TUGAS PRAKTIKUM ASISTENSI
SURVEI HIDROGRAFI
“Laporan Praktikum Pengukuran Simulasi Survei Hidrografi dengan
Pengikatan Kemuka Wilayah Parkiran Gedung Robotika”
Dosen : Ir. Yuwono, MT. Khomsin, ST., MT.
Oleh :
Erika Yuniar Tyastiti (3514100005) Raudlah Hawin Ayani (3514100008) Ruli Dwi Susanti (3514100018) Ziyadatul Rofita (3514100066) Liswatul Khasanah (3514100074)
Jurusan Teknik Geomatika
Institut Teknologi Sepuluh Nopember
Ph. 031-5929487
KATA PENGANTAR
Puji dan syukur kami panjatkan ke hadirat Allah SWT, karena atas limpahan rahmat dan hidayah-Nya kami dapat menyelesaikan laporan “Pengukuran Simulasi Survei Hidrografi dengan Pengikatan Kemuka Wilayah Parkiran Gedung Robotika” dengan tepat waktu. Laporan ini disusun sebagai salah satu tugas Mata Kuliah Survei Hidrografi.
Dalam kesempatan ini saya mengucapkan terimakasih kepada : 1 Ir. Yuwono, MT selaku dosen pengajar mata kuliah Survey Hidrografi. 2 Khomsin, ST., MT. selaku dosen responsi mata kuliah Survey Hidrografi
Kami menyadari bahwa dalam penyusunan laporan ini masih jauh dari sempurna, baik dari segi penyusunan, bahasan, ataupun penulisannya. Oleh karena itu kami mengharapkan kritik dan saran yang sifatnya membangun, khususnya dari dosen pengajar dan responsi mata kuliah guna menjadi acuan dalam bekal pengalaman bagi kami untuk lebih baik di masa yang akan datang.
Semoga laporan ini dapat bermanfaat bagi pembaca dan pengembangan ilmu pengetahuan. Aamiin.
Surabaya, 21 Maret 2017
BAB I PENDAHULUAN 1.1. Latar Belakang
Pada metode penentuan posisi secara horizontal, salah satu metode yang digunakan adalah menggunakan metode pengikatan ke muka. Pengikatan ke muka adalah suatu metode pengukuran data dari dua buah titik di lapangan tempat berdiri alat untuk memperoleh suatu titik lain di lapangan tempat berdiri target (rambu ukur/benang, unting–unting) yang akan diketahui koordinatnya dari titik tersebut.
Pada metode ini, pengukuran yang dilakukan hanya pengukuran sudut. Metode pengikatan ke muka menggunakan bentuk dasar dari perhitungan sederhana dari segitiga menggunakan aturan rumus sinus dan cosinus. Sudut yang diukur adalah sudut yang dihadapkan titik yang dicari, maka salah satu sisi segitiga tersebut harus diketahui untuk menentukan bentuk dan besar segitiganya.
Pada praktikum yang dilakukan saat ini merupakan bentuk simulasi sebelum dalam menentukan perhitungannya. Dengan metode pengikatan ke muka untuk survey hidrografi dapat dilakukan penentuan posisi kapal yang memanfaatkan pengukuran jarak dan sudut dari dua buah titik yang telah diketahui koordinat atau dua buah titik dari tempat berdirinya alat.
1.2. Tujuan
Adapun tujuan dari praktikum penentuan posisi adalah:
1. Membuat rencana desain arah, jarak dan sudut dengan alat total station dan stopwatch.
2. Mengukur jarak dan sudut pada alat total station.
3. Mengetahui koordinat hasil pengolahan data hasil pengukuran.
4. Menggambar/melakukan plotting hasil koordinat, jarak, dan sudut yang telah dibidik sesuai dengan letak titik dilapangan dilakukannya survey hidrografi dengan memanfaatkan metode pengikatan kemuka.
1.3. Manfaat
Adapun manfaat dari praktikum penentuan posisi adalah:
1. Mahasiwa mampu membuat rencana desain arah, jarak dan sudut dengan alat total station dan stopwatch.
2. Mahasiswa mampu mengukur jarak dan sudut pada alat total station.
3. Mahasiswa mampu mengetahui koordinat hasil pengolahan data hasil pengukuran.
4. Mahasiswa mampu menggambar/melakukan plotting hasil koordinat, jarak, dan sudut yang telah dibidik sesuai dengan letak titik dilapangan dilakukannya survey hidrografi dengan memanfaatkan metode pengikatan kemuka.
