setiap 42,8 mV. Pengubah ADC
0804 mempunyai resolusi 19,6 mV pada tegangan catuan 5 V seperti yang dijelaskan
pada BAB II, atau dengan kata lain output ADC 0804 akan berubah nilainya bila ada
perubahan tegangan sebesar 19,6 mV pada kaki inputnya. Berdasar pada karakter
yang dapat diterima program Visual Basic yakni karakter yang mewakili bilangan
biner 32 sampai 127, maka pada pengkondisi sinyal dirancang setiap kenaikan /
penurunan air sungai 1 cm maka bilangan biner output ADC akan naik / turun 4.
Karena ketinggian maksimum air sungai adalah 20 cm dan sensor dirancang untuk
perubahan ketinggian air sungai tiap 1 cm maka total interval ketinggian air sungai
adalah 20 dan total interval ADC yang diperlukan adalah 20 x 4 = 80 interval.
Bila ketinggian air 0 cm diwakili bilangan biner 33, maka untuk ketinggian
maksimum air sungai sebesar 20 cm diwakili bilangn biner 113. Bila ADC
mempunyai resolusi 19,6 mV maka besarnya tegangan yang dibutuhkan ADC untuk
menghasilkan nilai biner tersebut menurut persamaan 2.9 adalah sebagai berikut :
Vin ADC = Level x Resolusi ADC
Untuk bilangan biner 33 : Untuk bilangn biner 113 :
Vin ADC = 33 x 19,6 mV Vin ADC = 113 x 19,6 mV
Sehingga interval ADC adalah :
Interval ADC =
(
)
4 80V 0.647 -V 215 . 2
×
= 0,0784 V
Hubungan tegangan antara output sensor yang harus disesuaikan dengan ADC adalah
seperti pada tabel 3.1
Tabel 3.1 Penskalaan tegangan
Ketinggian air sungai
Sensor ketinggian air (Vo)
Tegangan input ADC (Vi)
Bilangan Biner ADC 0 cm 0,806 Volt 0,647 Volt 00100001b
20 cm 1,662 Volt 2,215 Volt 01110001b
Sesuai dengan tabel 3.1 bentuk persamaannya yaitu :
Vi = b.Vo + a ………. (3.1)
a = bilangan penjumlah tegangan input
b = bilangan penyesuai interval
Vi = tegangan yang dipakai untuk input ADC 0804
Vo = tegangan hasil dari sensor ketinggian air
Dimana interval ADC 0804 = 78 mV dan interval sensor ketinggian air = 42,8
mV, maka supaya intervalnya menjadi sama di pakai persamaan 3.2 :
b =
air sensor Interval
ADC Interval
……… (3.2)
b =
mV 42,8
mV 78,4
b = 1,832
maka persamaan 3.1 menjadi :
Untuk mencari nilai a maka di ambil salah satu data yakni Vi = 0,647 Volt
0,647 = (1,832 x 0,806) + a
a = - 0,829
sehingga persamaannya menjadi :
Vi = ( 1,832 x Vo ) – 0,829 ……… (3.4)
Untuk memudahkan dalam perancangan maka persamaan 3.3 menjadi :
Vi = -((- 1,832 x Vo) + ( 0,829)) ……….… (3.5)
Pada perancangan pengkondisi sinyal op-amp yang dipakai adalah tipe CA3140
3.3.1 Pembagi Tegangan
Untuk mendapatkan tegangan penjumlah sesuai dengan persamaan 3.5, di
pakai rangkaian pembagi tegangan, sehingga nilai resistor dapat di hitung dengan
mengacu pada persamaan 2.5 dan gambar 2.4.
Untuk mendapatkan Vref sebesar 0,829 Volt pada tegangan catuan 5 Volt maka nilai
R1 dan R2 :
Vreff = Vcc R
R R
2 1
2 ×
+
0,829 Volt = (5Volt) R
R R
2 1
2 × +
0,1658 =
2 1
2
R R
R
+
Bila nilai R2 ditentukan 1 KΩ, maka nilai R1 adalah 5,031 KΩ. Karena nilai R1 tidak
ada dipasaran maka di pakai potensiometer dengan nilai 10 KΩ, sehingga
R1 VCC = 5 V
5.031K
R2 1 K
Vref = 0.829 V
Gambar 3.6 Pembagi tegangan menggunakan potensiometer
3.3.2 Buffer Tegangan Referensi
Supaya tidak terbebani maka tegangan Vref sebesar 0,829 V perlu di buffer.
