LOGIC CONTROLLER UNTUK MULTI-AREA AUTOMATIC
GENERATION CONTROL
LAPORAN TUGAS AKHIR
Oleh :
Arie Bagus Laksono
102116010
FAKULTAS TEKNOLOGI INDSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
OPTIMAL SUPERCONDUCTING MAGNETIC ENERGY
STORAGE MENGGUNAKAN INTERVAL TYPE-2 FUZZY
O
p
tima
l S
u
p
er
co
n
d
u
ct
in
g
M
a
g
n
et
ic E
n
er
g
y
S
to
ra
g
e
Me
n
g
g
u
n
ak
an
In
te
rv
a
l T
yp
e
-2
F
u
zz
y
Lo
g
ic C
o
n
tr
o
ller
U
n
tu
k
M
u
lti
-Are
a
A
utom
a
tic
G
en
er
a
tio
n
Co
n
tr
o
l
A
ri
e Ba
g
u
s L
ak
so
n
o
1
0
2
1
1
6
0
1
0
LOGIC CONTROLLER UNTUK MULTI-AREA AUTOMATIC
GENERATION CONTROL
LAPORAN TUGAS AKHIR
Oleh :
Arie Bagus Laksono
102116010
FAKULTAS TEKNOLOGI INDSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
OPTIMAL SUPERCONDUCTING MAGNETIC ENERGY
STORAGE MENGGUNAKAN INTERVAL TYPE-2 FUZZY
LEMBAR PENGESAHAN
Judul Tugas Akhir
: Optimal Superconducting Magnetic Energy
Storage Berbasis Interval Type 2 Fuzzy logic
Controller untuk Multi-Area Automatic
Generation Control
Nama Mahasiswa
: Arie Bagus Laksono
Nomor Induk Mahasiswa
: 102116010
Program Studi
: Teknik Elektro
Fakultas
: Teknologi Industri
Tanggal Lulus Sidang Tugas Akhir
: 5 September 2020
Jakarta, 15 September 2020
MENGESAHKAN
Pembimbing I :
Nama : Dr. Eng Muhammad Abdillah S.T., M.T
NIP
: 116153
Pembimbing II :
Nama : Nita Indriani Pertiwi, M.T
NIP
: 116148
MENGETAHUI,
Ketua Program Studi Teknik Elektro
Dr. Eng. Wahyu Kunto Wibowo, S.T., M.Eng.
NIP 116059
ACC 15/09/2020
LEMBAR PERNYATAAN
ABSTRAK
Arie Bagus Laksono, 102116010. Optimal Superconducting Magnetic Energy Storage Berbasis
Interval Type 2 Fuzzy logic Controller untuk Multi-Area Automatic Generation Control.
Dalam pengoperasian sistem tenaga listrik, kestabilan sangat penting dalam menjaga dan menjamin kualitas daya listrik yang dikirim dari unit pembangkit hingga ke sisi konsumen melalui saluran transmisi. Jika terjadi perubahan beban pada sistem tenaga listrik, maka dapat mempengaruhi perubahan frekuensi pada aliran listrik yang dihasilkan oleh pembangkit yang juga berpengaruh pada frekuensi sistem selama proses pengoperasian, maka dari itu dibutuhkan suatu skema sistem kontrol yang disebut Automatic Generation Control (AGC). Dalam suatu sistem interkoneksi, AGC berfungsi sebagai sistem yang mempertahankan frekuensi di titik nominal. Namun sistem pengontrol primer pada AGC memiliki nilai osilasi yang tinggi dan cenderung memiliki respon lambat. Untuk mengatasi permasalahan tersebut digunakan teknologi penyimpanan energi bernama
Superconducting Magnetic Energy Storage (SMES) yang dapat mengontrol daya aktif dan reaktif
pada sistem dengan kemampuan charge dan dischargenya. Sistem dapat dipasang pada masing-masing area sistem AGC. Usaha untuk menjaga agar sistem tetap adaptif ketika terjadi perubahan nilai beban, yaitu dengan ditambahkan suatu sistem kontrol pada sistem kendali SMES. Tugas akhir ini merepresentasikan penggunaan Interval Type-2 Fuzzy Logic Control dalam mentuning input SMES untuk menghasilkan desain kontrol yang optimum pada sistem tenaga listrik. Hasil simulasi menunjukkan bahwa pengaplikasian metode ini mampu memberikan pengaruh yang bagus pada sistem, yaitu dapat mereduksi overshoot dan undershoot serta mempercepat settling time respon deviasi frekuensi area 1, deviasi frekuensi area 2, dan perubahan daya tie line.
Kata Kunci : Superconducting Magnetic Energy Storage (SMES), Multi-Area Automatic Generation
ABSTRACT
Arie Bagus Laksono, 102116010. Optimal Superconducting Magnetic Energy Storage Based on Interval Type 2 Fuzzy logic Controller for Multi-Area Automatic Generation Control.
In power system operation, stability is very important for maintaining and guaranteeing the quality of electric power sent from the generating unit to the consumer side through the transmission line. If there is a change in the load on the electric power system, it can affect the frequency change in the electricity generated by the generator which also affects the system frequency during the operation process. Therefore, a control system scheme called Automatic Generation Control (AGC) is needed. In an interconnection system, AGC functions as a system that maintains frequency at a nominal point. However, the primary control system at AGC has high oscillation values and tends to have a slow response. To solve this problem, an energy storage technology called Superconducting Magnetic Energy Storage (SMES) is used which can control active and reactive power in the system with charge and discharge capabilities. The system can be installed in each area of the AGC system. To keep the system adaptive when the load value changes, a control system is added to the SMES control system. This final project represents the use of the Interval Type-2 Fuzzy Logic Control for tuning the SMES input to produce the optimum control design in the electric power system. The simulation results show that the application of this method is able to have a good effect on the system, which can reduce overshoot and undershoot, and then accelerate the settling time response to area 1 frequency deviation, area 2 frequency deviation, and tie line power changes.
Key Word : Superconducting Magnetic Energy Storage (SMES), Multi-Area Automatic Generation
KATA PENGANTAR
Assalamualaikum Wr.Wb.Dengan memanjatkan puji syukur ke hadirat Allah SWT atas Rahmat dan Hidayah-Nya sehingga Laporan Tugas Akhir dengan judul OPTIMAL SUPERCONDUCTING MAGNETIC
ENERGY STORAGE BERBASIS INTERVAL TYPE 2 FUZZY LOGIC CONTROLLER UNTUK MULTI-AREA AUTOMATIC GENERATION CONTROL akhirnya dapat penulis susun dan
selesaikan. Penulisan laporan Tugas Akhir ini dimaksudkan sebagai syarat menyelesaikan program sarjana di Program Studi S1 Teknik Elektro, Fakultas Teknologi Industri, Universitas Pertamina.
Laporan Tugas Akhir ini dapat diselesaikan berkat bantuan dan dukungan dari berbagai pihak yang telah memberikan gagasan, bimbingan, dan berbagai upaya lainnya. Pada kesempatan ini penulis mengucapkan terima kasih kepada :
1. Kedua Orang Tua : Abdul Djalil dan Winarti yang telah memberikan segala dukungan. 2. Bapak Dr. Eng. Muhammad Abdillah, S.T., M.T., selaku Dosen Pembimbing dan Dosen
Teknik Elektro yang telah membimbing penyelesaian Tugas Akhir.
3. Ibu Nita Indriani Pertiwi, M.T., selaku Dosen Pembimbing dan Dosen Teknik Elektro yang telah membimbing penyelesaian Tugas Akhir.
4. Bapak Dr. Eng. Wahyu Kunto Wibowo, M.T., selaku Dosen Wali dan Ketua Program Studi Teknik Elektro.
5. Bapak Prof. Akhmaloka Ph.D sebagai Rektor Universitas Pertamina.
6. Bapak Prof. Dr. Ir. Ichsan Setya Putra sebagai Wakil Rektor 1 Bidang Akademik dan Kemahasiswaan Universitas Pertamina.
7. Bapak Prof. Ir. Suprihanto, Ph.D sebagai Dekan Fakultas Perencanaan Infrastuktur & Fakultas Teknologi Industri Universitas Pertamina
8. Seluruh Dosen Program Syudi Teknik Elektro Universitas Pertamina
9. Seluruh staff akademik dan administrasi Program Studi Teknik Elektro yang telah membantu penulis dalam pelaksanaan kegiatan Tugas Akhir ini.
10. Teman-teman satu angkatan dan seluruh mahasiswa Program Studi Teknik Elektro Universitas Pertamina
11. Sahabat seperjuangan SMA : Agyl Nur Fahrurrozi, Ninda Sriwardani, Inas Safina Bobsaid, Fitria Raamadhani, dan Irsyad Jamil.
12. Sahabat seperjuangan kuliah : Faizal Nur Yusuf, Lutvi, Fahmi Nur Sandy, Mujono, Ganang Alrian Wachid, Fathan Mujahid Satria dan Ahmad Rauhan.
Surabaya, 25 Agustus 2020 Penulis,
DAFTAR ISI
LEMBAR PENGESAHAN ... i LEMBAR PERNYATAAN... ii ABSTRAK... iii ABSTRACT ... iv KATA PENGANTAR ... v DAFTAR ISI ... viDAFTAR GAMBAR ... viii
DAFTAR TABEL ... xi BAB I. PENDAHULUAN... 1 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 2 1.3 Batasan Masalah ... 2 1.4 Tujuan Perancangan ... 2 1.5 Manfaat Perancangan ... 2 1.6 Waktu Perancangan ... 3
BAB II. TINJAUAN PUSTAKA ... 4
2.1 Automatic Generation Kontrol (AGC) ... 4
2.1.1 Konsep Respon Generator terhadap Perubahan Beban ... 5
2.1.2 Konsep Pengaruh Beban Terhadap Frekuensi ... 7
2.1.3 Konsep Pengaturan Valve dengan Governor ... 7
2.1.4 Pemodelan Sistem Turbin ... 8
2.1.5 Pemodelan Sistem Automatic Generation Kontrol (AGC) ... 9
