Bab 6 : Dinamika Rotasi
Bab 6 : Dinamika Rotasi
Dan Keseimbangan
Dan Keseimbangan
Benda
Benda T
Tegar
egar
Dinamika Rotasi dan Keseimbangan Benda Dinamika Rotasi dan Keseimbangan Benda Tegar
Tegar
Menentukan koordinat titik berat suatu Menentukan koordinat titik berat suatu benda.
benda.
Gerak Translasi dan Rotasi Gerak Translasi dan Rotasi Indikator :
Indikator :
Gerak translasi dan gerak rotasi dirumuskan Gerak translasi dan gerak rotasi dirumuskan secara kuantitatif
secara kuantitatif
Pengaruh torsi diformulasikan pada kasus Pengaruh torsi diformulasikan pada kasus pengaruh torsi pada benda dalam kaitann pengaruh torsi pada benda dalam kaitannaa
dengan gerak rotasi benda tersebut dengan gerak rotasi benda tersebut
Dibuat analogi hukum II !e"ton tentang Dibuat analogi hukum II !e"ton tentang gerak translasi dan gerak rotasi
gerak translasi dan gerak rotasi Pernahkah #n
Pernahkah #nda melihat permainan da melihat permainan rollerroller coaster di pekan raa$ Kereta meluncur dan coaster di pekan raa$ Kereta meluncur dan berputar menurut sumbu putaran tertentu. berputar menurut sumbu putaran tertentu.
Pernahkah #n
Pernahkah #nda melihat katrol$ da melihat katrol$ %ebuah alat%ebuah alat ang dapat berputar dan memberikan
ang dapat berputar dan memberikan keuntungan mekanik. Benda ang berotasi keuntungan mekanik. Benda ang berotasi pasti ada momen gaa ang beker&a pada pasti ada momen gaa ang beker&a pada benda itu. benda itu. Gambar: Gambar: Katrol Katrol #. Momen Gaa #. Momen Gaa
Momen gaa merupakan salah satu bentuk Momen gaa merupakan salah satu bentuk usaha dengan salah satu titik sebagai titik usaha dengan salah satu titik sebagai titik acuan. Misalna anak ang bermain acuan. Misalna anak ang bermain
&ungkat'&ungkit( dengan titik acuan adalah &ungkat'&ungkit( dengan titik acuan adalah poros &ungkat'&ungkit. Pada k
poros &ungkat'&ungkit. Pada katrol angatrol ang berputar karena bergesekan dengan tali ang berputar karena bergesekan dengan tali ang
ditarik dan dihubungkan dengan beban. ditarik dan dihubungkan dengan beban. Momen gaa adalah hasil kali gaa dan Momen gaa adalah hasil kali gaa dan &arak terpendek arah garis ker&a terhadap &arak terpendek arah garis ker&a terhadap titik tumpu. Momen gaa sering disebut titik tumpu. Momen gaa sering disebut dengan momen putar atau torsi( diberi dengan momen putar atau torsi( diberi lambang t )baca: tau*.
lambang t )baca: tau*. Gambar:
Gambar:
Menarik beban menggunakan katrol Menarik beban menggunakan katrol t + , . d
t + , . d
%atuan dari momen gaa atau torsi ini %atuan dari momen gaa atau torsi ini adalah !.m ang setara dengan &oule. adalah !.m ang setara dengan &oule. Momen gaa ang menebabkan putaran Momen gaa ang menebabkan putaran benda searah putaran &arum &am disebut benda searah putaran &arum &am disebut
momen gaa positif. %edangkan ang momen gaa positif. %edangkan ang menebabkan putaran benda berla"anan menebabkan putaran benda berla"anan arah putaran &arum &am disebut momen gaa arah putaran &arum &am disebut momen gaa negatif.
negatif. Gambar: Gambar:
%kema permainan &ungkat &ungkit %kema permainan &ungkat &ungkit Titik - sebagai titik poros atau tit
Titik - sebagai titik poros atau titik acuan.ik acuan. Momen gaa oleh , adalah t + / , . d Momen gaa oleh , adalah t + / , . d Momen gaa oleh ,0 adalah t0 + 1 ,0 . d0 Momen gaa oleh ,0 adalah t0 + 1 ,0 . d0 Pada sistem keseimbangan rotasi benda Pada sistem keseimbangan rotasi benda berlaku resultan momen gaa selalu bernilai berlaku resultan momen gaa selalu bernilai
nol( sehingga dirumuskan: nol( sehingga dirumuskan: 2 t +
2 t +
-Pada permainan &ungkat'&ungkit dapat Pada permainan &ungkat'&ungkit dapat diterapkan resultan momen gaa + nol. diterapkan resultan momen gaa + nol. 2 t + 2 t + - 1 ,0 . d0 / , . 1 ,0 . d0 / , . d + -d + -, . d + ,0 . d0 , . d + ,0 . d0
Pada sistem keseimbangan translasi benda Pada sistem keseimbangan translasi benda berlaku resultan gaa selalu bernilai nol( berlaku resultan gaa selalu bernilai nol(
sehingga dirumuskan: sehingga dirumuskan: 2 , +
2 , +
-Pada mekanika dinamika untuk translasi dan Pada mekanika dinamika untuk translasi dan rotasi banak kesamaan'kesamaan besaran rotasi banak kesamaan'kesamaan besaran ang dapat dibandingkan simbol
ang dapat dibandingkan simbol besaranna.
besaranna.