Konfigurasi buffer tegangan seperti pada gambar 3.7, dimana nilai V1 = Vref
Vee = -5V 5.031 k
Vcc = 5V
V1
+
-U1 CA3130 3
2
6
7 5 4 8 1 Vcc = 5 V
R1
R2 1 K
Gambar 3.7 Buffer tegangan referensi
3.3.3 Penguat Inverting Vsensor
Menurut persamaan 3.5 Vsensor perlu dikalikan dengan – 0,832, maka
digunakan rangkaian penguat inverting dengan penguatan 0,832. mengacu pada
persamaan 2.1dan gambar 3.8 maka nilai R3 dan R4 dapat dicari yakni :
V2 = - Acl x Vsensor ……… (3.6)
3 4 R R
= 1,832
Bila R3 ditentukan 10 KΩ maka nilai R4 =18.32 KΩ
V2
+
-U1 3
2
6
7 5 4 8 1
Vee = -5V R4 18.32 k R3
10K Vsensor
Vcc = 5V
Gambar 3.8 Penguat Inverting Vsensor
3.3.4 Rangkaian Penjumlah Tegangan
Mengacu pada persamaan 3.5 diperlukan rangkaian penjumlah, sesuai
dengan gambar 3.8 dan persamaan 2.2 :
V3 = - ( 2 6 7 1 5 7 R R
) V R R V +
Supaya didapat nilai V3 = - (V1 + V2), maka nilai R5 = R6 = R7 ditentukan sebesar
10 KΩ
V1
V3
Vcc = 5V R7
10k
V2
+
-U1 CA3130 3
2
6
7 5 4 8 1 R5
10k
R6
10k
Vee = -5V
3.4 Pengubah Analog ke Digital (ADC)
ADC pada perancangan ini digunakan untuk mengubah masukan
analog keluaran pengkondisi sinyal menjadi data digital 8 bit. Gambar 3.10
menunjukkan konfigurasi rangkaian ADC 0804 dengan mode operasi Hand-Shaking,
yakni dengan menghubungkan pin CS ke ground dan pin kontrol yang lain ke
mikrokontroler AT89S51. Bila menggunakan R10 =10 KΩ dan C1 = 150 pF seperti
yang digunakan dalam data sheet, maka sesuai persamaan 2.6 fclock dapat dihitung
besarnya : 1 10 C R 1,1 1 × × = clock f
fclock =
pF 150 K 10 1 , 1 1 × Ω ×
fclock = 606 KHz
Vout pengkondisi sinyal
8 bit data digital R10 10K U3 ADC0804 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 4 5 1 2 3 +IN -I N GN D VREF/2 GN D DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR V C C /VR EF CLKIN INTR CS RD WR P1 mikronkontroler EOC C1 150 pf SOC
VCC = 5V 2.2K
Baca ADC
2.2K
Gambar 3.10 Konfigurasi ADC 0804
Input ADC berupa tegangan DC yang berasal dari pengkondisi sinyal,
dimana nilainya berkisar antara 0,647 Volt sampai dengan 2,215 Volt.
Kontrol-kontrol ADC yang meliputi RD, WR dan INT akan aktif bila diberikan logika
kaki P2.2, P2.1 dan P2.0, seperti terlihat pada Gambar 3.12. Output ADC yang
berupa data digital dihubungkan dengan mikrokontroler pada port 1. Kaki DB7
pada ADC 0804 dihubungkan pada kaki P1.7 sebagai MSB (Most Significant Bit)
dan pada kaki DB0 sebagai LSB (Least Significant Bit) di hubungkan dengan kaki
P1.0 pada mikrokontroler. Vreff didapat dari dua buah resistor bernilai 2,2 kΩ
yang dirangkai pembagi tegangan Vcc.