2.2 Superconducting Magnetic Energy Storage (SMES) ... 9
2.3 Interval Type-2 Fuzzyl logic controler (IT2FLC) ... 10
2.3.1 Fuzzifikasi ... 11
2.3.2 Rule Base ... 12
2.3.3 Inferensi ... 13
2.3.4 Tipe Reduksi ... 13
2.3.5 Defuzzifikasi ... 14
2.4 Indeks Performansi Eror ... 14
2.5 Respon Transien ... 15
BAB III. KONSEP PERANCANGAN ... 16
3.2 Pertimbangan Perancangan ... 17
3.2.1 Model Linear Multi-Area AGC ... 17
3.2.2 Pemodelan Dynamic Sistem SMES ... 19
3.2.3 Pemodelan IT2FLC ... 20
3.2.4 Standar Perubahan Frekuensi ... 38
3.3 Analisa Teknis ... 39
3.4 Peralatan dan Bahan ... 39
3.5 Metode Analisa Data ... 39
BAB IV. KONSEP PERANCANGAN ... 40
4.1 Pendahuluan ... 40
4.2 Simulasi Sistem ... 41
4.3 Data Parameter Sistem ... 45
4.4 Analisis Hasil Simulasi ... 47
4.4.1 Studi Kasus 1 ... 47
4.4.2 Studi Kasus 2 ... 58
4.4.3 Studi Kasus 3 ... 67
BAB V. KESIMPULAN DAN SARAN ... 75
5.1 Kesimpulan ... 75
5.2 Saran ... 75
DAFTAR GAMBAR
Gambar 2. 1 Diagram Skematik AGC dan AVR pada Generator Sinkron ... 4
Gambar 2. 2 Hubungan Kecepatan dengan Torsi ... 5
Gambar 2. 3 Hubungan Perubahan Daya dengan Kecepatan ... 6
Gambar 2. 4 Blok Diagram Sistem Beban ... 7
Gambar 2. 5 Penyederhanaan Blok Diagram Sistem Beban ... 7
Gambar 2. 6 Mekanisme Governor pada Sistem Pembangkit ... 8
Gambar 2. 7 Blok Diagram Governor dengan Karakteristik Speed Drop ... 8
Gambar 2. 8 Blok Diagram Sederhana dari Steam Turbine ... 8
Gambar 2. 9 Blok Diagram AGC Satu Area ... 9
Gambar 2. 10 Circuit Diagram SMES ... 9
Gambar 2. 11 Mekanisme Kendali Type-2 Fuzzy Logic [13] ... 10
Gambar 2. 12 Membership Function IT2FLC... 11
Gambar 2. 13 Respon output dan error plant ... 12
Gambar 2. 14 Karakteristik respon transien ... 15
Gambar 3. 1 Flowchart Perencanaan Optimal SMES Berbasis IT2FPID untuk Multi-Area AGC . 16 Gambar 3. 2 Interkoneksi Sistem Tenaga Listrik Dua Area ... 17
Gambar 3. 3 Rangkaian Ekivalen Interkoneksi Sistem Tenaga Listrik Dua Area ... 17
Gambar 3. 4 Model Linear Interkoneksi Sistem Tenaga Listrik Dua Area ... 18
Gambar 3. 5 Blok Digaram Orde Satu Sistem SMES [17] ... 20
Gambar 3. 6 Blok Diagram Sistem IT2FLC ... 20
Gambar 3. 7 Respon Input 1 Fuzzy (f) ... 21
Gambar 3. 8 Respon Input 2 Fuzzy (df) ... 21
Gambar 3. 9 Respon Output Fuzzy (u) ... 22
Gambar 3. 10 Membership Function Fuzzt Type 1 Input (f) ... 23
Gambar 3. 11 Membership Function Fuzzt Type 1 Input (df) ... 23
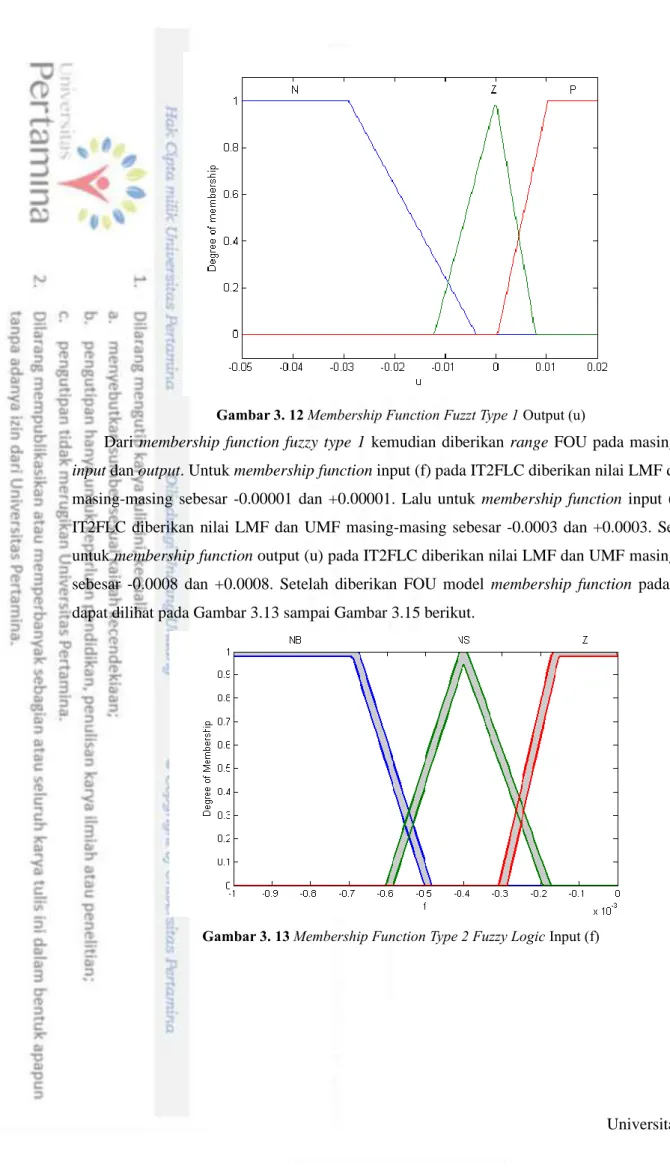
Gambar 3. 12 Membership Function Fuzzt Type 1 Output (u) ... 24
Gambar 3. 13 Membership Function Type 2 Fuzzy Logic Input (f) ... 24
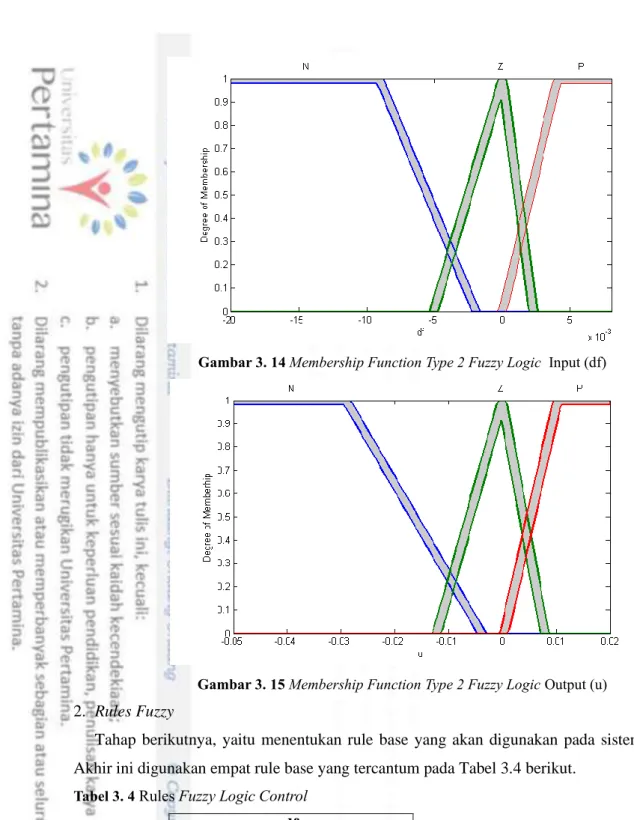
Gambar 3. 14 Membership Function Type 2 Fuzzy Logic Input (df) ... 25
Gambar 3. 15 Membership Function Type 2 Fuzzy Logic Output (u) ... 25
Gambar 3. 16 LMF Input 1 IT2FLC ... 26
Gambar 3. 17 LMF Input 2 IT2FLC ... 26
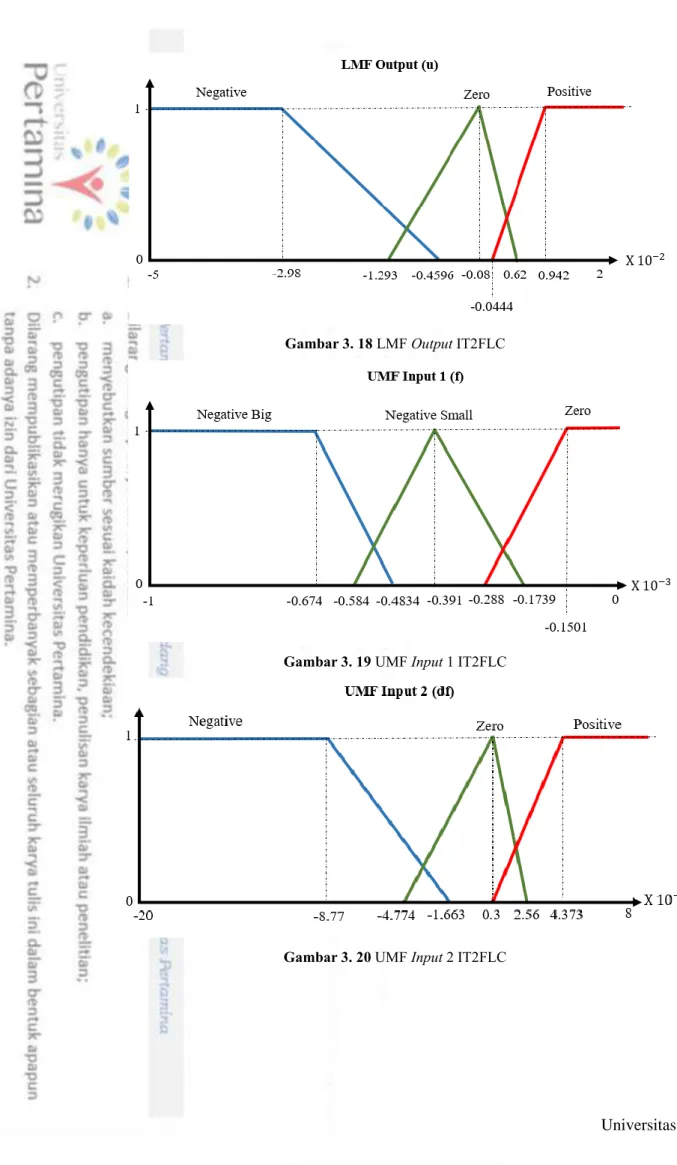
Gambar 3. 18 LMF Output IT2FLC ... 27
Gambar 3. 19 UMF Input 1 IT2FLC ... 27
Gambar 3. 20 UMF Input 2 IT2FLC ... 27
Gambar 3. 21 UMF Output IT2FLC ... 28
Gambar 3. 22 Derajat Keanggotaan Input 1 LMF ... 28
Gambar 3. 23 Derajat Keanggotaan Input 2 LMF... 29
Gambar 3. 24 Derajat Keanggotaan Input 1 UMF ... 30
Gambar 3. 25 Derajat Keanggotaan Input 2 UMF ... 30
Gambar 3. 26 Inferensi Output LMF fuzzy ... 31
Gambar 3. 27 Inferensi Output UMF fuzzy ... 32
Gambar 3. 28 Output LMF ... 33
Gambar 3. 30 output IT2FLC menggunakan toolbox software MATLAB ... 38
Gambar 4. 1 Diagram Blok Perbandingan Sistem Multi-Area AGC Dengan Variasi Kontrol ... 41
Gambar 4. 2 Blok Diagram Multi-Area AGC Tanpa Kontroler ... 42
Gambar 4. 3 Blok Diagram Conventional Kontrol Multi-Area AGC ... 42
Gambar 4. 4 Blok Diagram Conventional Kontrol Multi-Area AGC dengan Kontrol Tambahan Berupa SMES ... 43
Gambar 4. 5 Blok Diagram Conventional Kontrol Multi-Area AGC + SMES Kontrol ... 44
Gambar 4.6 Blok Diagram Conventional Kontrol Multi-Area AGC (a) + SMES T1FLC (b) + SMES IT2FLC ... 45
Gambar 4. 7 Deviasi Frekuensi Area 1 ... 49
Gambar 4. 8 Deviasi Frekuensi Area 2 ... 49
Gambar 4. 9 Deviasi Daya Tie Line ... 49
Gambar 4. 10 Respon Frekuensi Area 1 dengan Kontroler Integral ... 50
Gambar 4. 11 Respon Frekuensi Area 2 dengan Kontroler Integral ... 51
Gambar 4. 12 Respon Daya Tie-Line Sistem dengan Kontroler Integral ... 51
Gambar 4. 13 Respon Frekuensi Conventional AGC Area 1 dengan Penambahan 1 SMES ... 52
Gambar 4. 14 Respon Frekuensi Conventional AGC Area 2 dengan Penambahan 1 SMES ... 52
Gambar 4. 15 Respon Daya Tie-Line Conventional AGC dengan Penambahan 1 SMES ... 53
Gambar 4. 16 Respon Frekuensi Area 1 Sistem Menggunakan TIFLC SMES dan IT2FLC SMES 54 Gambar 4. 17 Respon Frekuensi Area 2 Sistem Menggunakan TIFLC SMES dan IT2FLC SMES 54 Gambar 4. 18 Respon Daya Tie Line Sistem Menggunakan TIFLC SMES dan IT2FLC SMES ... 55
Gambar 4. 19 Grafik ITAE Studi Kasus 1 ... 56
Gambar 4. 20 Grafik ITSE Studi Kasus 1 ... 56
Gambar 4. 21 Grafik IAE Studi Kasus 1 ... 57
Gambar 4. 22 Grafik ISE Studi Kasus 1 ... 57
Gambar 4. 23 Deviasi Frekuensi Area 1 ... 59
Gambar 4. 24 Deviasi Frekuensi Area 2 ... 59
Gambar 4. 25 Deviasi Daya Tie Line ... 59
Gambar 4. 26 Respon Frekuensi Area 1 dengan Kontroler Integral ... 60
Gambar 4. 27 Respon Frekuensi Area 2 dengan Kontroler Integral ... 61
Gambar 4. 28 Respon Daya Tie-Line Sistem dengan Kontroler Integral ... 61
Gambar 4. 29 Respon Frekuensi Conventional AGC Area 1 dengan Penambahan 1 SMES ... 62
Gambar 4. 30 Respon Frekuensi Conventional AGC Area 2 dengan Penambahan 1 SMES ... 62
Gambar 4. 31 Respon Daya Tie-Line Conventional AGC dengan Penambahan 1 SMES ... 63
Gambar 4. 32 Respon Frekuensi Area 1 Sistem Menggunakan TIFLC SMES dan IT2FLC SMES 64 Gambar 4. 33 Respon Frekuensi Area 2 Sistem Menggunakan TIFLC SMES dan IT2FLC SMES 64 Gambar 4. 34 Respon Daya Tie Line Sistem Menggunakan TIFLC SMES dan IT2FLC SMES ... 65
Gambar 4. 35 Grafik ITAE Studi Kasus 2 ... 66
Gambar 4. 36 Grafik ITSE Studi Kasus 2 ... 66
Gambar 4. 37 Grafik IAE Studi Kasus 2 ... 66
Gambar 4. 38 Grafik ISE Studi Kasus 2 ... 67
Gambar 4. 39 Respon Frekuensi Conventional AGC Area 1 dengan Penambahan 2 SMES ... 68
Gambar 4. 40 Respon Frekuensi Conventional AGC Area 2 dengan Penambahan 2 SMES ... 68
Gambar 4. 41 Respon Daya Tie-Line Conventional AGC dengan Penambahan 2 SMES ... 68 Gambar 4. 42 Respon Frekuensi Area 1 Sistem Menggunakan TIFLC SMES dan IT2FLC SMES 70
Gambar 4. 43 Respon Frekuensi Area 2 Sistem Menggunakan TIFLC SMES dan IT2FLC SMES 70
Gambar 4. 44 Respon Daya Tie Line Sistem Menggunakan TIFLC SMES dan IT2FLC SMES ... 70
Gambar 4. 45 Grafik ITAE Studi Kasus 3 ... 72
Gambar 4. 46 Grafik ITSE Studi Kasus 3 ... 72
Gambar 4. 47 Grafik IAE Studi Kasus 3 ... 72
DAFTAR TABEL
Tabel 1. 1 Timeline Perancangan Tugas Akhir ... 3
Tabel 2. 1 Contoh Rule Base Fuzzy Satu Dimensi. ... 13
Tabel 2. 2 Contoh Rule Base Fuzzy Satu Dimensi Simetris ... 13
Tabel 3. 1 Membership Function Input 1 (f) Fuzzy ... 22
Tabel 3. 2 Membership Function Input 2 (df) Fuzzy ... 22
Tabel 3. 3 Membership Function Output (u) Fuzzy ... 23
Tabel 3. 4 Rules Fuzzy Logic Control ... 25
Tabel 3. 5 Batas Kerja Frekuensi Sistem Tenaga Listrik ... 38
Tabel 3. 6 Studi Kasus yang Akan Dianalisa ... 39
Tabel 3. 7 Daftar Peralatan ... 39
Tabel 4. 1 Data Parameter Sistem AGC Tanpa Kontroler ... 45
Tabel 4. 2 Data Parameter Kontrol Integral dan Karakteristik Respon Frekuensi pada AGC ... 46
Tabel 4. 3 Data Parameter Sistem SMES ... 46
Tabel 4. 4 Data Parameter Kontrol Optimal SMES ... 47
Tabel 4. 5 Data Performansi Grafik pada Gambar 4.7 sampai Gambar 4.9 ... 50
Tabel 4. 6 Data Performansi Grafik pada Gambar 4.10 sampai Gambar 4.12 ... 51
Tabel 4. 7 Data Performansi Grafik pada Gambar 4.13 sampai Gambar 4.15 ... 53
Tabel 4. 8 Data Performansi Menggunakan SMES T1FLC ... 55
Tabel 4. 9 Data Performansi Menggunakan SMES IT2FLC ... 55
Tabel 4. 10 Nilai Indeks Performansi Error pada Masing-Masing Sistem pada Studi Kasus 1 ... 57
Tabel 4. 11 Data Performansi Grafik pada Gambar 4.23 sampai Gambar 4.25 ... 60
Tabel 4. 12 Data Performansi Grafik pada Gambar 4.26 sampai Gambar 4.28 ... 61
Tabel 4. 13 Data Performansi Grafik pada Gambar 4.29 sampai Gambar 4.31 ... 63