Perbandingan dinamika translasi dan rotasi Perbandingan dinamika translasi dan rotasi Translasi Translasi Rotasi Rotasi Momentum linier Momentum linier p + m3 p + m3 Momentum sudut4 Momentum sudut4 ω ω5 + I5 + I Gaa Gaa , + dp6dt , + dp6dt Torsi Torsi
+ d56dt + d56dtττ Benda massa Benda massa Konstan Konstan , + m)d36dt* , + m)d36dt* Benda momen Benda momen inersia konstan4 inersia konstan4 6dt* 6dt*ωω + I )d + I )dττ
Gaa tegak lurus Gaa tegak lurus terhadap momentum terhadap momentum 7 p
7 pωω, +, + To
Torsi tegak lurursi tegak luruss momentum sudut momentum sudut 5 5×× ΩΩ + +ττ 8nergi kinetik 8nergi kinetik 8k + 9 m30 8k + 9 m30 8nergi kinetik 8nergi kinetik 00ωω8k + 9 I8k + 9 I Daa Daa P + , . 3 P + , . 3 Daa Daa ω ω . . ττP +P +
#nalogi antara besaran translasi dan besaran #nalogi antara besaran translasi dan besaran rotasi rotasi Konsep Konsep Translasi Translasi Rotasi Rotasi atatan atatan Perubahan sudut Perubahan sudut ss θθ θθs + r.s + r. Kecepatan Kecepatan 3 + ds6dt 3 + ds6dt 6dt 6dtθθ + d + dωω ω ω3 + r.3 + r. Percepatan Percepatan a + d36dt a + d36dt 6dt 6dtωω + d + dαα α αa + r.a + r.
Gaa resultan( momen Gaa resultan( momen ,, ττ + ,.r + ,.r ττ Keseimbangan Keseimbangan , + , + + - + -ττ Percepatan konstan Percepatan konstan 3 + 3- / at 3 + 3- / at ttαα- /- /ωω + +ωω s + 3-t + 9 at0 s + 3-t + 9 at0 t0 t0αα-t / 9-t / 9ωω + + θθ 30 + / 0as 30 + / 0as θα θα0 + / 00 + / 0ωω
Massa( momen kelembaman Massa( momen kelembaman m
m II
miri0∑I +
;ukum kedua !e"ton , + ma α + Iτ <saha , ds∫ = + θ dτ ∫ = + Daa P + ,.3 ωP + I 8nergi potensial 8p + mg 8nergi kinetik 8k + 9 m30 0ω8k + 9 I Impuls , dt∫ dtτ ∫ Momentum P + m3 ω5 + I ontoh ,0 >-o ? # B >@o ,
Dari gambar di atas( tentukan momen total terhadap poros ?. Aarak
?# + m dan ?B + C m( gaa , + - !( dan ,0 + !.
Aa"ab
Pada sistem keseimbangan translasi benda berlaku resultan gaa selalu bernilai nol(
<ntuk gaa , r + ?B + C m
. rαBesar momen gaa t + , sin . C°+ - . sin >@
+ - . -( . C + C !.m
#rah momen gaa t searah perputaran &arum &am
<ntuk gaa ,0 r0 + ?# + m
0. r0αBesar momen gaa t0 + ,0 sin . °+ . sin
>-+ . -(E . + 0 !.m
#rah momen gaa t0 berla"anan arah perputaran &arum &am
Momen gaa total adalah t + t0 / t0
+ C / 0 + - !m Momen Kopel
Kopel adalah pasangan dua buah gaa ang se&a&ar( sama besar dan berla"anan arah. Kopel ang beker&a pada sebuah benda akan
menghasilkan momen kopel ang
mengakibatkan benda berotasi. Momen kopel disimbolkan M , , , 1 / M , d d d d , , , )a* )b* )c*
Gambar )a* menun&ukkan sebuah kopel beker&a pada suatu benda. <ntuk
gambar )b* menun&ukkan bah"a kopel bertanda positif &ika putaranna searah
dengan perputaran &arum &am( tetapi &ika perputaran kopel berla"anan dengan arah perputaran &arum &am( maka kopel bertanda
Aika pada benda beker&a beberapa kopel maka resultan momen kopel total benda tersebut adalah M + M / M0 / M> / F / Mn ontoh , , P m 0m m ,> ,0 Aa"ab:
Batang P pan&angna m. Pada batang tersebut beker&a empat buah gaa , + ,> + E !( dan ,0 + , + C !( seperti tampak pada
gambar di samping. Tentukan besar dan arah momen kopel pada batang P tersebut. Gaa , dan ,> ang ber&arak d + >m membentuk kopel ang arahna searah perputaran &arum &am )/* dan besarna:
M + , 7 d + E 7 > + E ! m
Gaa ,0 dan , ang ber&arak d + > m membentuk kopel ang arahna berla"anan arah perputaran &arum &am )'* dan besarna: 0 ! m−M 0 + , 7 d + C 7 > +
Resultan momen kopel adalah: M + M / M0
0*−+ E / ) H ! m−+
Tanda negatif )'*( menun&ukkan bah"a momen kopel resultan
arahna berla"anan dengan arah perputaran &arum &am.
Koordinat Titik Tangkap Gaa Resultan
Aika terdapat beberapa gaa ang beker&a pada bidang J( maka setiap gaa tersebut dapat
diuraikan atas komponen'komponenna pada sumbu' dan sumbu'J. Misalkan( komponen' komponen gaa pada sumbu' adalah ,7( ,07( ,>7(F(,n7( ang &arakna masing'masing terhadap sumbu' adalah ( 0( >(F(n . %edangkan komponen'komponen gaa pada sumbu'J adalah , ( , 0 ( , > ( F(,n ( ang &arakna masing'masing terhadap sumbu' J adalah 7( 70( 7>(F(7n . %emua komponen gaa pada sumbu' dapat digantikan oleh sebuah gaa resultan , 7 ang &arakna o dari sumbu'( demikian &uga semua komponen
gaa pada sumbu'J dapat digantikan oleh sebuah gaa resultan , ang &arakna 7o dari sumbu'J.
Koordinat titik tangkap dapat ditentukan dengan persamaan sebagai berikut. 7o + +
o + +
Aadi koornitat titik tangkap )7o(o* ontoh
J ,0+E! ,>+@!
Dari gambar di samping( tentukan besar( arah( dan letak titik tangkap resultan.
'> ' - 0 > ,+'>! ,+'0! Aa"ab
%emua gaa se&a&ar sumbu'J( gaa ke atas positif dan ke ba"ah negatif( resultan gaa
adalah:
, + , / ,0 / ,> / ,
+ '> / E / @ 1 0 + @ ! )arah ke atas* 5etak titik tangkap gaa resultan adalah: 7o +
7o + 7o +
Momen Inersia Benda Tegar
Benda tegar adalah benda padat ang tidak berubah bentuk apabila dikenai gaa luar.
