METODE FUNGSI PENALTI EKSTERIOR
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Disusun Oleh :
Maria Martini Leto Kurniawan NIM : 013114019
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Disusun Oleh :
Maria Martini Leto Kurniawan NIM : 013114019
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2008
EXTERIOR PENALTY FUNCTIONS METHOD
THESIS
Presented as Partial Fulfillment of the Requirements to Obtain the Sarjana Sains Degree
in Mathematics
By :
Maria Martini Leto Kurniawan Student Number : 013114019
MATHEMATICS STUDY PROGRAM MATHEMATICS DEPARTMENT FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY YOGYAKARTA
2008
TUHAN, PERISAIKU
(Mzm 28 : 1-9)
Orang-orang yang menabur dengan mencucurkan air
mata, akan menuai dengan bersorak sorai,
(Mzm 126:5)Segala sesuatu indah pada waktunya.
(Pengkotbah 3:11)Bila selama ini aku masih bertahan ...
Semua ini aku persembahkan hanya karena cintaku untuk :
Tuhan Yesus dan Bunda Maria, Teman dan Bunda tersayang yang dengan setia mendengarkan semua kepedihan hatiku…
Bapa dan Mama tercinta.... Ini janji Rita....walaupun perjalanan ini masih panjang, tapi aku senang bisa membuat bapa dan mama tersenyum kembali…
No Ovik tercinta ...Kamu adalah pemberian terindah yang Tuhan berikan buat oncu, dan oncu tidak akan pernah menyerah berjuang dalam hidup ini karena “KAMU”…
Cece, Ka Nano, Adeline, Ati, Ka Tonce & No
Faldi....Aku sangat-sangat bersyukur dan bangga menjadi bagian dari kalian semua…I love u all....
Isto yang sudah hadir dan mewarnai hidupku... Aku mau kamu tahu bahwa semenjak ada dirimu semua terasa indah....Thanks for your love…
Puji syukur penulis panjatkan kepada Tuhan Yesus atas segala kasih dan
perlindungan-Nya sehingga penulisan skripsi ini dapat terselesaikan. Skripsi ini
berjudul : “ METODE FUNGSI PENALTI EKSTERIOR “, yang diajukan
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains pada Program
Studi Matematika, Jurusan Matematika, Fakultas Sains dan Teknologi,
Universitas Sanata Dharma Yogyakarta.
Penulisan skripsi ini tidak lepas dari bantuan dan dukungan dari berbagai
pihak. Oleh karena itu, pada kesempatan ini penulis ingin menyampaikan ucapan
terima kasih kepada:
1. Ibu Lusia Krismiyati, S.Si, M.Si sebagai dosen pembimbing yang penuh
perhatian dan kesabaran telah membimbing serta memberi saran dan kritik
kepada penulis selama proses penulisan skripsi ini.
2. Bapak Y.G. Hartono, S.Si, M.Sc sebagai dosen pembimbing akademik.
3. Bapak Herry Pribawanto.S, S.Si, M.Si yang telah memberikan pinjaman
buku-buku matematika yang sangat membantu penulis dalam menyelesaikan
skripsi ini.
4. Bapak St. Eko Hari Parmadi, S.Si.,M.Kom sebagai dosen panguji.
5. Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.Sc., M.A., selaku Dekan FST-USD.
6. Segenap dosen dan karyawan sekretariat FST yang telah mendidik dan
meyediakan fasilitas yang sangat bermanfaat bagi penulis.
7. Bapa, Mama, No Ovik, Cece, Ka Nano, Adeline, Ati, Ka Tonce, No Faldi dan
seluruh keluarga besarku tercinta atas kasih sayang, doa, semangat, dukungan
serta kesabarannya selama ini.
8. No Ie, atas segala bantuan, doa dan dorongan buat saya. Terima kasih untuk
semuanya.
9. Isto untuk segala kasih dan kesabaran yang begitu tulus. Saya sangat
bersyukur mengenal kamu dan menjadi bagian dari hidupmu karena kau telah
mengajarkan saya begitu banyak hal
10.Sahabat-sahabatku seperjuangan angkatan 2001: Agnes, Alam, Fanya, Daniel,
Teddi, Deta, Vrysca, Upik, Yuli, Dani, Tabita, Andre, Indah, Ariel, Erika,
Wiwit, Maria, Very, Ray, dan April.
11.Mas Nadi yang selalu setia membantu dan menyemangati saya. Ma kasih mas.
12.Meggy atas segala bantuan dan dorongan semangat yang begitu tulus. Ma
kasih Gy.
13.Semua pihak yang telah membantu penulis baik secara langsung maupun tidak
langsung hingga selesainya penulisan skripsi ini.
Penulis menyadari bahwa skripsi ini masih banyak kekurangannya. Oleh
karena itu, penulis mengucapkan terima kasih bila ada kritik dan saran yang dapat
membangun penulis. Penulis berharap semoga skripsi ini dapat bermanfaat dan
menjadi referensi bagi pembaca.
Yogyakarta, 26 Mei 2008
Penulis
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini
tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan
dalam kutipan atau daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 26 Mei 2008
Penulis,
Maria Martini Leto Kurniawan
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERSEMBAHAN ... v
HALAMAN HAK CIPTA ... vi
ABSTRAK ... vii
ABSTRACT ... viii
KATA PENGANTAR ... ix
PERNYATAAN KEASLIAN KARYA ... xi
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xv
BAB I PENDAHULUAN ... 1
A. Latar Belakang Masalah ... 1
B. Perumusan Masalah ... 3
C. Batasan Masalah ... 4
D. Tujuan Penulisan ... 4
E. Manfaat Penulisan ... 4
F. Metode Penulisan ... 5
G. Sistematika Penulisan ... 5
A. Ruang Euclid dan Matriks ... 7
B. Topologi di Rn ... 8
C. Fungsi Kontinu dan Fungsi Terdiferensial ... 11
D. Himpunan Konveks dan Fungsi Konveks………. 15
E. Syarat Optimalitas Masalah Tidak Berkendala………. 21
F. Teori Optimisasi……… 25
G. Metode Newton……….. 27
BAB III METODE FUNGSI PENALTI EKSTERIOR ... 30
A. Konsep Fungsi Penalti ... 30
B. Interpretasi Geometris Fungsi Penalti ... 37
C. Metode Fungsi Penalti Eksterior ... 41
1. Bentuk Fungsi Penalti Eksterior……… 41
2. Algoritma Metode Fungsi Penalti Eksterior………. 43
D. Konvergensi Metode fungsi Penalti Eksterior……… 56
BAB IV PENUTUP ... 63
DAFTAR PUSTAKA ... 65
LAMPIRAN ... …. 66
DAFTAR GAMBAR
Halaman
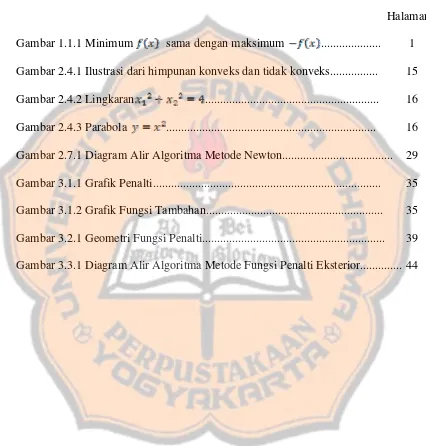
Gambar 1.1.1 Minimum sama dengan maksimum ... 1
Gambar 2.4.1 Ilustrasi dari himpunan konveks dan tidak konveks... 15
Gambar 2.4.2 Lingkaran ... 16
Gambar 2.4.3 Parabola ... 16
Gambar 2.7.1 Diagram Alir Algoritma Metode Newton... 29
Gambar 3.1.1 Grafik Penalti... 35
Gambar 3.1.2 Grafik Fungsi Tambahan... 35
Gambar 3.2.1 Geometri Fungsi Penalti... 39
Gambar 3.3.1 Diagram Alir Algoritma Metode Fungsi Penalti Eksterior... 44
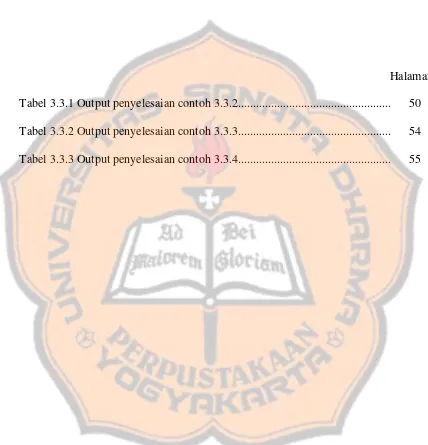
DAFTAR TABEL
Halaman
Tabel 3.3.1 Output penyelesaian contoh 3.3.2... 50
Tabel 3.3.2 Output penyelesaian contoh 3.3.3... 54
Tabel 3.3.3 Output penyelesaian contoh 3.3.4... 55
BAB I PENDAHULUAN
A. Latar Belakang Masalah
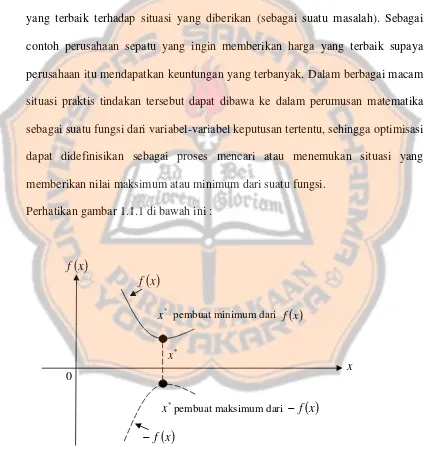
Secara umum optimisasi merupakan tindakan untuk mendapatkan hasil
yang terbaik terhadap situasi yang diberikan (sebagai suatu masalah). Sebagai
contoh perusahaan sepatu yang ingin memberikan harga yang terbaik supaya
perusahaan itu mendapatkan keuntungan yang terbanyak. Dalam berbagai macam
situasi praktis tindakan tersebut dapat dibawa ke dalam perumusan matematika
sebagai suatu fungsi dari variabel-variabel keputusan tertentu, sehingga optimisasi
dapat didefinisikan sebagai proses mencari atau menemukan situasi yang
memberikan nilai maksimum atau minimum dari suatu fungsi.