Tabel 4. 14 Data Performansi Menggunakan SMES T1FLC ... 65
Tabel 4. 15 Data Performansi Menggunakan SMES IT2FLC ... 65
Tabel 4. 16 Nilai Indeks Performansi Error pada Masing-Masing Sistem pada Studi Kasus 2 ... 67
Tabel 4. 17 Data Performansi Grafik pada Gambar 4.13 sampai Gambar 4.15 ... 69
Tabel 4. 18 Data Performansi Menggunakan SMES T1FLC ... 71
Tabel 4. 19 Data Performansi Menggunakan SMES IT2FLC ... 71
BAB I. PENDAHULUAN
1.1 Latar Belakang
Dalam pengoperasian sistem tenaga listrik, kestabilan dan keandalan memainkan peran penting dalam menjaga dan menjamin kualitas daya listrik yang dikirim dari unit pembangkit hingga ke sisi konsumen melalui saluran transmisi. Untuk mencapai nilai pengoperasian yang optimum pada suatu sistem tenaga listrik, aliran daya yang dihasilkan oleh unit pembangkit harus seimbang dengan daya yang diserap oleh sisi konsumen atau beban. Jika terjadi perubahan beban pada sistem tenaga listrik, maka dapat mempengaruhi perubahan frekuensi pada aliran listrik yang dihasilkan oleh pembangkit yang juga berpengaruh pada frekuensi sistem selama proses pengoperasian [1]. Maka dari itu dibutuhkan suatu skema sistem kontrol yang disebut Automatic Generation Control (AGC). Dalam suatu sistem interkoneksi, AGC berfungsi sebagai sistem yang mempertahankan frekuensi di titik nominal, membagi aliran daya ke beban antara generator, dan mengontrol jadwal pertukaran daya dalam jaring sistem tenaga listrik [2].
Dalam beberapa penelitian, sistem AGC tidak lagi dapat melakukan kompensasi perubahan beban secara optimal karena respon AGC yang lambat. Hal tersebut dapat mengarah pada sistem penyimpanan frekuensi dan daya yang berada di antara area yang saling berhubungan atau sering disebut daya tie-line [3]. Seiring dengan berkembangnya teknologi penyimpanan energi, permasalahan respon pada AGC dapat direduksi oleh adanya teknologi bernama Superconducting
Magnetic Energy Storage (SMES) yang dapat mengontrol daya aktif dan reaktif [4]. Berdasarkan
kemampuan respon charge dan discharge dari SMES dalam menyimpan energi, maka dapat digunakan dalam menangani permasalahann di bidang kestabilan dinamis, yaitu seperti meredam osilasi daya maupun frekuensi pada sistem [5].
Perubahan daya pada jaring sistem tenaga mempengaruhi baik input maupun output dari SMES, maka dari itu diperlukan strategi kontrol yang tepat sehingga dapat mengendalikan sistem SMES agar lebih optimal dan adaptif ketika terjadi perubahan titik operasi pada jaring kelistrikan. Seiring dengan perkembangan metode kontrol, suatu sistem dapat dioptimalkan menggunakan analisis yang dibentuk dalam sejumlah aturan. Dengan mengkombinasikan sejumlah aturan yang telah ditetapkan, peraturan tersebut menjadi sebuah sistem yang disebut dengan metode Fuzzy Logic Control (FLC). Sampai saat ini FLC telah banyak diterapkan di seluruh dunia dan mengungguli sistem kontrol konvensional sebagai desain kontrol alternatif untuk variasi model sistem linear dan non linear [4,6]. Dalam beberapa kasus, Type-1 Fuzzy Logic Control (T1FLC) masih sering digunakan. Namun, T1FLC sendiri memiliki kemampuan yang terbatas dalam menangani ketidakpastian sistem yang kompleks. Dalam beberapa penelitian membuktikan mengenai performansi IT2FLC lebih baik [7,8]. Dari permasalahan itulah Prof. Lotfi Zadeh mengembangkan Interval Type-2 Fuzzy Logic Control (IT2FLC) pada tahun 1975. Namun metode IT2FLC populer pada awal tahun 2000 karena adanya sistem komputasi yang sudah memadai. Struktur pemodelan IT2FLC hampir sama dengan T1FLC,
hanya saja memiliki perbedaan pada hasil output setelah melalui proses inferensi, yaitu dilanjutkan ke proses reduksi untuk mengubah himpunan dari output IT2FLC ke T1FLC untuk kemudian dilakukan proses defuzzifikasi [9].
Penelitiann ini mengusulkan pemodelan sistem Multi-Area AGC dengan menggunakan SMES sebagai peredam osilasi dan mempercepat respon pada sistem menggunakan sistem kontrol Interval
Type-2 Fuzzy Control yang dirancang menggunakan software Simulink MATLAB.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah ditulis, maka didapatkan rumusan masalah, yaitu:
1. Bagaimana cara mendesain sistem kontrol Interval Type 2 Fuzzy Logic Control (IT2FLC) pada sistem SMES yang sesuai untuk output frekuensi dan daya tie-line pada sistem AGC?
2. Bagaimana hasil dari performansi sistem AGC setelah sistem kontrol SMES dipasang Interval
Type 2 Fuzzy Logic Control (IT2FLC)?
3. Bagaimana pengaruh pemasangan jumlah SMES pada sistem Multi-Area AGC?
1.3 Batasan Masalah
Berdasarkan rumusan masalah yang telah ditulis, maka pembatasan masalah yang dilakukan, yaitu :
1. Model matematika sistem Multi-Area AGC dengan semua parameter diasumsikan ideal . 2. Output yang dihasilkan, yaitu berupa grafik frekuensi dan daya tie-line hasil simulasi software
MATLAB.
3. Beban bersifat statis.
4. Parameter sistem kontrol T1FLC dan IT2FLC diperoleh menggunakan metode trial and error.
1.4 Tujuan Perancangan
Tujuan dilakukannya perancangan ini, yaitu :
1. Memodelkan sistem kontrol Interval Type-2 Fuzzy Logic Control (IT2FLC) pada SMES untuk memperbaiki redaman osilasi frekuensi dan daya tie pada sistem Multi-Area AGC.
2. Memperoleh nilai performansi ITAE, ITSE, IAE, dan ISE minimum dari sistem Multi-Area AGC dengan penambahan sistem SMES berbasis Interval Type-2 Fuzzy Logic Control (IT2FLC). 3. Mengevaluasi pemasangan jumlah SMES terhadap redaman osilasi frekuensi dan daya tie-line
sistem Multi-Area AGC.
1.5 Manfaat Perancangan
Manfaat dari dilakukannya penelitian ini, yaitu :
1. Mempercepat respon frekuensi pada sistem kendali AGC agar kembali ke titik operasi.
2. Meredam adanya osilasi daya maupun frekuensi pada sistem kendali Multi-Area AGC menggunakan sistem penyimpanan energi berupa SMES.
3. Sebagai salah satu desain acuan dalam pengembangan sistem SMES berbasis IT2FLC untuk sistem kendali Multi-Area AGC.
1.6 Waktu Perancangan
Waktu Pengerjaan Tugas Akhir dilakukan berdasarkan timeline yang tercantum pada Tabel 1.1 berikut.
Tabel 1. 1Timeline Perancangan Tugas Akhir
No Kegiatan Minggu Ke 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 1 Pendaftaran TA
2 Pembuatan Proposal TA
3 Pencarian referensi sistem multi area AGC dan SMES
4 Pemodelan single area AGC+SMES
5 Pemodelan single area AGC+SMES+FLC
6 Pencarian referensi IT2FLC
7 Desain single area
AGC+SMES+IT2FLC
8 Pemodelan multi area
AGC+SMES
9 Desain multi area
AGC+SMES+IT2FLC
10 Pembuatan Laporan
Studi Literatur
11
Desain multi area AGC+SMES+IT2FLC dengan Studi Kasus yang telah dirancang
12 Pembuatan Laporan
BAB II. TINJAUAN PUSTAKA
Pada bab ini dijelaskan mengenai teori dasar dan penurunan matematis dari sistem AGC, IT2FLC, dan SMES. Dijelaskan pula mengenai konsep dasar respon transien dan indeks performansi eror, yaitu Integral of Time by Absolute Error (ITAE), Integral of Time by Square Error (ITSE), Integral
of Absolute Error (IAE), dan Integral of Square Error (ISE)
2.1 Automatic Generation Kontrol (AGC)
Pada sistem pembangkit listrik baik itu pembangkit besar maupun kecil yang saling terhubung secara sinkron pada suatu sistem interkoneksi harus mempunyai nilai frekuensi yang sama. Seiring dengan adanya perubahan permintaan daya dan perubahan beban yang berubah-ubah setiap waktu, maka sangat penting bahwa suatu pembangkit listrik harus memiliki kemampuan untuk mengembalikan output secara cepat dari nol hingga beban maksimum. Akibat adanya perubahan beban yang berubah-ubah setiap waktu, maka dapat dikatakan bahwa frekuensi bukan termasuk besaran konstan, melainkan besaran yang selalu berubah-ubah secara kontinyu sehingga diperlukan adanya suatu sistem yang dapat mengontrol frekuensi pada sistem generator yang terdapat pada pembangkit listrik atau sering disebut sebagai sistem Automatic Generation Control (AGC). Prinsip kerja dari AGC adalah mempertahankan frekuensi pada nilai yang telah ditetapkan selama terjadi gangguan yang disebabkan adanya variasi beban selama sistem beroperasi. Pada Gambar 2.1 diperlihatkan skema diagram Automatic Generation Control (AGC) dan Automatic Voltage
Regulator (AVR) pada suatu generator sinkron.