DASAR TEORI 2.1. Survei Hidrografi
Kata hidrografi merupakan serapan dari bahasa Inggris “hydrography”. Secara etimologis, “hydrography” ditemukan dari kata sifat dalam bahasa Prancis abad pertengahan “hydrographique” sebagai kata yang berhubungan dengan sifat dan pengukuran badan air, misalnya kedalaman dan arus (Merriam-Webster Online, 2004). Hingga sekitar akhir 1980-an, kegiatan hidrografi utamanya didominasi oleh survey dan pemetaan laut untuk pembuatan peta navigasi laut (nautical chart) dan survey untuk eksplorasi minyak dan gas bumi (Ingham, 1975). Peta navigasi laut memuat informasi penting yang diperlukan untuk menjamin keselamatan pelayaran, seperti kedalaman perairan, rambu-rambu navigasi, garis pantai, alur pelayaran, bahaya-bahaya pelayaran dan sebagainya. Selain itu, kegiatan hidrografi juga didominasi oleh penentuan posisi dan kedalaman di laut lepas yang mendukung eksplorasi dan eksploitasi minyak dan gas bumi.
Definisi akademik untuk terminologi hidrografi, dikemukakan pertama kali oleh International Hydrographic Organization (IHO) pada Special Publication Number 32 (SP-32) tahun 1970 dan Group of Experts on Hydrographic Surveying and Nautical Charting dalam laporannya pada Second United Nations Regional Cartographic Conference for the Americas di Mexico City tahun 1979. IHO mengemukakan bahwa hidrografi adalah “that branch of applied science which deals with measurement and description of physical features of the navigable portion of earth’s surface and adjoining coastal areas, with special reference to their use for the purpose of navigation”. Group of Experts on Hydrographic Surveying and Nautical Charting mengemukakan bahwa hidrografi adalah “the science of measuring, describing, and depicting nature and configuration of the seabed, geographical relationship to landmass, and characteristics and dynamics of the sea”.
Survei adalah kegiatan terpenting dalam menghasilkan informasi hidrografi. Adapun aktivitas utama survei hidrografi meliputi :
1.
Penentuan posisi (1) dan penggunaan sistem referensi (7)2.
Pengukuran kedalaman (pemeruman) (2)3.
Pengukuran arus (3)4.
Pengukuran (pengambilan contoh dan analisis) sedimen (4)5.
Pengamatan pasut (5)6.
Pengukuran detil situasi dan garis pantai (untuk pemetaan pesisir) (6) 2.2. Penentuan Posisi Titik Fix PerumUntuk penentuan posisi titik fix perum dapat menggunakan kombinasi LOP (Line Of Position, LOP adalah likasi atau keberadaan ) titik-titik dari suatu pengamat yang memiliki satu besaran pengamatan tetap (dari titik referensi yang telah ditentukan
posisinya) yang dapat berupa; arah, jarak, sudut atau beda jarak). Prinsip dasar yang digunakan pada kombinasi LOP garis-garis sama dengan interseksi atau pengikatan kemuka pada ilmu ukur tanah. Metode ikatan kemuka yang diterapkan dalam penentuan posisi ini mengacu pada titik di darat yang telah diketahui koordinatnya. 2.3. Pemeruman
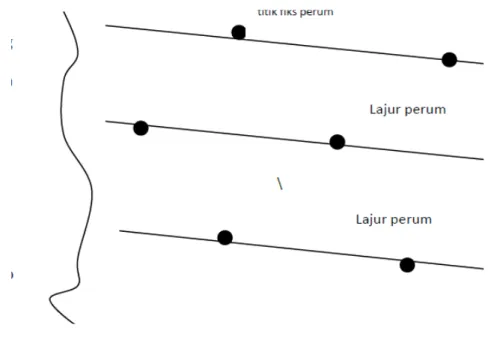
2.3.1. Desain Lajur Perum
Pemeruman dilakukan dengan membuat profil (potongan) pengukuran kedalaman. Lajur perum dapat berbentuk garis-garis lurus, lingkaran-lingkaran konsentrik, atau lainnya sesuai metode yang digunakan untuk penentuan posisi titik-titik fiks perumnya. Lajur-lajur perum didesain sedemikian rupa sehingga memungkinkan pendeteksian perubahan kedalaman yang lebih ekstrem. Untuk itu, desain lajur-lajur perum harus memperhatikan kecenderungan bentuk dan topografi pantai sekitar perairan yang akan disurvei. Agar mampu mendeteksi perubahan kedalaman yang lebih ekstrem lajur perum dipilih dengan arah yang tegak lurus terhadap kecenderungan arah garis pantai.