Perhatikan gambar 1.1.1 di bawah ini :
( )
x f( )
x f*
x pembuat minimum dari f
( )
xGambar 1.1.1 Minimumf
( )
x sama dengan maksimum dari − f( )
x*
x
x 0
*
x pembuat maksimum dari − f
( )
x( )
xsatu variabel ) dapat dilihat bahwa jika suatu titik menunjukkan nilai pembuat
minimum dari fungsi , titik yang sama itu juga menunjukkan nilai pembuat
maksimum dari negatif fungsi tersebut yakni
*
x
( )
xf
( )
x f− . Berarti optimisasi dapat
ditentukan dengan cara meminimalkan suatu fungsi karena maksimum dari fungsi
tersebut dapat ditemukan dengan mencari minimum dari negatif dari fungsi yang
sama.
Secara matematis optimisasi merupakan proses menemukan nilai
maksimum atau minimum dari suatu fungsi dengan cara meminimalkan fungsi
tersebut.
Secara umum masalah optimisasi dibagi menjadi dua bagian yakni,
optimisasi berkendala dan optimisasi tidak berkendala. Optimisasi berkendala
adalah optimisasi suatu fungsi yang disebut sebagai fungsi obyektif dengan
kendala-kendala berupa pertidaksamaan atau persamaan, sedangkan optimisasi
tidak berkendala adalah optimisasi suatu fungsi obyektif tanpa kendala. Pada
optimisasi berkendala jika fungsi obyektif atau fungsi kendala adalah nonlinear
maka masalah tersebut dinamakan masalah program nonlinear atau biasa disebut
sebagai masalah optimisasi berkendala nonlinear.
Ada beberapa teknik yang dapat digunakan untuk menyelesaikan suatu
masalah program optimisasi berkendala nonlinear. Semua metode ini dapat
diklasifikasikan ke dalam dua kategori yakni, metode langsung (direct method)
dan metode tidak langsung (indirect method). Metode langsung meliputi metode
3
Metode Arah Layak sendiri terbagi lagi menjadi dua metode yaitu metode
Zoutendijk dan metode Proyeksi Gradien. Sedangkan metode tidak langsung
meliputi Transformasi Variabel dan metode Fungsi Penalti, dimana metode
Fungsi Penalti dibagi lagi menjadi dua metode yakni metode Fungsi Penalti
Eksterior dan metode Fungsi Penalti Interior.
Metode Fungsi Penalti merupakan salah satu metode numerik yang
digunakan untuk mengubah masalah optimisasi dengan kendala menjadi masalah
optimisasi tanpa kendala dengan menambahkan fungsi penalti dan parameter
penalti pada fungsi obyektif.
Dalam skripsi ini hanya membahas metode Fungsi Penalti Eksterior.
Metode Fungsi Penalti Eksterior digunakan untuk menyelesaikan masalah
optimisasi nonlinear berkendala, dimana pendekatan yang digunakan adalah
dengan mengubah masalah optimisasi dengan kendala tersebut menjadi masalah
optimisasi tanpa kendala yang ekuivalen. Pada metode Fungsi Penalti Eksterior,
pencarian solusi optimal dimulai dari daerah tidak layak dan menghasilkan titik–
titik tidak layak yang limitnya merupakan penyelesaian optimal dari masalah asli.
B. Perumusan Masalah
Berdasarkan uraian yang dikemukakan dalam latar belakang, pokok
permasalahan dalam skripsi ini dapat dirumuskan sebagai berikut :
1. Apa itu metode Fungsi Penalti khususnya metode Fungsi Penalti
Eksterior?
dengan metode Fungsi Penalti Eksterior dan implementasinya dengan
program Matlab.
C. Batasan Masalah
1. Dalam skripsi ini metode yang digunakan dalam menyelesaikan masalah
tidak berkendala adalah metode Newton, akan tetapi dalam skripsi ini
hanya membahas kegunaan dan algoritma metode Newton.
2. Program yang digunakan untuk perhitungan numeris adalah program
Matlab.
D. Tujuan Penulisan
Penyusunan skripsi ini bertujuan untuk membahas metode Fungsi Penalti
Eksterior dan bagaimana algoritma metode Fungsi Penalti Eksterior dalam
menyelesaikan masalah optimisasi nonlinear berkendala serta konvergensi metode
Fungsi Penalti Eksterior .
E. Manfaat Penulisan
Manfaat yang diharapkan dalam skripsi ini adalah dapat mengetahui dan
memahami bagaimana bentuk metode Fungsi Penalti khususnya metode Fungsi
Penalti Eksterior dan mengetahui bagaimana metode Fungsi Penalti Eksterior
5
F. Metode Penulisan
Dalam penulisan skripsi ini penulis menggunakan metode studi pustaka
yakni, mempelajari referensi-referensi yang berkaitan dengan masalah optimisasi
nonlinear, khususnya mengenai metode Fungsi Penalti Eksterior dan
referensi-referensi mengenai dasar teori pendukung.
G. Sistematika Penulisan
Sistematika penulisan skripsi ini terdiri dari empat bab dengan urutan
sebagai berikut :
BAB I : PENDAHULUAN
Dalam bab I akan dibahas tentang latar belakang, perumusan
masalah, batasan masalah, tujuan penulisan, manfaat penulisan,
metode penulisan, dan sistematika penulisan.
BAB II : TOPOLOGI DI Rn DAN TEORI OPTIMISASI
Dalam bab ini akan dibahas konsep ruang Euclid dan matriks,
topologi di , fungsi kontinu dan fungsi terdiferensial, himpunan
konveks dan fungsi konveks, syarat optimalitas untuk masalah
berkendala, teori optimisasi serta metode Newton yang nantinya
akan digunakan untuk memahami metode Fungsi Penalti Eksterior.
n
Dalam bab III akan dibahas tentang konsep fungsi penalti,
interpretasi geometris fungsi penalti, pengertian metode Fungsi
Penalti Eksterior, bentuk umum Fungsi Penalti Eksterior dan
algoritma metode Fungsi Penalti Eksterior disertai beberapa contoh
masalah optimisasi nonlinear berkendala yang diselesaikan dengan
metode Fungsi Penalti Eksterior. Terakhir dibicarakan juga
implementasinya dengan program matlab serta konvergensi metode
Fungsi Penalti Eksterior.