Dalam dinamika( bila suatu benda tegar
berotasi( maka αsemua partikel di dalam benda tegar tersebut memiliki percepatan sudut
didefinisikanτang sama. Momen gaa atau gaa resultan gerak rotasi sebagai berikut. #pabila sebuah benda tegar diputar terhadap suatu sumbu tetap( maka resultan gaa putar )torLue( baca torsi* luar terhadap sumbu itu sama dengan hasil kali momen inersia benda itu terhadap sumbu dengan percepatan sudut. Dirumuskan sebagai berikut.
α mi R0 i * . Σ + )τi atau θ ,i Ri %in Σ +τ
mi Ri0 disebut momen inersia atau momen kelembaman benda terhadap sumbuΣ putar( aitu pen¨ahan hasil kali massa tiap partikel
dalam suatu benda tegar dengan kuadrat &arakna dari sumbu.
Dirumuskan: mi . Ri0ΣI +
Definisi lain dari momen inersia adalah
perbandingan gaa resultan )momen* terhadap percepatan sudut. Dirumuskan: I + α + I . τmaka + Iτ α + I . τ, . R dan Σ +τKarena α , . R + I . Σmaka
Percepatan tangensial adalah &uga percepatan linier a( aitu percepatan singgung tepi roda. . R αa +
+α
persamaan men&adi : , . R + I .Σ
Momen inersia harus dinatakan sebagai hasil kali satuan massa dan kuadrat satuan &arak. <ntuk menghitungna harus diperhatikan bentuk geometri dari benda tegar homogen.
Tabel berikut menun&ukkan momen inersia beberapa benda homogen.
Momen inersia berbagai benda ang umum dikenal
I + 9 M )R0 / R00* I + 6> MR0 I + MR0 I + 06E MR0 I + 06> MR0
ontoh:
8mpat buah partikel seperti ditun&ukkan pada gambar dihubungkan oleh sebuah batang kaku ringan ang massana dapat diabaikan.
Tentukan momen inersia sistem partikel terhadap proses: sumbu ##( s # B kg 0 kg kg > kg 0 m 0 m 0 m # B umbu BB Penelesaian: I + N mi . Ri0 + m R0 / m0 . R00 / m> R>0 / m R0 + . -0 / 0 . 00 / . 0 / > . 0 + - / C / / -C I + >0 kg m0 I + N mi Ri0 + m R0 / m0 R00 / m> R>0 / m R0 + . 0 / 0 . 00 / . -0 / > . 00 + / C / - / 0 I + > kg m0
8mpat buah partikel massana kg( 0 kg( 0 kg( > kg seperti ditun&ukkan pada gambar(
dihubungkan oleh rangka melingkar ringan &ari' &ari 0 meter ang massana dapat diabaikan.
Tentukan momen inersia sistem terhadap poros melalui pusat lingkaran dan tegak lurus pada bidang kertas
# #O
+ *$∝ terhadap poros ini )∝Berapa besar momen gaa harus diker&akan pada sistem untuk memberikan suatu percepatan
<langi pertanaan )a* dan )b* untuk poros ## Penelesaian: I + N mi Ri0 + m R0 / m0 R00 / m> R>0 / m R0 + > . 00 / 0 . 00 / . 00 / 0 . 00 + 0 / C / / C + >0 kg m0 + >0 . + 0C !.m∝ + I . I + m0 R0 / m0 R00 / m0 R00 / m> R>0 / mR0
%ebuah benda sistem ang terdiri atas dua bola dengan massa masing' masing E kg
dihubungkan oleh sebuah batang kaku ang pan&angna m. Bola dapat diperlakukan
Tentukan momen inersia sistem terhadap sumbu ang tegak lurus batang dan melalui pusat -( ?
salah satu bola 5 + m Penelesaian: I + N mi Ri0 I + m# . R#0 / mB . RB0 / 60 m . 50 I + E . )-(E*0 / E . )-(E*0 / 60 . 0 . 0 I + E . -(0E / E . -(0E / 6 I + 0(E / 6 I + E60 / 6 + + 6 I + C6> kg m0 b. I + N mi Ri0 I + m#.R#0 / Mb.RB0 / 6> .m.l0 I + - / E . 0 / 6> . 0.0 I + E / 06> I + E kg m0 <&i Kompetensi I
%eorang tukang cat )massa EE kg* mengatur papan homogen ang beratna
- ! dengan kuda'kuda di B dan seperti pada gambar. Pan&ang #D + m(
#B + D + meter. Aarak kaleng cat )0 kg* dari # + -(E m. %ecara perlahan
ia mengecat sambil menggeser ke kanan. Pada &arak berapa meter dari dia
dapat menggeser sebelum papan ter&ungkit $ # B D
Pada sebuah batang horisontal # ang
pan&angna - m beker&a tiga buah gaa > !( 0 ! dan ! seperti terlihat pada gambar
Tentukan :
a. Resultan dari gaa'gaa tersebut.
b. Momen gaa ang beker&a pada sumbu' sumbu ang melalui #( B dan
c. 5etak titik tangkap gaa Resultanna. Batang #B ang pan&angna E meter dan beratna boleh diabaikan( padana beker&a E
buah gaa seperti tampak pada gambar di ba"ah ini. + >6.θAika tg
Tentukan besar dan letak dari gaa resultanna. Batang #B ang mempunai pan&ang m
mendapat gaa pada u&ung'u&ungna seperti tampak pada gambar. Tentukan besar dan letak gaa resultanna.
Tentukan momen inersia batang ang berputar pada poros ber&arak Q l dari u&ung titik
-?