3.5 Konfigurasi Mikrokontroler AT89S51 Sebagai Pengubah Data
Pararel 8 Bit menjadi Data Serial
Untuk mengubah data hasil ADC 0804 yang berupa data pararel 8 bit
menjadi data serial digunakan Mikrokontroler AT89S51 yang dikonfigurasi seperti
Gambar 3.10. Pin reset dihubungkan dengan saklar tekan, sebuah hambatan dan
kapasitor. 11.0592Mhz VCC C2 10uF U1 AT89C51 9 18 19 20 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 GN D PSEN ALE/PROG EA /VP P VC C P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 SOC ADC 0804 R11 10 K
DATA SERIAL OUT
SW1 SW PUSHBUTTON EOC BACA ADC C4 30 pF C3 30 pF VCC
Pada perancangan, waktu pengosongan dipilih sebesar 100 ms dengan asumsi
waktu reset telah lebih dari 2 µs, sesuai dengan persamaan 2.22. Bila nilai R11
dipilih 10 kΩ, maka nilai C2 adalah
2 000 . 10 1 ,
0 = ×C
C2 = 10 uF
Kristal sebagai sumber detak (clock) dipilih sebesar 11,0592 MHz agar dalam
perhitungan baud rate dapat mudah dihitung yang sesuai dengan persamaan 2.21. Bila
menggunakan kristal 11,0592 MHz, maka timer 1 didetak dengan laju
12 MHz 11,0592
yaitu sebesar 921,6 kHz. Pada persamaan 2.21 timer melimpah dengan laju limpahan
sebesar 32 x Baud rate. Bila menggunakan kristal 11,0592 Mhz didapatkan hasil
limpahan timer secara bulat. Jika menggunakan baud rate 1200 bps, maka laju
limpahan timer 1 sebesar:
detik 38400kali/ 1
Limpahan Laju
1200 32 1 Limpahan Laju
= × =
timer timer
Limpahan timer dengan kristal 11,0592 MHz membutuhkan detakan sebesar:
kali 24 detak
38400 921600 detak
1 Limpahan Laju
Instruksi Waktu
detak
= = =
timer
Pin EA/VPP dihubungkan dengan sumber VCC +5 Volt agar mikrokontroler
mengakses program internal dari PEROM. Jika dihubungkan dengan ground, maka
mikrokontroler akan mengeksekusi program eksternal. PIN PSEN dan ALE/PROG
Port 3, yakni P3.1 sebagai kaki TxD akan dikonfigurasikan sebagai penghasil
output data serial secara asinkron yang akan di modulasi oleh XR-2206. Pin kontrol
untuk ADC 0804 dihubungkan dengan kaki pada port 2.
3.6 Pemprograman Mikrokontroler Pengubah Data Pararel Menjadi
Data Serial
Pemrograman mikrokontroler digunakan untuk membaca data dari ADC. Data
dari ADC berupa data paralel yang kemudian diolah menjadi data serial dan
dikirimkan ke modulator FSK untuk selanjutnya ditransmisikan.
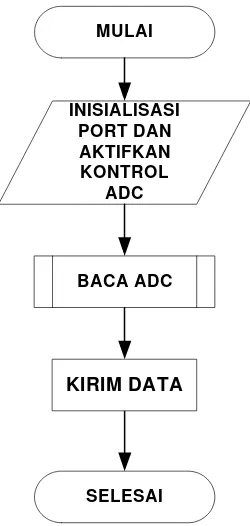
Adapun program yang digunakan mikrokontroler AT 89S51 dalam mengubah
data pararel menjadi data serial terdiri dari beberapa langkah yakni : pembacaan
ADC, dan pengiriman data serial, seperti yang ditunjukan gambar 3.12.
MULAI
INISIALISASI PORT DAN AKTIFKAN KONTROL
ADC
BACA ADC
SELESAI KIRIM DATA
Mula-mula program akan melakukan inisialisasi antara lain
1. Melakukan set pin yang digunakan sebagai kontrol ADC, yaitu pin P2.2, P2.1 dan
P2.0.