BAB IV : PENUTUP
BAB II
TOPOLOGI DI Rn DAN TEORI OPTIMISASI
Dalam bab ini akan dibahas konsep ruang Euclid dan matriks, topologi di
, fungsi kontinu dan fungsi terdiferensial, himpunan konveks dan fungsi
konveks, syarat optimalitas untuk masalah berkendala, teori optimisasi serta
metode Newton yang nantinya akan digunakan untuk memahami metode Fungsi
Penalti Eksterior.
n
R
A. Ruang Euclid dan Matriks
Berikut akan didefinisikan mengenai hasilkali dalam Euclidean, ruang
Euclid, transpose matriks, dan matriks semidefinit positif.
Definisi 2.1.1
Jika u=
(
u1,u2,K,un)
dan v=(
v1,v2,Kvn)
adalah vektor-vektor sebarang pada , maka hasilkali dalam Euclid (Euclidean inner product) didefinisikan sebagain
R u.v
n nv
u v
u v
u + + +
= 1 1 2 2 K
.v
u .
Definisi 2.1.2
Ruang dengan operasi-operasi penjumlahan, perkalian skalar dan hasilkali
dalam Euclidean disebut ruang Euclid berdimensi n (n-dimensional Euclidean space) atau Ruang Euclid yang diberi notasi
n
R
n
Jika adalah matriks , maka transpose dari dinyatakan dengan , didefinisikan sebagai matriks
A m×n A At
m
n× yang didapatkan dengan mempertukarkan
baris-baris dan kolom-kolom dari A; sehingga kolom pertama dari adalah
baris pertama dari , kolom kedua dari adalah baris kedua dari , dan
seterusnya.
t
A
A At A
Definisi 2.1.4
Jika A adalah matriks simetris n×n , maka dikatakan semidefinit positif ( positive semidefinite ) jika untuk setiap
A
0
≥
Ax
xt x∈Εn dan ditulis A≥0.
B. Topologi di Rn
Definisi 2.2.1
Diberikan titik x∈Rn dan ε >0, Nε
( )
x ={
y∈Rn : y−x <ε}
disebut suatupersekitaran−ε dari x.
Definisi 2.2.2
Misalkan n
R
K ⊂ dan x∈K. Titik disebut titik dalam atau titik interior dari
x
K jika terdapat suatu persekitaran−ε dari x yang termuat di dalam K , yaitu
9
semua titik interior dari K disebut interior K dan dinotasikan dengan .
Selanjutnya,
K
int
K disebut terbuka jika K =int K.
Definisi 2.2.3
Misalkan n
R
K ⊂ , x disebut titik limit dari K jika untuk setiap ε >0
( )
φε ≠
∩N x
K . Himpunan semua anggota K beserta titik limitnya disebut
closure dari K dan dinotasikan dengan ClK. Selanjutnya, K disebut tertutup jika K =ClK.
Definisi 2.2.4
Suatu barisan vektor x1,x2,x3,K dikatakan konvergen ke titik limit x jika 0
→ −x
xk untuk k →∞, yaitu jika untuk sembarang ε >0terdapat bilangan
bulat positif N sedemikian sehingga xk −x <ε untuk semua . Barisan
biasanya dinotasikan dengan
N k ≥
{ }
xk dan x titik limit{ }
xk disajikan denganx
xk → untuk k →∞ atau dengan limk→∞xk =x.
Dengan menghapus elemen-elemen tertentu dari barisan
{
, diperolehsubbarisan, yang biasanya dinotasikan dengan
}
k
x
{ }
xk κ, dengan κadalah subsetdari semua bilangan bulat positif.
Semesta pembicaraan sekarang adalah bilangan real
Barisan bilangan real adalah suatu fungsi dari ke dalam . Jadi, fungsi
atau dengan
Ν R
R
f :Ν→ f
( )
n n∈Νadalah barisan bilangan real. Biasanyadinyatakan dengan . Barisan dengan sebagai suku ke-n akan ditulis
( )
nf sn sn
n
s atau
{
sn}
.Definisi 2.2.6
Misalkan f adalah fungsi yang terdefinisi di dalam himpunan bilangan real
R; f dikatakan mempunyai limit L di , dan ditulis , jika diberikan sebuah bilangan
0
x limx→x0f
( )
x = L0 >
ε , maka ada sebuah δ >0 sedemikian sehingga
( )
x −L <εf bila x∈Xdan 0< x−x0 <δ .
Definisi 2.2.7
Barisan
{ }
sn dikatakan konvergen jika terdapat s∈R dengan sifat, untuk sebarang ε >0 yang diberikan, terdapat N∈Ν sehingga untuk semuadengan berlaku
Ν ∈
11
∞ →
n dan ditulis limn→∞sn atau disingkat limsn =s. Suatu barisan yang tidak
mempunyai limit disebut divergen.
Definisi 2.2.8
Barisan
{ }
sn dikatakan naik jika sn ≤sn+1 dan turun jika untuk semua . Barisan naik dan barisan turun dinamakan barisan monoton.1
+
≥ n
n s
s
Ν ∈
n
Contoh 2.2.8
1. Barisan 1,1,2,2,3,3,K adalah barisan naik.
2. Barisan ,K
3 1 , 3 1 , 2 1 , 2 1 , 1 ,
1 adalah barisan turun.
Ke dua contoh di atas adalah barisan monoton.
C. Fungsi Kontinu dan Fungsi Terdiferensial
Definisi 2.3.1
Misalkan f :K →T, dimana K ⊂Rndan T ⊂ Rl. Fungsi dikatakan kontinu di
f
K
∈
x jika untuk setiap ε >0, terdapat δ >0 sedemikian sehingga untuk
dan K
∈
y y−x <δberlaku f
( ) ( )
y − f x <ε.Selanjutnya fungsi f dikatakan kontinu padaK jika kontinu di setiap titik
anggota
f
Diberikan fungsi f :K → R ,K ⊂R. Fungsi f dikatakan :
1. Naik pada K jika untuk setiap x1,x2∈K, dengan x1 < x2, maka
( )
x1 f( )
x2f < .
2. Turun pada K jika untuk setiap x1,x2∈K, dengan , maka .
2 1 x
x >
( )
x1 f( )
x2f >
3. Monoton pada K jika f naik pada K atau turun pada K.
Definisi 2.3.3
Misal . Turunan orde satu dari , dinotasikan dengan , didefinisikan sebagai berikut:
R R f : n →
f Df ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ ∂ ∂ ∂ ∂ = n x f x f x f
Df , , ,
2 1
L
Definisi 2.3.4
Misal f :Rn →R, gradien dari fungsi di ditulis
f x ∇f
( )
x , adalah transpose dari Df , yaitu :13
Definisi 2.3.5
Misalkan K himpunan tidak kosong di En, x∈int Kdan . Matriks Hessian dari fungsi pada
E K
f : →
f x, yang biasa dinotasikan dengan H
( )
x adalahmatriks yang elemen-elemennya terdiri dari turunan-turunan parsial ke dua dari
fungsi f yaitu :
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
. 2 2 2 2 1 2 2 2 2 2 2 1 2 2 1 2 2 1 2 2 1 2 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = n n n n n x f x x f x x f x x f x f x x f x x f x x f x f x x x x x x x x x x H M M M Definisi 2.3.6Misalkan K himpunan tidak kosong di En, dan terdiferensial dua
kali. Teorema Taylor orde dua adalah : untuk setiap , haruslah memenuhi :
E K
f : →
1
x x2∈K
( )
2( )
1( ) (
1 2)
(
2 1)
( )
(
2 1)
2 1 x x x H x x x x x x
x = f +∇f t − 1 + − t − f
dimana H
( )
x adalah matriks Hessian dari fungsi f pada x dan(
)
21 1 x
x
Misalkan K himpunan tidak kosong di Εn, x∈int Kdan . Maka dikatakan terdiferensial di
Ε
K
f : →
f x jika ada vektor ∇f
( )
x yang disebut vektor gradien, dan ada fungsi α :E→ E1sedemikian sehingga :( )
x = f( ) ( ) ( )
x +∇f xt x−x + x−x α(
x;x−x)
funtuk setiap x∈K, dimana lim x→x α
(
x;x−x)
=0.Fungsi dikatakan terdiferensial pada himpunan terbuka jika
terdiferensial pada setiap titik .