(LFC) Load Frequency Control G v P c P tie P G P QG AVR Mekanisme kontrol katup Uap Turbin Sensor Frekuensi Sensor Tegangan Medan Generator Sistem Eksitasi
Gambar 2. 1Diagram Skematik AGC dan AVR pada Generator Sinkron
Dengan,
∆PG = Daya aktif generator
∆QG = Daya reaktif generator ∆PC = Kontrol kecepatan
∆PV = Kontrol valve / posisi gerbang
∆Ptie = Daya tie-line
Automatic Generation Kontrol (AGC)
Output generator yang terdapat pada suatu sistem pembangkit listrik, yaitu berupa daya aktif dan
daya reaktif. Frekuensi suatu sistem pembangkit tergantung terhadap keseimbangan daya aktif yang dihasilkan. Adanya perubahan kebutuhan daya aktif pada satu titik operasi menimbulkan terjadinya perubahan frekuensi sistem karena generator yang mensuplai daya ke dalam sistem berjumlah lebih dari satu. Maka dari itu perlu adanya pembagian kebutuhan daya untuk tiap generator.
Pada Gambar 2.1 sistem AGC dan AVR dipasang pada masing-masing generator. Kontroler di set pada kondisi operasi tertentu untuk memelihara kestabilan frkuensi dan magnitude tegangan agar tidak melebihi batas yang ditentukan.
Perubahan daya aktif dipengaruhi oleh fluktuasi sudut rotor (δ) dan nilai frekuensi (𝑓), sedangkan daya reaktif dipengaruhi oleh perubahan nilai magnitudo tegangan. Kontrol frekuensi beban dan tegangan eksitasi pada generator di analisis secara independen.
Sinyal eror dari sudut rotor ∆δ diperbaiki ketika nilai daya tie-line dan frekuensi diubah dengan mengukur perubahan sudut rotor δ.Sinyal deviasi frekuensi (∆𝑓) dan daya tie-line (∆𝑃𝑡𝑖𝑒) yang
diperoleh lalu dikombinasikan dan ditransformasikan menjadi daya aktif untuk mengatur valve
governor (∆𝑃𝑉). Sinyal ∆𝑃𝑉 dikirimkan ke penggerak utama untuk meningkatkan torsi. Perubahan
nilai output pada generator (∆PG) dipengaruhi oleh penggerak utama dan kondisi ini akan mengubah
nilai frekuensi ∆f dan daya tie-line ∆Ptie [1].
Plant AGC didesain berdasarkan pengaturan sudut rotor pada generator. Perubahan sudut rotor
(∆𝛿) inilah yang dikoreksi oleh sistem agar tetap stabil. Sinyal deviasi frekuensi ∆f dan ∆Ptie
diperkuat dan ditransformasikan menjadi sinyal aktif yang dikirimkan pada penggerak utama untuk menaikkan torsi.
2.1.1 Konsep Respon Generator terhadap Perubahan Beban
Konsep dasar dari pengaturan kecepatan pada sistem pembangkit, yaitu ketika terjadi perubahan nilai beban pada sistem, maka perubahan tersebut direpresentasikan sebagai perubahan output dari torsi elektrik (𝑇𝑒). Torsi elektrik akibat dari perubahan nilai beban tersebut tarik menarik atau
berlawanan arah dengan torsi mekanik (𝑇𝑚) yang dihasilkan oleh putaran turbin pada pembangkit.
Selisih antara nilai torsi mekanik (𝑇𝑚) dengan torsi elektrik (𝑇𝑒) menghasilkan putaran dalam variasi
kecepatan (∆𝜔𝑟) yang direpresentasikan pada Gambar 2.2 berikut.
Gambar 2. 2 Hubungan Kecepatan dengan Torsi
Dimana,
Te = Torka elektrik (pu)
Ta = Torka percepatan (pu) H = Ketetapan inersia (MWsec/MVA) Δωr = Deviasi kecepatan rotor (pu)
Blok diagram pada Gambar 2.2 dijabarkan menjadi persamaan sistematis sebagai berikut. 𝛥𝜔𝑟 = 1 2𝐻𝑠𝑇𝑎 (2.1) 𝑇𝑎= 𝑇𝑚− 𝑇𝑒 (2.2) 𝛥𝜔𝑟 = 1 2𝐻𝑠(𝑇𝑚− 𝑇𝑒) (2.3)
Untuk menganalisis frekuensi sistem, lebih baik diubah ke dalam bentik variable daya mekanik dan elektrik. Hubungan antara torsi dengan daya, yaitu
P = r T (2.4)
Dengan mempertimbangkan adanya deviasi yang kecil pada sistem, maka dapat dituliskan sebagai berikut,
P = Po+ P (2.5)
T =To+ T (2.6)
r= o + r (2.7)
Sehingga, dari persamaan (2.4) dapat dituliskan menjadi,
Po+ P = (o + r)( To+ T ) (2.8)
Hubungan antara nilai gangguan yang memiliki orde tinggi diabaikan, sehingga menjadi,
P = o T + r To (2.9)
Karena daya dan torsi pada sistem memiliki perbedaan mekanik dengan elektrik, maka dituliskan, Pm - Pe = o (Tm - Te) + (Tmo -Teo) r (2.10)
Pada kondisi ideal, torsi mekanik sama dengan torsi elektrik Tmo - Teo dan kecepatan o = 1 dalam
satuan pu, maka persamaan 2.10 dapat dituliskan dalam bentuk sebagai berikut.
Pm - Pe = Tm - Te (2.11)
Sehingga dapat diilustrasikan ke dalam bentuk blok diagram pada Gambar 2.3 berikut.
2.1.2
Konsep Pengaruh Beban Terhadap FrekuensiDaya pada beban pada umumnya terdiri dari suatu gabungan beban yang dalam hal ini merupakan peralatan listrik. Beban listrik dapat dibagi menjadi dua jenis, yaitu beban resistif dan beban aktif. Untuk beban reaktif seperti lampu dan pemanas tidak terpengaruh oleh perubahan frekuensi atau disebut dengan frekuensi bebas. Sedangkan beban aktif seperti halnya motor, perubahan daya listrik dan frekuensi berkaitan dengan perubahan kecepatan motor. Maka dari itu secara keseluruhan karakteristrik frekuensi bergantung pada sebuah beban gabungan. Berikut merupakan persamaan dari beban gabungan.
Pe = PL+ Dr (2.12)
Dimana
ΔPL = Perubahan beban tanpa kepekaan frekuensi
DΔωr = Sensitivitas frekuensi terhadap perubahan beban
D = Konstanta redaman beban
D atau konstanta redaman beban merupakan presentase perubahan beban terhadap 1% perubahan
frekuensi. Jadi, jika D = 3, maka perubahan frekuensi 1% akan memberikan efek perubahan beban sebesar 3%.
Pada Gambar 2.4 berikut menunjukkan blok diagram sistem beban dengan efek redamannya.
Gambar 2. 4 Blok Diagram Sistem Beban
Blok diagram pada Gambar 2.4 dapat disederhanakan lagi menjadi seperti yang tercantum pada Gambar 2.5 berikut.
Gambar 2. 5Penyederhanaan Blok Diagram Sistem Beban
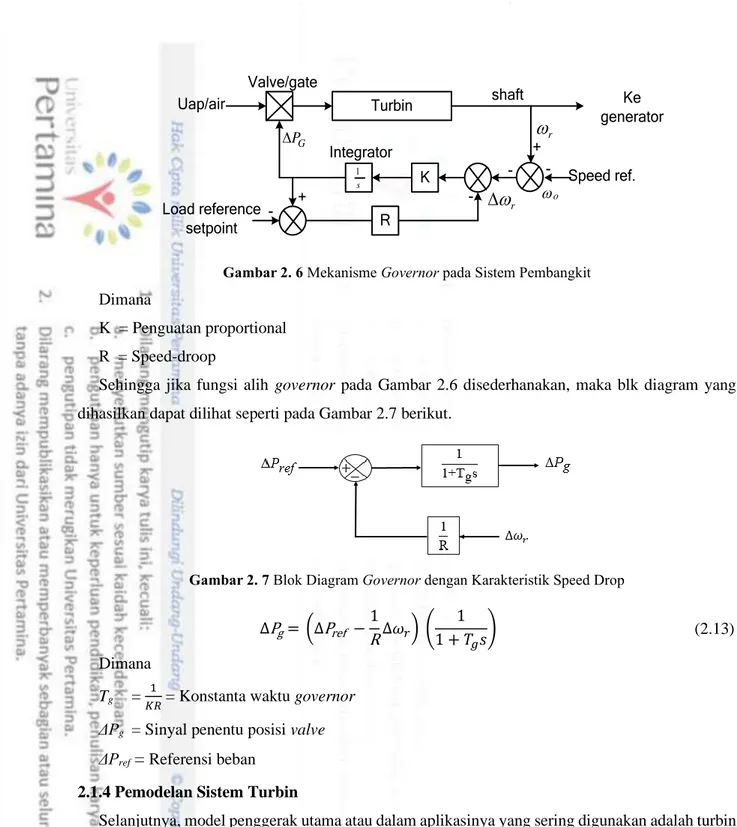
2.1.3 Konsep Pengaturan Valve dengan Governor
Governor pada sistem pembangkit listrik berfungsi sebagai mekanisme kontrol katup/valve pada
turbin. Sinyal eror yang berasal dari perbandingan kecepatan rotor ωr dengan referensi kecepatan
yang telah ditetapkan ωo diperkuat dengan pengontrol integral sehingga sinyal ΔPG mencapai kondisi
Turbin K Valve/gate Uap/air R + -shaft Ke generator Speed ref. o r
-r
G P s 1 Integrator - + Load reference setpointGambar 2. 6 Mekanisme Governor pada Sistem Pembangkit
Dimana
K = Penguatan proportional R = Speed-droop
Sehingga jika fungsi alih governor pada Gambar 2.6 disederhanakan, maka blk diagram yang dihasilkan dapat dilihat seperti pada Gambar 2.7 berikut.
Gambar 2. 7 Blok Diagram Governor dengan Karakteristik Speed Drop
Dimana
Tg =
1
𝐾𝑅 = Konstanta waktu governor
ΔPg = Sinyal penentu posisi valve
ΔPref
=
Referensi beban2.1.4 Pemodelan Sistem Turbin
Selanjutnya, model penggerak utama atau dalam aplikasinya yang sering digunakan adalah turbin dapat dilihat seperti di bawah ini:
Dimana Tt adalah konstanta waktu turbin dan ∆Pm merupakan daya mekanik yang dihasilkan oleh
putaran turbin. Pada Gambar 2.8 dapat dilihat bentuk blok diagram sederhana dari turbin.
Gambar 2. 8 Blok Diagram Sederhana dari Steam Turbine
∆Pg = (∆Pref −1 R∆𝜔𝑟) ( 1 1 + 𝑇𝑔𝑠 ) (2.13) ∆Pm= 1 1+Tts ∆Pg (2.14)
2.1.5 Pemodelan Sistem Automatic Generation Kontrol (AGC)
Selanjutnya sistem dijadikan menjadi suatu model kontrol yang dapat diaplikasikan untuk AGC. Maka jika diambil satu area pada sebuah pembangkit yang menggunakan AGC, sistem yang dimodelkan dapat dilihat seperti pada Gambar 2.9 di bawah ini:
Gambar 2. 9 Blok Diagram AGC Satu Area
2.2 Superconducting Magnetic Energy Storage (SMES)
SMES merupakan suatu alat untuk menyimpan dan melepas daya dalam jumlah besar secara stimultan [5]. SMES pertama kali diusulkan pada tahun 1979 yang mampu menyimpan energi listrik pada medan magnet yang dialiri arus DC [10]. Medan magnet yang dihasilkan berasal dari kumparan konduktor yang didinginkan dengan sistem cryogenic sehingga menjadi superkonduktor yang memiliki nilai loss energy mendekati nol (zero). Komponen sistem pada SMES yang terhubung dengan sistem tenaga listrik terdiri dari kumparan superkonduktor, sistem pendingin cyrogenic dan
power conditioning system (PCS).
Keandalan dari sistem penyimpanan energi SMES merupakan yang paling tinggi dibandingkan dengan sistem penyimpanan energi yang lain karena komponen statis penyusun SMES. Idealnya, ketika superconducting coil melakukan proses charging, arus yang mengalir tidak jatuh dan
magnetic energy pada SMES dapat menyimpan energi tidak terbatas [11]. Pada Gambar 2.10 berikut
merupakan circuit diagram SMES.