2. Melakukan pengaturan timer, sebagai penentu baudrate komunikasi serial, yaitu
1200 bit per second.
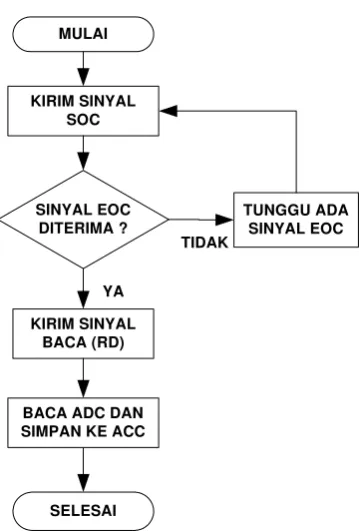
3.6.1 Rutin Baca ADC
Dalam melakukan konversi data analog menjadi digital, ADC 0804
membutuhkan beberapa kontrol. Adapun kontrol ADC yang diperlukan antara lain:
1. Start of Convertion (SOC), ADC mulai konversi, bila pin SOC di berikan logika
rendah.
2. End of Convertion (EOC), pemberitahuan keluar ADC, bahwa ADC telah selesai
mengkonversi. Tanda EOC merupakan logika rendah.
3. Read (RD), proses pengambilan data pada ADC.
Pertama rutin baca ADC dimulai dengan mengirimkan sinyal SOC, dengan
memberikan logika rendah pada pin SOC agar ADC mulai mengkonversi. Proses
kedua yaitu menunggu sinyal balasan dari ADC yang berupa logika rendah pada pin
EOC, yang berarti ADC selesai konversi. Proses ketiga yaitu dikirimkan sinyal RD,
agar data digital dapat keluar melalui output ADC menuju port 1.
Proses pembacaan ADC diteruskan dengan menyalin isi port 1 ke
akumulator yang nantinya akan di rubah menjadi data serial. Pengambilan data akan
dilakukan sebanyak dua kali tiap detiknya dengan cara memberikan tunda waktu
selama 0,5 detik setiap akan mengirim sinyal SOC. Gambar 3.13 merupakan gambar
MULAI
KIRIM SINYAL SOC
SINYAL EOC DITERIMA ?
KIRIM SINYAL BACA (RD)
BACA ADC DAN SIMPAN KE ACC
SELESAI
TUNGGU ADA SINYAL EOC TIDAK
YA
Gambar 3.13 Diagram alir pembacaan ADC
3.6.2 Kirim Data
Pengiriman data serial melibatkan register serial buffer dan
akumulator. Dimana data pada akumulator akan disalin ke serial buffer (Sbuf).
Pengiriman data serial dimulai dengan mengirim bit start, satu bit kemudian data pada
akumualor akan di kirim dengan cara mengeser kedelapan bit data di mulai dari LSB
sampai MSB, setelah bit kedelapan (MSB) dikirimkan bit stop akan dikirim sebagai
tanda pengiriman data telah selesai.
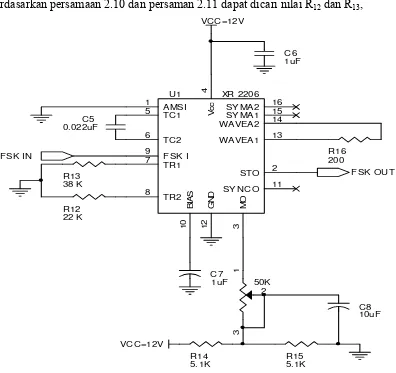
3.7 Modulator FSK
Untuk mengirimkan bit-bit digital maka diperlukan suatu sistem modulasi
digital yang dapat mengkonversi bit-bit tersebut ke dalam bentuk sinyal analog.
terintegrasi tipe XR-2206, yang disarankan pada data sheet seperti pada gambar
3.14.