f L⊆ K
f L
Definisi 2.3.8
Misalkan K himpunan tidak kosong di En, x∈int Kdan . Maka cdikatakan terdiferensial dua kali di
Ε
K
f : →
x jika terdapat suatu vektor∇f
( )
x , danmatriks simetris n×n H
( )
x yang disebut sebagai matriks Hessian, dan suatu fungsi α:E →E1 sedemikian sehingga :( )
x =( ) ( ) ( ) ( ) ( )( )
x +∇ x x−x + x−x H x x−x + x−x(
x;x−x)
2
1 2
α
t t
f f
f
untuk setiap x∈K, dimana lim x→x α
(
x;x−x)
=0.Fungsi dikatakan terdiferensial dua kali pada himpunan terbuka jika
terdiferensial dua kali pada setiap titik .
f L⊆ K
15
Contoh 2.3.8
Misalkan
(
)
1 2. Diketahui2 2 2 1 2 1 2
1,x 2x 6x 2x 3x 4xx
x
f = + − − + x=
( )
0,0t . Maka( )
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − + − = ∇ 1 2 2 1 4 6 6 4 4 2 x x x xf x dan
( )
.6 4 4 4 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = x H Sehingga :
(
) ( )
(
)
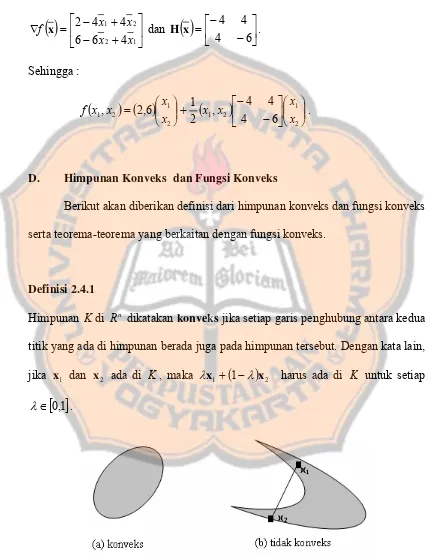
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = 2 1 2 1 2 1 2 1 6 4 4 4 , 2 1 6 , 2 , x x x x x x x x f .D. Himpunan Konveks dan Fungsi Konveks
Berikut akan diberikan definisi dari himpunan konveks dan fungsi konveks
serta teorema-teorema yang berkaitan dengan fungsi konveks.
Definisi 2.4.1
Himpunan Kdi Rn dikatakan konveks jika setiap garis penghubung antara kedua titik yang ada di himpunan berada juga pada himpunan tersebut. Dengan kata lain,
jika x1 dan x2 ada di K, maka λx1+
(
1−λ)
x2 harus ada di K untuk setiap[ ]
0,1∈
λ .
Beberapa contoh himpunan konveks.
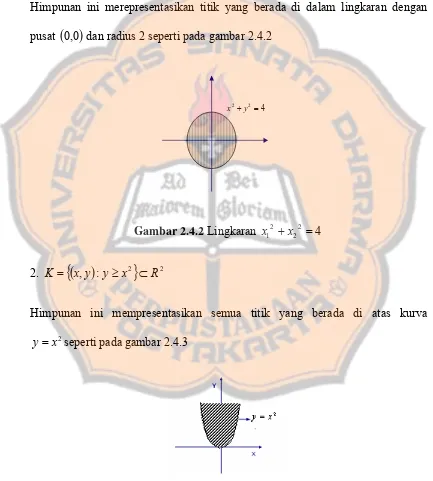
1. K =
{
(
x1,x2)
:x12 +x22 ≤4}
⊂R2Himpunan ini merepresentasikan titik yang berada di dalam lingkaran dengan
pusat
(
0,0)
dan radius 2 seperti pada gambar 2.4.24
2
2+ =
y x
Gambar 2.4.2 Lingkaran x12 +x22 =4
2. K =
{
( )
x,y :y≥ x2}
⊂ R2Himpunan ini mempresentasikan semua titik yang berada di atas kurva
seperti pada gambar 2.4.3 2
x y=
17
Definisi 2.4.2
Misalkan f :K →R, dimana K adalah himpunan konveks tidak kosong di R.
Fungsi f dikatakan konveks pada K jika
(
)
(
x1 1 x2)
f( ) (
x1 1) ( ),
f x2 f λ + −λ ≤λ + −λuntuk setiap x1,x2∈Kdan 0≤λ ≤1.
Contoh 2.4.2
Buktikan bahwa f
( )
x =ex,x∈Radalah fungsi konveksPenyelesaian :
Ambil x1,x2∈Rmaka
( )
1 dan 1x
e
f x =
( )
22
x
e
f x = , dan
(
)
(
)
( 1 (1 ) 2)2 1 1
x x
e f λx + −λ x = λ + −λ
( )2 1 1 x
x
e eλ • −λ
= .
Sedangkan,
( ) (
1) ( )
1(
1)
22 1
x x
e e
f
f λ λ λ
λ x + − x = + − .
Jadi untuk setiap x1,x2∈Rdan 0≤λ ≤1diperoleh :
(
)
(
x1 1 x2)
f( ) (
x1 1) ( )
f x2f λ + −λ ≤λ + −λ .
Jika suatu fungsi adalah konveks maka, untuk setiap dua titik dan
memenuhi
R K
f : → x1
2
x
( )
x2 ≥ f( )
x1 +∇ft( )(
x1 x2 −x1)
f
Bukti :
Misalkan f
( )
x adalah konveks, maka berdasarkan definisi (2.4.2)(
)
(
x2 1 x1)
f( ) (
x2 1) ( )
f x1f λ + −λ ≤λ + −λ
atau dapat ditulis sebagai :
(
)
(
x1 x2 x1)
f( )
x1(
f( )
x2 fx1)
f +λ − ≤ +λ − (2.4.1)
Pertidaksamaan (2.4.1) dapat dibentuk menjadi :
( )
x1 +λ(
f( ) ( )
x2 − f x1)
≥ f(
x1+λ(
x2 −x1)
)
f
( ) ( )
(
f x2 − f x1)
≥ f(
x1+(
x2 −x1)
) ( )
− f x1⇔λ λ
( ) ( )
(
(
)
) ( )
λ
λ 2 1 1
1 1 2 x x x x x
x f f f
f − ≥ + − −
Pada ruas kanan penyebutnya dikalikan dengan x2 −x1 sehingga menjadi :
( ) ( )
(
(
(
)
) ( )
)
(
2 11 2 1 1 2 1 1
2 x x
x x x x x x x x − ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − − − + ≥ − λ λ f f f
f
)
(2.4.2)19
( ) ( )
(
) ( ) (
2 11 1
1
2 x x
x x x x x x − ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ Δ − Δ + ≥
− f f f
f
)
(2.4.3)Dengan pengambilan limit untuk Δx→∞, sehingga pertidaksamaan (2.4.3)
menjadi :
( )
x2 ≥ f( )
x1 +∇ft( )(
x1 x2 −x1)
f
Teorema 2.4.4
Suatu fungsi f :K → Radalah konveks jika matriks Hessian H
( )
x adalahsemidefinit positif.
Bukti :
Dari Teorema Taylor bahwa :
(
x h) ( )
x( )
x x x θh! 2
1 2 *
1 1 * 1 * * = + ∂ ∂ ∂ + ∂ ∂ + = +
∑
∑∑
= == i j
n i n j j i i n i i x x f h h x f h f
f (2.4.4)
dimana 0<θ<1 .
Misalkan x* =x1 , x*+h=x2, dan h=x2 −x1, sehingga pertidaksamaan (2.4.4) menjadi :
( )
2( )
1( )(
1 2 1)
(
2 1)
{
1 θ(
2 1)
}(
2 12 1 x x x x x H x x x x x x
x = f +∇ft − + − t + − −
f
)
(2.4.5)Dapat dilihat bahwa untuk memenuhi Teorema 2.4.3 dan karena konveks,
maka pertidaksamaan (2.4.5) harus memberikan
( )
x f( )
xMisalkan fungsi f :K →R2 dan
(
)
2 2 2 2 1 21,x 3x 4x R
x
f = + ∈ . Buktikan bahwa
adalah fungsi konveks untuk setiap nilai
(
)
22 2 1 2
1,x 3x 4x
x
f = + .