Apabila dibandingkan dengan sistem penyimpanan energi yang lain, seperti Battery Energy
Storage System (BESS), Flywheel Energy Storage (FES), Pumped Hydro Energy Storage, dan Compressed Air Energy Storage (CAES), maka SMES memiliki efesiensi tertinggi, yaitu mampu
mencapai 95%. Efesiensi tinggi dari SMES didapatkan karena rugi-rugi daya yang kecil daripada sistem penyimpanan energi yang lain karena resistansinya yang mendekati nol, lebih jauh lagi bahwa pada SMES tidak ada bagian yang bergerak yang membuat SMES tidak memiliki rugi-rugi akibat gesekan. Keuntungan lain adalah bahwa SMES memiliki tingkat discharge yang dapat dikontrol dan memiliki respon yang sangat cepat sehingga SMES dapat diaplikasikan pada daya yang besar dalam
short energy bursts. SMES juga memiliki lifetime yang lama sehingga tepat jika diaplikasikan pada
sistem yang memiliki sirkulasi kontinyu dari pengoprasiannya. Selain itu SMES juga tidak menyebabkan polusi lingkungan.[12]
2.3 Interval Type-2 Fuzzyl logic controler (IT2FLC)
Fuzzy logic merupakan metode kontrol yang pertama kali diperkenalkan oleh Prof. Lotfi A.
Zadeh pada tahun 1965 melalui penelitiannya, yaitu fuzzy sets pada Journal of Information and
Kontrol. Logika fuzzy sendiri merupakan salah satu metode yang terinspirasi oleh cara respon dan
kognisi manusia. Pada logika biasa, hanya terdapat dua nilai, yaitu benar dan salah, dan juga secara digital sistem hanya mengenal nilai 0 dan 1. Sedangkan logika fuzzy mengenal nilai antara benar dan salah. Kebenaran dalam logika fuzzy dapat dinyatakan dalam derajat kebenaran yang nilainya antara 0 dan 1. Seiring dengan berkembangnya ilmu pengetahuan. T1FLC sendiri memiliki kemampuan yang terbatas dalam menangani ketidakpastian sistem yang kompleks. Dari permasalahan itulah Prof. Lotfi Zadeh mengembangkan Interval Type-2 Fuzzy Logic Control (IT2FLC) pada tahun 1975.Berikut merupakan mekanisme kendali logika type-2 fuzzy.
Gambar 2. 11 Mekanisme Kendali Type-2 Fuzzy Logic [13]
Dalam mekanisme sistem kendali IT2FLC, input yang masuk fuzzifikasi dimana dilakukan pemetaan nilai-nilai input ke dalam himpunan fuzzy. Namun pada IT2FLC terdapat Footprint of
keanggotaan primer dari fungsi keanggotaan tipe 2. Upper membership function (UMF) dan lower
membership function (LMF) merupakan dua buah fungsi keanggotaan tipe 1 yang membatasi FOU.
UMF merupakan himpunan bagian yang memiliki derajat keanggotaan tertinggi pada FOU. Sedangkan LMF merupakan himpunan bagian yang memiliki derajat keanggotaan terendah pada FOU dan dapat digunakan dari funsgi keanggotaan T1FLC. Pada Gambar 2.12 berikut dapat dilihat contoh membership function dalam fungsi segitiga.
Gambar 2. 12 Membership Function IT2FLC
Untuk proses selanjutnya sama dengan mekanisme pada T1FLC, yaitu membuat rule base dimana berisi kumpulan pengaturan fuzzy dalam mengendalikan sistem dan proses inferensi, yaitu untuk mengevaluasi aturan kontrol yang relevan dan mengambil keputusan masukan yang akan digunakan oleh sistem yang dinayatakan dalam bentuk IF-THEN.
Hanya saja yang membedakan dari IT2FLC dengan T1FLC adalah proses reduksi, dimana output dari IT2FLC diubah ke dalam himpunan T1FLC, dimana T1FLC memiliki fungsi keanggotaan yang tegas sehingga dapat dilanjutkan ke proses defuzzifikasi. Output dari proses defuzzifikasi yang digunakan sebagai keluaran untuk dikirimkan ke dalam sistem. Pada penelitian ini, IT2FLC berfungsi sebagai sistem kendali untuk mengoptimalkan kinerja dari sistem SMES yang secara otomatis digunakan untuk meminimalkan adanya eror antara output sistem AGC dengan referensi. 2.3.1 Fuzzifikasi
Fuzzifikasi merupakan pemetaan input fuzzy yang bersifat tegas (crisp) ke dalam bentuk fuzzy.
Hal ini dikarenakan dalam penerapan suatu sistem kontrol, besaran input yang diperoleh dari plant akan selalu berupa data-data non fuzzy (crisp) yang bersifat pasti dan kuantitatif, sedangkan pengolahan data dalam FLC didasarkan teori himpunan fuzzy yang menggunakan variable linguistic yang bersifat fuzzy sehingga pada tahap awal FLC diperlukan adanya fuzzifikasi yang dilakukan oleh fuzzifier. Secara umum himpunan IT2FLC dituliskan sebagai berikut [14].
Dimana 𝐽𝑥 ⊆ [0,1] merepresentasikan fungsi keanggotaan utama (primary membership function)
dari 𝑥 dan 𝜇𝐴̃(𝑥, 𝑢) merupakan membership function T1FLC atau disebut dengan fungsi keanggotaan
kedua (secondary membership function). 2.3.2 Rule Base
Cara menentukan rule base, yaitu selain menggunakan logika bahasa secara verbal juga dapat menggunakan pengamatan dari grafik respon output dan error dari sistem. Pada Gambar 2.13 berikut diperlihatkan contoh grafik respon error dan output plant.
Gambar 2. 13 Respon output dan error plant
Dari Gambar 2.13 dapat ditentukan bentuk rule base fuzzy dengan cara sebagai berikut.
1. Pada saat detik ke t = 0, error (e) berada pada posisi “Positif Besar” atau disingkat “PB”. Lalu respon output (u) dari detik ke t=0 menuju detik ke t=2 dibutuhkan sinyal kontrol “Positif Besar”. Sehingga didapatkan rule base, IF e = “PB”, THEN u = “PB”.
2. Pada saat detik ke t = 2, error (e) berada pada posisi “Positif Kecil” atau disingkat “PK”. Lalu respon output (u) dari detik ke t=2 menuju detik ke t=4 dibutuhkan sinyal kontrol “Positif Kecil”. Sehingga didapatkan rule base, IF e = “PK”, THEN u = “PK”.
3. Pada saat detik ke t = 4, error (e) berada pada posisi “Negatif Kecil” atau disingkat “NK”. Lalu respon output (u) dari detik ke t=4 menuju detik ke t=6 dibutuhkan sinyal kontrol “Negatif Kecil”. Sehingga didapatkan rule base, IF e = “NK”, THEN u = “NK”.
4. Pada saat detik ke t = 6, error (e) berada pada posisi “Zero” atau disingkat “Z”. Lalu respon output (u) dari detik ke t=6 menuju detik ke t=8 dibutuhkan sinyal kontrol “Zero”. Sehingga didapatkan
rule base, IF e = “Z”, THEN u = “Z”.
Dari analisa keempat rule base diatas, maka dapat dituliskan dalam bentuk Tabel rule base satu dimensi pada Tabel 2.1 berikut.
Tabel 2. 1 Contoh Rule Base Fuzzy Satu Dimensi.
IF e NK Z PK PB
THEN u NK Z PK PB
Atau jika memiliki membership function yang simetris, jumlah rule base bisa ditambahkan menjadi seperti pada Tabel 2.2 berikut, namun dengan syarat tidak melebihi jumlah syarat rule base.
Tabel 2. 2 Contoh Rule Base Fuzzy Satu Dimensi Simetris
IF e NB NK Z PK PB
THEN u NB NK Z PK PB
2.3.3
Inferensi
Pada proses ini, jika terdapat lebih dari satu kaidah fuzzy yang telah dievaluasi dari rule base, maka output dari proses implikasi tersebut dikombinasikan menjadi sebuah fuzzy set tunggal. Salah satu metode inferensi yang digunakan, yaitu metode Max. Dimana metode inferensi Max ini mengambil nilai maksimum dari proses implikasi.
2.3.4 Tipe Reduksi
Pada interval type-2 fuzzy logic control (IT2FLC) terdapat tambahan step berupa tipe
reduksi diamana proses reduksi ini digunakan untuk mengubah ke himpunan type 1 fuzzy
logic control (T1FLC). Terdapat beberapa metode dalam melakukan proses reduksi, salah
satunya, yaitu center of sets (cos) [14]. Proses reduksi pada IT2FLC ini hamper sama dengan
perhitungan center of area pada defuzzifikasi T1FLC. Hanya saja karena terdapat interval
himpunan pada IT2FLC, maka terdapat dua end point (titik akhir), yaitu
yi sebagai titik tengahdan yr sebagai titik tengah. Pada persamaan (2.16) dan (2.17) berikut dituliskan persamaan yang sering digunakan.
Dimana,
M = Tingkat kuantisasi i = Elemen ke-i
𝑥𝑙 = Titik tengah sumbu x bangun l
𝑥𝑟 = Titik tengah sumbu x bangun r
Al = Luas bangun l Ar = Luas bangun r 𝑥𝑙 = ∑𝑀𝑖=1𝐴𝑙𝑖𝑥𝑙𝑖 ∑𝑀𝑖=1𝐴𝑙𝑖 (2.16) 𝑥𝑟 = ∑𝑀𝑖=1𝐴𝑟𝑖 𝑥𝑟𝑖 ∑𝑀𝑖=1𝐴𝑟𝑖 (2.17)
2.3.5 Defuzzifikasi
Proses defuzzifikasi merupakan proses mengubah harga crisp dari besaran fuzzy. Pada IT2FLC sedikit berbeda dengan T1FLC. Proses defuzzifikasi pada IT2FLC merupakan lanjutam dari metode pada proses reduksi. Pada proses reduksi sebelumnya, digunakan metode center of set dimana telah didapatkan nilai 𝑥𝑙 dan 𝑥𝑟. Sehingga untuk mendapatkan harga sinyal kontrol pada proses
defuzzifikasi hanya perlu menghitung rata-rata dari nilai 𝑦𝑙 dan 𝑦𝑟 seperti yang telah dituliskan pada
persamaan 2.18 berikut.
2.4 Indeks Performansi Eror
Sistem kendali close loop berperan penting untuk mengurangi eror (𝑒(𝑡)) antara setiap variabel dan mencapai nilai nol secepat mungkin. Oleh karena itu, kriteria apapun yang digunakan untuk mengukur kualitas respon sistem harus memperhitungkan variasi eror selama rentang waktu tertentu [15]. Terdapat dua kriteria dasar yang dapat digunakan, yaitu :
Integral of Time Multiplied by Squared Error
𝐼𝑇𝑆𝐸 = ∫ 𝑡{𝑒(𝑡)}2 𝑑𝑡 ∞
0
(2.19)
Integral of Time Multiplied by Absolute Error
𝐼𝑇𝐴𝐸 = ∫ 𝑡|𝑒(𝑡)| 𝑑𝑡
∞
0
(2.20)
Integral of Squared Error
𝐼𝑆𝐸 = ∫ {𝑒(𝑡)}2 𝑑𝑡
∞
0
(2.21)
Integral of Absolute Error
𝐼𝐴𝐸 = ∫ |𝑒(𝑡)| 𝑑𝑡
∞
0
(2.22)
ITSE memiliki pengali waktu tambahan dari galat fungsi yang menitik beratkan pada lamanya durasi galat, oleh karena itu kriteria ITSE paling sering diterapkan dalam sistem yang membutuhkan waktu penetapan yang cepat.
ITAE mengintegrasikan kesalahan mutlak yang memiliki pengali waktu tambahan. Galat yang kecil akan menghasilkan ITAE yang besar setelah waktu yang lama. Kelemahan dari tuning ITAE juga menghasilkan overshoot atau undershoot yang paling tinggi.
𝑥 =𝑥𝑙+ 𝑥𝑟 2
ISE mengintegrasikan kuadrat kesalahan di setiap waktu. Galat yang kecil akan menghasilkan ISE yang besar. Dengan meminimalkan ISE cenderung menghilangkan kesalahan besar dengan cepat, tetapi akan mentoleransi kesalahan kecil yang bertahan untuk jangka waktu yang lama. Respon paling cepat dengan, amplitudo cukup rendah namum terjadi osilasi.
IAE mengintegrasikan kesalahan mutlak dari pada setiap waktu. Hal ini menghasilkan respon lebih lambat dari sistem ISE optimal, tetapi osilasinya lebih berkurang sehingga lebih cepat teredam.