Bila menggunakan baud rate 1200 bps, maka frekuensi space yang dipakai
adalah 2200 Hz dan frekuensi mark adalah 1200 Hz. Dari nilai tersebut maka
berdasarkan persamaan 2.10 dan persaman 2.11dapat dicari nilai R12 dan R13,
C6 1uF FSK OUT C5 0.022uF VCC=12V C8 10uF C7 1uF R16 200 R15 5.1K R14 5.1K R12 22 K VCC=12V R13 38 K FSK IN
U1 XR 2206 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 AMSI STO MO Vc c TC1 TC2 TR1 TR2 FSK I BI AS SY NCO GN D WAVEA1 WAVEA2 SY MA1 SY MA2 50K 1 3 2
Gambar 3.14 Modulator FSK XR-2206
Bila C5 ditentukan sebesar 0,022 uF, dengan asumsi nilai tersebut masih berada
diantara range 1000pF sampai 100 uF yang diijinkan pada data sheet. Maka nilai R12
dan R13 :
f1 =
5 13 C R
dimana f1 adalah frekuensi mark, sehingga nilai R13 :
R13 =
uF 0,022 Hz
1200 1
×
R13 = 37.878,78 Ω
Supaya ada dipasaran R13 = 38 KΩ
f2 =
5 12 C R
1
×
dimana f2 adalah frekuensi space, sehingga nilai R12 :
R12 =
uF 0,022 Hz
2200 1
×
R12 = 20.661,16 Ω
Supaya ada dipasaran R12 = 22 KΩ
3.8 Pemancar dan Penerima FM
Untuk transmisi jarak jauh menggunakan modulasi frekuensi (FM). Pemancar
dan Penerima FM yang digunakan dalam penelitian ini adalah rangkaian yang sudah
ada dan dijual dipasaran. Adapun pemancar FM yang dipilih adalah buatan RONICA
dengan nama Pemancar Mini FM 88-108 MHz, dan penerimanya adalah penerima
FM dengan merk dagang RONICA. Pemancar ini dapat memancarkan sampai dengan
jarak kurang lebih 10 m. Pemancar dan penerima ditala pada frekuensi 106 Mhz,
dikarenakan pada frekuensi ini tidak digunakan oleh stasiun pemancar lain sehingga
diharapkan data yang di hasilkan akan bagus. Karena berdaya rendah maka pemancar
tersebut sangat riskan terhadap derau.
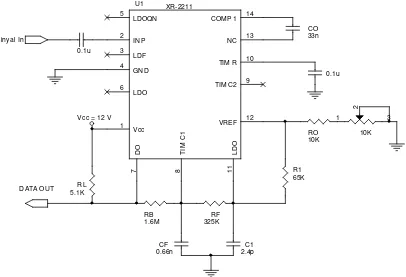
3.10 Demodulator FSK
Untuk mengubah data yang diterima menjadi bentuk data semula dipakai
(gambar 3.15). Bila menggunakan baud rate 1200 dengan frekuensi mark 1200
Hz dan frekuensi space 2200 Hz maka dapat dicari nilai komponen pendukungnya
sesuai data sheet dengan langkah sebagai berikut :
1. Sesuai dengan persamaan 2.12nilai fo :
2 1
O f f
f = × dimana f1 adalah frekuensi mark dan f2 adalah frekuensi space
Sehinga fO= 1200 ×2200 = 1624 Hz
2. Sesuai dengan persamaan 2.13 nilai RO :
RO sebagai resisitor timing nilainya harus berada dalam range 10KΩ sampai