Penyelesaian :
Berdasarkan Teorema 2.4.4 maka cukup menunjukkan bahwa H
( )
x semidefinitpositif,
( )
48 08 0 0 6 2 2 2 1 2 2 2 1 2 2 1 2 > = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = x f x x f x x f x f x H
Jadi terbukti f
(
x1,x2)
=3x12 +4x22 adalah fungsi konveks untuk setiap nilai x.Definisi 2.4.5
Misalkan K adalah himpunan terbuka tidak kosong di En, dan misalkan
terdiferensial pada E
K
f : → K. Fungsi dikatakan pseudokonveks jika
untuk setiap dengan
f
K
∈ 2 1,x
x ∇
( ) (
x1 x2 −x1)
≥0t
f , maka atau
ekuivalen dengan pernyataan bahwa jika
( )
x2 f( )
x1f ≥
( )
x2 f(
x1f <
)
, maka.
( ) (
1 2 − 1)
<0∇f x t x x
Definisi 2.4.6
Pseudokonveksitas di x adalah : fungsi f dikatakan pseudokonveks pada K
∈
x jika ∇
( ) (
x1 x2 −x1)
≥0t
21
E. Syarat Optimalitas Masalah Tidak Berkendala
Berikut akan didefinisikan syarat perlu dan syarat cukup tingkat pertama
sebagai syarat optimalitas untuk suatu masalah tidak berkendala.
Definisi 2.5.1
Perhatikan masalah meminimalkan f
( )
x pada En, dan misalkan nE
∈
x .
a. Jika f
( )
x ≤ f( )
x untuk semua x∈En, maka x dinamakan suatu peminimum global.b. Jika ada suatu persekitaran−ε Nε
( )
x sekitar x sedemikian hingga( )
x f( )
xf ≤ untuk semua x∈Nε
( )
x , maka x dinamakan suatu peminimum lokal.c. jika untuk semua x∈Nε
( )
x , x≠x , untuk ε >0, maka x dinamakansuatu peminimum lokal tegas.
Suatu peminimum global juga merupakan peminimum lokal.
Teorema 2.5.2
Misalkan bahwa f :En →Eterdiferensial di x. Jika ada sebuah vektor
sedemikian hingga
n
E
∈
d ∇f
( )
xtd<0 maka terdapat δ >0 sedemikian sehingga(
x d) ( )
f xf +λ < untuk setiap λ∈
( )
0,δ . Maka merupakan suatu arah turun (descent direction) dari did
Dari Definisi 2.3.7 maka diperoleh :
(
x+λd) ( )
= f x +λ∇f( )
x t +λdα( )
x;λdf (2.5.1)
dengan α
( )
x;λd →0untuk λ→0.Selanjutnya persamaan (2.5.1) dibagi dengan λdimana λ ≠0, diperoleh :
(
x d) ( )
x( )
x dα( )
x λdλ λ
; +
∇ = −
+ t
f f
f
Karena ∇f
( )
xtd<0 dan α( )
x;λd →0 untuk λ→0 maka terdapat suatu δ >0sedemikian sehingga ∇f
( )
xt + dα( )
x;λd <0 untuk setiap λ∈( )
0,δ . Sehinggaterbukti f
(
x+λd) ( )
< f x .Akibat 2.5.3
Misalkan bahwa f :En →E terdiferensial di x. Jika x peminimum lokal fungsi maka
f ∇f
( )
x =0.Bukti :
Dibuktikan dengan kontradiksi . Andaikan bahwa ∇f
( )
x ≠0.Misalkan d=−∇f
( )
x , didapatkan ∇f( )
xtd= ∇f( )
x 2 <0. Dari Teorema 2.5.2,terdapat suatu δ >0 sedemikian sehingga f
(
x+λd) ( )
< f x untuk λ∈( )
0,δ . Halini kontradiksi dengan asumsi bahwa x merupakan suatu peminimum lokal.
23
Syarat perlu di atas menggunakan vektor gradien yang komponen-komponennya
merupakan turunan parsial pertama dari , sehingga disebut sebagai syarat perlu
tingkat pertama.
f
Teorema 2.5.4
Misalkan bahwa f :En →E terdiferensial dua kali di x. Jika x adalah
peminimum lokal, maka ∇f
( )
x =0 dan H( )
x semidefinit positif. Teorema ini disebut sebagai Teorema syarat perlu tingkat kedua.Bukti :
Dari Definisi 2.3.8, maka diperoleh :
(
x λd) ( )
x λ( )
x d λ dH( )
xd λ2 d α( )
x;λd2
1 2 2
+ +
∇ + =
+ f f t t
f (2.5.2)
dimana α
( )
x;λd →0 untuk λ→0. Karena x peminimum lokal, maka dariAkibat 2.5.3 bahwa ∇f
( )
x =0. Selanjutnya pertidaksamaan (2.5.2) dibagi dengan λ2 >0 menghasilkan :(
) ( )
( )
(
d x d d x H d x d
x α λ
λ λ
; 2
1 2
2 = +
−
+ f t
f
)
(2.5.3)
Karena x peminimum lokal, f
(
x+λd) ( )
≥ f x untuk λ cukup besar. Maka padapertidaksamaan (2.5.3) jelas bahwa
( )
( )
; 0 21 2
≥
+ d x d
d x H
dt α λ untuk λcukup
besar. Dengan pengambilan limit untuk λ →0 maka dtH
( )
xd≥0. Karena ituMisalkan f :En →E merupakan pseudokonveks di
x. Titik x merupakan suatu
peminimum global jika dan hanya jika ∇f
( )
x =0. Teorema ini adalah Teoremasyarat cukup tingkat pertama.
Bukti :
Misalkan x adalah suatu peminimum global.
Akan ditunjukkan bahwa ∇f
( )
x =0.Berdasarkan Akibat 2.5.3 bahwa jika x adalah peminimum lokal, maka ∇f
( )
x =0dan oleh karena suatu peminimum lokal sama dengan peminimum global maka
terbukti bahwa ∇f
( )
x =0. Misalkan bahwa ∇f( )
x =0Akan ditunjukkan bahwa x merupakan suatu peminimum global.
25
F. Teori Optimisasi
Secara umum masalah optimisasi dibagi menjadi dua bagian yakni,
optimisasi berkendala dan optimisasi tidak berkendala :
1. Bentuk umum masalah optimisasi berkendala
Minimalkan f
( )
xdengan kendala gi
( )
x ≤0, i=1,2,L,m( )
j lhj x =0, =1,2,L,
dengan :
x = Vektor di En
= Fungsi obyektif
( )
x f( )
xi
g = Kendala berupa pertidaksamaan sebanyak m
= Kendala berupa persamaan sebanyak
( )
xj
h l
(2.6.1)
2. Bentuk umum masalah optimisasi tidak berkendala
Minimalkan f
( )
x
Jika fungsi obyektif atau fungsi kendala dalam persamaan (2.6.1) adalah
nonlinear maka masalah tersebut dinamakan masalah program nonlinear atau
Bentuk umum masalah optimisasi nonlinear berkendala adalah :
Minimalkan f
( )
xdengan kendala gi
( )
x ≤0, untuk i=1,2,L,m( )
j lhj x =0, untuk =1,2,L,
Dengan f,g1,K,gm,h1K,hladalah fungsi-fungsi kontinu pada n
E , Xadalah
subhimpunan dari En dan x∈En.
Definisi 2.6.2
Suatu vektor x∈Xdisebut penyelesaian layak masalah optimisasi nonlinear berkendala jika memenuhi semua kendala.
Definisi 2.6.3
Himpunan dari semua penyelesaian layak disebut daerah layak.
Definisi 2.6.4
Titik layak adalah titik yang menjadi anggota daerah layak.
Definisi 2.6.5
27
G. Metode Newton
Metode Newton merupakan salah satu metode yang paling terkenal dan
sering digunakan dalam menyelesaikan suatu sistem persamaan nonlinear. Metode
ini merupakan perkembangan dari metode Newton-Raphson dan metode
Titik-Tetap yang digunakan untuk menyelesaikan persamaan nonlinear. Syarat dalam
menyelesaikan sistem persamaan nonlinear dengan metode Newton adalah
sebagai berikut :
a. Sistem persamaan nonlinear yang dimaksud adalah sistem persamaan
non-linear yang terdiri dari n persamaan dan n variabel.
b. Semua fungsi yang terlibat dalam sistem persamaan nonlinear harus
terdiferensial.
Metode Newton adalah suatu algoritma iterasi fungsional yang
membangkitkan x( )k =x( )k−1 −J
( )
x( )k−1 −1F( )
x( )k−1 dengan dan adalah matriks Jacobi dari sistem persamaan nonlinear. Metode Newton memilikikonvergensi yang bersifat q-kuadratik dengan relasi kesalahan
1
≥
k J
( )
x(k ) ( )k
e e +1 ≤
Metode Newton sangat populer karena bentuk iterasinya yang sederhana.