'6 l />6 l
8mpat buah benda disusun pada rangka pada sumbu koordinat J seperti tampak pada gambar di ba"ah ini. M+M> +kg( M 0 +> kg( dan M + 0 kg. Tentukan momen inersia sistem &ika sumbu putarna adalah )a* sumbu J( )b* sumbu ang tegak lurus bidang J melalui titik ?. J M 0 m M> ? > m M0 > m M
Tentukan momen inersia bola pe&al massa bola m
R>π3olume bola + 6> massa keping + dm
r0 d7π3olume keping + d +
Perhatikan gambar di ba"ah ini. Tentukan lengan momen dan momen gaa dari gaa , + -- ! dan gaa ,0 + 0-- ! terhadap poros di titik # dan titik ( &ika #D + 5( #B + 560( dan # + >56. D
B ,0 # >-o ,
Pada sebuah batang horisontal # ang
pan&angna - m beker&a tiga buah gaa > !( 0 ! dan ! seperti terlihat pada gambar
Tentukan :
a. Resultan dari gaa'gaa tersebut.
b. Momen gaa ang beker&a pada sumbu' sumbu ang melalui #( B dan
c. 5etak titik tangkap gaa Resultanna. Batang #B ang pan&angna E meter dan beratna boleh diabaikan( padana beker&a E buah gaa seperti tampak pada gambar di ba"ah ini. + >6.θAika tg
Tentukan besar dan letak dari gaa resultanna. Menghitung Gerak Translasi dan Rotasi
Indikator :
Dinamika rotasi benda tegar dianalisis untuk berbagai kondisi
Gerak menggelinding tanpa slip dianalisis
. Momentum %udut Gerak Rotasi Benda Tegar Dalam dinamika( bila suatu benda berotasi
terhadap sumbu inersia (ωutamana( maka momentum sudut total 5 se&a&ar dengan kecepatan sudut ang selalu searah sumbu rotasi. Momentum sudut )5* adalah hasil kali . %ehingga dapat dirumuskan :ωmomen
kelembaman I dan kecepatan sudut
ω5 + I .
Bagaimana persamaan tersebut diperoleh$ Perhatikan gambar berikut. Momentum sudut terhadap titik - dari sebuah partikel dengan massa m ang bergerak dengan kecepatan )memiliki momentum P + m3* didefinisikan dengan perkalian 3ektor(
P×5 + R
m×atau 5 + R ×5 + mR
Aadi momentum sudut adalah suatu 3ektor ang
tegak lurus terhadap bidang ang dibentuk oleh R dan 3.
Dalam ke&adian gerak melingkar dengan -sebagai pusat lingkaran( maka 3ektor R dan 3 saling tegak lurus.
R ω +
%ehingga 5 + m R 3 R ω5 + m R
ω5 + m R0
adalah sama( maka:ω#rah 5 dam
ω5 + m R0
ωatau 5 + I +ωkarena
maka : 5 + m R0 5 + I
Momentum sudut sebuah partikel( relatif terhadap titik tertentu adalah besaran 3ektor( dan secara 3ektor ditulis:
3*× P + m )R×5 + R Bila diturunkan( men&adi: R × + ,τkarena
+τmaka
5( danΣ#pabila suatu sistem mula'mula
mempunai memontum sudut total 5O( setelah beberapa "aktu(Σsistem mempunai
momentum sudut total akhir maka berlaku hukum kekekalan momentum sudut. Perhatikan seorang penari balet ang menari sambil
berputar dalam dua keadaan ang berbeda. Pada keadaan pertama( penari merentangkan tangan mengalami putaran ang lambat( sedangkan pada keadaan kedua( penari bersedekap tangan rokna berkibar'kibar
dengan putaran ang cepat.
momentum sudut total a"al + momentul sudut total akhir
5OΣ5 +Σ
5 / 50 + 5O / 50O
;ukum Kekekalan momentum rotasi sebagai berikut.
0 +ω / I0ωI 0OωO / I0OωIO D. 8nergi Kinetik Rotasi
Misalkan sebuah sistem terdiri atas dua partikel ang massana m dan m0 dan rotasi bergerak dengan kecepatan linier 3 dan 30( maka energi kinetik partikel ke adalah 9 m30. ?leh karena itu( energi kinetik sistem dua partikel itu
adalah )energi kinetik partikel ke 0 adalah 9 m0300 * :
8K + 9 m 30 / 9 m0300
Dalam sistem benda tegar energi kinetikna: 9 mi 3i0Σ8K +
(ωBenda tegar ang berotasi terhadap suatu sumbu dengan kecepatan sudut . Ri ( di mana Ri adalah &arak ωkecepatan tiap partikel adalah 3i + partikel ke sumbu rotasi.
9 mi3i0Σ &adi 8K + 0ω 9 mi Ri0 Σ+ 0ω mi Ri0* Σ+ 9 ) 0ω8K + 9 I . ωkarena 5 + I . ωmaka 8K + 9 5 . atau 8K + 9
Masalah umum di mana benda tegar berotasi terhadap sebuah sumbu ang melalui pusat massana dan pada saat ang sama bergerak translasi relatif terhadap seorang pengamat. Karena itu( energi kinetik total benda dapat dituliskan sebagai berikut.
0ω8K + 9 m30 / 9 I .
Dalam hal ini hukum kekekalan energi total atau energi mekanik adalah:
8 + 8K / 8P + konstan
0 / mgh + konstanω9 m30 / 9 I ontoh %oal
%ebuah silinder pe&al homogen dengan &ari'&ari R dan massa m( ang berada di puncak bidang miring( menggelinding menuruni bidang miring seperti tampak pada gambar. Buktikanlah
kecepatan liniear pusat massa ketika tiba di dasar bidang miring adalah +
dengan menggunakan hukum kekekalan energi( dengan menggunakan hukum II dinamika
rotasi Penelesaian Aa"ab: + -ω3 + -( s h a. 8k / 8p + 8k0 / 8p0 00* / mgh0ω0* / mgh + ) 9 m300 / 9 I ω)9 m 30 / 9 I / / mgh + 9 m30 / 9 . 9 mR0 ) *0 / -gh + 9 30 / Q. R0 . 36r gh + S 30 30 + gh 3 + )terbukti*
;ukum II dinamika rotasi N , + m . a m g . 1 9 m . a + m . a + a a + . 30 + 3o0 / 0 a s 30 + -0 / 0. . s 30 + gh 3 + )terbukti* 8. Menggelinding
Menggelinding adalah gabungan dari gerak translasi )titik pusat massa* dan gerak rotasi )penampang bentuk lingkaran*.
, , f f
Penelesaian kita tin&au dari masing'masing gerakan itu.