2.5 Respon Transien
Respon transien adalah suatu keadaan dimana sistem mengalami perubahan kondisi yang menunjukkan osilasi teredam menjadi kondisi steady-state. Fungsi dari respon transien ini adalah untuk mengetahui pengaruh output sistem kontrol terhadap input yang diberikan [16]. Untuk menentukan spesifikasi respon transien pada sistem kontrol pada umumnya digunakan enam jenis pengamatan yang terdapat pada bagian respon transien, yaitu :
1. Delay time (𝑡𝑑) (waktu tunda) merupakan waktu yang dibutuhkan respon untuk mencapai
setengah nilai akhir pada saat pertama kali respon bergerak atau dalam kasus ini bergerak dari detik 0
2. Rise time (𝑡𝑟) (waktu bangkit) merupakan waktu yang dibutuhkan respon untuk mencapai nilai
akhir pada saat pertama kali respon bergerak.
3. Peak time (𝑡𝑝) (waktu puncak) merupakan waktu yang dibutuhkan untuk mencapai nilai
overshoot tertinggi.
4. Maximum overshoot (𝑀𝑝) (overshoot tertinggi) merupakan nilai puncak maksimum pada respon.
5. Settling time (𝑡𝑠) (waktu stabil) waktu yang dibutuhkan untuk mencapai nilai akhir respon dengan
presentasi toleransi sebesar 2% atau 5% dari nilai akhir.
6. Underdamped (𝑀𝑢) merupakan nilai terendah setelah terjadi osilasi pada suatu respon.
Pada Gambar 2.14 berikut ditampilkan contoh respon yang menampilkan keenam jenis pengamatan pada suatu respon transien.
BAB III. KONSEP PERANCANGAN
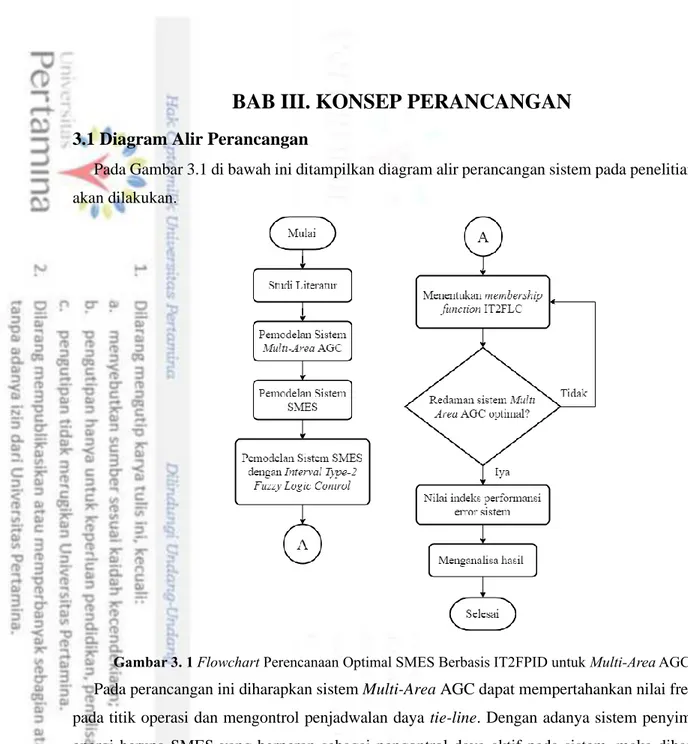
3.1 Diagram Alir Perancangan
Pada Gambar 3.1 di bawah ini ditampilkan diagram alir perancangan sistem pada penelitian yang akan dilakukan.
Gambar 3. 1 Flowchart Perencanaan Optimal SMES Berbasis IT2FPID untuk Multi-Area AGC
Pada perancangan ini diharapkan sistem Multi-Area AGC dapat mempertahankan nilai frekuensi pada titik operasi dan mengontrol penjadwalan daya tie-line. Dengan adanya sistem penyimpanan energi berupa SMES yang berperan sebagai pengontrol daya aktif pada sistem, maka diharapkan
output yang dihasilkan oleh sistem Multi-Area AGC dapat bekerja lebih optimal dalam meredam
osilasi daya maupun frekuensi pada sistem. Selain itu, dengan adanya metode kontrol cerdas berupa
Interval Type-2 Fuzzyl logic controler yang dapat merespon secara cepat terhadap gangguan pada
beban seperti naik turunnya frekuensi dan juga daya, maka diharapkan kinerja dari sistem SMES dalam mengontrol input dan output jauh lebih optimal dan adaptif. Kinerja sistem dapat dikatakan optimal apabila nilai redaman pada sistem multi-area AGC bernilai optimal atau berada pada nilai minimun dari standard yang berlaku dan juga nilai indeks performansi eror yang memiliki nilai paling minimum diantara keempat sistem yang akan disimulasikan. Indeks performansi eror yang digunakan pada penelitian ini, yaitu ITAE, ITSE, IAE, dan ISE.
3.2 Pertimbangan Perancangan
Pada penelitian ini, terdapat beberapa hal yang menjadi pertimbangan dalam melakukan percancangan atau pemodelan sistem, yaitu pemodelan sistem Multi-Area AGC, pemodelan sistem SMES, dan pemodelan sistem kontrol IT2FLC.
3.2.1 Model Linear Multi-Area AGC
Pemodelan sistem Multi-Area AGC didesain berdasarkan penggabungan single-area AGC menjadi dua area AGC yang saling terkoneksi seperti pada Gambar 3.2 berikut.
Gambar 3. 2 Interkoneksi Sistem Tenaga Listrik Dua Area
Dari Gambar 3.2 dapat digambarkan rangkaian ekivalennya sehingga dapat dilihat seperti pada Gambar 3.3 berikut.
Gambar 3. 3 Rangkaian Ekivalen Interkoneksi Sistem Tenaga Listrik Dua Area
Suatu area yang saling terinterkoneksi dihubungkan dengan sebuah reaktansi 𝑋𝑡𝑖𝑒. Pemodelan
sistem AGC pada tiap area digambarkan dalam sebuah rangakian ekivalen sistem pembangkit yang tidak memperhitungkan osilasi dalam setiap mesin yang dimodelkan pada tiap area. Pemodelan linear pada sistem interkoneksi multi area didapatkan dari penggambaran suatu rangkaian ekivalen pada Gambar 3.3. Jika dilinearisasikan untuk perubahan terkecil, maka perubahan daya 𝑃12 dapat
dituliskan pada persamaan berikut.
P12 = T 𝛿12 (3.1)
Dimana 𝛿12 merupakan perubahan kecepatan sudut area satu terhadap area dua 𝛿12= 𝛿1−
𝛿2. Sedangkan T adalah koefisian torsi sinkron antar area. Sehingga dapat digambarkan sistem
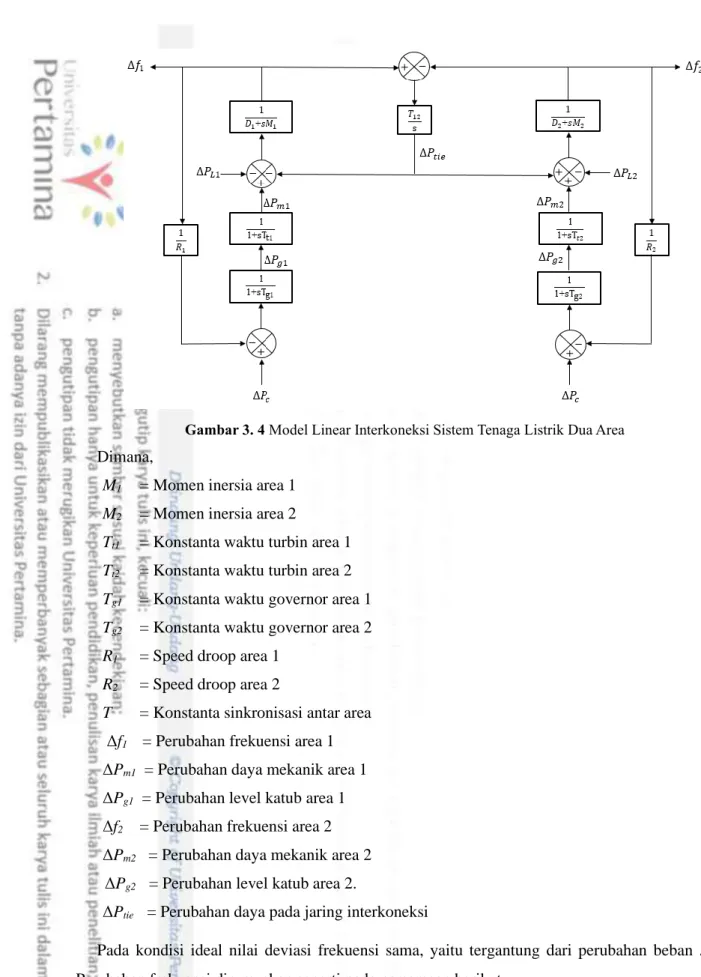
Gambar 3. 4 Model Linear Interkoneksi Sistem Tenaga Listrik Dua Area
Dimana,
M1 = Momen inersia area 1
M2 = Momen inersia area 2
Tt1 = Konstanta waktu turbin area 1
Tt2 = Konstanta waktu turbin area 2
Tg1 = Konstanta waktu governor area 1
Tg2 = Konstanta waktu governor area 2
R1 = Speed droop area 1
R2 = Speed droop area 2
T = Konstanta sinkronisasi antar area Δf1 = Perubahan frekuensi area 1
ΔPm1 = Perubahan daya mekanik area 1
ΔPg1 = Perubahan level katub area 1
Δf2 = Perubahan frekuensi area 2
ΔPm2 = Perubahan daya mekanik area 2
ΔPg2 = Perubahan level katub area 2.
ΔPtie = Perubahan daya pada jaring interkoneksi
Pada kondisi ideal nilai deviasi frekuensi sama, yaitu tergantung dari perubahan beban PL .
Perubahan frekuensi dirumuskan seperti pada persamaan berikut. ∆𝑓 = ∆𝜔1= ∆𝜔2=
−∆𝑃𝐿
(1/𝑅1+1/𝑅2)+(𝐷1+𝐷2)
(3.2) Jika memperhitungkan terjadinya penambahan beban pada area 1 oleh −∆𝑃𝐿, maka untuk area 1,
∆𝑃𝑚1− ∆𝑃12− ∆𝑃𝐿1 = ∆𝑓𝐷1 (3.3)
Dan untuk area 2,
∆𝑃𝑚2+ ∆𝑃12= ∆𝑓𝐷2 (3.4)
Untuk perubahan daya mekanik area 1 dan area 2 tergantung dari regulasi. Sehingga, ∆𝑃𝑚1= − ∆𝑓 𝑅1 (3.5) ∆𝑃𝑚2= − ∆𝑓 𝑅2 (3.6) Dengan mensubstitusi persamaan (3.5) ke dalam persamaan (3.4) dan persamaan (3.6) ke dalam persamaan (3.3), maka didapatkan,
∆𝑓 (1 𝑅1 + 𝐷1) = −∆𝑃12− ∆𝑃𝐿1 (3.7) dan ∆𝑓 (1 𝑅2 + 𝐷2) = ∆𝑃12 (3.8)
Sehingga didapatkan solusi dari persamaan (3.5) dan persamaan (3.6) adalah
∆𝑓 = −∆𝑃𝐿1 (1/𝑅1+𝐷1) + (1/𝑅2+𝐷2) = −∆𝑃𝐿1 𝛽1+ 𝛽2 (3.9) dan ∆𝑃12 = −∆𝑃𝐿 (1/𝑅2+𝐷2) (1/𝑅1+𝐷1) + (1/𝑅2+𝐷2) = −∆𝑃𝐿 𝛽2 𝛽1+ 𝛽2 (3.10) Dimana, 𝛽1= ( 1 𝑅1 + 𝐷1) (3.11) 𝛽2= ( 1 𝑅2 + 𝐷2) (3.12)
β1, β2 = gabungan karakteristik respon frekuensi dari area 1 dan area 2.
Di dalam sistem AGC, sebuah pengontrol area perlu ditambahkan pada sistem, yaitu Area Control
Error (ACE) sehingga sistem dapat ditulis,
𝐴𝐶𝐸𝑖 = ∆𝑃𝑡𝑖𝑒+ 𝛽𝑖 ∆𝑓𝑖 , 𝑖 = 1,2 (3.13)
ACEi adalah kontrol error pada area i, Bi adalah frequency bias constant pada area i, Δfi adalah
perubahan frekuensi pada area i, dan ΔPtie adalah perubahan daya pada tie-line.
3.2.2 Pemodelan Dynamic Sistem SMES
Pada pengaplikasiannya dalam sistem tenaga listrik SMES dapat digunakan sebagai kompensator untuk fluktuasi daya aktif dan reaktif yang diakibatkan oleh fluktuasi beban [17]. Untuk mengontrol secara efektif keseimbangan daya dan titik pengoperasian frekuensi pada pembangkit, maka SMES ditempatkan pada bus generator. Perancangan model sistem SMES orde satu tercantum pada Gambar 3.5 berikut.