Metode Newton dapat juga digunakan untuk menyelesaikan masalah
optimisasi nonlinear tidak berkendala karena syarat dari optimisasi nonlinear
adalah gradien dari fungsi obyektifnya sama dengan nol yang berarti bahwa, ada n
turunan dari setiap n variabel dari fungsi obyektifnya sama dengan nol yang
merupakan sistem persamaan nonlinear.
Selesaikan masalah optimisasi ini dengan menggunakan metode Newton.
Penyelesaian :
Dengan menggunakan syarat perlu bahwa, jika fungsi fungsi terdiferensial
maka syarat perlu tingkat pertama adalah
f
( )
x =0∇f .
Sehingga dengan mencari gradien dari f
(
x1,x2,K,xn)
menghasilkan :0 0 0
2 1
= ∂
∂ = ∂
∂ = ∂
∂
n
x f x f x f
M
(2.7.1)
Kumpulan semua persamaan yang ada di (2.7.1) berbentuk sistem persamaan
nonlinear. Kemudian setelah membentuk sistem persamaan nonlinear maka
29
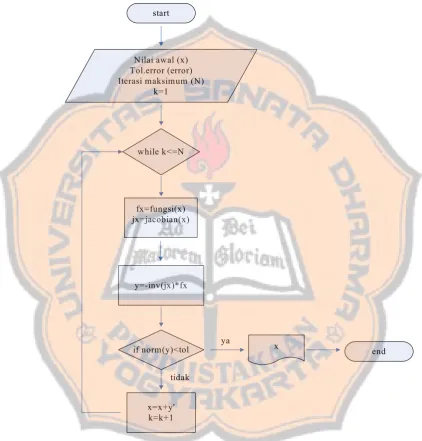
Diagram alir dari algoritma Metode Newton dalam menyelesaikan sistem
persamaan nonlinear.
start
Nilai awal (x) Tol.error (error) Iterasi maksimum (N)
k=1
while k<=N
y=-inv(jx)*fx
if norm(y)<tol x
x=x+y' k=k+1
end ya
tidak fx=fungsi(x) jx=jacobian(x)
METODE FUNGSI PENALTI EKSTERIOR
Dalam bab ini akan dibahas mengenai metode Fungsi Penalti Eksterior
dalam menyelesaikan masalah optimisasi nonlinear berkendala. Tetapi dalam
pembahasan ini penulis akan menjelaskan terlebih dahulu tentang konsep fungsi
penalti dan interpretasi geometris fungsi penalti. Kemudian dilanjutkan mengenai
bentuk umum Fungsi Penalti Eksterior dan algoritma Metode Fungsi Penalti
Eksterior serta contoh masalah yang diselesaikan dengan metode Fungsi Penalti
Eksterior dan diimplementasikan dengan bahasa pemrograman Matlab. Dan yang
terakhir adalah konvergensi metode Fungsi Penalti Eksterior.
A. Konsep Fungsi Penalti
Salah satu cara untuk mengubah masalah optimisasi dengan kendala
menjadi masalah optimisasi tanpa kendala adalah dengan menambahkan fungsi
penalti pada fungsi obyektif yang pada beberapa metode, bergantung pada nilai
kendala-kendalanya. Dalam kehidupan sehari-hari kita mengenal istilah penalti
terjadi karena adanya pelanggaran. Demikian juga dalam masalah optimisasi ini
fungsi penalti terjadi karena ada pelanggaran terhadap fungsi obyektif, yaitu
dengan menghilangkan kendala pada permasalahan itu. Fungsi penalti dapat juga
dipandang sebagai fungsi yang ditambahkan pada fungsi obyektif dengan
31
Metode dengan menggunakan fungsi penalti mentransformasikan masalah
dengan kendala ke dalam masalah tanpa kendala tunggal atau ke dalam barisan
masalah tanpa kendala. Kendala-kendala dibentuk ke dalam fungsi obyektif
melalui parameter penalti sedemikian hingga menghilangkan setiap
hambatan-hambatan dari kendala tersebut. Untuk membangun fungsi penalti perhatikan
masalah-masalah dibawah ini.
Contoh 3.1.1
Perhatikan masalah dengan kendala tunggal h
( )
x =0, yaitu :Minimalkan f
( )
xDengan kendala h
( )
x =0.Misalkan masalah tersebut diubah menjadi masalah tanpa kendala :
Minimalkan f
( )
x +μh2( )
x Dengan x∈En0
μ> suatu bilangan besar .
Secara intuitif dapat dilihat bahwa penyelesaian optimal dari masalah tersebut
haruslah mendekati nol, karena jika tidak maka suatu penalti besar
akan terjadi.
( )
x2
h
( )
x2
Contoh 3.1.2
Perhatikan masalah dengan kendala pertidaksamaan tunggal g
( )
x ≤0 yakni :Minimalkan f
( )
xDengan kendala g
( )
x ≤0.Andaikan masalah di atas diubah menjadi masalah tanpa kendala seperti berikut :
Minimalkan f
( )
x +μg2( )
x Dengan x∈En0
μ> suatu bilangan besar.
Maka dapat dilihat bahwa dengan bentuk f
( )
x +μg2( )
x mengakibatkan terjadinya penalti baik untuk g( )
x <0 atau g( )
x >0. Dalam masalah di atas suatu penaltiakan terjadi hanya jika titik adalah tidak layak, yaitu . Dengan
demikian pengandaian di atas salah dan masalah tanpa kendala yang sesuai adalah x g
( )
x >0Minimalkan f
( )
x +μmaks{
0,g( )
x}
Dengan x∈En
0
μ> suatu bilangan besar.
Jika g
( )
x ≤0, maka maksimum{
0,g( )
x}
=0, dan tidak ada penalti yang terjadi,dan jika g
( )
x >0, maka maksimum{
0,g( )
x}
>0, dan bentuk penalti μg( )
x terjadi.Secara umum, fungsi penalti yang sesuai harus memiliki suatu penalti
33
kendala-kendala tersebut dalam bentuk gi
( )
x ≤0 untuk i=1,K,mdan hi( )
x =0 untuk i=1,K,l maka fungsi penalti yang sesuai diberikan oleh : α( )
∑
[
( )
]
∑
[
( )
= = Ψ + Φ = l i i m i i h g 1 1α x x x
]
(3.1.1)dengan Φ dan Ψ adalah fungsi-fungsi kontinu yang memenuhi :
( )
( )
( )
0 jika 0 dan( )
0 jika 00 jika 0 dan 0 jika 0 ≠ > Ψ = = Ψ > > Φ ≤ = Φ y y y y y y y y (3.1.2)
Secara khusus, Φ dan Ψ berbentuk :
( )
[
{ }
]
py
y = maks 0,
Φ
( )
py y =
Ψ
dengan padalah bilangan bulat positif. Jadi fungsi penalti yang biasa
digunakan berbentuk
α
( )
[
{
( )
}
]
l( )
pi i p m i i h g
∑
∑
= = + = 1 1 , 0 maksαx x x
Fungsi f
( )
x +μα( )
x dinamakan fungsi tambahan.Contoh 3.1.3
Selesaikan masalah optimisasi berikut :
Minimalkan x
Dengan kendala −x+2≤0.
Misalkan α
( )
x =[
maks{
0,gi( )
x}
]
2, maka :Penyelesaian :
Misalkan masalah tersebut diubah menjadi masalah tanpa kendala :
Minimalkan x+μ
(
−x+2)
2 (3.1.3)Dengan x∈E
0
μ> suatu bilangan besar.
Selanjutnya penyelesaian optimal persamaan (3.1.3) dapat dicari dengan cara
mencari turunannya. Titik optimal akan dicapai ketika turunannya sama dengan
nol. Maka persamaan (3.1.3) setelah dicari turunannya menjadi:
(
2)( )
1μ
2
1+ −x+ −
(
2)( )
1 1μ
2 − + − =−
⇔ x
(
2)
1μ
2 − =−
⇔ x
μ
2 1 2= − − ⇔x
μ
2 1 2− = ⇔x
Nilai optimal x dapat dicari dengan cara mencari limitnya untuk μ yang
mendekati ∞, yaitu
2
μ
2 1 2 lim
μ ⎟⎟⎠=
⎞ ⎜⎜
⎝ ⎛
−
∞
→ .