Bila gaa , berada tepat di sumbu: 1 gerak translasi berlaku : , 1 f + m . a
α 1 gerak rotasi berlaku : f . R + I . + *αdi mana )
Bila gaa , berada di titik singgung : 1 gerak translasi berlaku : , / f + m . a
+ *α )α 1 gerak rotasi berlaku : ), 1 f* . R + I . Katrol
%umbu dianggap licin tanpa gesekan Massa + m
Aari'&ari + R
Momen kelembaman + I Gerak translasi beban : , + m . a
/ T 1 mg + ma FFFFFFF.)i* / m0g 1 T0 + m0a FFFFFFF.)ii* Gerak rotasi katrol :
α + I . τ
)T0 1 T* R + I FFFFFF.)iii* Pada puncak bidang miring
Gerak translasi beban : , + m . a
1 f + ma FF.)i*θ/ T 1 mg sin / m0g 1 T0 + m0a FFFFFFF..)ii* Gerak rotasi katrol :
α + I . τ
)T0 1 T* R + I FFFFFFFF)iii* %
atu u&ung talina terikat pada sumbu katrol Gerak translasi beban :
, + m . a
mg 1 T + m . a FFFFF..)i* Gerak rotasi katrol :
α + I . τ
T . R + I . FFFFF..)ii* ontoh %oal
C.Pesa"at #t"ood seperti pada gambar( terdiri atas katrol silinder ang masana kg
)dianggap silinder pe&al*. Masa m dan m0 masing' masing E kg dan > kg. &ari' &ari katrol + E- cm. Tentukan: a. percepatan beban( b. tegangan tali Penelesaian: a. Tin&au benda m N , + m . a " 1 T + m . a E . - 1 T +E . a T + E- 1 Ea Tin&au benda m0: N , + m0 . a T0 1 =0 + m0 . a T0 1 >.- + > . a T0 + >- / >a Tin&au katrol ∝N + I . T . R 1 T0 . R + 9 m . R0 a6R T 1 T0 + 9 . . 0 E- 1 Ea 1 >- 1 >a + 0a 0- + - . a a + 0 m6s0 T + E- 1 E . 0 + - ! T0 + >- / > . 0 + > ! 0.
Pesa"at #t"ood seperti pada gambar( terdiri dari katrol silinder ang licin tanpa gesekan Aika m + E- kg dan m0 + 0-- kg ( g + -m6det0
#ntara balok m dan bidang datar ada gaa gesek dengan + -(. massa katrol - kg. hitunglah:
percepatan sistem( gaa tegang tali Penelesaian: a. Tin&au m: N , + m . a T 1 f + m . a k . ! + m . aµTi 1 Ti 1 -( . m . g + m . a T 1 -( E- . - + E- . a T + E- / E-a Tin&au m0: N , + m . a "0 1 T0 + m0 . a m0 . g 1 T0 + m0 . a 0-- . - 1 T0 +0-- . a T0 + 0--- 1 0-- . a Tin&au katrol: ∝N + I . T0 . R 1 T . R + 9 m . r0 . a6R T0 1 T + 9 m . a 0--- 1 0--a 1 E- 1 E- a + 9 . - . a HE- + 0EE a a + + @(E m6s0 b. T + E- / E- . @(E + >0(E ! T0 + 0--- 1 0-- . @(E + @- !
Dua buah benda ang massana m dan m0 dihubungkan dengan seutas tali melalui sebuah katrol bermassa M dan ber&ari'&ari R seperti ditun&ukkan pada gambar. Permukaan me&a
licin. Tentukan percepatan masing' masing benda bila:
katrol dapat dianggap licin sehingga tali meluncur pada katrol
katrol cukup kasar sehingga ikut berputar dengan tali
katrol cukup kasar sehingga ikut berputar dengan tali Penelesaian: k + -*( T + T0 + Tµkatrol licin ) Tin&au m : N , + m . a T + m . a T + > . a Tin&au m0 : N , + m . a "0 1 T + m0 . a m0 . g 1 T + m0 . a E . - 1 T + E . a T + E- 1 Ea T + T >a + E- 1 Ea >a / Ea + Ca + E-a + + (0E 0 katrol kasar Katrol : ∝N + I . T0 . R 1 T . R + 9 mk . R0 . a6r E- 1 Ea 1 >a + 9 . . a E- + 9 a / Ca + C(E a a + E-6C(E + E(CC 0
+ >-U. KoefisienθBidang miring dengan sudut kemiringan gesek -(0. <&ung bidang miring diperlengkapi katrol dengan massa -- gram. Aari' &ari - cm )dianggal silinder pe&al*. <&ung tali di atas bidang miring diberi beban kg. <&ung tali ang tergantung 3ertikal diberi beban dengan massa - kg. Tentukanlah percepatan dan tegangan tali sistem tersebut
Penelesaian: Tin&au m N , + m . a T 1 fk 1 " sin >- + m . a k . ! 1 m g sin >- + m . aµT 1 k . m . g . cos >- 1 m . g sin >- + m . aµT 1 T 1 -(0 . . - . 9 1 . - . 9 + . a T 1 1 0- + a T + 0(H0C / a Tin&au m0 N , + m . a "0 1 T0 + m0 . a "0 . g 1 T0 + m0 . a - .- 1 T0 + - .a T0 + -- 1 -a ∝Tin&au katrol N + I . T0 . R 1 T . R + 9 m . R0 . a6R -- 1 -a 1 0(H0C 1 a + 9 . -( . a -- 1 0(H0C + -(>a / -a / a @>(-@0 + (> a a + E( m6s0 T + 0(H0C / . E( T + @(>0C ! T0 + -- 1 - . E( + H !
Balok # ditarik oleh pemberat B dengan cara seperti pada gambar. Koefisien gesekan antara balok # dengan lantai + -(E . Aika massa # + m(
massa B + >m. Massa tali dan katrol diabaikan dan percepatan gra3itasi g.
Tentukan:
gaa tarik oleh tali percepatan B
Penelesaian:
=aktu sama( &arak ang ditempuh # adalah 07 &arak tempuh B berarti
s# + 0 sB atau a# + 0 aB Tin&au benda # "B 1 0T + mB . aB >mg 1 0T + >m aB aB + Tin&au benda B T 1 f + m# a#
2m 3m a m 2a a X Y T 1 -(E !B + m . a# T 1 -(E m g + m a# a# +
gaa tarik oleh tali %ubstitusi a# + 0 aB + 0 )* > T m 1 (E m0 g + m0 g 1 T m : m T + percepatan B aB + + + + aB + g
Kesetimbangan Benda Tegar
Kesetimbangan adalah suatu kondisi benda dengan resultan gaa dan resultan momen gaa sama dengan nol.