Gambar 3. 5 Blok Digaram Orde Satu Sistem SMES [17]
Dimana,
∆𝑓 = perubahan frekuensi 𝐾𝑠𝑚= gain kontrol SMES
𝑇𝑠𝑚 = konstanta waktu SMES
∆𝑃𝑠𝑚 = daya SMES
Pemodelan sistem SMES yang digunakan merupakan diagram orde satu dengan input perubahan frekuensi. Pada penelitian ini SMES berfungsi sebagai additional control yang berfungsi untuk menginjeksi daya aktif pada area satu dan area dua, maka dari itu digunakan gain kontrol SMES dan konstanta waktu SMES untuk pengaruh dari respon daya yang dihasilkan oleh SMES untuk sistem
multi-area AGC.
3.2.3 Pemodelan IT2FLC
Pada penelitian kali ini, performansi sistem Multi-Area AGC dioptimalkan menggunakan SMES yang inputnya dioptimalkan menggunakan sistem kendali IT2FLC.Pada Gambar 3.7 berikut dideskripsikan IT2FLC yang akan digunakan sebagai pengontrol sistem SMES.
Gambar 3. 6 Blok Diagram Sistem IT2FLC
Pada perancangan sistem fuzzy, digunakan dua input dan satu ouput. Input yang digunakan, yaitu berasal dari deviasi frekuensi sistem Automatic Generation Control (AGC) pada masing-masing area. Output dari fuzzy merupakan u yang nantinya akan digunakan sebagai input SMES. Tipe fuzzy yang digunakan, yaitu tipe Mamdani.
1. Fuzzyfikasi
Untuk desain IT2FLC menggunakan tiga membership function pada output dan kedua input f dan df . Membership function didesain berdasarkan respon frekuensi pada sistem AGC. Untuk mendesain
membership function IT2FLC, diperlukan membership function fuzzy type 1 sebagai acuan agar range
Membership function pada input dan output menggunakan 1 tipe segitiga dan dua tipe trapesium.
Pada input (f) digunakan tiga membership function dengan kriteria Negative Big (NB), Negative
Small (NS), dan Zero (Z). Lalu untuk input (df) digunakan tiga membership function dengan kriteria Negative (N), Zero (Z), dan Positive (P). Sedangkan pada output (u) tiga membership function juga
dengan kriteria Negative (N), Zero (Z), dan Positive (P). Proses menentukan range membership
function didasarkan pada sinyal respon yang diambil dari input f dan df pada fuzzy. Untuk membership function output u didesain berdasarkan output dari respon SMES tanpa kontroller.
Berikut merupakan sinyal respon yang diambil digunakan sebagai acuan.
Gambar 3. 7 Respon Input 1 Fuzzy (f)
Gambar 3. 9 Respon Output Fuzzy (u)
Dari respon pada Gambar 3.7 didapatkan range membership function untuk input 1 (f), yaitu [-0.001 0]. Seperti yang dapat dilihat pada Gambar 3.7, respon sinyal input 1 (f) terlihat memiliki nilai maksimal 0 dan nilai minimum -0.0008 yang masuk dalam rentang 0.001 0]. Dari rentang [-0.001 0] dapat dibagi menjadi tiga membership function seperti pada Gambar 3.7 dengan kriteria yang tercantum pada Tabel 3.1 berikut.
Tabel 3. 1 Membership Function Input 1 (f) Fuzzy
Input 1 (f)
NB (Negative Big) tipe trapesium [-1, -1, -0.684, -0.4934] × 10−3
NS (Negative Small) tipe segitiga [-0.594, -0.401, -0.1839] × 10−3
Z (Zero) tipe trapezium [-0.298, -0.161, 0, 0] × 10−3
Lalu untuk respon pada Gambar 3.8 didapatkan range membership function untuk input 2 (df), yaitu [-0.02 0.008]. Seperti yang dapat dilihat pada Gambar 3.8, respon sinyal input 2 (df) terlihat memiliki nilai maksimal sekitar 0.005 dan nilai minimum -0.02 yang masuk dalam rentang [-0.02 0.008]. Dari rentang [-0.02 0.008] dapat dibagi menjadi tiga membership function seperti pada Gambar 3.8 dengan kriteria yang tercantum pada Tabel 3.2 berikut.
Tabel 3. 2Membership Function Input 2 (df) Fuzzy
Input 2 (f)
N (Negative) tipe trapesium [-20, -20, -9.07, -1.963] × 10−3 Z (Zero) tipe segitiga [-5.074, 0, 2.26] × 10−3 P (Positive) tipe trapesium [0, 4.073, 8, 8] × 10−3
Untuk respon pada Gambar 3.9 didapatkan range membership function untuk output (u), yaitu [-0.05 0.02]. Seperti yang dapat dilihat pada Gambar 3.9, respon sinyal output (u) terlihat memiliki nilai maksimal sekitar 0.01 dan nilai minimum -0.05 yang masuk dalam rentang [-0.05 0.01]. Dari rentang [-0.05 0.01] dapat dibagi menjadi tiga membership function seperti pada Gambar 3.9 dengan kriteria yang tercantum pada Tabel 3.3 berikut.
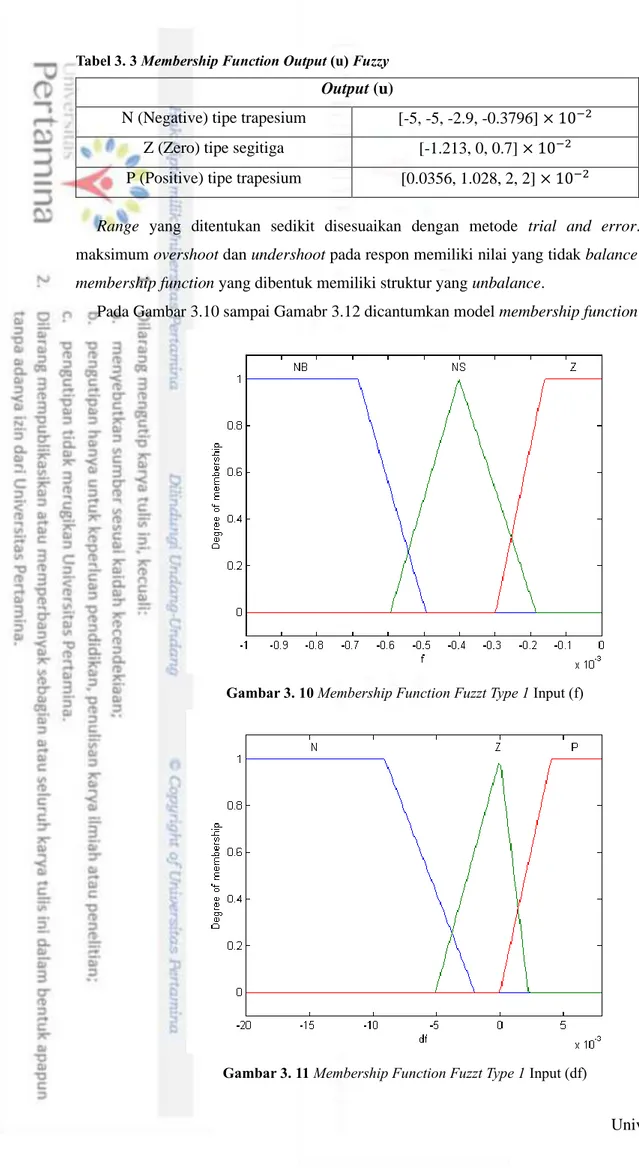
Tabel 3. 3 Membership Function Output (u) Fuzzy
Output (u)
N (Negative) tipe trapesium [-5, -5, -2.9, -0.3796] × 10−2
Z (Zero) tipe segitiga [-1.213, 0, 0.7] × 10−2
P (Positive) tipe trapesium [0.0356, 1.028, 2, 2] × 10−2
Range yang ditentukan sedikit disesuaikan dengan metode trial and error. Karena titik
maksimum overshoot dan undershoot pada respon memiliki nilai yang tidak balance sehingga nilai
membership function yang dibentuk memiliki struktur yang unbalance.
Pada Gambar 3.10 sampai Gamabr 3.12 dicantumkan model membership function fuzzy type 1.
Gambar 3. 10Membership Function Fuzzt Type 1 Input (f)
Gambar 3. 12 Membership Function Fuzzt Type 1 Output (u)
Dari membership function fuzzy type 1 kemudian diberikan range FOU pada masing-masing
input dan output. Untuk membership function input (f) pada IT2FLC diberikan nilai LMF dan UMF
masing-masing sebesar -0.00001 dan +0.00001. Lalu untuk membership function input (df) pada IT2FLC diberikan nilai LMF dan UMF masing-masing sebesar -0.0003 dan +0.0003. Sedangkan untuk membership function output (u) pada IT2FLC diberikan nilai LMF dan UMF masing-masing sebesar -0.0008 dan +0.0008. Setelah diberikan FOU model membership function pada IT2FLC dapat dilihat pada Gambar 3.13 sampai Gambar 3.15 berikut.
Gambar 3. 14 Membership Function Type 2 Fuzzy Logic Input (df)
Gambar 3. 15Membership Function Type 2 Fuzzy Logic Output (u)
2. Rules Fuzzy
Tahap berikutnya, yaitu menentukan rule base yang akan digunakan pada sistem. Pada Tugas Akhir ini digunakan empat rule base yang tercantum pada Tabel 3.4 berikut.
Tabel 3. 4 Rules Fuzzy Logic Control df N Z P f Z Z P P NS N Z P NB N N Z
Aturan kontrol yang dibuat berdasarkan pada statement IF input 1 AND input 2 THEN output 1. Misal IF f adalah Z AND df adalah N THEN u adalah Z. Karena menggunakan AND, maka proses implikasi menggunakan fungsi persamaan berikut.
3. Contoh Perhitungan Interval Type-2 Fuzzy Logic Control
Seperti yang tercantum pada dasar teori pada Bab II, bahwa terdapat lima proses yang terdapat pada mekanisme kontrol IT2FLC yang penggunaannya akan dijelaskan sebagai berikut.
Sebagai contoh, jika input 1 (f) sebesar -0.000229 dan input 2 (df) sebesar -0.00107, maka berapa nilai output yang dikeluarkan sistem IT2FLC adalah sebegai berikut.
a. Proses fuzzyfikasi
Pada proses fuzzifikasi yang terdapat pada IT2FLC, terdapat dua memembership function, yaitu
upper membership function (UMF) dan lower membership function (LMF) yang dapat dilihat pada
Gambar 3.13 sampai Gambar 3.15 yang jika digambarkan secara independen dapat dilihat pada Gambar 3.16 sampai Gambar 3.18 untuk LMF, sedangkan pada Gambar 3.19 sampai Gambar 3.21 untuk UMF.