Selanjutnya penyelesaian masalah (3.1.3) dapat ditunjukkan dengan grafik di
35
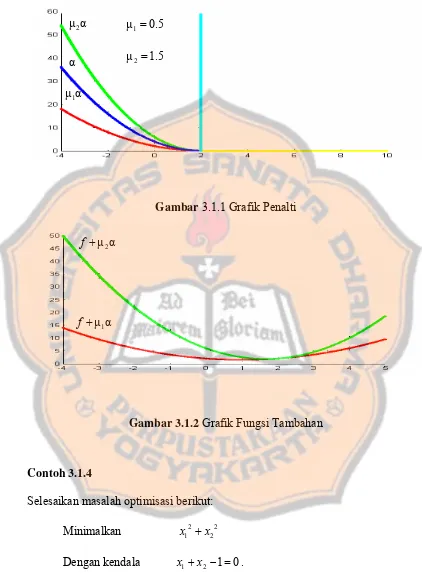
α
μ2 μ1 =0.5
5 . 1
μ2 =
α
α μ1
Gambar 3.1.1 Grafik Penalti α
μ2 +
f
α μ1 +
f
Gambar 3.1.2 Grafik Fungsi Tambahan
Contoh 3.1.4
Selesaikan masalah optimisasi berikut:
Minimalkan x12+x22
Perhatikan masalah penalti berikut, dengan μ>0 suatu bilangan besar
Minimalkan
(
1 2)
22 2 2
1 +x +μ x +x −1
x
Dengan kendala
(
x1,x2)
∈E2.Perhatikan bahwa untuk sembarang , fungsi obyektif konveks. Jadi syarat
perlu dan cukup untuk optimalitas adalah gradien dari
sama dengan nol yang menghasilkan : 0 μ≥
(
2 2 1 2 2 21 +x +μ x +x −1
x
)
(
1)
0μ 1 2
1+ x +x − =
x
0
μ μ
μ 1 2
1+ + − =
⇔x x x (3.1.4)
dan
(
1 2)
2 μ x x
x + +
(3.1.5)
Persamaan (3.1.4) dan (3.1.5) diselesaikan dengan menggunakan metode Gauss
Jordan menjadi :
2 1 2 1 B μ 2 1 μ 1 μB B B μ 1 1 μ 1 μ μ 1 μ 2 1 0 μ 1 μ μ 1 μ 1 μ μ 1
μ 1 μ
μ μ 1 μ 1 μ μ 1 μ μ μ μ 1 + + − + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + ++ + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + − μ 2 1 μ 1 0 μ 2 1 μ 0 1 μ 2 1 μ 1 0 μ 1 μ μ 1 μ 1 2 1 μB
1
μ
B
37
μ
2 1
μ
1 = +
x
μ
2 1
μ
2 = +
x
Jadi diperoleh :
μ
2 1
μ
2 1 =x = +
x .
Selanjutnya nilai dari dan dapat dicari dengan cara mencari nilai limitnya
untuk , yaitu 1
x x2
∞ → μ
μ
2 1
μ
lim
μ→∞ +
sehingga diperoleh
2 1 2 1 =x =
x .
Jadi penyelesaian optimal dari masalah penalti dapat dibuat sedekat-dekatnya
dengan penyelesaian dari masalah asli dengan menentukan cukup besar. μ
B. Interpretasi Geometris Fungsi Penalti
Untuk menggambarkan fungsi penalti secara geometri, digunakan contoh
3.1.4. Misalkan bahwa kendala h
( )
x =0dipertubasi sedemikian sehingga( )
x =εh yaitu x1+x2−1=ε. Misalkan v
( )
ε merupakan fungsi objektif maka akandiperoleh masalah berikut :
( )
ε ≡v Minimalkan x12+x22
Selanjutnya subsitusikan x2 ke dalam fungsi obyektif sehingga menjadi :
(
)
21 2
1 1 x
x + +ε− (3.2.1)
Nilai optimal akan dicapai ketika turunannya sama dengan nol, maka fungsi pada
(3.2.1) setelah dicari turunannya dapat ditulis sebagai :
(
1)( )
1 02
2x1+ +ε −x1 − =
(
1)
02
2 1− + − 1 =
⇔ x ε x
0 2 2 2
2 1− − + 1 =
⇔ x ε x
0 2 2
4x1− − ε = .
Masing-masing ruas dibagi dengan 2 menjadi :
0 1
2x1− −ε =
ε
+ = ⇔2x1 1
2 1 1 ε + =
⇔x .
Subsitusikan x1 ke dalam persamaan kendala sehingga menjadi :
ε ε = − + + 1 2 1 2 x ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − + = ⇔ 2 1 1 2 ε ε x 2 1 2 2 2 ε ε − − + = ⇔x 2 1 2 ε + =
⇔x .
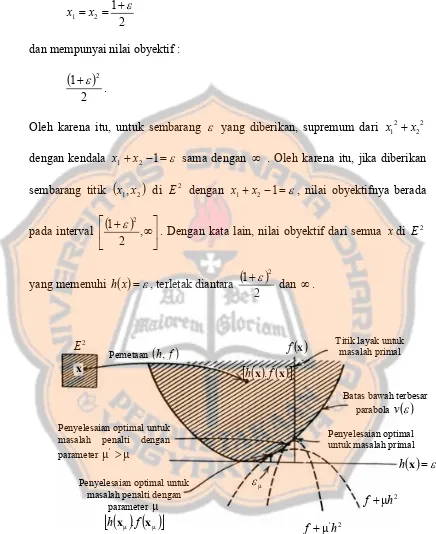
39 2 1 2 1 ε + = =x x
dan mempunyai nilai obyektif :
(
)
2
1+ε 2
.
Oleh karena itu, untuk sembarang ε yang diberikan, supremum dari
dengan kendala 2 2 2 1 x x + ε = −
+ 2 1
1 x
x sama dengan ∞ . Oleh karena itu, jika diberikan
sembarang titik
(
x1,x2)
di E2 dengan x1+x2 −1=ε , nilai obyektifnya beradapada interval
(
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∞ + , 2 1 ε 2. Dengan kata lain, nilai obyektif dari semua xdi E2
yang memenuhi h
( )
x =ε, terletak diantara(
)
2
1+ε 2
dan ∞.
Titik layak untuk masalah primal
( )
x f2
E
Pemetaan
( )
h, fx
[
( ) ( )
]
x x f
h .
Batas bawah terbesar parabola v
( )
εPenyelesaian optimal untuk masalah penalti dengan parameter μ' >μ
Penyelesaian optimal untuk masalah primal
( )
x =ε hμ
ε Penyelesaian optimal untuk
masalah penalti dengan parameter μ
( ) ( )
[
hxμ .f xμ]
2 μh f + 2 ' μh f +
3.2.1 Batas bawah dari himpunan ini dinyatakan oleh parabola
(
) (
ε)
( )
εv h
≡ + = +
2 1 2
1 2 2
. Untuk suatu nilai tertentu , masalah penalti adalah
meminimalkan
0
μ>
( )
x μh2( )
xf + dengan x∈E2. Kontur dari
diilustrasikan dalam ruang
k h
f +μ 2 =
( )
h, f yang ditunjukkan dalam gambar3.2.1 dengan parabola putus-putus. Irisan dari parabola tersebut dengan sumbu
sama dengan . Jadi jika diminimalkan, maka parabola tersebut harus
digeser mengarah ke bawah sebanyak mungkin, sedemikian sehingga parabola
tersebut masih mempunyai sekurang-kurangnya satu titik yang sama dengan
himpunan yang diarsir. Proses ini dilanjutkan sampai parabola tersebut
menyinggung himpunan yang diarsir, seperti ditunjukkan pada gambar 3.2.1. Hal
ini berarti bahwa untuk nilai yang diberikan, nilai optimum dari masalah
penalti merupakan perpotongan parabola pada sumbu . Perhatikan bahwa
penyelesaian optimal masalah penalti sedikit tidak layak dari masalah asli, karena
di titik singgung. Selanjutnya, nilai obyektif optimal dari masalah penalti
adalah sedikit lebih kecil dari nilai obyektif optimal primal. Dan perhatikan juga
bahwa jika nilai μ bertambah, parabola menjadi makin curam, dan titik
singgung mendekati penyelesaian optimal sebenarnya dari masalah asli.
f k f +μh2
μ
f
0 ≠
h
2
41
C. Metode Fungsi Penalti Eksterior
Metode Fungsi Penalti Eksterior adalah metode yang digunakan untuk
menyelesaikan masalah optimisasi nonlinear berkendala menjadi masalah tidak
berkendala dengan menambahkan fungsi penalti dan parameter penalti pada
fungsi obyektifnya. Proses pencarian penyelesaian optimal dimulai dari luar
daerah layak, oleh karena itu disebut metode Fungsi Penalti Eksterior.