Kesetimbangan biasa ter&adi pada :
Benda ang diam )statik*( contoh : semua bangunan gedung( &embatan( pelabuhan( dan
lain'lain.
Benda ang bergerak lurus beraturan )dinamik*( contoh : gerak meteor di ruang hampa( gerak kereta api di luar kota( elektron mengelilingi inti atom( dan lain'lain.
Benda tegar adalah benda ang tidak berubah bentukna karena pengaruh gaa dari luar.
Kesetimbangan benda tegar dibedakan men&adi dua:
Kesetimbangan partikel Kesetimbangan benda Kesetimbangan Partikel
Partikel adalah benda ang ukuranna dapat diabaikan dan hana mengalami gerak translasi )tidak mengalami gerak rotasi*.
,7 + - )sumbu *Σ ◊, + -Σ%arat kesetimbangan partikel
SOAL
. Dengan menetapkan arah keluar bidang kertas sebagai arah V positif dengan 3ektor satuan k ( maka torsi total ang beker&a pada batang terhadap poros ? )lihat gambar*
adalah . . .
#. /k m ! D. '0k m ! B. 1 k m ! 8. /Ek m ! . /0k m !
0. Berikut ini pernataan tentang faktor 1 faktor gerak rotasi :
)* Kecepatan sudut )0* 5etak sumbu rotasi )>* Bentuk benda )* Massa benda
,aktor 1 faktor ang mempengaruhi besar momen inersia adalah . . .
A. (1), (2), (), dan (!) B. )*( )0*( dan )>* . )*( )>*( dan )* D. )0*( )>*( dan )* 8. )0* dan )*
>. Perhatikan gambar berikut. Tiga buah pertikel dengan masa m( 0m( d a n >m
dipasang pada u&ung kerangka ang massana diabaikan. %istem terletak pada bidang XY . Aika sstem diputar terhadap
sumbu Y ( maka momen inersia sistem adalah
. . .
#. Ema D. ma2
B. @a ". #ma2
37o g 2 kg T2 T1 B A M = 4 kg
. %ekeping papan berbentuk cakram )silinder* diberi poros tanpa gesekan tepat pada pusatna( sehingga papan dapat berputar
mengitari porosna. #u mendorong tepi papan dengan sudut >@o )sin >@o + -(* terhadap arah tangensial papan )lihat gambar*. Begitu papan berputar( #u berlari mengikuti papan dan terus mendorong dengan gaa konstan. Papan mula 1 mula berada pada keadaan diam. Papan memiliki massa M ( &ari
1 &ari R( dan momen inersia 60M R2. Aika
papan menempuh satu putaran lengkap dalam "aktu T ( gaa dorong #u adalah . . .
#. 2πMR 5T 2 D. 2 MR 5πT 2 B. 5πMR 2T 2 8. 2 M R2 5πT . 5 MR 2πT 2
E. %uatu batang tipis dengan pan&ang L dan massa m dapat berputar pada sumbu ang terletak di
u&ung batang. Pada a"alna( batang berada pada posisi horiWontal dan kemudian dilepas.
Pada saat batang membuat sudut θ dengan
arah 3ertikal( percepatan sudut rotasi batang adalah . . . A. Lg D. 3gcosθ L B. 3gsinθ 2 L 8. 6g Lcosθ . 6g Lsinθ
. %ebuah bola pe&al bermassa M dan &ari 1 &ari R menggelinding menuruni sebuah bidang
miring dengan sudut kemiringan θ terhadap
arah mendatar. Percepatan bola adalah . . . #. 2 5 gsinθ D. gsinθ B. 3 7 g sinθ 8. 7 5 g sinθ $. 5 7 gsinθ
@. Pada gambar di ba"ah(C adalah roda katrol
dan massa beban B lebih besar daripada
massa beban A. Aika percepatan gra3itasi +
- m6s0 dan tegangan tali T
1 + 0E !(
tegangan tali T 2 adalah . . .
#. 0C ! D. 00 ! B. 0 ! ". 2% & . 0 !
C. Pada gambar berikut( roda katrol pe&al C
T
C
h
Poros
m 2m
Massa roda C adalah >-- gram. Aika
percepatan gra3itasi adalah - m6s0( tegangan tali T adalah . . .
#. ! D. >(> ! B. 1,' & 8. ! . 0 !
H. %ebuah bola sepak( massa M ( &ari 1 &ari R( dan
momen inersia 2 3 M R
2
menggelinding menuruni suatu bidang miring dari ketinggian
h )lihat gambar*. Aika percepatan gra3itasi
adalah g ( kela&uan bola sepak di dasar bidang
adalah . . . A. √ 2gh D.
√
6gh 5 B.√
3gh 2 8.√
4gh 3 . 10gh 7-. %ebuah bola pe&al menggelinding dari keadaan diam menuruni suatu bidang miring ang membentuk sudut >-o terhadap arah
mendatar. Kela&uan linear bola ketika telah menempuh lintasan se&auh >(E m pada bidang adalah . . .
#. m6s D. > m6s B. ' ms 8. 0 m6s . m6s
. Berapakah kecepatan sudut sebuah silinder pe&al pada dasar bidang miring( sehingga
silinder dapat menggelinding sampai ke puncak bidang ang memiliki pan&ang -(- m
dan tinggi >(-- m$ )Massa silinder adalah 0(-- kg dan &ari'&ari -(--*.
#. H(E rad6s D. 0C( rad6s B. 1', rads 8. >0( rad6s . 0(@ rad6s
0. %ebuah batang tipis dengan pan&ang -(-meter diberi poros pada pusatna dan poros ditempelkan pada dinding( sehingga batang bebas berotasi se&a&ar terhadap bidang dinding. Di u&ung'u&ung batang terpasang balok'balok kecil bermassa m dan 0m.
#nggap sistem dibebaskan dari keadaan diam dari posisi horiWontal )lihat gambar*. Balok 0m akan mengaun ke ba"ah. Kela&uan linear
balok 0m ketika mencapai titik terendah
adalah )abaikan massa batang dan ambil g + - m6s0* . . .