Gambar 2. Lajur-Lajur Garis Perum Garis Lurus
Dari pengukuran kedalaman di titik-titik fiks perum pada lajur-lajur perum yang telah didesain, akan didapatkan sebaran titik-titik fiks perum pada daerah survei yang nilai-nilai pengukuran kedalamannya dapat dipakai untuk menggambarkan batimetri yang diinginkan. Berdasarkan sebaran angka-angka kedalaman pada titik-titik fiks perum itu, batimetri perairan yang disurvei dapat diperoleh dengan menarik garis-garis kontur kedalaman. Penarikan garis kontur kedalaman dilakukan dengan membangun grid dari sebaran data kedalaman. Dari grid yang dibangun, dapat ditarik garis-garis yang menunjukkan angka-angka kedalaman yang sama.
2.3.2. Prinsip Penarikan Garis Kontur
Teknik yang paling sederhana untuk menarik garis kontur adalah dengan teknik triangulasi menggunakan interpolasi linier. Grid dengan interval yang seragam dibangun di atas sebaran titik-titik tersebut. Nilai kedalaman di setiap titik-titik grid dihitung berdasarkan tiga titik kedalaman terdekat dengan pembobotan menurut jarak. Dari angka-angka kedalaman di setiap titik-titik grid, dapat dihubungkan dari titik-titik yang mempunyai nilai kedalaman yang sama.
2.4. Teknik Pengukuran Kedalaman
Pengukuran kedalaman merupakan bagian terpenting dari pemeruman yang menurut prinsip dan karakter teknologi yang digunakan dapat dilakukan dengan metode mekanik, optik atau akustik. Dalam praktikum ini digunakan metode akustik untuk pengukuran kedalaman.
Penggunaan gelombang akustik untuk pengukuran-pengukuran bawah air (termasuk: pengukuran kedalaman, arus, dan sedimen) merupakan teknik yang paling populer dalam hidrografi pada saat ini. Gelombang akustik dengan frekuensi 5 kHz atau 100 Hz akan mempertahankan kehilangan intensitasnya hingga kurang dari 10% pada kedalaman 10 km, Sedangkan gelombang akustik dengan frekuensi 500 kHz akan kehilangan intensitasnya pada kedalaman kurang dari 100 m. Untuk pengukuran kedalaman, digunakan echosounder atau perum gema yang pertama kali dikembangkan di Jerman tahun 1920 (Lurton,2002).
Alat ini dapat dipakai untuk menghasilkan profil kedalaman yang kontinyu sepanjang lajur perum dengan ketelitian yang cukup baik. Alat perum gema menggunakan prinsip pengukuran jarak dengan memanfaatkan gelombang akustik yang dipancarkan dari tranduser. Tranduser adalah bagian dari alat perum gema yang mengubah energi listrik menjadi mekanik (untuk membangkitkan gelombang suara) dan sebaliknya. Gelombang akustik tersebut merambat pada medium air dengan cepat rambat yang relatif diketahui atau diprediksi hingga menyentuh dasar perairan dan dipantulkan kembali ke transduser.
Untuk pemilihan echosounder, faktor-faktor yang harus diperhatikan adalah sebagai berikut :
kedalaman maksimum daerah yang disurvei sudut pancaran pulsa
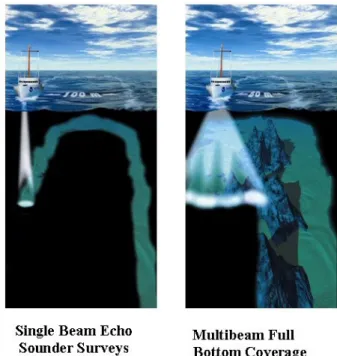
Jenis Echosounder berdasarkan kemampuan kedalaman yang dapat dicapai adalah Echosounder laut dangkal
Gambar 3. Jenis echosounder berdasarkan beam
2.5. Pengukuran Detil Situasi dan Garis Pantai
Detil situasi yang dimaksud disini adalah unsur-unsur yang terdapat di sepanjang pantai, yang sering kali ikut tergambarkan pada peta-peta laut. Unyuk keperluan pelayaran, detil situasi dibutuhkan oleh pelaut untuk melakukan navigasi secara visual. Artinya, detil tersebut dibutuhkan oleh pelaut untuk membantunya dalam penentuan posisi kapal. Seberapa jauh detil yang harus diukur untuk keperluan pembuatan peta laut sangat tergantung dari tujuan pembuatan peta lautnya. Semakin besar skala peta yang akan dibuat, akan semakin rapat detil situasi yang harus diukur. 1. Garis Pantai
Garis pantai merupakan garis pertemuan antara pantai (daratan) dan air (laut). Walaupun secara periodik permukaan air laut selalu berubah, suatu tinggi muka air tertentu yang tetap harus dipilih untuk menjelaskan fisik garis pantai. Pada peta laut biasanya digunakan garis air tinggi (high water line) sebagai garis pantai. Sedangkan untuk acuan kedalaman biasanya digunakan garis air rendah (low water line).