Gambar 3. 16LMF Input 1 IT2FLC
Gambar 3. 18 LMF Output IT2FLC
Gambar 3. 19 UMF Input 1 IT2FLC
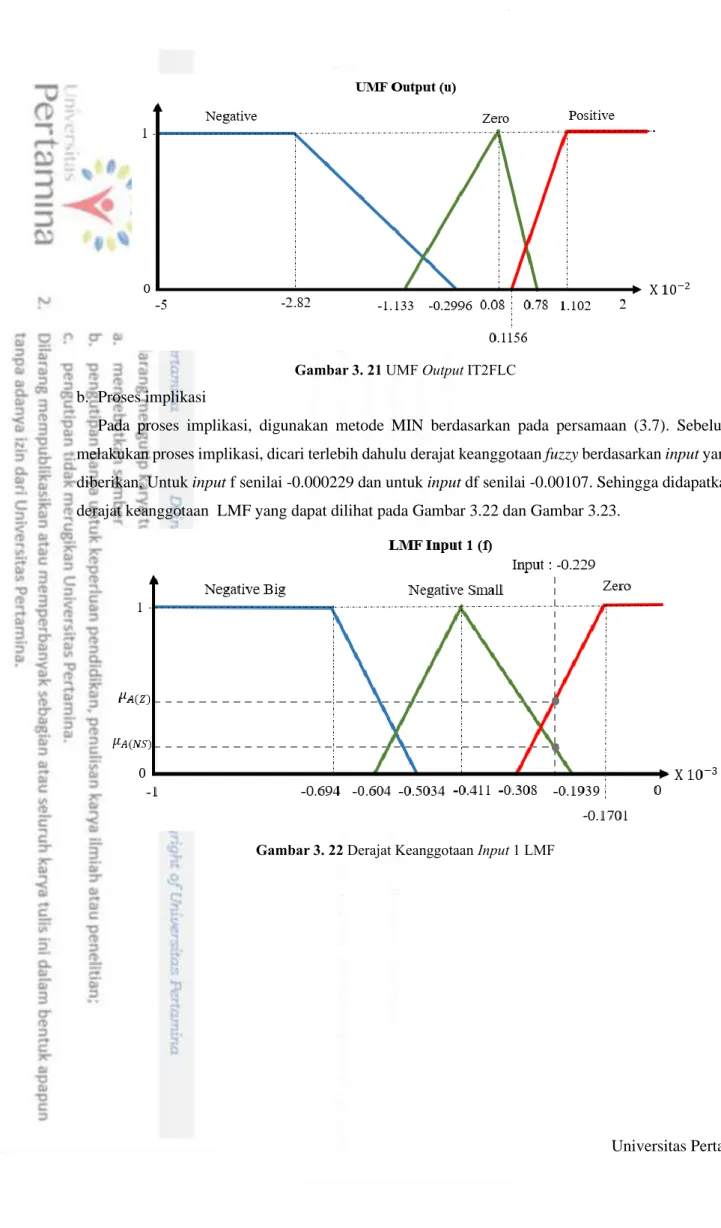
Gambar 3. 21 UMF Output IT2FLC
b. Proses implikasi
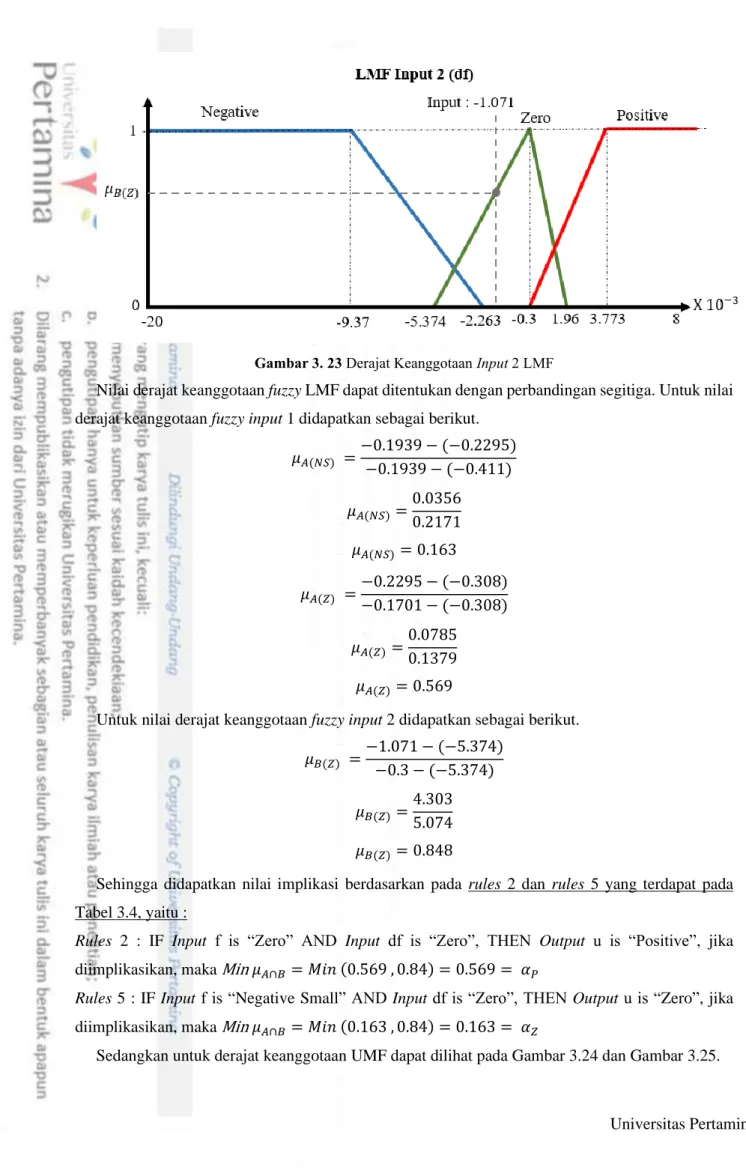
Pada proses implikasi, digunakan metode MIN berdasarkan pada persamaan (3.7). Sebelum melakukan proses implikasi, dicari terlebih dahulu derajat keanggotaan fuzzy berdasarkan input yang diberikan, Untuk input f senilai -0.000229 dan untuk input df senilai -0.00107. Sehingga didapatkan derajat keanggotaan LMF yang dapat dilihat pada Gambar 3.22 dan Gambar 3.23.
Gambar 3. 23 Derajat Keanggotaan Input 2 LMF
Nilai derajat keanggotaan fuzzy LMF dapat ditentukan dengan perbandingan segitiga. Untuk nilai derajat keanggotaan fuzzy input 1 didapatkan sebagai berikut.
𝜇𝐴(𝑁𝑆) = −0.1939 − (−0.2295) −0.1939 − (−0.411) 𝜇𝐴(𝑁𝑆)= 0.0356 0.2171 𝜇𝐴(𝑁𝑆)= 0.163 𝜇𝐴(𝑍) = −0.2295 − (−0.308) −0.1701 − (−0.308) 𝜇𝐴(𝑍)= 0.0785 0.1379 𝜇𝐴(𝑍)= 0.569
Untuk nilai derajat keanggotaan fuzzy input 2 didapatkan sebagai berikut. 𝜇𝐵(𝑍) = −1.071 − (−5.374) −0.3 − (−5.374) 𝜇𝐵(𝑍) = 4.303 5.074 𝜇𝐵(𝑍) = 0.848
Sehingga didapatkan nilai implikasi berdasarkan pada rules 2 dan rules 5 yang terdapat pada Tabel 3.4, yaitu :
Rules 2 : IF Input f is “Zero” AND Input df is “Zero”, THEN Output u is “Positive”, jika
diimplikasikan, maka Min 𝜇𝐴∩𝐵= 𝑀𝑖𝑛 (0.569 , 0.84) = 0.569 = 𝛼𝑃
Rules 5 : IF Input f is “Negative Small” AND Input df is “Zero”, THEN Output u is “Zero”, jika
diimplikasikan, maka Min 𝜇𝐴∩𝐵= 𝑀𝑖𝑛 (0.163 , 0.84) = 0.163 = 𝛼𝑍
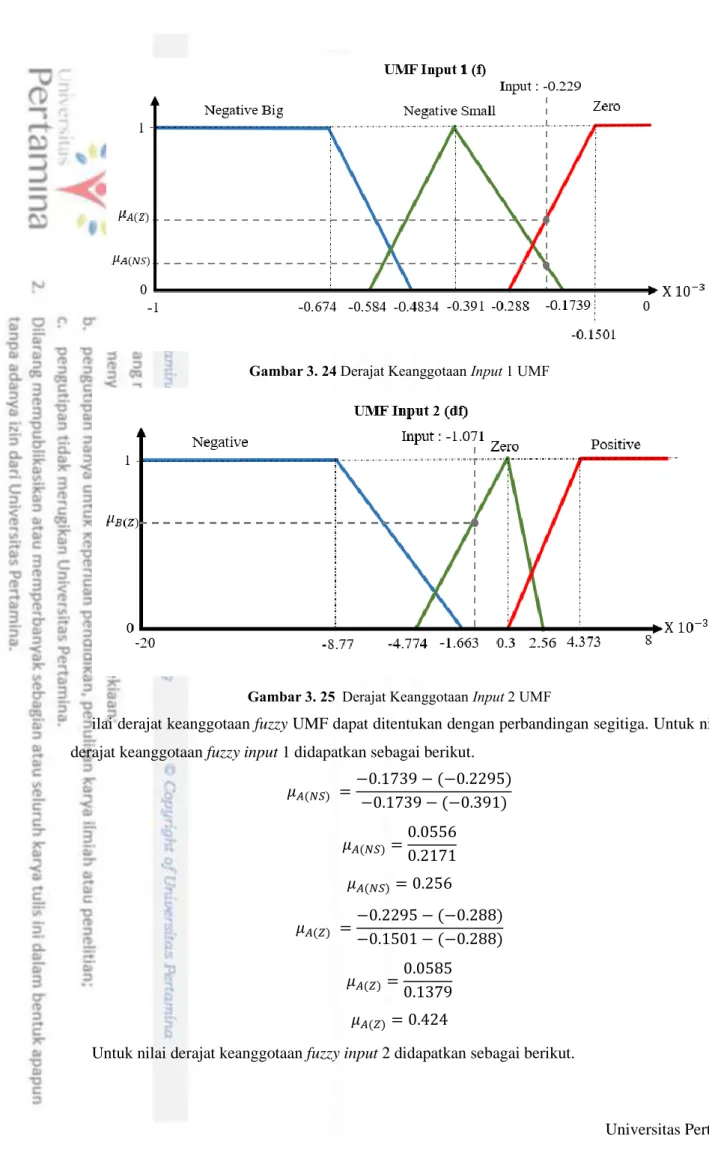
Gambar 3. 24 Derajat Keanggotaan Input 1 UMF
Gambar 3. 25 Derajat Keanggotaan Input 2 UMF
ilai derajat keanggotaan fuzzy UMF dapat ditentukan dengan perbandingan segitiga. Untuk nilai derajat keanggotaan fuzzy input 1 didapatkan sebagai berikut.
𝜇𝐴(𝑁𝑆) = −0.1739 − (−0.2295) −0.1739 − (−0.391) 𝜇𝐴(𝑁𝑆)= 0.0556 0.2171 𝜇𝐴(𝑁𝑆)= 0.256 𝜇𝐴(𝑍) = −0.2295 − (−0.288) −0.1501 − (−0.288) 𝜇𝐴(𝑍)= 0.0585 0.1379 𝜇𝐴(𝑍)= 0.424
𝜇𝐵(𝑍) = −1.071 − (−4.774) 0.3 − (−4.774) 𝜇𝐵(𝑍) = 3.703 5.074 𝜇𝐵(𝑍) = 0,729
Sehingga didapatkan nilai implikasi berdasarkan pada rules 2 dan rules 5 yang terdapat pada Tabel 3.4, yaitu :
Rules 2 : IF Input f is “Zero” AND Input df is “Zero”, THEN Output u is “Positive”, jika
diimplikasikan, maka Min 𝜇𝐴∩𝐵= 𝑀𝑖𝑛 (0.424 , 0.729) = 0.424 = 𝛼𝑃
Rules 5 : IF Input f is “Negative Small” AND Input df is “Zero”, THEN Output u is “Zero”, jika
diimplikasikan, maka Min 𝜇𝐴∩𝐵= 𝑀𝑖𝑛 (0.256 , 0.729) = 0.256 = 𝛼𝑍
c. Proses inferensi
Pada proses inferensi dilakukan penentuan nilai derajat keanggotaan yang akan digunakan pada
output fuzzy. Pada proses ini digunakan metode MAX, dimana ketika terdapat lebih dari satu nilai
derajat keanggotaan yang menyentuh satu membership function output, maka diambil nilai yang paling besar, namun pada kasus kali ini tidak terdapat lebih dari satu derajat keanggotaan yang menyentuh satu membership function pada output. Pada Gambar 3.26 menunjukkan hasil proses inferensi untuk LMF.
Gambar 3. 26Inferensi Output LMF fuzzy
Agar mempermudah perhitungan ketika proses berikutnya, yaitu tipe reduksi, diperlukan nilai m, n, dan p yang didapatkan menggunakan perbandingan segitiga sebagi berikut.
𝛼𝑍 = 𝑚 − (−1.293) −0.08 − (−1.293) 0.163 = 𝑚 − (−1.293) −0.08 − (−1.293) 𝑚 = −1.095
𝛼𝑍 = 𝑛 − (−0.0444) 0.942 − (−0.0444) 0.163 = 𝑛 − (−0.0444) 0.942 − (−0.0444) 𝑛 = 0.116 𝛼𝑃 = 𝑝 − (−0.0444) 0.942 − (−0.0444) 0.569 = 𝑛 − (−0.0444) 0.942 − (−0.0444) 𝑝 = 0.516
Sedangkan pada Gambar 3.27 menunjukkan hasil proses inferensi untuk UMF.
Gambar 3. 27Inferensi Output UMF fuzzy
Agar mempermudah perhitungan ketika proses berikutnya, yaitu tipe reduksi, diperlukan nilai m, n, dan p yang didapatkan menggunakan perbandingan segitiga sebagi berikut.
𝛼𝑍 = 𝑚 − (−1.133) 0.08 − (−1.133) 0.256 = 𝑚 − (−1.133) 0.08 − (−1.133) 𝑚 = −0.822 𝛼𝑍 = 𝑛 − (0.1156) 1.102 − (0.1156) 0.256 = 𝑛 − (0.1156) 1.102 − (0.1156) 𝑛 = 0.368