#. 1,% ms D. ( m6s B. (0 m6s 8. (C m6s . ( m6
6 kg 3 kg 3 m/s 2 m/s 1 m 2 m v
>. Dua silinder P danQ berotasi pada porosna
masing' masing dengan kecepatan sudut ω p
dan ωq denganω p : ωq + : 0. Momentum
sudut P dan Q masing'masing adalah L p dan
Lq dengan L p : Lq + 0 : >. Berapakah nilai
perbandingan energi kinetik P terhadap energi
kinetikn Q$ #. 1 6 D. 4 3 B. 1 3 8. 3 2 . 1 4
. Dua benda sedang bergerak seperti ditun&ukkan pada gambar. Besar momentum sudut total terhadap titik asal O( dalam satuan
kgm0s'( adalah . . .
#. - D. 0
B. 8.
>-.
E. %ebuah cakram horiWontal dengan inersia I 1
berputar dengan kecepatan sudut ω0 terhadap
suatu poros 3ertikal tanpa gesekan. akram kedua dengan momen inersia I 2 dan mula'
mula tidak berputar( &atuh pada permukaan cakram pertama. Karena permukaan kasar( kedua cakram akhirna mencapai kela&uan sudut ang sama ω. !ilai perbandingan
ω ω0 adalah . . #. I 1 I 2 D. I 2 ( I 1+ I 2) B. I 2 I 1 8. I 1 I 2 ( I 1+ I 2) . I 1 ( I 1+ I 2)
. %ebuah cakram mendatar berputar bebas terhadap suatu sumbu 3ertikal dan membuat H- putaran per menit. %epotong kecil dempul dengan massa 0(- 7 -'0 kg &atuh 3ertikal dan menempel pada cakram dengan &arak E(- 7 -' 0 m dari poros. Aika banak putaran per menit berkurang men&adi C-( momen inersia cakram
)dalam kg cm0* adalah . . .
#. 0(- D.
E(-B. >(- 8.
(-$. !,%
@. %ebuah balok bermassa m berotasi dalam
suatu lingkaran dengan &ari'&ari R1 dengan
kela&uan v1( pada suatu permukaan me&a
mendatar tanpa gesekan. Balok diikat pada seutas tali ang melalui suatu lubang pada me&a )lihat gambar*. Tidak ada gesekan antara me&a dan tali. <&ung tali di ba"ah me&a ditaik ke ba"ah sehingga setelah penarikan balok berotasi dalam suatu lingkaran dengan &ari'&ari
R2 dengan kela&uan v2. !ilai perbandingan
tegangan tali sesudah dan sebelum penarikan tali adalah . . . #. R1 R2 D.
(
R1 R2)
4 B.(
R 1 R2)
2 ".(
R 2 R1)
2T S Q R w P X A B 30o m M M E A D C 30o .
(
R 1 R2)
3 C.Gambar di atas menun&ukkan sebatang kau berat diengselkan di P . <&ung kau Q
didukung oleh seutas ka"at ang diikat pada dinding di P . Berat kau adalah * dan
tegangan dalam ka"at adalah T. #rah gaa pada kau di P adalah sepan&ang . . .
#. PQ D. SP
B. QP 8. SR
. PS
H. %istem pada gambar berikut ini berada dalam keadaan seimbang. Berat balok # adalah -- ! dan koefisien gesekan statis antara balok # dan me&a adalah -0(0. Berat balok B adalah . . .
#. 0-X0 ! D. -X0 ! B. 0-X> ! ". !%+ & . - !
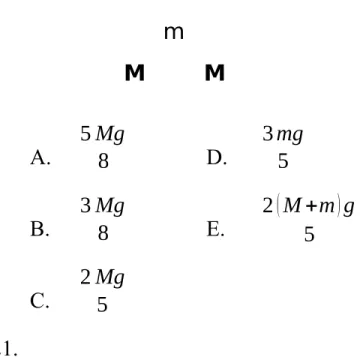
0-. Tiga buah bola masing'masing ber&ari'&ari >-cm( >- >-cm( dan 0- cm disusun seperti pada gambar dengan bola kecil berada diatas kedua bola besar. Massa bola kecil sebesar m( massa
bola besar masing'masing M ( percepatan
gra3itasi g . Besar gaa ang diker&akan oleh
salah satu bola besar pada bola kecil adalah . . . #. 5 Mg 8 D. 3mg 5 B. 3 Mg 8 8. 2( M +m)g 5 . 2 Mg 5 0.
Pada gambar sistem katrol( benda A dan E
masing'masing -- ! dan - !. #pabila tali
AC horiWontal dan tali AB se&a&ar bidang( serta
bidang miring dan katrol licin( maka sistem seimbang untuk berat D sebesar . . .
#. E-(E ! D. @0(E ! B. ',' & 8. C(E ! . 0(E !
00. %umbu kedua roda depan dan sumbu kedua roda belakang sebuah truk ang bermassa >--- kg ber&arak > m. Pusat massa truk terletak 0 m di belakang roda depan. Diandaikan percepatan gra3itasi Bumi adalah - m6s0. Beban ang dipikul oleh kedua roda depan truk itu sama dengan . . .
#. E--- !e"ton B. 1% %%% &e*ton . E --- !e"ton D. 0- --- !e"ton
M P Q R Papa B!"a #$%&mp&kka #$ s$$ 8. 0E --- !e"ton
0>. %uatu pipa seragam dengan pan&ang 0- m dan massa 0- kg disangga oleh penumpu pada salah satu titik di pipa tersebut. Ketika u&ung kiri pipa diberi beban - kg dan titik tumpu berada pada &arak 0 m dari tengah pipa(
tentukan massa beban ang harus diberikan pada u&ung kanan pipa agar ter&adi
keseimbangan.
#. - kg D. - kg
B. 2% kg 8. E- kg
. >- kg 0.
Gambar diatas menun&ukkan sebuah beban bermassa M ditopang oleh seutas ka"at PR
dan sebuah batang ringan QR ang diberi
engsel pada Q. %usunan ini dapat diubah
dalam cara'cara ang didaftar berikut ini( tetapi dalam tiap kasus batang QR tetap
horiWontal.
)* Meningkatkan pan&ang batang dan ka"at( dengan P dan Q tetap pada posisi asalna
dan massa terletak di u&ung batang.