Kendala-kendala akan ditambahkan pada fungsi obyektif dengan parameter penalti.
1. Bentuk Umum Fungsi Penalti Eksterior
Fungsi Penalti Eksterior merupakan bentuk fungsi tambahan yakni, fungsi
obyektif ditambah fungsi penalti. Misalkan fungsi merupakan fungsi tambahan,
dan f
( )
x merupakan fungsi obyektif, maka dengan mengambil :( )
[
{
( )
}
]
l( )
pi i p m i i h g
∑
∑
= = + = 1 1 , 0 maksα x x x
didapatkan fungsi tambahan
( )
[
{
( )
}
]
l( )
pi i k p m i i
k g h
f
z
∑
∑
= = + + = 1 1 μ , 0 maks
μ x x
x
yang disebut sebagai Fungsi Penalti Eksterior.
Jadi bentuk umum masalah Fungsi Penalti Eksterior adalah :
Minimalkan
( )
[
{
( )
}
]
l( )
pi i k p m i i
k g h
f
z
∑
∑
= = + + = 1 1 μ , 0 maks
μ x x
Contoh 3.3.1
Ubalah masalah berikut menjadi masalah Fungsi Penalti Eksterior :
Minimalkan
(
1 2) (
1 1)
3 2 31
,x x x
x
f = + + (3.3.1)
Dengan kendala 1−x1≤0
0
2 ≤
−x .
Penyelesaian :
Pertama akan dibentuk fungsi penalti dari masalah (3.3.1) yaitu
( )
[
(
)
]
[
(
)
]
22 2
1 maks 0 ,
1 , 0 maks
α x = −x + −x
kemudian di bentuk fungsi z= f
( )
x +μkα( )
x , menjadi(
)
[
(
)
]
[
(
)
]
22 2
1 2
3
1 1 μ maks 0 ,1 μ maks 0 , 3
1
x x
x x
z= + + + k − + k −
Maka masalah (3.3.1) dapat dibentuk menjadi masalah Fungsi Penalti Eksterior
yakni
Minimalkan
(
1 1)
3 2 μ[
maks(
0 ,1 1)
]
2 μ[
maks(
0 , 2)
]
2 31
x x
x x
43
2. Algoritma Metode Fungsi Penalti Eksterior
Berikut akan diberikan algoritma dari metode Fungsi Penalti Eksterior
untuk menyelesaikan masalah
Minimalkan f
( )
xDengan kendala g
( )
x ≤0( )
0h x =
dan x∈X
1. Tentukan titik awal x1, parameter penalti μ1>0, skalar penalti β>1,
0 >
ε dan k =1.
2. Bentuk fungsi obyektif untuk masalah optimisasi tidak berkendala
( )
x μkα( )
x fz= + , dengan
( )
[
{
( )
}
]
l( )
pi i p
m i
i h
g
∑
∑
= =
+ =
1 1
, 0 maks
α x x x
3. Tentukan penyelesaian dari masalah minimalkan , yakni z x*k.
4. Jika μ α
( )
x <εk langkah dihentikan dan diperoleh . Jika tidak,
lanjutkan ke langkah 2 dengan
k
*
x
k k βμ μ +1 = .
Perhatikan langkah 3, bahwa ketika masalah optimisasi nonlinear
berkendala setelah diubah menjadi masalah optimisasi nonlinear tidak berkendala
dengan metode Fungsi Penalti Eksterior maka penyelesaian dari masalah
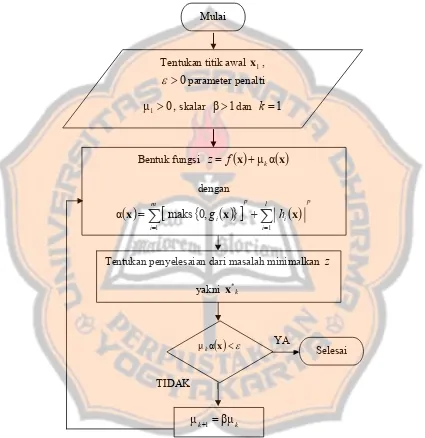
menyelesaikan masalah optimisasi nonlinear berkendala
Mulai
Tentukan titik awal x1,
0 >
ε parameter penalti
0
μ1> , skalar β>1dan k=1
Gambar 3.3.1 Diagram alir algoritma metode Fungsi Penalti Eksterior
Bentuk fungsi z= f
( )
x +μkα( )
xdengan
( )
[
{
( )
}
]
l( )
pi i p
m i
i h
g
∑
∑
= =
+ =
1 1
, 0
maks x x
x
α
Tentukan penyelesaian dari masalah minimalkan
yakni x
z
k
*
k k βμ μ +1=
YA
Selesai
TIDAK
( )
x <ε45
Dalam menyelesaikan masalah optimisasi nonlinear berkendala dengan
metode Fungsi Penalti Eksterior ditemukan dua kasus yakni, kasus umum dan
kasus khusus. Kasus umum adalah masalah yang dalam penyelesaiannya
memerlukan titik awal, sedangkan kasus khusus adalah masalah yang dalam
penyelesaiannya tidak memerlukan titik awal.
Berikut ini akan diberikan beberapa contoh kasus umum dan kasus khusus
masalah optimisasi nonlinear berkendala yang diselesaikan dengan metode Fungsi
Penalti Eksterior.
Contoh 3.3.2
Selesaikan masalah berikut :
Minimalkan
(
1 2) (
1 1)
3 2 31
,x x x
x
f = + + (3.3.2)
Dengan kendala 1−x1≤0 (3.3.3)
0
2 ≤
−x (3.3.4)
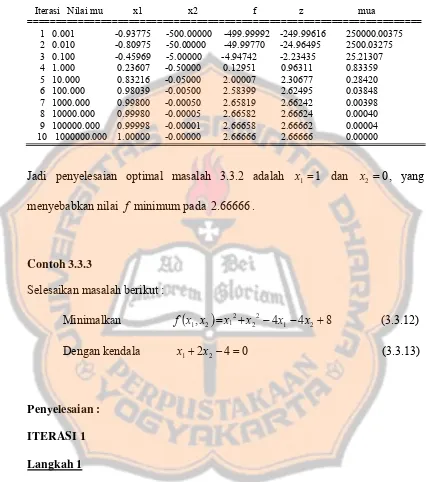
Penyelesaian : ITERASI 1 Langkah 1
Menentukan μ1 =0.001, skalar β=10, ε =0.00001dan k=1.
Langkah 2
Bentuk fungsi z= f
( )
x +0.001α( )
xdimana
( )
[
(
)
]
[
(
2)
]
2 21 maks 0 ,
1 , 0 maks
Menentukan penyelesaian dari masalah
Minimalkan
(
)
[
(
)
]
[
(
22 2
1 2
3
1 1 μ maks 0 ,1 μ maks 0 , 3 1 x x x x
z= + + + k − + k −
)
]
(3.3.5)Penyelesaian dimulai dari mencari turunan parsial terhadap x1 dan x2 yaitu :
(
)
[
(
12 1 1 1 , 0 maks 2 1 x x x z k − − + = ∂ ∂ μ
)
]
(3.3.6) dan
[
(
22 , 0 maks μ 2 1 x x z k − − = ∂ ∂
)
]
(3.3.7)Perhatikan persamaan (3.3.6) :
i.) Jika maks
(
0 ,1−x1)
=0maka(
1)
2 1 1 + = ∂ ∂ x x zii.) Jika maks
(
0,1−x1)
=1−x1 maka(
1)
2(
1 1 1 μ 2 1 x x x z k − − + = ∂)
∂Sehingga persamaan (3.3.6) dapat ditulis sebagai :
(
) (
)
(
)
[
1]
2 1 2
1 1 , 1 2μ 1
min x + x + − k −x (3.3.8)
Jika min=0, maka didapatkan
(
x1+1