2. Pengukuran Detil Situasi dan Garis Pantai
Pengukuran detil situasi dimaksudkan untuk mengumpulkan data detil pada permukaan bumi (unsur alam maupun buatan manusia) yang diperlukan bagi pelaksanaan pemetaan situasi yang bertujuan memberikan gambaran situasi secara lengkap pada suatu daerah di sepanjang pantai dengan skala tertentu untuk berbagai keperluan. Sedangkan pengukuran garis pantai dimaksudkan untuk memperoleh garis pemisah antara daratan (permukaan bumi yang tidak tergenang) dan lautan (permukaan bumi yang tergenang). Pada dasarnya pengukuran detil situasi dan
garis pantai juga merupakan kegiatan penentuan posisi titik-titik detil sepanjang topografi pantai dan teknik-teknik yang terletak pada garis pantai.
Salah satu metode untuk melakukan pengukuran garis pantai dapat digunakan metode tachimetri. Metode tachimetri merupakan metode yang paling sering digunakan untuk pemetaan daerah yang luas dengan detil yang tidak beraturan. Untuk melakukan pengukuran titik detil tersebut diperlukan suatu kerangka dasar.
Kerangka dasar merupakan titik yang diketahui koordinatnya dalam sistem tertentu yang mempunyai fungsi sebagai pengikat dan pengontrol ukuran baru. Mengingat fungsinya, titik-titk kerangka dasar harus ditempatkan menyebar merata diseluruh daerah yang akan dipetakkan dengan kerapatan tertentu. Terdapat dua macam titik kerangka dasar, yaitu kerangka dasar horisontal dan kerangka dasar vertikal. Dengan adanya titik-titik kerangka dasar maka koordinat titik detil untuk pengukuran garis pantai dapat dihitung dengan sistem koordinat yang sama dengan kerangka dasar tersebut.
2.6. Pengamatan Pasut
Pasang surut ( Pasut ) adalah perubahan kedudukan permukaan air laut yang berupa naik dan turunnya permukaan air laut. Gerakan pasut mengakibatkan gerakan mendatar, yang dirasakan terutama pada daerah yang sempit, seperti selat dan danau, gerakan ini dikenal sebagai arus pasut. Pasut terjadi karena adanya gaya tarik benda-benda di langit, terutama matahari dan bulan terhadap massa air laut di bumi. Fenomena alam tersebut merupakan gerakan periodik, maka pasang surut dan perubahan elevasi air laut yang ditimbulkan dapat dihitung dan diprediksikan.
Alat yang paling sederhana yang digunakan untuk melakukan pengamatan pasut adalah palem atau rambu pasut. Pada dasarnya pengamatan pasut dilakukan dengan cara mengukur tinggi muka air laut terhadap suatu acuan tertentu, yaitu stasiun pengamat pasut. Oleh karena itu harus dilakukan pengikatan palem dengan stasiun pengamat pasut. Pengikatan pengamatan pasut ditujukan untuk menentukan posisi horisontal titik pengamat pasut dan utamanya selisih tinggi palem terhadap titik ikat (BM). Selisih tinggi palem terhadap BM nantinya akan digunakan untuk mendefinisikan tinggi BM itu sendiri setelah bidang referensi kedalaman ditentukan dari pengamatan pasut.
Gambar 4. Konfigurasi Stasiun Pasut
2.7.
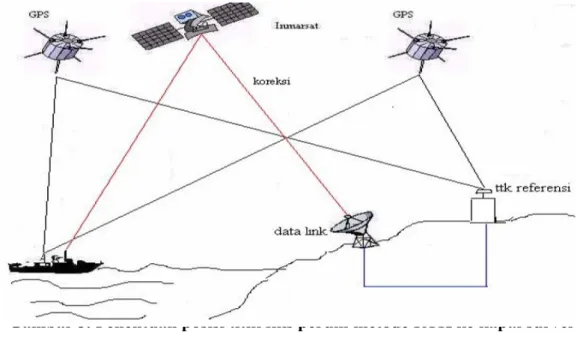
Metode Penentuan Posisi di Laut dengan GPSPenentuan posisi horizontal titik-titik fiks perum umumnya menggunakan sisitem GPS Diferensial, metode ini digunakan untuk penentuan posisi diferensial kinematik secara real time menggunakan data fase ataupun pseudorange. Sistem ini umumnya digunakan untuk penentuan posisi obyek-obyek yang bergerak, dalam kasus penentuan posisi di lingkungan laut umumnya obyek yanag akan ditentukan posisinya selalu bergeraak.