)0* Meningkatkan pan&ang ka"at dan memindahkan P ke atas( dengan men&aga
pan&ang batang konstan.
)>* Meningkatkan M ( sedangkan ukuran'
ukuran lainna di&aga konstan.
Manakah dari perubahan di atas ang dapat menebabkan peningkatan tegangan dalam ka"at PR$ #. )>* sa&a B. )* dan )0* sa&a $. (1) dan () saa D. )0* dan )>* sa&a 8. )*( )0*( dan )>*
0E. %ebuah papan kau pan&ang L + >(- m( massa m + C- kg diam pada dua penumpu )lihat
gambar*. Penumpu kedua berada pada &arah >6 L dari u&ung kiri papan. Juli ingin
meletakkan sebuah beban bermassa M +
>--kg di sisi kanan papan se&auh mungkin tanpa papan terguling. Berapa &auh di kanan penumpu kedua( beban itu harus diletakkan$
#. -(0- m D. %,!% m B. -(0E m 8. -(E- m . -(>- m
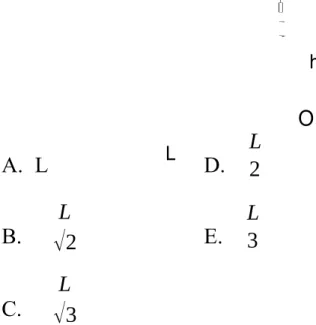
0. %ebuah toko memasang papan nama bermassa m ang digantung pada u&ung sebuah batang dengan pan&ang 5 dan massana dapat diabaikan. Batang ini disandarkan pada dinding took dengan engsel pada poros ?. Batang ditahan mendatar oleh seutas ka"at ang merentang dari titik tengah batang ke dinding( pada ketinggian h di atas engsel )lihat gambar*. Aika ka"at akan putus ketika tegangan T mencapai Tmaks 1 >mg( maka ketinggian minimum hmin di mana ka"at harus dipasang ke dinding adalah . . . ..
#. 5 D. L2 B. √ L2 8. L 3 . √ L3 O h L
0@. %atu u&ung dari sebuah batang homogen pan&ang (- m( ditopang oleh seutas kabel. <&ung lainna bersandar pada dinding di mana batang ditahan di tempatna oleh gesekan )lihat gambar*. Koefisien gesekan statis antara dinding dan batang adalah us +
-(E-. Aarak minimum( 7( dan titik # di mana suatu berat tambahan " )sama dengan berat batang* dapat digantung tanpa menebabkan batang tergelincir pada titik # adalah . . .
#. 0(0 m D. 0(C m B. 0( m 8. >(- m . 0( M
0C. Batang bersandar pada dinding licin dan bertumpu pada lantai kasar( seperti gambar. Bila # + E m( B + m( maka koefisien gesekan di titik # pada saat batang tepat akan bergeser adalah . . . #. 1 8 D. 3 5 B. 2 8 8. 4 5 . 3 8
0H. %eseorang menaiki tangga homogen ang disandarkan pada dinding 3ertikal ang licin. Berat tangga >-- ! dan berat orang @-- !. Bila orang tersebut dapat naik se&auh > m sesaat sebelum tangga itu tergelincir( maka koefisien gesekan antara lantai dan tangga adalah . . .
#. -(>C D. -(E
B. %,! 8. -(CE
. -(C
>-. %ebuah batang bermassa kg dan pan&ang 0 m dihubungkan ke dinding oleh sebuah engsel dan ditopang oleh seutas tali mendatar )lihat gambar*. Aika g + - m6s0 dan sudut ang membentuk batang terhadap horiWontal( Y + >@Z )sin >@Z + -(*( besar tegangan dalam tali adalah . . . #. E- ! D. 0E ! B A 37 w x A C 4 m 5 m B A 37 w x licin kasar 4 m 3 m
B. !% & 8. 0- ! . >- !
>. %ebuah penggaris siku bergantung diam seperti ditun&ukkan pada gambar. Penggaris dibuat dari lembaran logam serbasama. 5engan ang satu pan&angna l cm( sedangkan lengan ang lain pan&angna 0 5 cm. Besarstem Y adalah . . .
#. (- D. %,2'
B. -(E- 8. -.E
.
-(->0. Beberapa kegiatan untuk menentukan titik berat sepotong karton dengan bantuan benang berbeban( aitu :
. menggantung benang berbeban bersama' sama karton pada lubang #(
0. menarik garis lurus a pada karton berimpit dengan benang(
>. menarik garis lurus b pada karton berimpit dengan benang(
. menggantungkan benang berbeban bersama' sama karton pada lubang B(
E. perpotongan a dan b adalah titik berat karton.
<rutan kegiatan ang benar agar titik berat karton dapat ditentukan adalah . . .
#. ( 0( >( ( E D. 1, !, 2, , ' B. ( 0( ( >( E 8. 0( >( ( ( E . 0( >( ( E(
>>. Gambar berikut ini adalah bidang homogen. #pabila V adalah titik berat dari luasan #BG;( dan V- adalah titik berat luasan #BD8,G( maka &arak V-Vadalah . . .
#. -(C cm D. 6,% -m B. (0 cm 8. -(- cm . (- cm
>. %ebuah bidang stem PR% tampak
seperti pada gambar. Tentukan letak titik berat benda tersebut terhadap sisi P . . .
A. 2, -m B. 0(>> cm . 0(0- cm D. 0E(> cm 8. E-(0 cm >E.
Dari gambar di atas( benda ang mengalami keseimbangan labil adalah . . .
#. dan / D. R dan % B. dan R 8. ( R( dan % . P dan %
>. Dua partikel bermassa m dan m0 terpisah pada &arak tetap r. Aika kedua partikel berotasi
L 2L A B C A B C D E F G H 8 cm 12 cm 5 cm 12 cm 5 cm 8 cm Q ! " 4# cm " Q !
terhadap poros ang melalui pusat massa kedua partikel tersebut dan tegak lurus terhadap garis ang menghubungkan kedua partikel( maka momen inersia sistem partikel ang dinatakan dalam u( di mana
u= m1m2 m1+m2 ( adalah . . . #. 1 2 u r 2 D. 0 u r2 B. u r2 8. 5 3u r 2 . 3 2u r 2