100KΩ. Nilai yang disarankan data sheet adalah 20KΩ. Nilai RO adalah resistor
10 KΩ di seri dengan potensiometer, yang berfungsi untuk meperbaiki hasil
keluaran VCO. Bila diseri dengan potensiometer (RX) 20 KΩ maka nilai RO:
RO = RO +
2 RX
RO = 10 KΩ +
2 KΩ 20
RO = 20 KΩ
3. Sesuai dengan persamaan 2.14nilai CO :
CO =
O O f R
1 +
CO =
1624 20000
1 ×
CO = 33 nF
4. Sesuai dengan persamaan 2.15nilai R1:
R1 =
(
)
2f -f
f R
2 1
O O× ×
R1 =
(
)
21200 -2200
1624 20
R1 = 65 KΩ
5. Sesuai dengan persamaan 2.16nilai C1
C1 = dengan 0,5
R1 C 1250 2 O = × × ς ς
C1 =
0,25 K 65 nF 41 1250 × Ω ×
C1 = 0,0024 uF
6. Sesuai dengan persamaan 2.17nilai RF
RF = R1 x 5
RF = 65 KΩ x 5
RF = 325 KΩ
7. Sesuai dengan persamaan 2.18nilai RB
RB = RF x 5
RB = 325 KΩ x 5
RB = 1,6 MΩ
8. Sesuai dengan persamaan 2.19nilai RSUM
RSUM =
(
(
)
)
B F 1 B 1 F R R R R R R + + × +
RSUM =
(
(
)
)
1.6MΩ 325KΩ 65KΩ 1.6MΩ 65KΩ 325KΩ + + × +
RSUM= 312 KΩ
9. Sesuai dengan persamaan 2.20nilaiCF
CF =
(
)
Rate Baud R 25 , 0 SUM×
CF =
(
)
1200 K 312 25 , 0 × Ω
RB 1.6M
RF 325K
U1 XR-2211
1 2
3
4 5
6
7 8
9 10
11
12 13 14
Vcc INP
LDF
GND LDOQN
LDO
DO TIM C1
TIM C2 TIM R
LD
O
VREF NC COMP 1
10K
1 3
2
0.1u
RL 5.1K
RO 10K
R1 65K
CF 0.66n DATA OUT
Vcc = 12 V
0.1u CO 33n
C1 2.4p Siny al In
Gambar 3.15 Demodulator FSK XR-2211
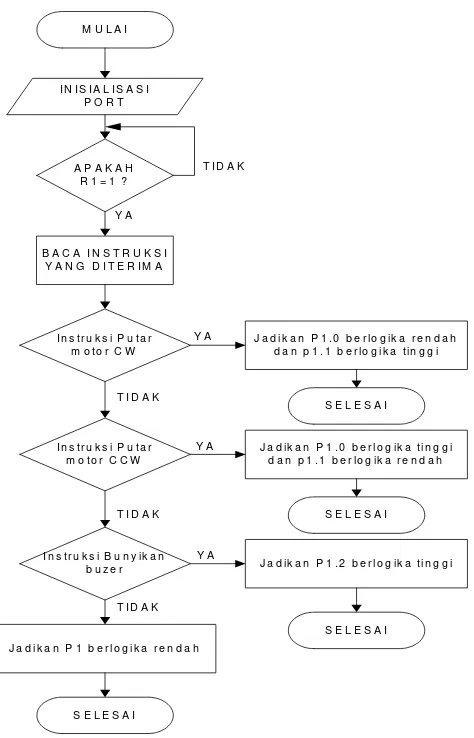
3.11 Mikrokontroler AT89S51 Sebagai Pengontrol Arah Putaran
Motor DC
Pada bagian penerima Mikrokontroler AT89S51 akan digunakan sebagai
pengontrol arah putaran motor DC. Mikrokontroler akan menerima instruksi dari PC
yang berupa data serial. Instruksi-instruksi yang dikirim akan diolah untuk
mengontrol apakah motor akan berputar CW atau CCW, dan juga memberikan
perintah untuk membunyikan buzer. Adapun rangkaian Mikrokontroler AT89S51
sebagai pengontrol arah putaran motor DC ditunjukkan pada gambar 3.16, dan
langkah kerjanya seperti yang ditunjukkan pada gambar 3.17.
M U L A I
I N I S I A L I S A S I P O R T
A P A K A H R 1 = 1 ?
B A C A I N S T R U K S I Y A N G D I T E R I M A
I n s t r u k s i P u t a r m o t o r C W
I n s t r u k s i P u t a r m o t o r C C W
I n s t r u k s i B u n y ik a n b u z e r
J a d i k a n P 1 . 0 b e r lo g ik a t in g g i d a n p 1 . 1 b e r lo g ik a r e n d a h J a d i k a n P 1 . 0 b e r l o