Sistem RTK (Real Time Kinematic) digunakan untuk penentuan posisi real time secara diferensial menggunakan data fase, satu receiver GPS ditempatkan pada base-station dan satu receiver pada rover-station (kapal survei). Implementasi dari tuntutan real time nya stasiun referensi harus mengirimkan data fase atau pseudorange nya ke kapal survei dengan menggunakan sistem komunikasi data tertentu.
Gambar 5. Penentuan posisi titik fiks perum metode RTK ke kapal survei
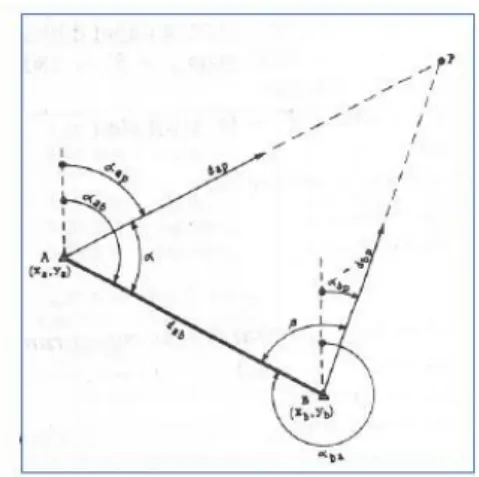
2.8. Pengikatan Kemuka
Pengikatan kemuka adalah suatu metode pengukuran data sari dua buah titik dilapangan tempat berdiri alat untuk memperoleh suatu titik lain di lapangan tempat berdiri target (rambu ukur/benang, unting-unting) yang akan diketahui koordinatnya dari titik tersebut. Garis antara kedua titik yang diketahui koordinatnya dinamakan garis absis. Sudut dalam yang dibentuk absis terdapat target di titik B dinamakan sudut beta. Sudut beta dan alfa diperoleh dilapangan. Pada metode ini, pengukuran yang dilakukan hanya pengukuran sudut. Bentuk yang digunakan metode ini adalah bentuk segitiga. Akibat dari sudut yang diukur adalah sudut yang
dihadapkan titik yang dicari, maka salah satu sisi segitiga tersebut harus diketahui untuk menentukan bentuk dan besar segitiganya.
Gambar 6. Prinsip Pengikatan Kemuka
Pada pengolahan data, kita mencari terlebih dahulu jarak dengan rumus akar dan penjumlahan selisih absis dan selisih ordinat.
dab = xb−xa ¿ yb−ya¿2 ¿ √¿
Azimuth titik A terhadap titik B, kita mencari terlebih dahulu dengan rumus arcus tangen pembgian selisih absis dan ordinat.
Tgn-1 ⍺AB
=
Xb−Xa Yb−Ya
Azimuth titik A terhadap target kita peroleh dari azimuth basis dikurang sudut alfa. Azimuth titik B terhadap target kita peroleh dari azimuth titik A terhadap titik B ditambahkan 180 dan ditambahkan terhadap sudut beta. Jarak A terhadap target B terhadap target diperoleh dari rumus perbandingan sinus. Jarak A terhadap target sama dengan perbandingan jarak absis dibagi sudut 180° dikurang dan β⍺ dikalikan dengan sudut . ⍺
Mencari koordinat P dari titik A Xp = Xa + da. sin αap
Yp = Ya + da.cos αap
Mencari koordinat C dari titik B Xp = Xb + dbp. sin αbp
Yp = Yb + dbp . cos αbp
Koordinat target dapat diperoleh dari titik Adan B. Absis target sama dengan jarak A terhadap target dikalikan dengan sinus azimuth A terhadap target
kemudian ditambahkan dengan absis titik A. Ordinat target sama dengan jarak A terhadap target dikalikan dengan cosinus azimuth A terhadap target kemudian ditambahkan dengan ordinat titik A. Absis target sama dengan jarak B terhadap target dikalikan dengan sinus azimuth B terhadap target kemudian ditambahkan dengan absis titik B terhadap target kemudian ditambahkan dengan ordinat titik B. Nilai koordinat target merupakan nilai koordinat yang diperoleh dari titik A dan B.
DAFTAR PUSTAKA
Djaja, Rochman. 1989. Pasang Surut. Lembaga Ilmu Pengetahuan Indonesia. Jakarta.
Gayo, M. Y. 1992. Pengukuran topografi dan teknik pemetaan . PT Pradnya paramita. Jakarta